高油溫下平衡閥控制方法研究
2022-10-22 02:24:26李友興
技術與市場 2022年10期
關鍵詞:優化
陳 林,李友興
(四川省交通建設集團股份有限公司智能裝備分公司裝備研發中心,四川 成都 610042)
0 引言
筆者所在公司研發的陸地自動化機具液壓鉆機的主起升機構類似于汽車吊的主臂起升,其工況惡劣。在主起升機構下放過程中,結構為負負載,且由于三角形力臂變化,導致了其油缸受力急速變化,且在下放階段的最后行程,載荷最大;同時在行程最后段,還需要做減速處理,讓載荷低速平穩下放,所以導致了集低速、載荷快速變化、負負載的極限工況。
公司采用WESSEL-HYORAULIK的LHW系統平衡閥,性能優異,適合該工況。在國內,環境溫度為-18℃~50℃,設備在這個環境溫度下一直運行平穩,沒有任何異常。但當該機具設備在中東沙漠環境進行工作時,由于該地區夏季環境溫度最高約55℃,加上是沙漠戈壁環境,其地表及1 m以上空間的溫度均在70℃以上。沙漠環境水資源寶貴,無法供應水冷系統需要的水源,故采用了風冷。由于環境溫度太高,液壓系統和環境溫度的溫差很小,液壓系統的熱平衡閥溫度只能保持在65℃~75℃,在這個溫度下設備運行,其臂架結構下放最后行程段的減速效果減弱,導致了下放沖擊加大,甚至無緩沖。油溫越高,其沖擊越大,緩沖效果越差。沖擊的加大,不僅增加了噪音,還增加了結構的變形量,減少了油缸的軸承壽命,影響了設備的壽命。
1 液壓系統優化
1.1 問題分析
原平衡閥的控制原理如圖1所示。平衡閥通過對邊引油控制,通過調整多路閥的控制電流大小來調整閥開度,從而實現速度控制。油缸帶有位移傳感器,其加減速控制都是通過油缸位移作為控制輸入條件的。其電控速度控制邏輯如圖2所示。
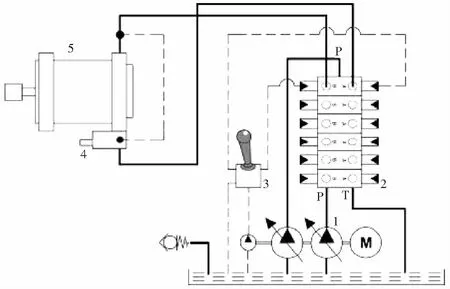
1—液壓油源;2—多路閥;3—控制手柄;4—平衡閥;5—執行結構(油缸/馬達)。圖1 平衡閥控制原理
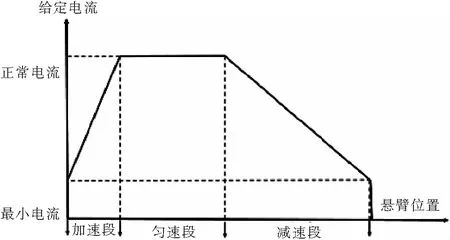
圖2 電控速度控制邏輯
根據現場發現,系統采用ISO VG32液壓油,油溫超過65℃時,其沖擊加大,可以通過調節多路閥的最小控制電流來減弱沖擊,但是在油溫在35℃~60℃時,油缸又會出現運動不到位置就停止的情況。可以得知,在不同油溫下,油液黏度不一樣,導致了閥的響應特性不一致,該方案對于多路閥的性能要求高。同時在測試中發現,采用國外一流品牌的多路閥和采用國產多路閥的設備相比,其受閥特性受油溫影響要小得多,但是考慮到成本、貨期及渠道穩定性,國產化才是趨勢,所以必須從系統優化方面來考慮,降低對多路閥的性能要求。
1.2 解決方案
為了解決該問題,從系統優化方面,可以從優化控制方式和控制邏輯兩個方面進行解決。
1.2.1 優化控制方式
對平衡閥的控制方式進行優化,由對邊直接控制改為先導控制,這樣做有以下優勢:單獨控制更為精準,可以采用電比例控制閥進行先導控制,控制精度高,效果佳;減少控制流量,避免油溫對流量的影響,根據平衡閥的控制流量需求來選擇合適的先導控制閥。其控制原理如圖3所示。
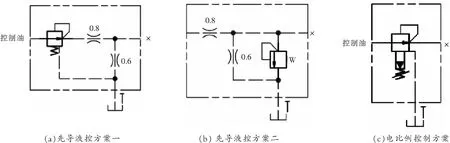
圖3 優化后的控制原理
液控方案一:先通過減壓閥來限制控制壓力,并通過阻尼橋對流量進行限制,并對控制壓力進行比例縮小。
液控方案二:先通過阻尼橋對控制流量進行限制,并對控制壓力進行比例縮小,再通過溢流閥來限制最高的控制壓力。
電比例控制方案:通過電比例減壓閥來直接控制到平衡閥先導的壓力和流量。
上述3個控制方案都可以完成對先導控制的精確控制,各有優缺點(見表1),可以根據情況需求選擇合適的方案。
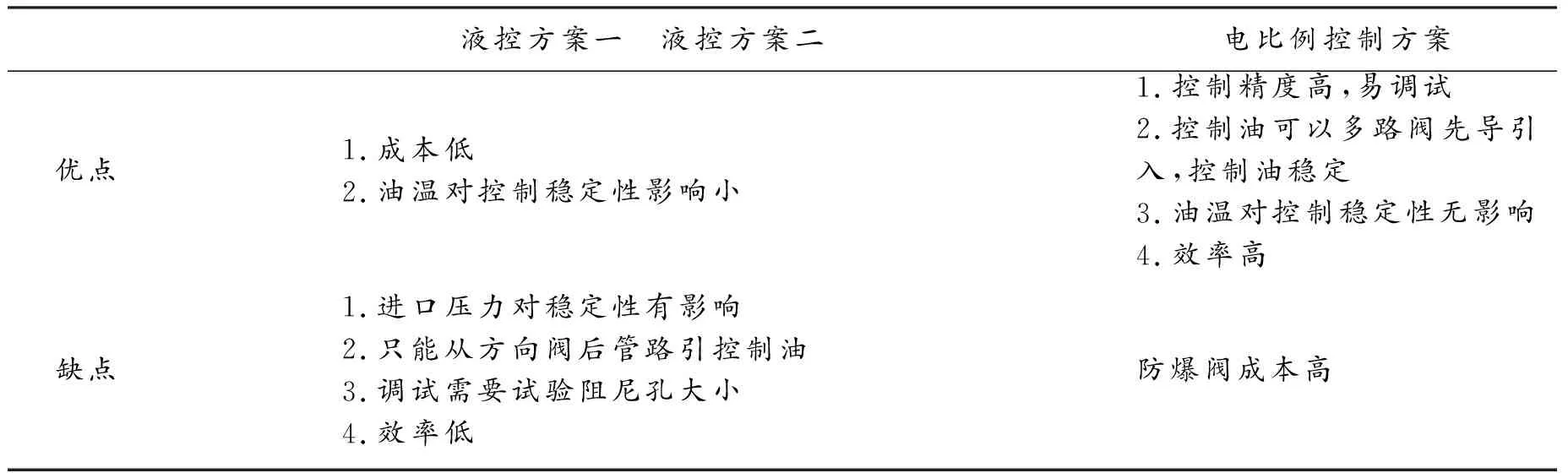
表1 控制方案優缺點對比
1.2.2 優化控制邏輯
對電氣的控制邏輯進行優化,油溫的變化導致最小電流對應閥的開度和流量發生了變化,同樣以位移作為控制的輸入量時,并不能保證機構在行程結束時,剛好完成減速動作,故可以提前完成減速動作,并在最后一段,讓其按照最低速度運動即可,這樣就可以控制住最后一段的速度,從而減少沖擊。人為地在控制上增加了一段“低速爬行段”,其電氣更改后的控制邏輯如圖4所示。
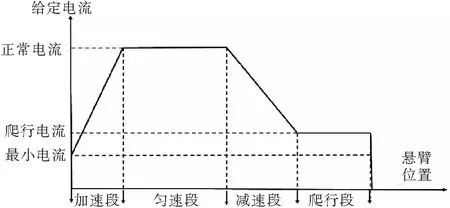
圖4 優化后電控速度控制邏輯
該控制邏輯會犧牲掉一部分效率,增加了運行時間,但是該方案不用增加額外的成本。
2 試驗驗證
為了驗證優化后的控制方案的可行性,制作了測試閥組,其測試閥組的控制原理及實體如圖5和圖6所示。
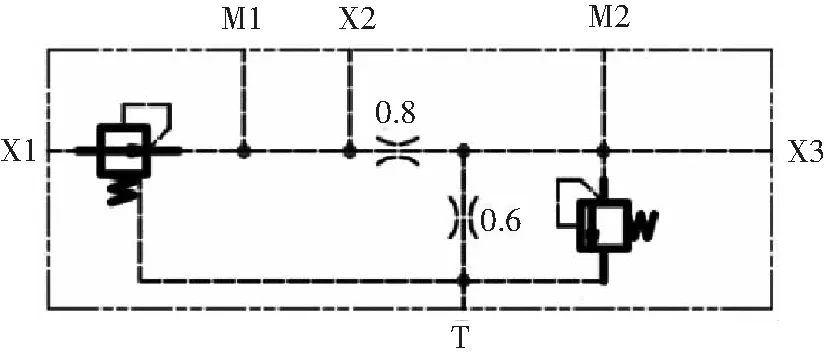
(a)先導液控方案

(b)液控閥組圖5 液控方案測試原理及閥組
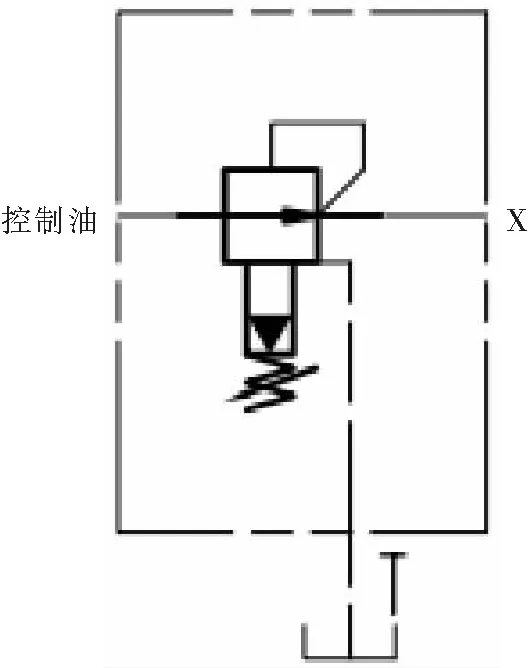
(a)電比例控制方案

(b)電比例控制閥組圖6 電比例方案測試原理及閥組
為了驗證優化控制邏輯的可行性,在調試界面增加了爬行段,用以配合減速速度控制,調試界面如圖7所示。
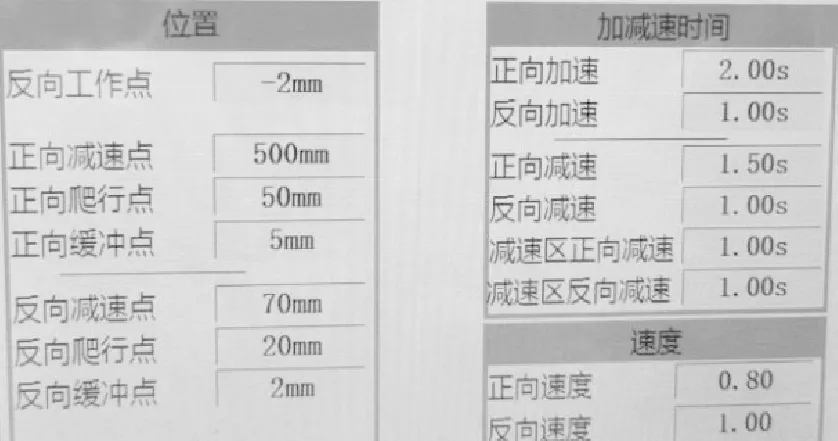
圖7 調試界面
經過試驗,2種方式都可以有效降低高油溫的沖擊,所以2種方式都可行。
3 結語
本文對公司自動化機具臂架結構在低速、載荷快速變化、負負載綜合工況下,在高溫下出現平衡閥控制下放沖擊和緩沖失效的問題進行了分析,找出引發振動的原因,并對原理和控制邏輯進行了優化和實驗驗證。結果證明:優化后的控制方式能解決高油溫下臂架結構的下放沖擊和緩沖失效問題,提高了產品性能。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
