空基回收無人機頭部擾流場CFD仿真與分析
2022-10-29 03:28:44陳嘉李雪兵徐忠楠邢卓琳蘇子康
航空科學技術 2022年10期
陳嘉,李雪兵,徐忠楠,邢卓琳,蘇子康
南京航空航天大學,江蘇 南京 210016
目前,受空中加油的啟發,空基回收方案主要有拖曳浮標對接式回收和機械臂抓取式回收兩種。其中,纜繩拖曳回收方法憑借安全性高、設備簡單等優點已被美國“小精靈”項目采用并完成第三階段演示驗證[4]。但由于柔性纜繩——浮標在空中穩定性較差,對接過程易受氣流擾動的影響[5]。同時,近距對接過程中,無人機頭部擾流場對拖曳浮標存在顯著的干擾作用,進一步影響空中對接安全和效率[6-7]。因此,為提高空中對接精度,提升回收效率和安全性,分析對接過程中存在的外界擾動具有重大意義。
現階段,針對空中對接過程中外界擾動建模與分析,國內外學者已開展了諸多相關研究。如參考文獻[8]在考慮大氣湍流和加油機尾渦擾動下,研究晴空大氣湍流對軟管錐套運動的影響。參考文獻[9]分析了尾渦形成機理和運動規律,建立了較精確地考慮尾渦衰減和擴散特性的尾渦空間流場計算模型,從而研究尾渦對受油機的影響。但是上述研究均未考慮無人機頭部擾流對浮標氣動特性的影響。
本文針對空基回收過程中無人機頭部擾流近距對浮標產生顯著干擾,影響對接安全和效率的問題[10-12],運用計算流體力學(CFD)軟件對其進行仿真研究,并分析其變化規律。首先,借助SolidWorks 軟件對無人機和浮標進行三維建模;其次,運用CFD 軟件圍繞所建模型建立外流場計算域并對其進行網格劃分及迭代計算;再次,模擬仿真多組浮標與無人機間典型相對位置情況下的機頭-浮標附近速度場、壓力場和拖曳浮標所受擾動力數據;最后,分析其隨位置變化規律,實現無人機頭部擾流特性與影響的仿真與分析,其流程如圖1所示。
1 無人機與浮標模型
為使建立的模型更為準確并符合實際,以確保氣動分析的有效性,本文采用SolidWorks 軟件對無人機和浮標進行三維建模。
所選取的浮標模型長約0.83m,直徑為0.5m,而待回收無人機模型參考了美國的“小精靈”無人機[13]。值得注意的是,與常規無人機不同,“小精靈”無人機機腹為平面而非曲面,并且其機翼安裝于機腹,因此在相同情況下,其升力小于普通飛機,機身周圍所產生的氣流也與其他飛機不同,所以其頭部擾流與常規飛機有著明顯差異。為了便于數值計算與分析,仿真前需統一SolidWorks 及CFD 軟件內參考坐標系,即規定坐標原點位于飛機模型機頭中心,z軸正方向指向機尾,y軸垂直向上,x軸指向機身左側,其方向滿足右手定則,如圖2所示。圖3給出了無人機與浮標在對接過程中的三維模型圖。
2 網格生成
本文采用有限元分析方法研究無人機頭部擾流,需要對模型進行網格劃分[14-16]。首先,將所建無人機和浮標模型導入ⅠCEM CFD 網格劃分軟件,并圍繞模型建立外流場計算域[17-18],進而設置外流場屬性,以機頭方向為流體入口,機尾方向為流體出口。然后,針對計算域進行非結構網格劃分。值得注意的是,為了能充分體現出無人機頭部擾流的影響范圍,本文設置外流場計算域為一個較大的立方體。同時,由于浮標尾翼的存在,在進行網格劃分時需要對其進行加密處理,以提高網格整體質量。圖4和圖5分別為浮標在待回收無人機前上方1m 時無人機與浮標以及外流場的網格劃分結果。從圖中可以看出在機身與浮標附近的網格較其他區域更為密集。
3 流體力學計算及分析
3.1 流體力學計算
本文選用具有豐富物理模型、強大解算及前后處理功能,并在航空航天領域有著廣泛應用的Fluent 求解器對所劃分網格進行有限元分析。圖6為網格劃分后無人機與浮標模型在Fluent求解器內的圖形顯示效果。
現今許多消費者,對于食品的第一次接觸往往并不是口感,而是包裝所給予的視覺沖擊。不可否認,許多延續傳統包裝的食品往往會給消費這一種懷舊的情感,并且在市場中也有許多消費者對于某一種類食品只認一個包裝。但是隨著經濟的發展與人民群眾生活水品的提高,消費者對于食品越來越挑剔,而這時,一個好的包裝往往能夠讓某一新產品或需要升級的產品得到消費者的青睞。
由于邊界條件設置為理想氣體,入口邊界來流速度為90m/s,遠低于聲速,不用考慮流體壓縮性的影響,因此,選擇絕對速度格式的壓力基求解器。同時,本文所采用的湍流模型為工業流動計算中使用最為廣泛的雷諾平均N-S模型。而求解模型則選取適用于航空領域的SSTk-ω模型進行求解計算,其k方程和ω方程可以參見參考文獻[19]。
在完成上述參數設置后,可根據具體研究需求設置監視目標和殘差收斂值,以直觀地觀察計算結果。由于本文重點研究無人機機頭部分氣流對浮標的影響,僅需對機頭部分以及浮標位置進行分析即可,因此,主要監測對象為浮標的阻力、升力及速度場。為了讓計算結果更精確,將殘差收斂值設置為0.00001。最后將歷史數據初始化后,根據實際需要選擇迭代次數即可得出結果。
3.2 仿真結果及分析
(1)單獨浮標氣動仿真與分析
為了研究無人機頭部氣流擾動對浮標氣動特性的影響,本文不僅研究了單獨浮標的流體力學,而且針對相對位置不同的無人機與浮標進行了7 組對比試驗,以研究位置變化時無人機頭部擾流對浮標的影響。首先,在給定常值風下,考慮浮標與無人機距離較遠的情況,此時浮標不受無人機頭部擾流的影響,只需單獨對浮標進行計算流體力學的分析。圖7 和圖8 分別給出浮標yz平面的速度矢量圖和速度云圖。
從圖7和圖8可以看到浮標表面速度快而尾部流速慢,并且浮標尾部形成的渦流區流速進一步降低。圖9為浮標外圍壓力云圖,浮標頭部迎風處為正壓區,浮標表面處于負壓區。
圖10 和圖11 分別為浮標的升力和阻力曲線。從圖中可知,在迭代計算60次后阻力收斂至240N附近,而升力收斂至2N附近。產生此現象是由于常值氣流迎角為0,使得浮標上、下表面的氣壓相等,其符合實際情況。
(2)無人機—浮標氣動仿真與分析
考慮到在實際空基回收過程中,由于纜繩易受氣流影響,會使浮標出現在無人機的任何位置,因此,在不改變仿真條件的情況下,本文挑選了7組典型相對位置,即以無人機頭部中心為原點,浮標分別位于無人機的正前方、前上方、正上方、后上方、左前方、正左方以及左上方,具體的坐標見表1。
根據表1 中典型相對位置分別進行7 組對比試驗以分析無人機頭部擾流對浮標氣動力的影響,由于浮標和待回收無人機是軸對稱體,因此,右側氣動數據與左側應保持一致,故本文僅從左側選擇三個典型位置。
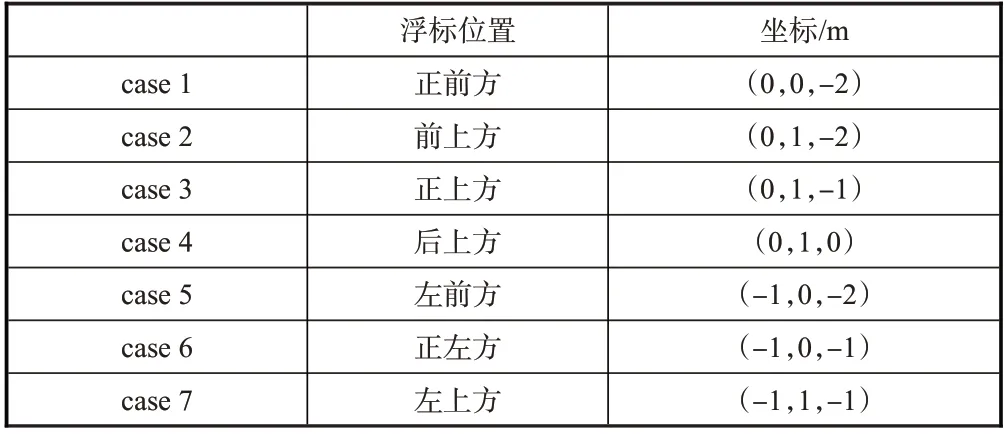
表1 無人機—浮標典型相對位置Table 1 Typical relative position of UAV-drogue
接下來本文以浮標位于坐標(0,1,-1)處為例,即case 3,詳細分析頭部擾流對浮標氣動特性的影響。圖12為case 3外流場計算域網格劃分的結果。
為了提高網格劃分質量,本文對無人機和浮標進行了網格加密。通過網格質量報告可知,本模型的絕大部分網格都滿足求解器的要求,質量小于0.3的不合格網格數只占了不到0.08‰,這說明網格劃分的結果很好。
圖13 和圖14 分別為case 3 處受無人機頭部擾流影響的yz面速度矢量圖和速度云圖,將其與圖7 和圖8 進行對比,可以發現當浮標處于無人機正上方1m 處時,由于常值氣流受無人機頭部影響,氣流方向發生改變,產生斜向上高速氣流作用于浮標兩側。從速度云圖上看,浮標兩側流速要高于其他區域,這從側面印證了速度矢量圖中高速氣流所流向的區域。
圖16 和圖17 分別是在無人機頭部擾流影響下的浮標升力和阻力曲線。從圖中可知,在迭代計算60次后浮標升力收斂至104N 附近,而浮標阻力收斂至417N 附近。進一步將未受無人機頭部擾流影響的浮標升力和阻力與其進行對比,發現升力和阻力都有大幅上升。
根據速度矢量圖(見圖7 和圖13)分析可知,之所以升力和阻力產生大幅變化,是因為原本在常值風下,風向正對浮標沒有迎角,浮標的升力幾乎為0,而在受無人機頭部影響之后氣流方向發生改變,斜向上高速氣流不僅為浮標提供了一個迎角,而且提供了向上的力,因此,增大了浮標的升力。同樣地,原本僅存在正對浮標的氣流阻礙浮標前進,但此時斜向上氣流在提高升力的同時也阻礙了浮標前進,提供了水平分量使其阻力大幅上升。
通過以上分析發現,無人機頭擾流場與浮標間的確存在耦合動力學作用。因此,為了能進一步分析無人機頭部擾流對浮標的影響,此處以case 5 和case 6 情況下的速度矢量圖和速度云圖進行對比,探究無人機頭擾流場與浮標間的耦合動力學作用隨位置的變化規律。由于case 5和case 6情況下浮標與無人機不在同一垂直面上,因此,圖18、圖19與圖20、圖21分別給出case 5和case 6的xz面速度矢量圖及速度云圖。從圖18 和圖19 上看,在case 5 情況下,即浮標位于無人機左前方時,無人機頭擾流場受范圍限制,高速斜向氣流并未直接作用于浮標上,浮標受頭擾流場的影響較小。從圖20 和圖21 上看,在case 6 情況下,即浮標位于無人機正左方時,無人機頭部的高速斜向氣流正好作用于浮標尾翼對其產生影響,具體氣動參數見表2。
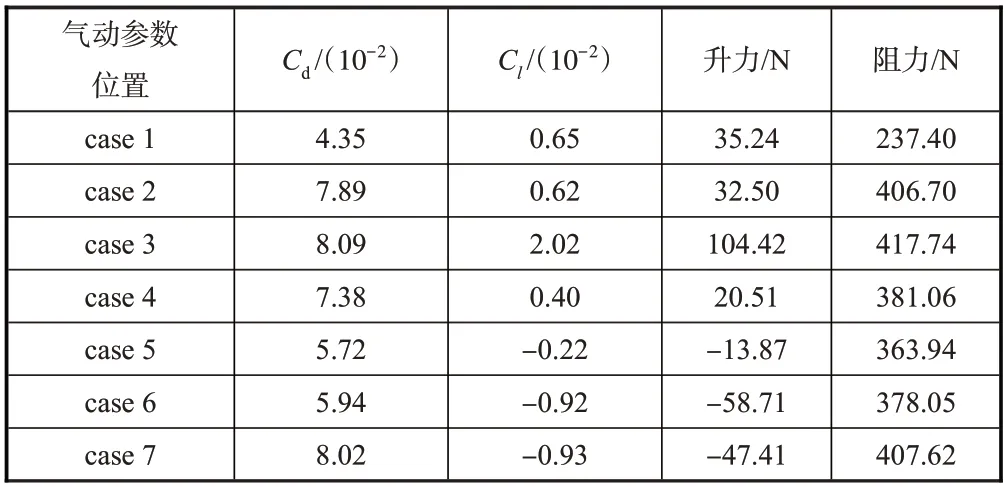
表2 不同位置下頭擾流場對浮標擾動力分析Table 2 Analysis of bow wave disturbing force on drogue at different positions
對比case 5和case 6可知,浮標與無人機處于同一水平高度,此時斜向氣流的垂直分量并未有效作用于浮標,而是使浮標產生負升力,并且水平分量使浮標阻力增大。此外,從case 5 到case 6,即浮標從左前方移動到正左方時,縮小了與待回收無人機機頭間的距離,進一步增大了阻力。綜上,得出結論:浮標越接近頭擾流場,所受氣動影響越明顯,氣動參數變化越大。
4 結論
通過研究,可以得出以下結論:
(1)本文借助SolidWorks 軟件對無人機和浮標進行三維建模并對單獨浮標及受頭部擾流場影響下的浮標進行CFD 仿真,闡述了無人機頭部擾流場特性及其在不同典型位置處對浮標的氣動力干擾影響。
(2)針對空基回收過程中無人機頭部擾流對浮標的影響進行了仿真和分析,得出浮標越接近頭部擾流場,所受氣動影響越明顯,氣動參數變化越大的結論。
(3)若在纜繩拖曳控制中將無人機頭部擾流作為擾動并考慮在對接控制中予以前饋補償,可以提高對接控制的精度與成功率,下一步將在拖曳式無人機空基回收對接控制中進行重點研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
核科學與工程(2015年4期)2015-09-26 11:59:03