基于大數據的汽車駕駛員駕駛意圖識別分析
2022-10-31 11:31:42閆偉胥凌志李嘉頎王俊博袁子洋
農業裝備與車輛工程 2022年8期
閆偉,胥凌志,李嘉頎,王俊博,袁子洋
(250061 山東省 濟南市 山東大學 能源與動力工程學院)
0 引言
車輛為人類社會提供了極大便利,在各領域發揮著重要作用,促進了世界社會和經濟發展。根據駕駛員的駕駛意圖,執行能量控制策略使駕駛員更有操作感,提高燃油經濟性和排放性,因此駕駛意圖識別是近年來的研究熱點。現在前沿的駕駛意圖識別模型包括隱馬爾科夫模型、模糊控制器和神經網絡等[1]。
將隱馬爾科夫模型應用于汽車駕駛員駕駛意圖識別領域,是1997 年由麻省理工學院的LIU 和PENTLAND 等提出的[2]。吉林大學的侯海晶[2]使用混合高斯隱馬爾科夫模型和SVM 建立了識別模型,通過視覺特性推斷駕駛意圖的準確率在90%以上;北京科技大學的YAO YING[3]等人首先對特征向量進行聚類,然后通過隱馬爾科夫模型進行迭代優化,按照安全性和環保型將駕駛風格劃分為不同的駕駛習慣;山東科技大學的GUO[4]等人通過仿真實驗,獲得了視覺、聽覺、嗅覺等動態數據,使用隱馬爾科夫模型來建立意圖識別模型,最終預測駕駛員的情緒轉變準確性可達83%;山東大學的劉洋[5]通過建立模糊控制模型構建了混合動力汽車的能量控制策略并驗證了該控制策略能夠提升整車性能;王姝[6]等人使用支持向量機遞歸特征消除得到的特征向量構建了基于長短時記憶的轉向意圖識別模型,并證明了該模型能夠有效改善汽車穩定性。
本文首先分析了駕駛意圖特征識別參數,進行實車數據采集,對采集數據進行濾波等數據處理。然后分別對加速、制動、轉向和駕駛風格的特征參數進行模糊C 均值聚類(Fuzzy C-means Clustering,FCM),并依據聚類結果建立隸屬度函數和模糊控制規則。
1 數據采集和處理
1.1 實驗設備及儀器
選定加速、制動和轉向數據作為駕駛意圖特征參數。使用型號為豐田系列89510-47040 的制動踏板行程傳感器采集制動數據,如圖1(a)所示。使用型號為豐田系列的89245-02030 的轉向盤角度傳感器采集轉向盤轉角,其測量精度為1.5°,如圖1(b)所示。使用PCAN-USB 采集CAN 總線的加速踏板行程等數據并實時顯示。
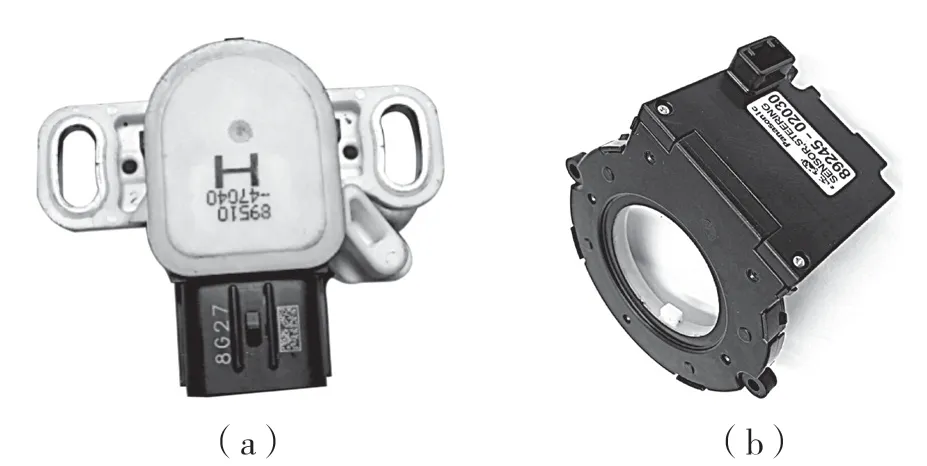
圖1 實驗設備Fig.1 Experimental devices
1.2 數據處理及分析
根據駕駛經驗豐富且駕駛風格不同的駕駛員采集的數據,使用1.1 節中所述傳感器獲取實驗數據并顯示,其具有分時段(早、中、晚),分地段(市區、市郊、高速)的特點。
由于加速踏板行程、制動踏板行程和轉向盤轉角的傳感器信號具有噪聲,使用巴特沃斯濾波器對數據進行濾波,在除去高頻噪聲的同時保留體現駕駛員操作的秒級波動[3]。將數據隨時間從0 附近變化為正值再變化為0 附近的區間識別為一次加速(制動、轉向)過程,可得出此次過程中的數據平均值和數據平均值隨時間的變化率,如圖2—圖4 所示。由圖2 可知,加速踏板行程大部分處在0%~15%之間,在少數情況下加速踏板行程大于20%,加速踏板行程區間變化率大部分位于每秒0%~5%之間。由圖3 可知,制動踏板行程多數集中在20%~40%之間,制動踏板行程區間變化率多數集中在20%~50%之間。由圖4 可知,轉向盤轉向多數為小幅度轉動且轉向盤變化率多數位于0~50°/s 之間。
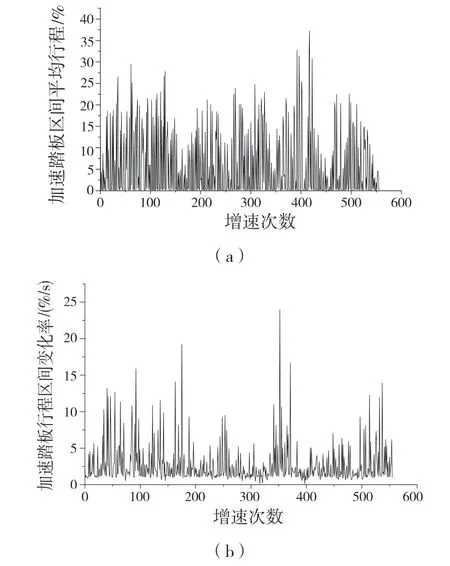
圖2 加速數據Fig.2 Speed up data

圖3 制動數據Fig.3 Braking data

圖4 轉向數據Fig.4 Steering data
2 駕駛意圖識別分析
模糊控制理論的基本思想是在進行控制決策時,首先將輸入的信息轉化為模糊概念,即確定概念的內涵,概念的具體外延模糊(具體數量),通過對輸入值模糊化處理為模糊概念值,根據模糊控制規則計算,最后解模糊得到輸出,最后傳入控制策略執行機構實現被控對象的控制[7]。加速踏板、制動踏板的行程等大小判斷屬于模糊概念范疇,在大部分工況下不能簡單地根據數值范圍分類為大或小,因此使用FCM[8]對加速踏板行程、制動踏板行程、轉向盤轉角等數據進行聚類分析,為下文建立模糊識別模型提供理論基礎。
FCM 的基本思路是將n個特征向量劃分為c個聚類中心,然后根據隸屬度和聚類中心計算損失聚類函數并不斷迭代計算隸屬度和聚類中心,最后使聚類損失函數Jm達到局部最小值。

式中:N——特征向量數;C——聚類中心數,xi——第i個特征向量,cj——第j個聚類中心,uij——xi對于cj的隸屬度。計算出xi和cj的直線距離,m表示迭代次數。
2.1 基于實測數據的駕駛意圖聚類
對1.2 節中的數據進行標準化處理,然后使用R 語言的ppclust 庫進行聚類。將加速、制動、轉向和駕駛風格的數據分別作為特征向量,按第2 列數據升序排序,通過模糊C 聚類可以得到所有數據點分別對加速、制動、轉向和駕駛風格聚類中心的隸屬度,如圖5 所示。由圖5(a)可知,第3類隸屬度在加速踏板行程區間變化率較低時占優,第2 類和第3 類在變化率中等時交替占優,在變化率較高時,第2類占優。由此可知第1類是中等加速,第2 類是快速加速,第3 類是緩慢加速。由圖5(b)可知,第3 類隸屬度在制動踏板行程區間變化率較低時占優,第2 類在變化率中等時占優,第1 類在變化率較高時占優。由此可知第1 類是快速制動,第2 類是中等制動,第3 類是緩慢制動。由圖5(c)可知:前200 個數據點的第3 類隸屬度均很高且波動較小,這是因為城市工況下大部分轉向意圖為變道和保持直行的意圖。在第250 個數據點附近第2類隸屬度較高,此時的駕駛意圖為正常轉向。在最后的樣本點區域第1 類隸屬度飆升,此時的駕駛意圖為緊急情況轉向或者掉頭等意圖。因此第1 類為快速轉向,第2 類為正常轉向,第3 類為緩慢轉向。根據駕駛員的車速波動幅度,平均車速和轉向半徑可將駕駛員駕駛風格分為急躁型、沉穩型和謹慎型。由圖可知,前250 個數據點第2 類隸屬度最高,在第500 個到第1 500 個數據點之間第1 類數據占優。在第2 500 個數據點后第3 類隸屬度占優,可知第2 類是謹慎型,第3 類是急躁型,第1 類是沉穩型。

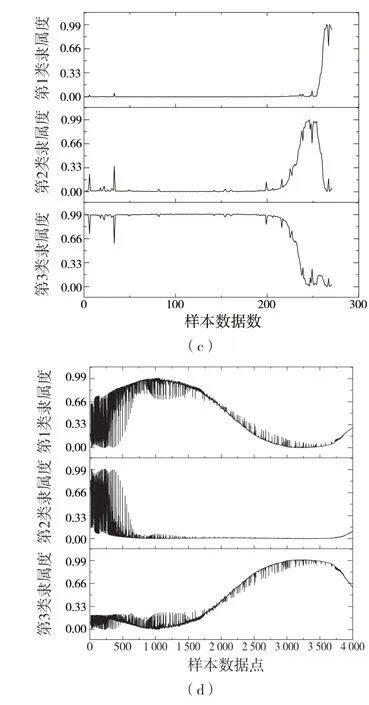
圖5 聚類結果Fig.5 Clustering results
2.2 建立模糊控制器
由聚類結果分別確定加速、制動、轉向和駕駛風格隸屬度函數,并使用MATLAB 建立模糊控制器,隸屬函數如圖6—圖9 所示。

圖6 加速意圖隸屬度函數Fig.6 Accelerated intention membership function

圖7 制動意圖隸屬度函數Fig.7 Braking intention membership function

圖8 轉向意圖隸屬度函數Fig.8 Steering intention membership function

圖9 駕駛風格隸屬度函數Fig.9 Driving style membership function
確定模糊控制規則:首先對每個數據點根據隸屬函數大小判斷出特征向量的模糊值(小,中,大),然后根據聚類結果進行分類計數,取計數最多的類別作為該模糊規則下的識別結果,最終確定的模糊控制規則如表1—表4 所示。

表1 加速意圖模糊控制規則Tab.1 Fuzzy control rules of accelerating intention
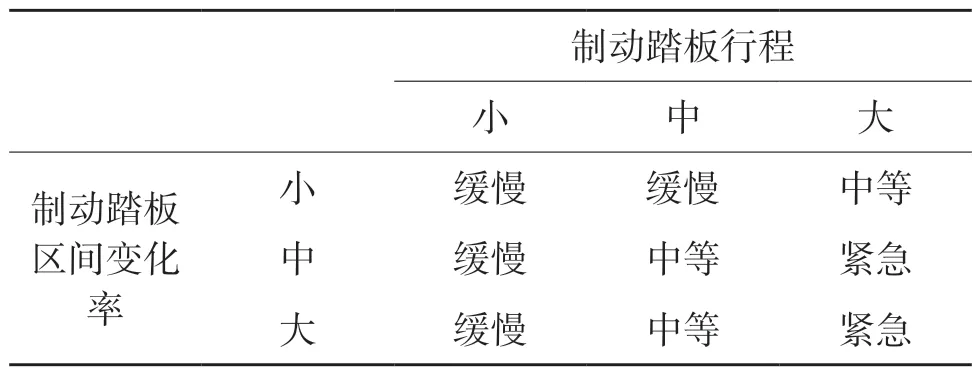
表2 制動意圖模糊控制規則Tab.2 Fuzzy control rules of braking intention
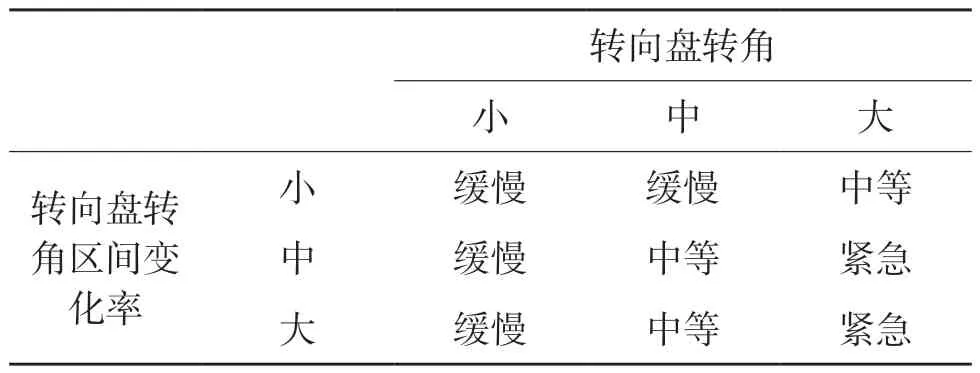
表3 轉向意圖模糊控制規則Tab.3 Fuzzy control rules of steering intention
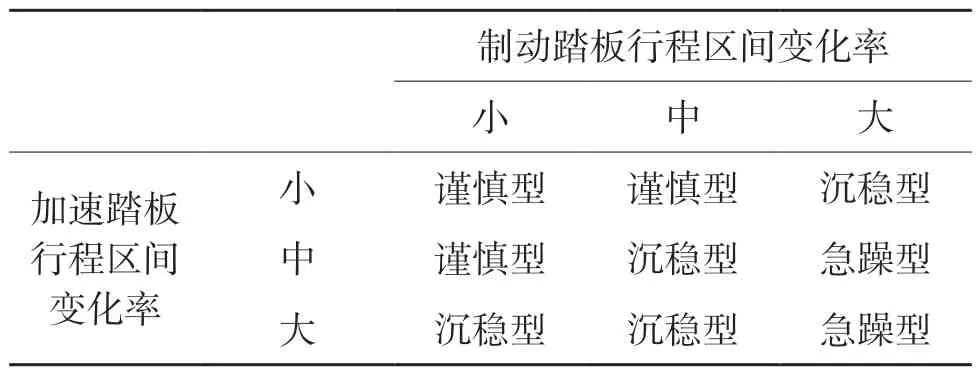
表4 駕駛風格模糊控制規則Tab.4 Fuzzy control rules for driving style
模糊控制器建立完成后,可得其輸入輸出值的三維視圖,如圖10 所示。
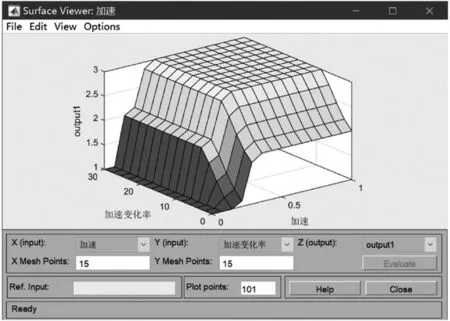
圖10 三維視圖Fig.10 Three-dimensional view
3 結論
為有效識別駕駛意圖,分析了能夠作為識別駕駛員操作意圖的參數,然后通過嵌入式控制器進行實車實驗,采集了與駕駛員操作意圖相關的數據。將實驗所得數據進行處理,分析出數據的集中區間和分布特征并初步確定數據的分類,使用模糊C 均值進行驗證并為建立隸屬函數提供依據。分析了模糊控制系統應用于駕駛意圖識別的優點,根據模糊C 均值結果初步確定了隸屬函數,并通過統計確定了模糊控制規則,最后使用MATLAB 建立了模糊控制模型,為下一步研究打下基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
車主之友(2022年6期)2023-01-30 07:58:16
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
黃河之聲(2017年13期)2017-01-28 13:30:17
光學精密工程(2016年6期)2016-11-07 09:07:19