步進式地下深窄槽鋸切裝備設計
2022-11-23 14:28:46李松濤羅遠新蔣綜明
重型機械 2022年5期
關鍵詞:系統
李松濤,羅遠新,蔣綜明,羅 洋,刁 一,王 好
(1.鄭州鐵路職業技術學院, 河南 鄭州 451460;2.南方工程檢測修復技術研究院,廣東 惠州 516029;3.重慶大學 機械與運載工程學院,重慶 400030)
0 前言
新中國成立以來,我國華北平原耗水量劇增,缺水日益嚴重。上世紀60年代在黃河兩岸修建了大量黃河引水渠,當時由于技術條件的限制,堤壩材料采用泥土,且沒做防滲處理,這些問題堤壩的滲漏在冬季引起缺水。另一方面,由于泥沙常年累月的堆積,河南、山東段黃河河床高于城市和農田,形成危險的地上懸河。而一旦夏季來臨,滲漏的空隙周圍非常容易出現決堤、垮塌風險,洪水決堤會淹沒城鎮、損毀莊稼,造成不可挽回的損失[1,2]。
當前,新型高聚物材料的絕水性能優異,前期試驗表明,厚度在1~3 cm便能取得良好防滲效果,滿足堤壩防滲要求[3-6]。目前高聚物防滲墻的施工工藝,先用翼型薄板,通過靜壓方式成槽,提取翼板的同時開始注漿,分步式成槽注漿形成連續防滲帷幕。但是靜壓成槽時,土體發生塑形變形,土體阻力很大,導致成槽深度較淺,目前只有5 m,5 m以下的部分仍可以滲漏[7-12]。且翼板強行擠開土體,導致孔隙水壓力增大,翼板兩側孔隙因水壓差異使得下沉翼板出現隨機偏斜,導致垂直性差,使相鄰槽不連續,槽縫連接處仍可滲漏。因此,本文將設計一款用于形成地下深窄槽的成型裝備,高聚物材料注入其中形成連續防滲墻,達到防滲目的。
1 總體方案確定
首先選定防滲墻成槽方法,根據方案再擬定設計參數和技術要求,按照執行系統、傳動系統和動力系統三大模塊對本裝備進行方案設計,形成鋸切裝備的初步方案,為本文鋸切裝備設計的基礎。
1.1 成槽方法
因高聚物防滲材料有防滲性能好、柔韌性強、可與大壩協調變形等優點而受到南水北調工程防滲漏工程組的青睞,但在鋪設該高聚物防滲材料之前應開挖出連續且深度足夠、寬度較小的溝槽。因此,需設計開發一款深窄槽成型裝備,同時實現“成槽”和“注漿”兩功能,且應滿足成槽深、槽寬窄和施工對壩體擾動小、施工連續性好、施工作業空間小、性能穩定可靠等特點。因此,為保證成槽連續性等要求,需采用去除材料的方式進行。
目前采取去除材料成槽的方法主要有鋸切成槽、雙輪銑削成槽和抓斗成槽,其特點如表1 所示。經綜合分析,實際工作場合為華北平原,土質單一,為砂土環境,可選取鋸切成槽的工藝,形成連續深窄槽。
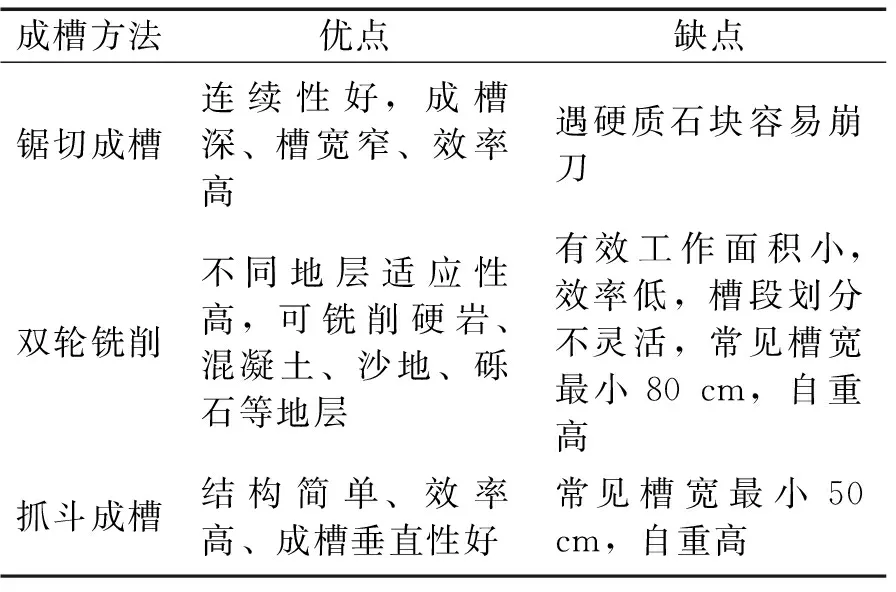
表1 幾種主要成槽方法特點
1.2 執行系統
機械系統中,執行系統將各種形式的能量轉化為所需的機械能,是一個系統的輸出端。工程機械通常都具有兩種功能,即行走功能和作業功能,本裝備應包含有行走機構和成槽機構。該設備設計主要性能包括:設備不偏斜,連續成槽,直線行駛,槽寬不大于50 mm,可拆卸最小單元限寬3 m、限高2.5 m。
1.2.1 行走機構
設備在作業工程中,由于成槽較深,開槽執行機構較大,作業過程中不適于頻繁改變成槽執行機構的狀態。對設備要求體現為兩點:
(1)姿態、平穩性的要求高,需要設備主體剛度較大。
(2)設備的行走軌跡的需保證較高直線度。
為了滿足對設備提出的兩個要求,結合輪軌式結構,本文提出“步進式行走機構”。如圖1所示,在成槽作業過程中,支撐懸架通過四只懸架支腿的支撐保持水平狀態,移動主機和支撐懸梁組成自由度為1的移動副,以保證機構運動軌跡是一條直線。當主機運動到極限位置后,主機四只支腿伸出接地,四只懸架支腿騰空,橫向進給系統反向驅動,使支撐懸架沿著軸方向前移。當主機移動到極限時,懸架支腿伸出接地,主機支腿收回,驅動主機前移。以此實現主機的步進式前行,達到連續開槽的目的。
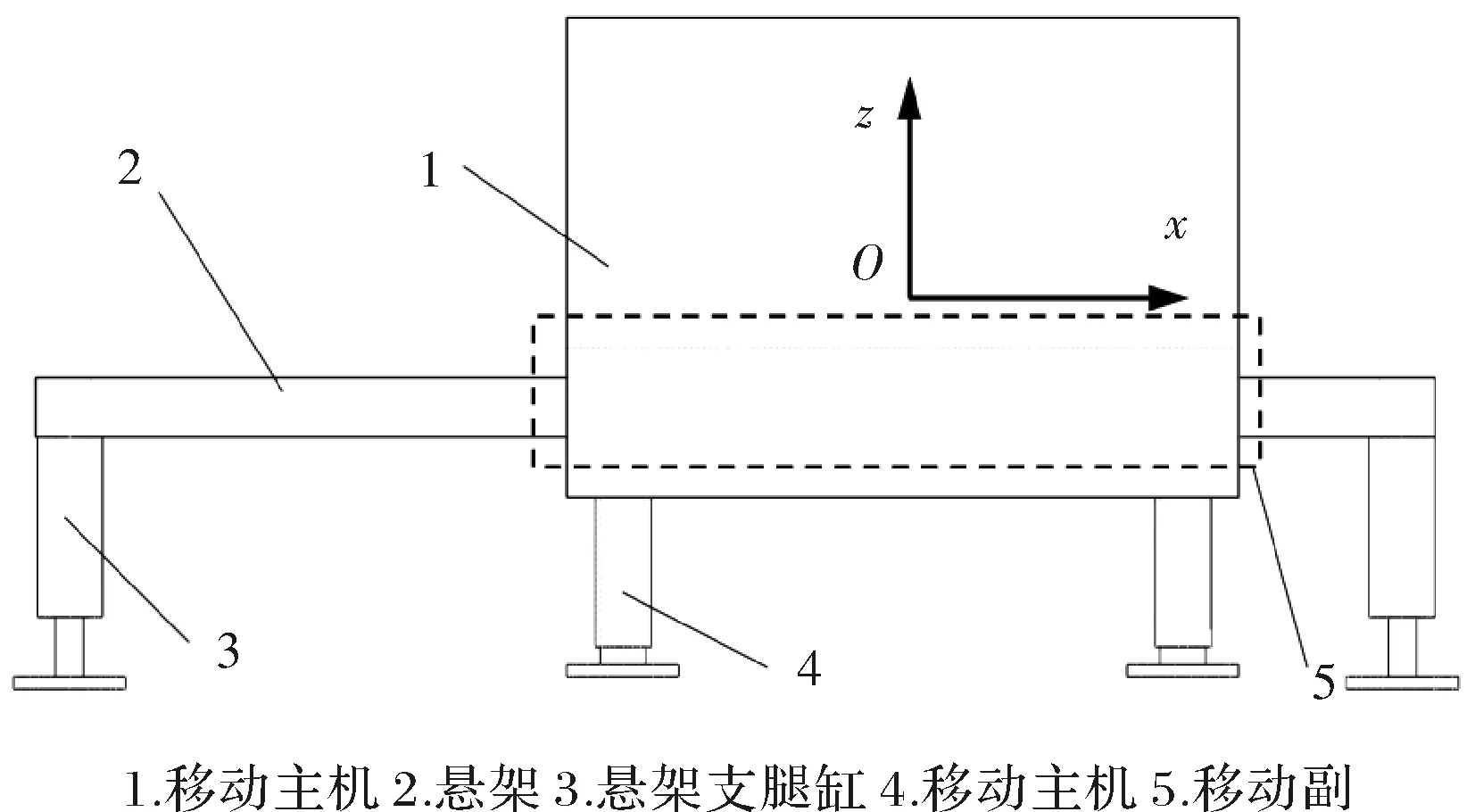
圖1 步態交互式行走機構示意圖
1.2.2 開槽機構
本設備結構設計和工作載荷均具有對稱性,作業過程中受力不易偏載,較易糾正懸架的偏斜問題。鋸片切入土體的過程中可通過外置吊機控制鋸片,使鏈鋸逐步切入土體;注漿系統可與鏈鋸系統平行布置,便于在開槽后第一時間注漿,形成柔性防滲帷幕,有效防止槽的坍塌。施工效率更高,對壩體、河堤、湖堤的擾動更小,防滲效果更優。操作簡便,施工時只用先豎直鋸切,后橫向鋸切,施工完成時以吊機提升鋸片的注漿板即可。
1.3 傳動系統
橫向進給因結構限制,液壓缸設計行程3.7 m、制造成本高、推力易失穩;齒輪傳動精度高、傳動比范圍廣、互換性好,最終選擇了齒輪傳動。
豎向升降中若采用齒輪傳動,會導致齒輪承受鏈鋸、注漿系統的巨大質量,易引起齒面損毀,而油缸設計行程1 m、結構簡單,安裝方便,有過載保護,所以選擇油缸傳動方案。
根據地下深窄槽鋸切填充裝備的實際工作需要,該設備采用液壓驅動方式,油液壓力25 MPa,各部件的運動均直接以液壓力作為直接動力來源。
2 深窄槽鋸切裝備設計
2.1 機械結構設計
在總體方案設計的基礎之上,對各部件受力情況進行了計算。本裝備分成三大結構件,分別為支撐懸架、移動主機和升降裝置。
2.1.1 支撐懸架
懸架作為支撐件,對移動機架起承重和保持直線路徑的作用,所以懸架的結構設計要求比較高,懸架結構如圖2所示。
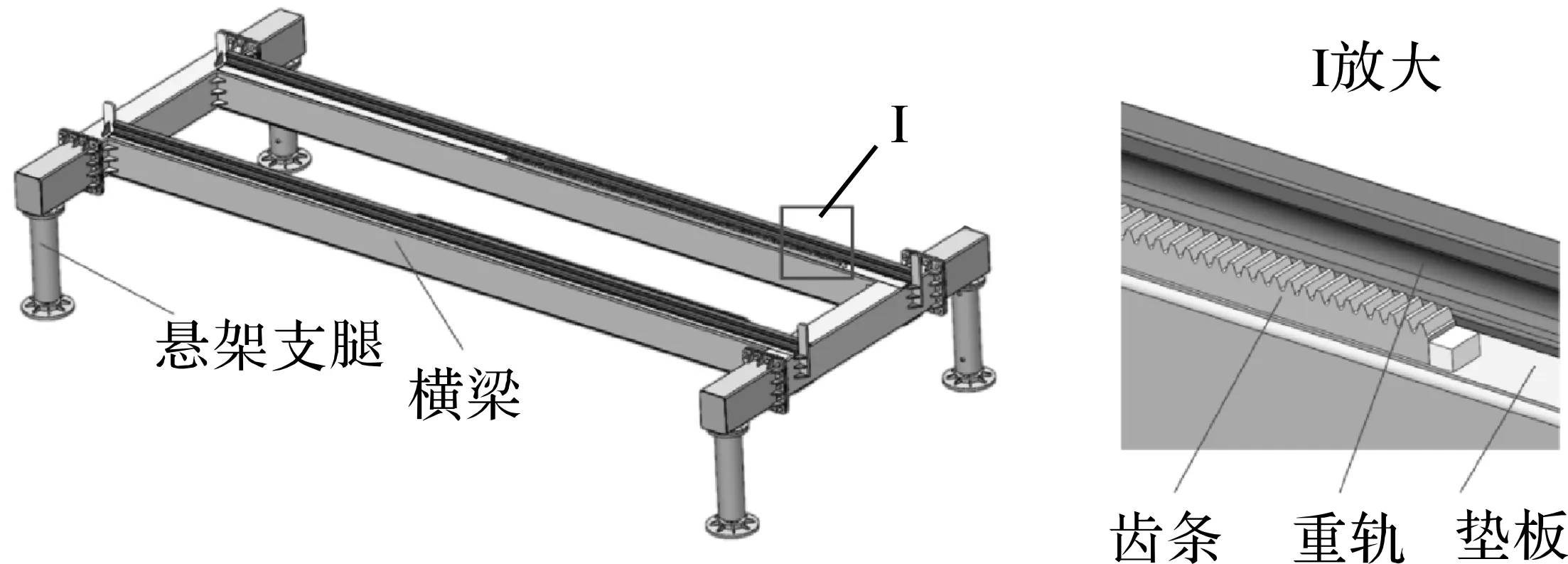
圖2 支撐懸架
支撐懸架主要采用標準矩形鋼管。通過將矩形鋼焊接為一個整體,以保證懸架整體的剛度。橫梁上焊接墊板,重軌和滾輪配合保證直線運動,齒條和齒輪的傳動使移動主機步進式前行。懸架下設有四只可拆卸的支腿油缸,通過單獨控制每只油缸的伸縮,可使懸架保持水平。
通過對懸架進行有限元分析計算,該模型的Mises應力云圖如圖3所示,最大Mises應力值123.8 MPa。位移云圖如圖4所示,懸架中段出現最大縱向位移為6.035 mm。
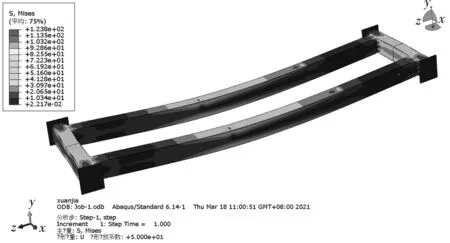
圖3 支撐懸架應力計算結果
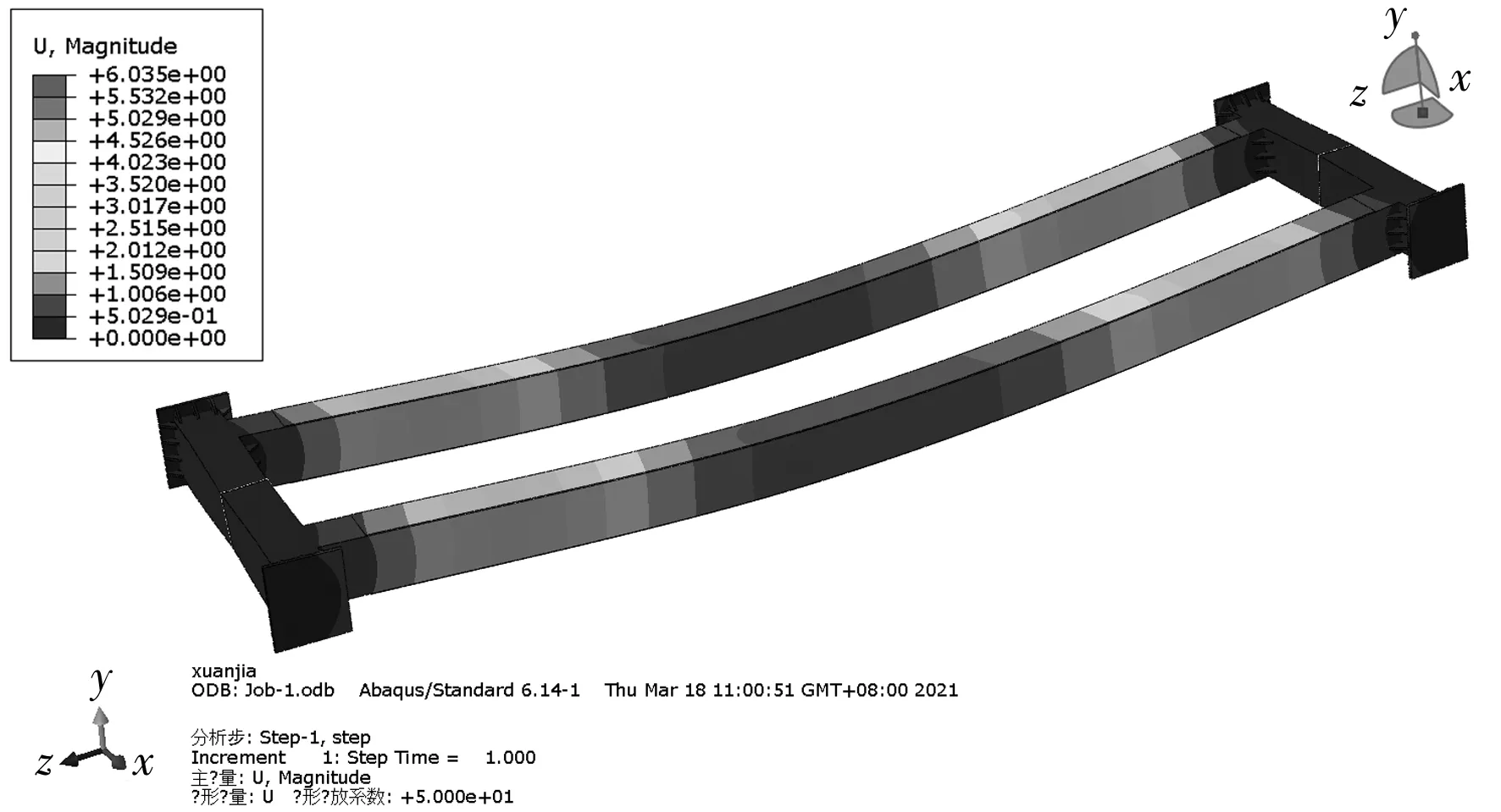
圖4 外框架位移計算結果
2.1.2 移動主機
移動主機在支撐懸架上前移,帶動鏈鋸系統前行鋸切土體。主機與懸架之間、主機與鏈鋸系統之間均有相對運動,主機結構如圖5所示。

圖5 移動主機
移動主機主要分為外框架、主機支腿和夾緊油缸三部分。如A向視圖所示,導軌滾輪和支撐滾輪將懸架緊緊包裹,使主機和懸架之間形成一移動副。
夾緊油缸如圖6所示,分為銷軸缸和導套鎖緊缸,兩者對鏈鋸系統、注漿系統起夾持作用,用于實現鏈鋸系統、注漿系統的步進式運動。
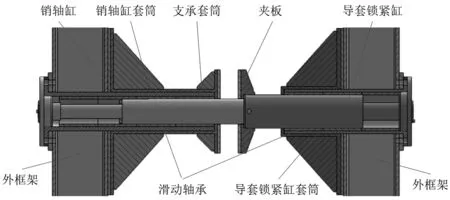
圖6 外框架與夾緊裝置安裝圖
為便于生產加工,將圖7中A1、D1、A2和D2共4處夾緊裝置以相同參數和樣式進行設計,其具體安裝情況如圖7所示。經分析計算,圖7中D1和D2兩處受力最大,且4處設計結構相同,所以只對外框架上D1和D2兩處結構進行校核即可。
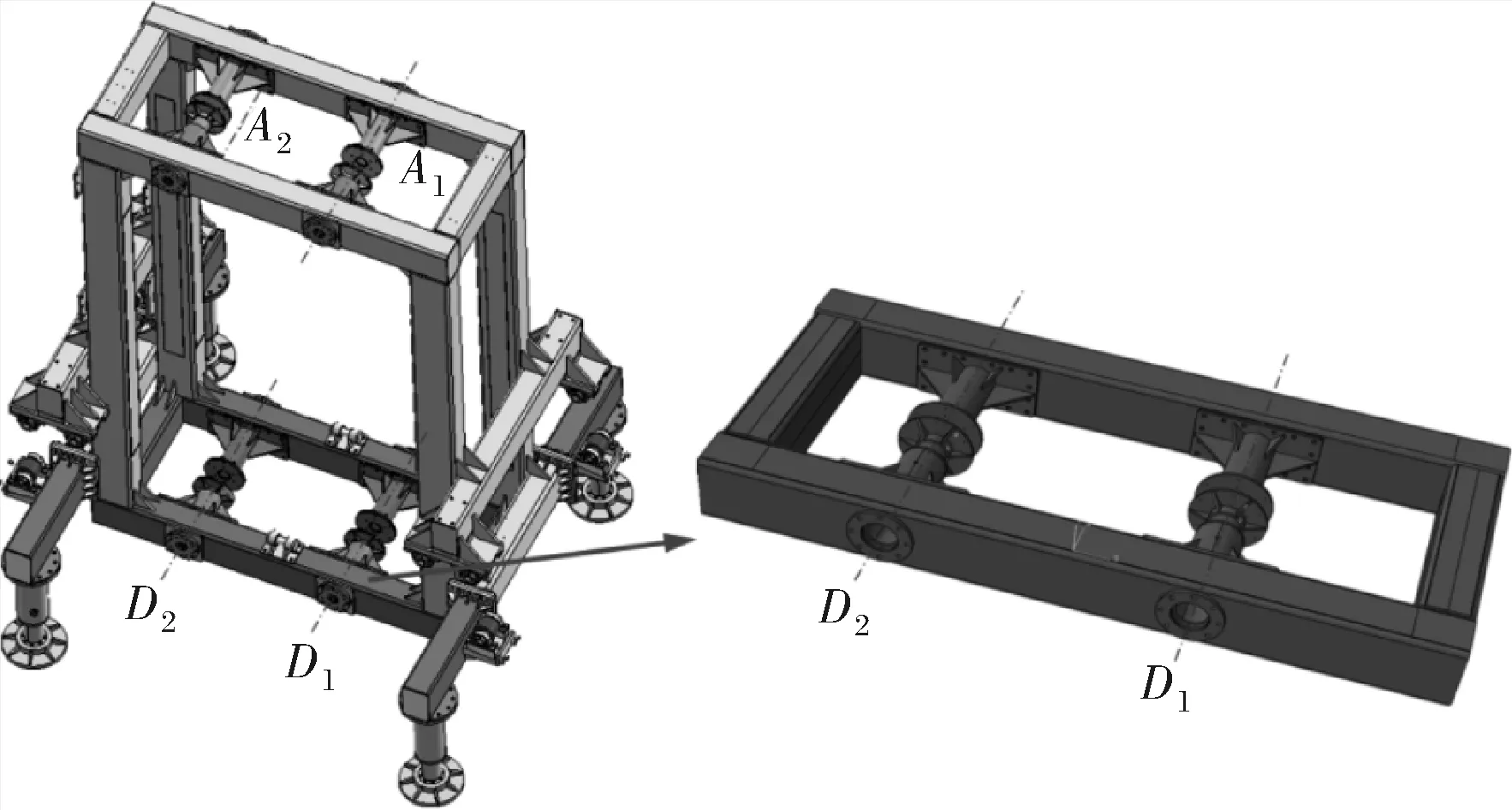
圖7 外框架有限元模型
通過分析計算,該模型的Mises應力云圖如圖8所示,最大Mises應力值124.7 MPa,發生在D1上面支撐套筒的肋板處。
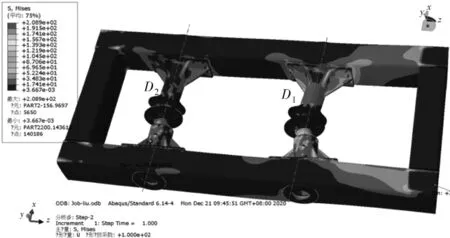
圖8 外框架應力計算結果
位移云圖如圖9所示,最大位移為0.873 6 mm,出現在D1的支撐套筒上,總體上位移較小。
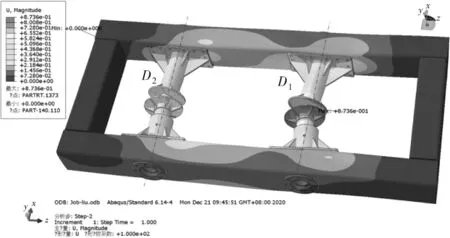
圖9 外框架位移計算結果
2.1.3 升降裝置
升降裝置是鏈鋸系統、注漿系統同移動主機之間的連接機構,主要對鏈鋸系統和注漿系統的上下運動起升降作,如圖10所示。
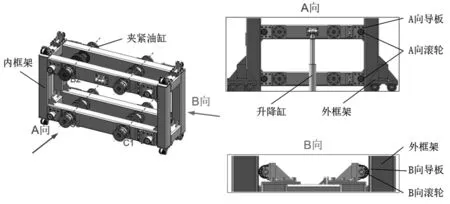
圖10 升降裝置
如A向視圖和B向視圖所示,內框架上的滾輪同外框架上的導板緊密接觸,使移動主機和升降裝置形成一豎直方向的移動副。升降缸推動內框架上下運動,在夾緊油缸的作用下實現鏈鋸系統、注漿系統的步進式升降。
夾緊油缸對鏈鋸系統、注漿系統起夾持作用,因其受力較大,其安裝較復雜,須有支撐套筒、肋板等加強件,具體如圖11所示。油缸組B1、C1、B2和C2四處受力情況簡單,受力較小。
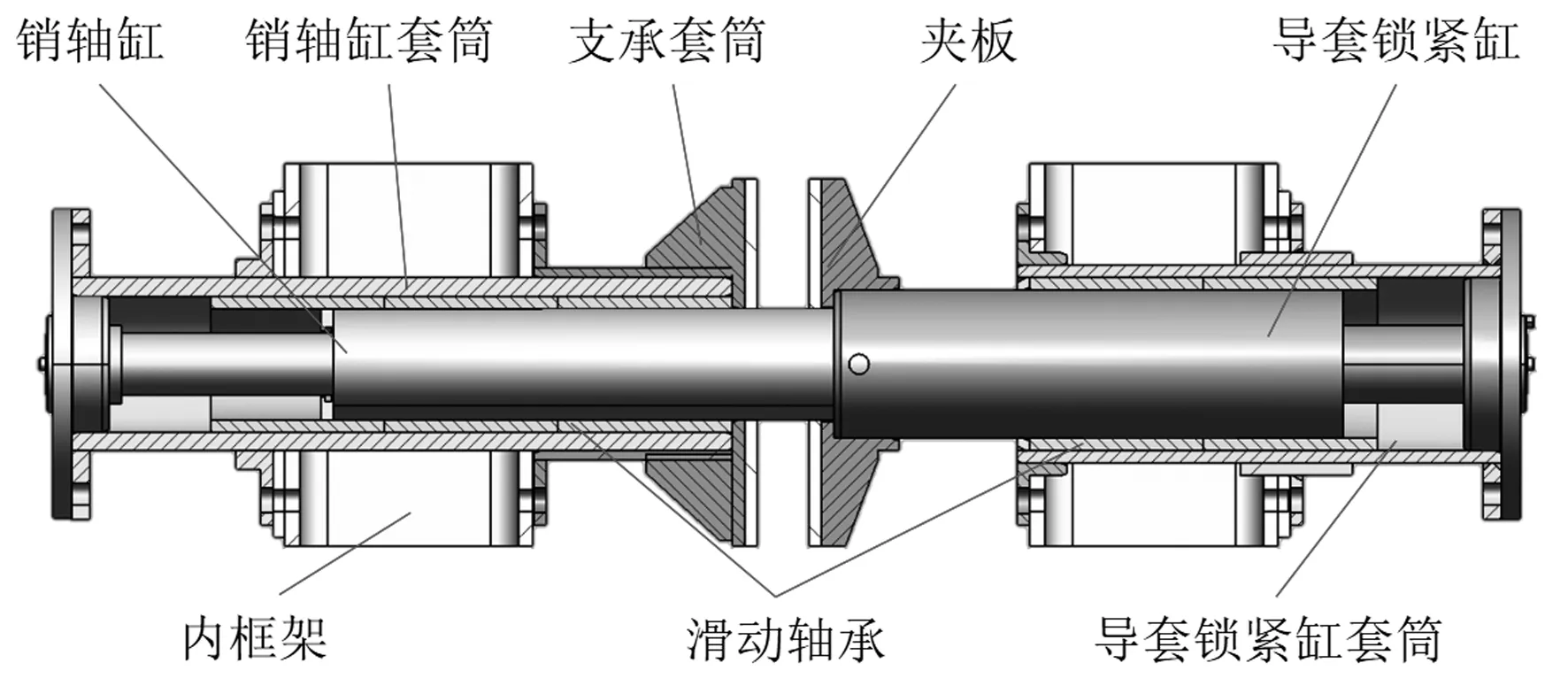
圖11 內框架與夾緊裝置安裝圖
3 懸架姿態調平策略分析
結合火箭發射平臺的調平策略,使用雙軸傾角傳感器檢測傾角,分析裝備姿態調平方法,為樣機的姿態調平提供理論指導意義。
3.1 研究對象
本裝備以步進式前行鋸切土體,鋸切時支撐懸架的支腿液壓缸與地面相接并保持水平狀態,正向驅動橫向進給系統,主機在懸架導軌上前行。為了防止裝備傾覆,需對支撐懸架進行姿態調平。
由于所切溝槽深達10 m,主機在鋸切過程當中,稍有偏斜情況發生,鏈鋸底端發生偏斜將被放大。當主機左右方向傾角僅0.2°時,鏈鋸底端出現偏載位移達70 mm,使鋸片受力不均,槽口偏斜,鋸片系統特別容易損壞。所以在鋸切進程中整個設備系統的姿態要求非常高,調平設備系統的姿態顯得尤為重要。
如圖12所示,支撐懸架系統機械結構主要由懸架、導軌、齒條、液壓支腿組成,懸架姿態調平系統由雙軸傾角傳感器、伺服系統等組成。伺服控制系統根據雙軸傾角傳感器的信號控制液壓支腿的伸縮,使整個支撐懸架系統在鋸切過程中始終處于水平或者接近水平狀態。
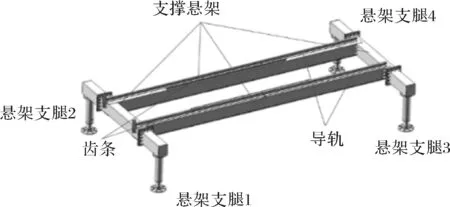
圖12 支撐懸架結構圖
3.2 建模及分析
以懸架的傾斜狀態來建立數學建模,并作出相應假設:
(1)液壓支腿通過一較大鋼板壓在地面上,地面為彈性體,在整個鋸切過程中由地面變形引起支腿下沉較短。
(2)整個設備主體為理想剛性模型,姿態調平過程中受重力和載荷作用而不發生形變或形變太小可以忽略不計。
(3)四個液壓支腿為理想剛性模型,姿態調平中不發生形變或可以忽略不計。
設備鋸切進程中的偏斜等效為繞x軸和y軸的旋轉,沒有繞z軸的旋轉運動和其他平移運動。
如圖13所示,將液壓支腿1的軸線同懸架上表面的交點記為O點,建立笛卡爾坐標系Oxyz,x軸平行于懸架長邊,y軸平行于懸架長邊。平面x2Oy2與地面平行,懸架坐標Ox0y0z0隨時變化。因懸架與地面不存在平動,故姿態調平可等價為將坐標系Ox0y0z0先后繞x旋轉了θ1角,然后又繞新坐標的y軸旋轉θ2角,到達Ox2y2z2的位置。
圖13中l1和l2分別為支腿2和支腿3同支腿1的距離,四條支腿在坐標系Ox0y0z0中的坐標分別為0P1(0,0,0)、0P2(0,l1,0)、0P3(l2,0,0)和0P4(l2,l2,0)。整個設備左右對稱,對稱平面同x2軸的距離為l1/2,移動主機的重心G(xs,xs,xs)沿著該對稱平面前行。
固接在支撐懸架上的傾角傳感器能實時測出支撐懸架的y軸與面x0Oy2的夾角為α,x軸與面x0Oy的夾角為β。通過該兩傾角可以推導出各支腿的調平行程,進而完成支撐懸架的姿態調平。
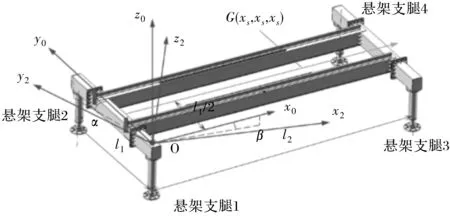
圖13 支撐懸架平臺模型
在空間幾何問題中,同一點同時處在不同的坐標系,其坐標值并不相同,但是相互之間可以通過數學關系進行轉換,矩陣通常可方便地描述這種變換關系。
姿態調平問題的核心即坐標系的轉換問題,以支撐懸架為對象,對該懸架的調平做理論分析。如圖14所示,設坐標系Ox0y0z0為三維笛卡爾坐標系,將該坐標系繞x0正向旋轉θ1角,得到新坐標系Ox1y1z1,兩坐標系的x0軸和x1軸相重合。旋轉過程遵循右手螺旋法則,即大拇指指向x0軸,順著四指彎曲方向旋轉為正,反方向為負。此時由坐標系Ox0y0z0到坐標系Ox1y1z1的變換矩陣為[13,14]
(1)
如圖15所示,將笛卡爾坐標系Ox1y1z1按右手螺旋法則繞y1軸正向旋轉θ2角,得到新坐標系Ox2y3z2,此時y1軸和y2軸重合,則由坐標系Ox1y1z1到坐標系Ox2y2z2的變換矩陣為
(2)

(3)
將式(1)和式(2)帶入式(3),得到
(4)
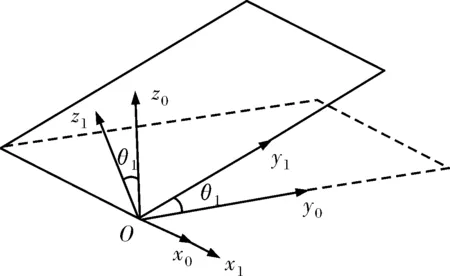
圖14 坐標系繞x0旋轉示意圖
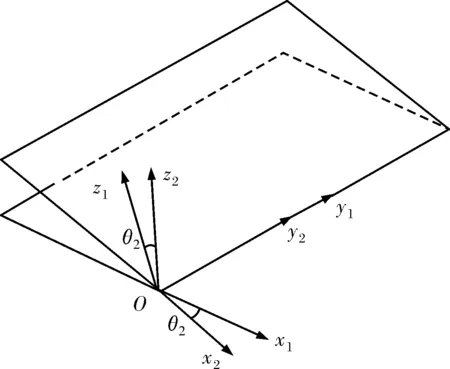
圖15 坐標系繞y1旋轉示意圖

(5)
(6)

(7)

圖16 空間向量與平面夾角關系示意圖

(8)
(9)
聯立式(8)和式 (9),得到轉角θ1和θ2的關于α角和β角的表達式為
(10)

(11)
四支腿在坐標系Ox0y0z0中(與懸架固連)的坐標分別為0P1(0,0,0)、0P2(0,l1,0)、0P3(l2,0,0)和0P4(l2,l1,0),則該四點在水平坐標系Ox2y2z2中(水平坐標系)坐標表示為2Pi(2Pix,2Piy,2Piz)。
(12)
得到個支腿在水平坐標系Ox2y2z0中z軸方向的坐標為
(13)
若液壓支腿縮回,則懸架會下降,因其大慣性質量會導致極大沖擊力,所以在懸架姿態調平過程中遵循“追逐最高點”法。此外,液壓伺服系統在工作時難免出現滯后性,且油缸縮回時的抖動影響調平的精度,這也決定了調平過程需遵循“追逐最高點”法[15],[16]。當傾角傳感器測出懸架平臺的兩軸關于水平面的夾角α和β角時,代入式(13)可得到最高支撐點,記最高點為Ph,各時刻四個支腿同最高點的位置誤差記為δi(i=1、2、3、4),δi=Ph-2Piz≥0。
(1)當α>0,≤>0時,液壓支腿4最高,Ph=2P4z=l1·sinα+l3·sinβ,各支腿誤差為
(14)
(2)當α>0,β<0時,則液壓支腿2最高,Ph=2P2z=l1·sinα,各支腿誤差為
(15)
(3)當α<0,β>0時,則液壓支腿3最高,Ph=2P3z=l2·sinβ,各支腿誤差為
(16)
(4)當α<0,β>0時,則液壓支腿1最高,Ph=2P1z=0,各支腿誤差為
(17)
根據四種懸架模型的相對水平面傾角的不同情況,結合“最高點追逐法”,能夠確定四支腿中以誰為基準,并直接把各支腿誤差作為輸入,控制四液壓支腿的伸長行程,實現懸架的姿態調平。
4 裝備制造及現場測試
4.1 裝備制造
地下深窄槽鋸切裝備滿足國家重型裝備設計要求,符合國家重型裝備設計規范,經理論分析,裝備的結構設計可行且合理,經過多輪專家評審后,對裝備進行加工制造。裝備加工制造主要分為主體框架制造、刀具制造以及外殼制造。
4.2 裝備切削試驗及分析
完成加工制造以及噴漆作業后,將裝備運輸至試驗場進行現場組裝與設備調試。啟動鏈鋸夾緊油缸,并借助吊車吊裝,完成鏈鋸的夾緊與鏈鋸銷孔定位,在夾緊油缸及升降油缸的共同作用下實現鏈鋸系統下行鋸切,調整切削馬達柱塞泵控制切削速度為0.3 m/s至0.6 m/s的速度區間。在鋸片下行切削至十米處啟動鏈鋸進給馬達,調整控制進給馬達的比例換向閥的開合設置進給速度為6 mm/s,實現鏈鋸橫向進給切削。
在預緊11 380 N緊鏈力情況下,鏈鋸底部張緊充足,未出現鏈節脫位的情況,且在鏈鋸下行切削過程中底部鏈節切削狀態良好,刀具未出現明顯傾覆且鏈鋸底部未見振動異響,驗證鏈鋸張緊力的可行性。
根據現場取樣刀具排屑以粘土為主并且刀具排屑情況良好,但是仍有少部分含水率過高的粘土在刀具上粘連。切削過程未見較大以及較堅硬巖石情況,鏈鋸切削至地下10 m處未出現卡刃現象,所排出切屑中僅存在少部分堅硬砂巖以及脆性軟巖,其尺寸在15~60 mm,僅有少部分樣品出現破碎斷面。試驗表明,在河南省平輿試驗場地質條件下,地下深窄槽裝備鋸切情況良好。
5 結束語
本文設計了一款開挖槽深大于10 m的地下深窄槽鋸切裝備,采用SolidWorks軟件建立模型,對深窄槽鋸切裝備進行設計。并依據所建立四足支撐缸懸架平臺,結合雙軸傾角傳感器所測傾角,確定“追逐最高點”的姿態調平策略,修正了實現姿態調平策略的算法,得到給定兩向傾角情況下每個支腿油缸應有的伸縮量,為樣機的姿態調平提供理論和現實意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
