彈載雙基前視成像雷達解析-迭代定位方法
2023-02-10 12:29:30詹珩藝李亞超武春風張廷豪
系統工程與電子技術 2023年1期
詹珩藝, 李亞超, 武春風, 宋 炫, 張廷豪
(1. 西安電子科技大學雷達信號處理國家重點實驗室, 陜西 西安 710071;2. 中國航天三江集團有限公司, 湖北 武漢 430040)
0 引 言
在彈載末制導或自主尋的等情況下,單基地合成孔徑雷達(synthetic aperture radar,SAR)無法獲取彈體前視圖像[1-3],為解決該問題,雙基前視SAR成像構型[4-6],通過合理的構型設計,可獲取前視二維高分辨圖像,為精確制導、靜默突防提供重要信息[7-11]。
在導彈末制導俯沖打擊目標時,SAR構型變化差異大,傳統彈載打擊方式單一靠慣導定位打擊,但慣導中的角度誤差和速度誤差的積累嚴重影響了打擊精度[12-15]。
所以彈載SAR系統在末制導階段常采用匹配制導[16-17]。彈載雙基前視SAR利用其特有構型,獲取正前方目標場景的高分辨圖像,通過圖像匹配算法,得到匹配點信息,利用該位置信息解算出導彈的實際位置,進一步修正慣導誤差和航跡偏差[18-19],保證了導彈對目標的精確打擊。
國內外許多學者針對單/雙基地雷達定位技術均展開了研究。在單基雷達中,文獻[20-21]提出基于距離-多普勒(range-Doppler,R-D)模型定位算法,通過迭代法求解多普勒方程、距離方程和地球方程實現對目標的定位,但該方法并未給出初始迭代點選取準則,若初始參數選取有誤,該方法將失效。文獻[22]提出利用圖像匹配算法獲得高精度匹配點位置信息,通過數字高程信息選取參考點,結合場景中心點建立歐拉四面體模型,直接解算出彈體實際位置。但是該方法定位精度與參考點選取有關,若參考點選取不合理將直接影響定位精度。文獻[23-24]通過求解基于單基SAR斜距非線性方程組,實現對目標或雷達的定位,但求解算法并未給出初始值選取準則,且算法性能很大程度上取決于初始值設置。
在雙基地雷達中:文獻[25]采用多個脈沖時延差實現定位,通過牛頓迭代法得到輻射源的具體位置,但該方法的定位精度受脈沖個數和脈沖持續時間的影響較大。文獻[26]針對雙基前視高機動SAR構型,建立R-D方程組,通過迭代法求解,該方法的定位精度與單基地雷達相同,受初始迭代點、慣導數據中的角度信息和速度信息的影響較大。文獻[27-28]在R-D模型的基礎上,通過鄰近像素迭代法獲取其他目標位置信息,但該方法只適用于雙基SAR移不變模式下的目標定位。文獻[29]利用雙基SAR收發平臺幾何關系和距離歷程,得到接收雷達和目標點的相對位置關系,但是該方法的定位精度受慣導數據中角度信息的影響較大。
針對上述問題,本文建立了基于圖像匹配的彈載雙基前視SAR定位模型,提出了最優解析-迭代定位方法。首先,通過雙基前視SAR成像算法獲取導引頭正前方目標的信息。然后,采用圖像匹配技術將彈載雙基前視SAR圖像與SAR基準圖進行圖像匹配,得到匹配點在彈載雙基前視SAR圖像中的位置。接著,本文的定位模型是通過彈載雙基SAR圖像中匹配點的位置所占距離單元的總數與波門采樣前沿距離確定的,該距離保證了定位模型的定位精度。最后,通過理論分析直接推導出定位模型的解析解集,并給出最優解析解的選取準則,將該解析解作為初始迭代點,通過迭代搜索得到導彈的最優坐標。該方法解決了傳統基于牛頓迭代法解算R-D模型對初始迭代點選取要求嚴苛,易陷入局部最優解的問題。同時,又解決了慣導中角度誤差和速度誤差的積累嚴重影響了打擊精度的問題。
1 彈載雙基前視SAR定位構型
以場景中任一點O為坐標原點,建立彈載雙基前視SAR定位構型,如圖1所示。
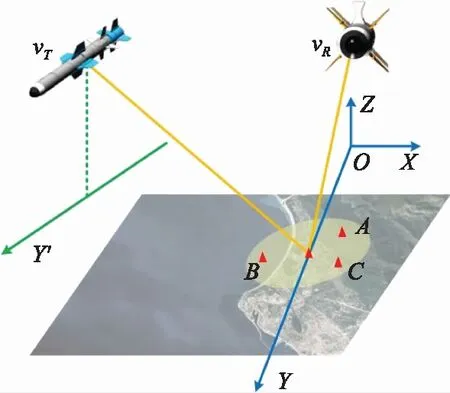
圖1 彈載雙基前視SAR構型Fig.1 Missile-borne bistatic forward-looking SAR configuration
(1)
2 彈載雙基前視SAR定位原理
2.1 定位模型
文獻[23-24]提供了一種基于斜距信息的單基SAR定位方法,本文將該斜距信息與彈載雙基前視SAR構型結合,建立彈載雙基前視SAR定位模型:
(2)
式中:Rbf0為波門采樣前沿距離;kA、kB、kC分別為匹配點;A、B、C到波門采樣前沿距離單元總數;c為光速;Fs為采樣頻率;Rr A、Rr B、Rr C、Rt A、Rt B、Rt C分別為收發雷達到匹配點A、B、C的距離;根據雙基前視SAR斜距歷程,該距離可以表示為
(3)
式中:(xA,yA,0)、(xB,yB,0)、(xC,yC,0)分別為場景中任意3個匹配點的位置坐標。通過求解式(2)和式(3),可以得到接收雷達的準確位置,進而修正接收雷達的軌道參數,實現導彈對目標的精確打擊。
2.2 解析-迭代定位方法
針對本文所提彈載雙基前視SAR定位模型,為獲取接收雷達的準確位置,提出一種最優解析-迭代定位方法。該方法通過理論分析直接得到該定位模型關于接收雷達位置坐標的解析解:
(4)
(5)
(6)
由式(4)~式(6)可知彈載雙基前視SAR定位模型有八組解析解,為獲取最優解析解,文獻[22]提出了一種通過慣導數據確定坐標大小的方法,本文將該方法與定位模型的解析解結合,提出一種新的適用于雙基前視SAR定位模型的最優接收雷達坐標的選取準則,如表1所示。
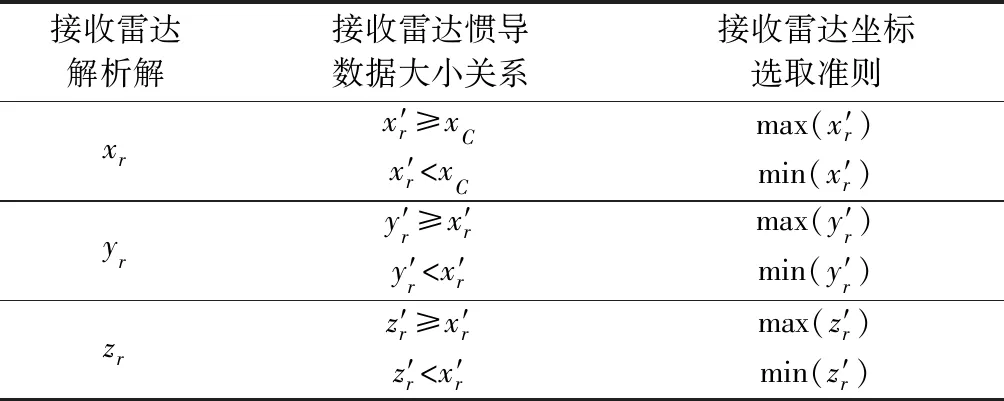
表1 接收雷達坐標的選取準則
通過表1的選取準則得到定位模型的最優解析解(xr,yr,zr),并將該解析解作為初始迭代點,通過迭代搜索得到接收雷達最優坐標。首先需要計算彈載雙基前視SAR定位矩陣和定位矩陣的雅可比矩陣。
將式(2)轉化為彈載雙基前視SAR定位矩陣:
(7)
(8)
結合式(7)和式(8),解析-迭代定位方法具體迭代步驟如下。
步驟 1將解析法解算出的接收雷達位置最優解析解(xr,yr,zr)作為迭代法的初始迭代點,初始迭代次數k=0。
步驟 2按照式(9),計算當前迭代時接收雷達的位置坐標(xr k,yr k,zr k),并用當前迭代的坐標值更新上次迭代的坐標值:
(9)
式中:k為當前迭代次數;(xr k1,yr k1,zr k1)為上次迭代k1時接收雷達的位置坐標;F(xr k1,yr k1,zr k1)為上次迭代k1時彈載雙基前視SAR定位矩陣F在(xr k1,yr k1,zr k1)處的值;J(xr k1,yr k1,zr k1)為上次迭代k1時雅可比矩陣J在(xr k1,yr k1,zr k1)處的值。
步驟 3計算當前迭代精度E:
E=max(|xr k-xr k1|,|yr k-yr k1|,|zr k-zr k1|)
(10)
步驟 4判斷E是否小于或等于迭代結束精度,若是,則執行步驟5;否則,將當前迭代次數加1后執行步驟2。
步驟 5將迭代得到的(xr k,yr k,zr k)作為接收雷達的近似最優坐標,完成對接收雷達的定位。
綜上所述,彈載雙基前視SAR幾何定位流程如圖2所示。
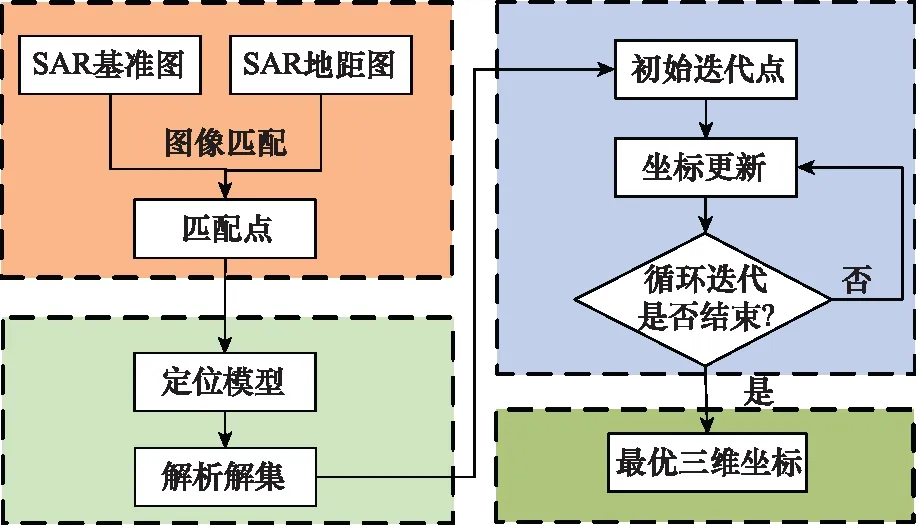
圖2 解析-迭代定位方法流程圖Fig.2 Flowchart of analysis-iterative positioning method
2.3 定位方法的計算量
快速修正彈體的位置在彈載末制導階段對目標的打擊至關重要。本文所提解析-迭代定位方法首先直接分析推導出定位模型的解析解集,該過程屬于常數操作。其次通過選取準則,確立最優初始迭代點,該過程也屬于常數操作。最后通過迭代搜索,獲取接收雷達最優三維坐標。所以本文所提定位方法的時間復雜度主要與迭代搜索的次數正相關。
根據以上分析,定量給出解析-迭代定位方法的單次浮點運算量:
O1≈[(2M(M-1))M+3M-1]N
(11)
式中:O1為解析-迭代定位方法的單次浮點運算量;M為彈載雙基前視SAR定位矩陣的階數;N為迭代搜索的次數。
3 定位誤差分析
以上分析均是在無誤差情況下得到的結論,而在導彈末制導階段,由于收發平臺的高機動性,彈載雙基前視SAR構型下發射雷達會偏離理想航線,從而對定位精度產生一定影響。此外,利用圖像匹配算法得到匹配點的位置坐標,匹配算法的性能影響匹配精度,從而直接決定定位精度。文獻[16]提供了一種運動誤差分析方法,本文將該方法與彈載雙基前視SAR定位模型結合,分析由運動誤差和匹配誤差對定位精度帶來的影響。
3.1 運動誤差
理想情況下,任意方位ta時刻,發射雷達位于(xt,yt,zt)。由于彈載平臺的高機動性產生的運動誤差,發射雷達偏離了理想航線(Δxt,Δyt,Δzt),故彈載雙基前視SAR斜距歷程更新為
(12)
其中:
(13)
對式(12)的斜距歷程分別關于Δxt、Δyt、Δzt求偏導可得由發射雷達位置偏差引起的雙基斜距歷程偏差,即若發射雷達偏離理想航線的差值越小,其引起的雙基斜距歷程的偏差越小,本文所提方法的定位精度越高。
(14)
式中:Rt 0A、Rt 0B、Rt 0C分別為合成孔徑中心時刻發射雷達到匹配點A、B、C的斜距歷程。
經過以上分析,由于發射雷達運動誤差的存在,導致彈載雙基前視SAR斜距歷程出現偏差,同理運動誤差也會導致角度信息出現偏差,進而影響接收雷達的定位精度。對于彈載雙基前視SAR平臺,收發平臺位置高,運動誤差產生的測角偏差對定位精度的影響,遠遠大于測距誤差對定位精度的影響。
3.2 匹配誤差
與運動誤差類似,圖像匹配誤差也是影響定位精度的重要因素,結合文獻[30]對匹配誤差對定位帶來的影響進行分析。匹配點在彈載雙基地距SAR圖像中存在x向和y向匹配誤差,假設在無匹配誤差的情況下匹配點位于(xA,yA,0),由于匹配誤差的存在,匹配點偏離了原來位置(ΔxA,ΔyA,0)。故此時雙基SAR斜距歷程更新為
(15)
為了更進一步分析匹配誤差對定位精度帶來的影響,針對每一個匹配點,對式(15)分別關于Δx和Δy求一階偏導可得
(16)
式中:Rr 0A、Rr 0B、Rr 0C分別為合成孔徑中心時刻接收雷達到匹配點A、B、C的雙基斜距歷程。由式(16)可知匹配點的位置偏差,與發射雷達的運動誤差相同,均會造成測距偏差,偏差越小,對定位精度的影響越小。
綜上,運動誤差和匹配誤差最終會產生測距誤差。傳統基于R-D模型定位方法的定位精度同樣會受運動誤差的影響,從而產生測距誤差、測角誤差等。對于彈載雙基前視SAR平臺,收發平臺位置高,由運動誤差產生小小的測角偏差對定位精度的影響,遠遠大于測距誤差對定位精度的影響。
4 仿真驗證
通過仿真實驗對本文所提定位方法進行驗證,并測試其定位精度。
4.1 運動誤差仿真分析
結合第3.1節彈載雙基前視SAR運動誤差分析,分別用文獻[29]中的基于R-D模型的定位方法和本文所提解析-迭代定位方法進行仿真實驗。在同樣仿真參數與試驗條件下,對測角誤差輸入量從0°增加到0.09°、測距誤差輸入量從0 m增加到9 m、運動誤差引起的測角誤差輸入量從0°增加到0.09° 3種情況分別進行仿真實驗,得到仿真結果如圖3和圖4所示。其中,Δx、Δy、Δz表示接收雷達三軸定位差。
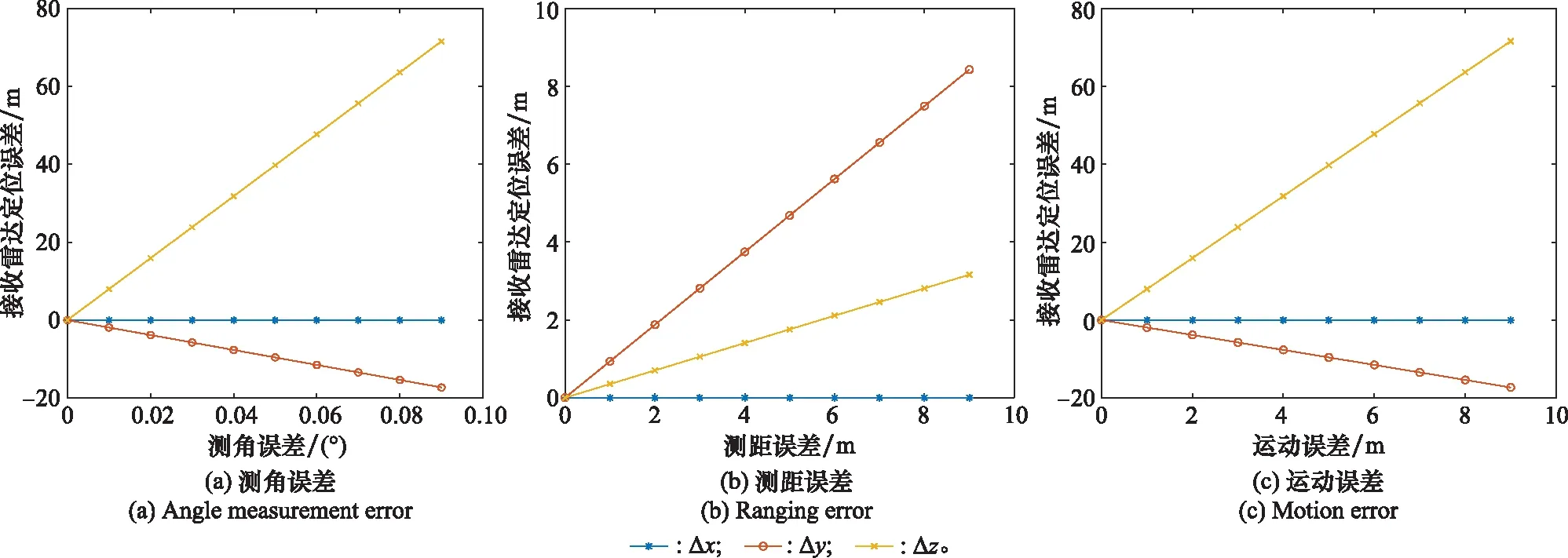
圖3 運動誤差對文獻[29]中定位方法定位精度的影響Fig.3 Influence of motion error on the positioning accuracy of the positioning method in [29]
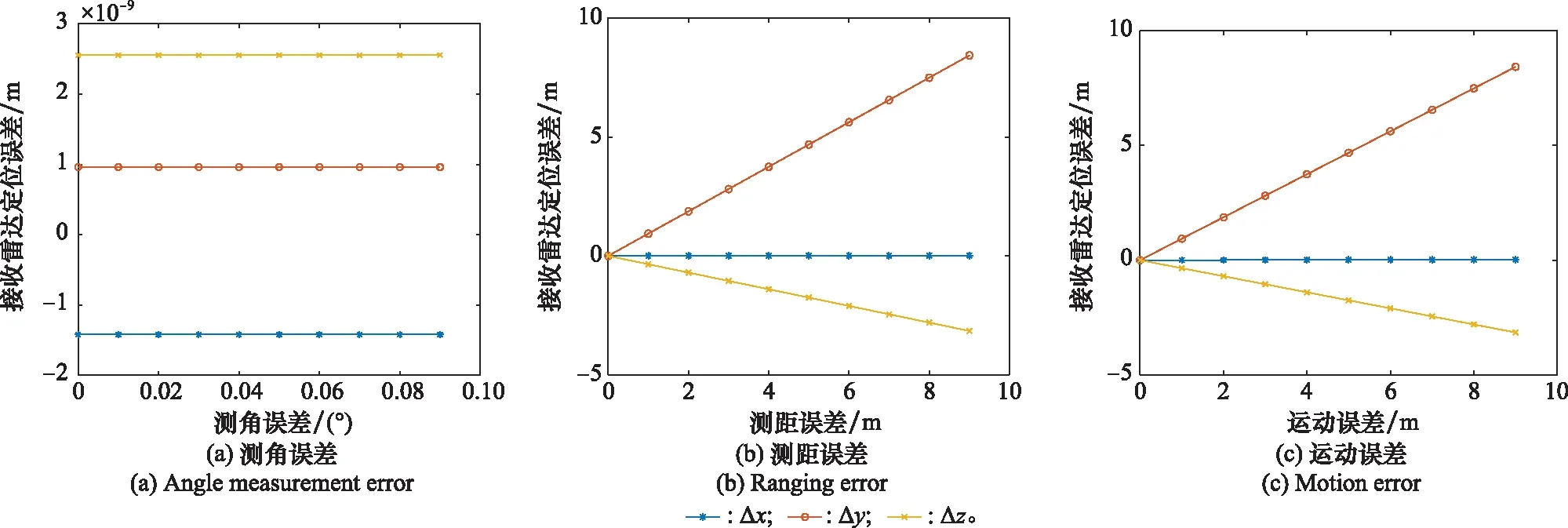
圖4 運動誤差對本文所提方法定位精度的影響Fig.4 Influence of motion error on the positioning accuracy of the proposed method
對比圖3和圖4,可以看出,測角誤差對文獻[29]定位方法的定位精度影響非常大,而對本文所提方法定位精度幾乎沒有影響;測距誤差對兩種方法的影響大致相同;運動誤差對傳統方法定位精度的影響為本文所提方法的8倍左右。綜上所述,本文所提定位方法相比于文獻[29]定位方法,對收發平臺的運動誤差具有一定的包容性。
4.2 匹配點對定位精度的影響仿真分析
為驗證匹配點的選取對本文所提定位方法的影響,在發射雷達和接收雷達波束中心照射區域產生服從均勻分布的3 000組隨機數,表示圖像匹配算法得到的匹配點坐標。在無誤差的情況下,針對隨機產生的匹配點,采用本文所提解析-迭代定位方法進行1 000次仿真實驗,仿真結果如圖5所示。從圖5中可以看出,在無誤差的情況下,本文所提解析-迭代定位方法對不同匹配點均可以實現零誤差定位。
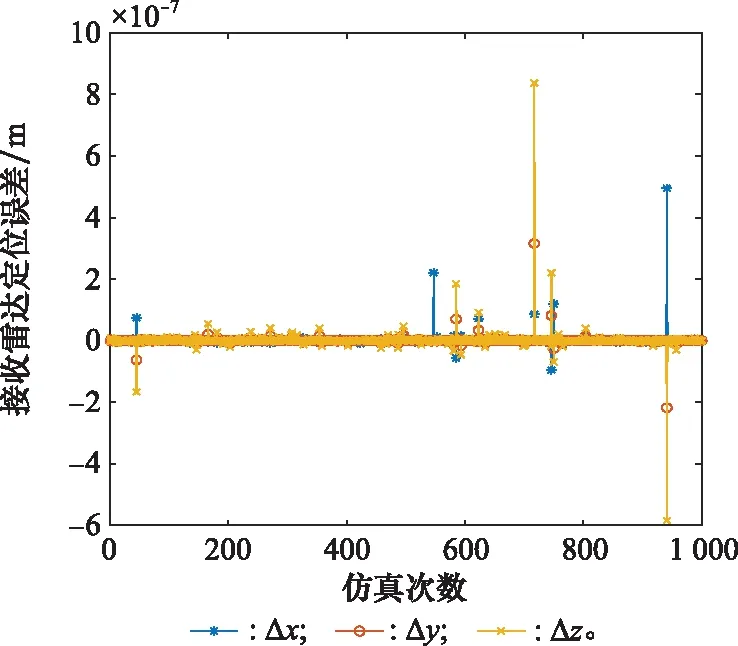
圖5 解析法定位精度Fig.5 Positioning accuracy of analytical method
4.3 匹配誤差仿真分析
考慮到彈載雙基前視SAR成像的真實環境,在0.05°測角誤差,5 m測距誤差,距離向分辨率和方位向分辨率均為3 m的前提下,設置5 m匹配誤差。任意選取彈載雙基前視SAR軌道參數中的五個接收雷達的位置坐標,在同樣實驗環境和條件下,利用文獻[29]中定位方法、本文所提定位模型的最優解析解和本文所提解析-迭代定位方法進行仿真實驗。仿真實驗結果如圖6~圖8所示。
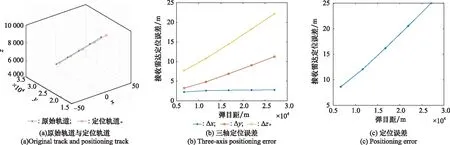
圖6 文獻[29]中定位方法的定位誤差Fig.6 Positioning error of the positioning method in [29]

圖7 解析法定位誤差Fig.7 Positioning error of analytical method
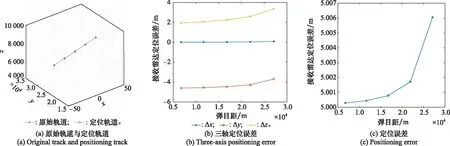
圖8 解析-迭代定位誤差Fig.8 Positioning error of analysis-iterative method
對比圖6~圖8可得到以下結論。
(1) 在存在匹配誤差和運動誤差的前提下,文獻[29]所提定位方法和本文得到的最優解析解的定位精度受彈目距影響較大,而本文所提解析-迭代定位方法的定位精度幾乎不受彈目距的影響,且定位精度遠遠優于文獻[29]所提定位方法。
(2) 在同樣實驗環境和條件下,文獻[29]定位方法、本文得到的最優解析解、本文所提解析-迭代定位方法的最大定位誤差分別約為測距誤差和匹配誤差的5倍、3倍和1倍,本文所提解析-迭代定位方法的定位精度提升了5倍。
4.4 定位方法計算量仿真分析
結合本文第2.3節的分析和推導出的解析-迭代定位方法的單次浮點運算量,在第4.3節仿真的基礎上,同樣實驗環境和條件下,采用本文所提解析-迭代定位方法和文獻[26-28]所提迭代步驟求解本文所提的彈載雙基前視SAR定位模型,對不同彈目距、相同運動誤差、相同匹配誤差的情況,進行迭代搜索次數、單次浮點運算量和運行時間的仿真實驗。文獻[26-28]所提迭代步驟中,迭代初始點通過服從均勻分布的隨機數確定。仿真所得結果如圖9所示。
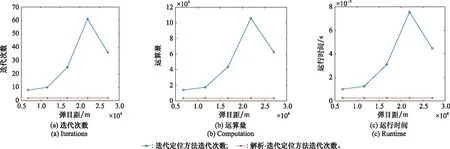
圖9 定位方法計算量Fig.9 Calculation of location method
圖9(a)為迭代定位方法的迭代次數,從中可以看出,采用文獻[26-28]所提迭代步驟求解本文定位模型,由于該文獻中并未給出初始迭代點的選取準則,本文采用服從均勻分布的隨機數作為迭代搜索的初始點,所以該方法迭代次數不穩定,最大可達到61次。另外,當初始迭代點選取不準確時,該方法可能不收斂,導致定位方法失效。而本文所提解析-迭代定位方法的迭代次數穩定,兩次迭代即可達到收斂。
圖9(b)為迭代定位方法的單次浮點運算量,從中可以看出本文所提解析-迭代定位方法的運算量在不同彈目距下穩定,且遠遠小于文獻[26-28]所提迭代步驟的迭代定位方法。
圖9(c)為在處理器TMS320C6678,內核工作主頻為1.4 GHz時,兩種定位方法的運行時間。從中可以看出文獻[26-28]所提迭代步驟的迭代定位方法的運行時間最大可達76 μs,而本文所提解析-迭代定位方法的運行時間均為2 ms,運行時間提升了38倍。
綜合圖9可知,迭代定位方法的運算量和運行時間與迭代搜索的次數成正相關。本文所提解析-迭代定位方法的運行時間遠小于文獻[26-28]所提迭代步驟的迭代定位方法的運行時間,可以在彈載平臺上快速實現。
5 結 論
快速精準的彈體定位是彈載尋的制導階段的重要保障,為了解決傳統雙基定位方法受限于速度、角度等參數精度的問題,本文建立了基于圖像匹配的彈載雙基前視成像定位模型,推導了定位模型的解析解集,制定了解析解的選取準則,確立了最優初始迭代點,實現了快速迭代搜索,獲取了接收雷達最優三維坐標,完成了彈體的精確定位,提高了導彈在末制導階段的作戰效能。仿真實驗驗證了在相同實驗環境和條件下,最優解析-迭代定位方法的有效性和準確性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56