基于IUPF算法的三維無人機毫米波波束跟蹤
2023-02-11 12:29:38張俊杰仲偉志張璐璐王俊智朱秋明
系統(tǒng)工程與電子技術(shù) 2023年1期
張俊杰, 仲偉志,*, 張璐璐, 王俊智, 朱秋明
(1. 南京航空航天大學航天學院, 江蘇 南京 211106;2. 南京航空航天大學電子與信息工程學院, 江蘇 南京 211106)
0 引 言
近年來,無人機憑借其優(yōu)良的機動性、經(jīng)濟性及靈活性,在天氣監(jiān)測、自然災(zāi)害監(jiān)測、交通控制、貨物運輸、應(yīng)急搜救、通信中繼等方面具有巨大的應(yīng)用前景[1-5]。然而,傳統(tǒng)無線通信系統(tǒng)所使用的6 GHz以下微波頻段無法滿足眾多新興應(yīng)用領(lǐng)域的通信容量需求[6]。毫米波因擁有大量尚未利用的頻帶資源而受到人們廣泛關(guān)注,可以為無人機通信網(wǎng)絡(luò)提供豐富的頻譜資源,以支持其實現(xiàn)高速數(shù)據(jù)傳輸[6-10]。但毫米波的頻段較高,波長較短,因此易導(dǎo)致較大的路徑損耗,尤其在雨、雪等天氣下會產(chǎn)生極大衰減[11]。針對這一問題,研究者提出采用大規(guī)模陣列天線下的波束賦形技術(shù)來彌補毫米波的路徑損耗[4, 12-13]。然而,無人機的姿態(tài)變化、飛行軌跡變化等都可能導(dǎo)致波束失配,嚴重影響通信質(zhì)量[14-15]。因此,需要采用有效的波束跟蹤來確保通信質(zhì)量[16-19]。
目前,針對毫米波波束跟蹤的相關(guān)研究有很多。在靜態(tài)場景下,文獻[20]提出一種新穎的輔助波束對(auxiliary beam pair,ABP)方法來獲得發(fā)射角(angle-of-departure,AoD)和到達角(angle-of-arrival,AoA)的準確估計,但該估計算法需要對信道進行全方位掃描。文獻[18, 21-23]提出了一類基于擴展卡爾曼濾波(extented Kalman filter,EKF)的波束跟蹤方法,有效地提高了角度跟蹤的精度,但該類方法是通過對非線性函數(shù)方程進行近似線性化處理,得到一個線性化模型來實現(xiàn)角度估計的,在一些高度非線性的情況下可能會導(dǎo)致濾波器發(fā)散,影響跟蹤精度。文獻[24-25]提出了一類基于無跡卡爾曼濾波(unscented Kalman filter,UKF)的波束跟蹤方法,該類方法通過一個高斯分布對非線性方程的概率密度進行近似,從而能夠有效地解決EKF跟蹤方法遇到的問題,但如果系統(tǒng)是非高斯環(huán)境,該方法極易產(chǎn)生較大的誤差。文獻[26]提出一種基于粒子濾波(partical filter,PF)的二維跟蹤算法,通過尋找一組在狀態(tài)空間中傳播的隨機樣本來近似表示概率密度函數(shù),用樣本均值代替積分運算,獲得系統(tǒng)狀態(tài)的最小方差估計,該方法能有效地解決UKF跟蹤算法遇到的問題,但該方法存在粒子退化問題,會導(dǎo)致波束跟蹤性能下降。
針對上述問題,本文提出一種基于改進無跡卡爾曼PF(improved unscented Kalman particle filter, IUPF)算法的無人機三維毫米波波束跟蹤方法。該方法在三維毫米波波束跟蹤模型驅(qū)動下,利用IUPF算法,在有效解決粒子退化問題的同時,進一步優(yōu)化了粒子權(quán)重,從而提高了波束跟蹤精度,實現(xiàn)了無人機三維環(huán)境下的波束精確跟蹤。
1 系統(tǒng)模型
1.1 三維傳播模型
本文假設(shè)了一個支持無人機的毫米波通信系統(tǒng),該系統(tǒng)由無人機基站和地面用戶組成。在下行鏈路中,無人機作為發(fā)射端,地面用戶作為接收端。在接收端和發(fā)射端分別配備一個具有Mr×Nr和Mt×Nt根天線的均勻平面陣(uniform planar array, UPA),陣列天線間距為載波波長的一半。無人機三維通信系統(tǒng)模型如圖1所示,假設(shè)陣列為設(shè)置在x-y平面內(nèi)的UPA,其中φ和θ分別表示水平域和垂直域的相位。
假設(shè)信道為時變信道,收發(fā)兩端均采用混合波束成形系統(tǒng),且只有一個射頻鏈,在k時刻由Lk條路徑組成的信道模型[27-28]可表示為
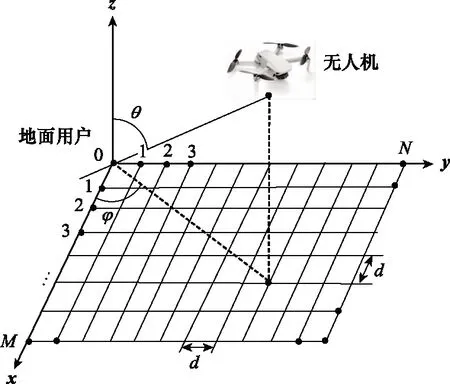
圖1 無人機三維通信模型Fig.1 Unmanned aerial vehicle three-dimensional communication model
(1)
a(φ,θ)=aa(φ,θ)?ae(φ,θ)
(2)
其中
(3)
式中:ξ=sinφsinθ;τ=sinφcosθ;?是克羅內(nèi)克積;λ是載波波長;d是陣元間距。
當發(fā)射端采用波束成形向量fk,接收端采用波束合并向量wk時,地面用戶第k個時刻的接收信號可表示為
(4)
式中:vk為第k個時刻均值為0的加性高斯白噪聲。
由于毫米波信道的主要能量集中在視距路徑(line-of-sight,LOS)[29-30],因此接收信號可簡化為
(5)
其中,波束成形向量fk和波束合并向量wk可分別表示為
(6)
(7)
1.2 空間狀態(tài)模型
根據(jù)上述無人機毫米波信道模型,建立空間狀態(tài)向量Xk:
(8)
AoA和AoD的狀態(tài)更新方程由高斯過程噪聲驅(qū)動,可表示為
Xk=Xk-1+nk
(9)

1.3 無人機飛行模型
本文引入笛卡爾坐標系來描述無人機的物體狀態(tài)和行為參數(shù)。首先,建立如圖1所示的坐標系,則無人機在t時刻的坐標則可用[X(t),Y(t),Z(t)]表示,無人機與Z軸之間的距離可表示為
(10)
無人機與地面用戶之間的距離可表示為
(11)
則接收端ZOA和EOA可分別表示為
(12)
(13)
其在一個時隙內(nèi)的變化量可分別表示為
Δφ=φ(t+1)-φ(t)
(14)
Δθ=θ(t+1)-θ(t)
(15)
2 基于IUPF的波束跟蹤算法
在上述無人機毫米波信道模型以及所建立的空間狀態(tài)模型基礎(chǔ)上,本文提出一種基于IUPF的三維波束跟蹤算法,如圖2所示。
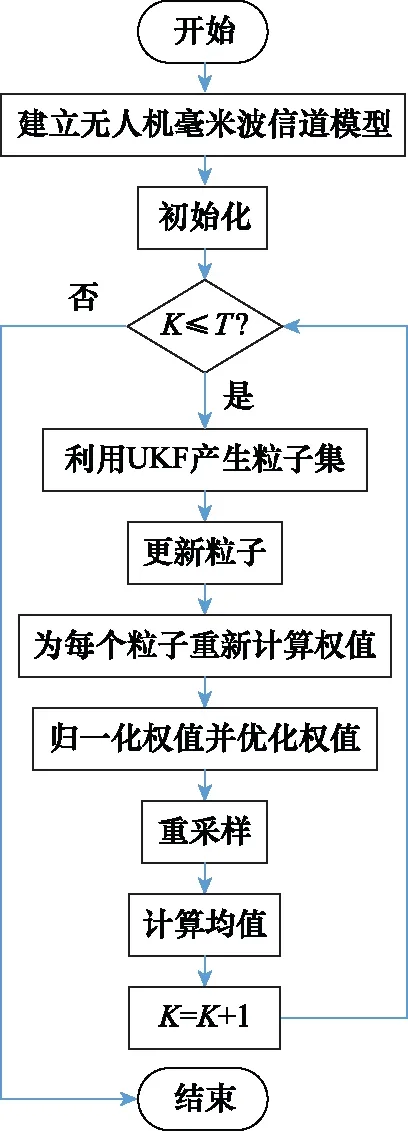
圖2 三維IUPF波束跟蹤算法流程圖Fig.2 Folw chart of three-dimensional IUPF beam tracking algorithm
以往參考文獻中的基本PF跟蹤算法中涉及的PF是分析非線性動態(tài)系統(tǒng)的有效方法,其估計精度可以近似最優(yōu)。但是,PF算法中粒子權(quán)值的方差會隨著時間迭代而不斷增加,這會導(dǎo)致粒子的退化問題,進而造成計算資源浪費以及估計結(jié)果不準確。而無人機場景下的姿態(tài)變化、快速運動等因素會加重這一粒子退化問題。目前,可以采取3種方法來解決粒子退化問題:增加粒子數(shù)、重采樣技術(shù)以及選擇合理的建議密度[29]。增加粒子數(shù)目會顯著增加算法的運行時間,因此本文采用將重采樣技術(shù)與選擇合理的建議密度相結(jié)合的IUPF算法,該算法通過利用UKF建立建議密度分布函數(shù),對粒子的權(quán)重進行優(yōu)化,從而有效地解決了粒子退化問題,進而提高了波束跟蹤精度。
2.1 利用UKF建立建議密度分布函數(shù)
IUPF算法中的建議密度函數(shù)能夠使采樣的粒子最大程度地符合先驗分布,提高粒子的有效性,使粒子在多次迭代后仍然能夠具有良好的權(quán)值,從而有效地減少無人機毫米波系統(tǒng)計算資源的浪費。

(16)

獲得Sigma點集后,計算點集中相應(yīng)點的權(quán)重:
(17)

(18)
(19)
(20)
式中:[·]T表示矩陣或向量的轉(zhuǎn)置。
(21)
(22)
(23)
(24)
式中:R是觀測噪聲,主要由信噪比(signal to noise ratio,SNR)決定。
計算卡爾曼增益:
(25)
(26)
(27)

2.2 優(yōu)化粒子權(quán)重
傳統(tǒng)的重采樣過程有效抑制了粒子退化,可以解決粒子權(quán)重偏差過大的問題,從而一定程度上提高了跟蹤角度精度。然而,傳統(tǒng)的重采樣方法在簡單重復(fù)復(fù)制大權(quán)值粒子的同時丟棄小權(quán)值粒子,導(dǎo)致了粒子多樣性的缺乏,進而影響了濾波結(jié)果的正確性,使波束對準精度下降。針對上述問題,本文采用了一種權(quán)重優(yōu)化的方法,調(diào)整歸一化粒子的權(quán)重,增加小權(quán)值粒子的權(quán)重比例,降低大權(quán)值粒子的權(quán)重比例,從而增加粒子的多樣性。本文采用的權(quán)重優(yōu)化方法在具體實施過程中需要引入一個影響因子,將其加入歸一化的權(quán)重中。調(diào)整粒子權(quán)重,有效地提高了粒子的多樣性,從而提高了角度跟蹤精度。
(28)
而后,計算每個粒子的權(quán)值:
(29)
再引入權(quán)重影響因子α,求得歸一化粒子權(quán)重:
(30)
式中:0<α<1;N表示粒子數(shù)目。
(31)
最后根據(jù)式(31)進行狀態(tài)估計:
(32)
Xk即是發(fā)射端波束形成器和接收端波束合成器的當前信道角度矢量的最終估計。此外,無人機毫米波網(wǎng)絡(luò)重復(fù)了第2.1和第2.2節(jié)描述的波束跟蹤過程,并隨時間更新每個時刻經(jīng)過濾波的AoA和AoD。
3 仿真實驗
為了驗證基于IUPF的三維波束跟蹤算法的性能,本文分別從權(quán)重影響因子α、SNR、陣列尺寸、角度方差等方面對算法進行仿真計算,并與基于EKF和UKF的三維波束跟蹤方法進行對比。仿真中無人機的初始位置為(100,200,100)m,假設(shè)在X,Y,Z3個方向的初始速度分別為10 m/s,10 m/s,5 m/s,在X和Y方向上的加速度分別為2 m/s2,3 m/s2,Z方向上加速度為0[31]。由此可以計算出每個時隙內(nèi),由于無人機的軌跡變化帶來的EOD,AOD的變化量。經(jīng)仿真計算,最大變化量不超過0.15°。但是無人機在實際飛行過程中,由于外界因素以及自身的一些抖動會導(dǎo)致該角度的變化量增大。因此,本文仿真過程中將角度的變化方差設(shè)定為(0.5°)2。
假設(shè)波束的初始狀態(tài)已知,為了實現(xiàn)無縫跟蹤,本文假設(shè)通信路徑中沒有阻塞。每次仿真包含100個時隙,并在參數(shù)相同的情況下進行1 000次仿真,仿真參數(shù)設(shè)置如表1所示。
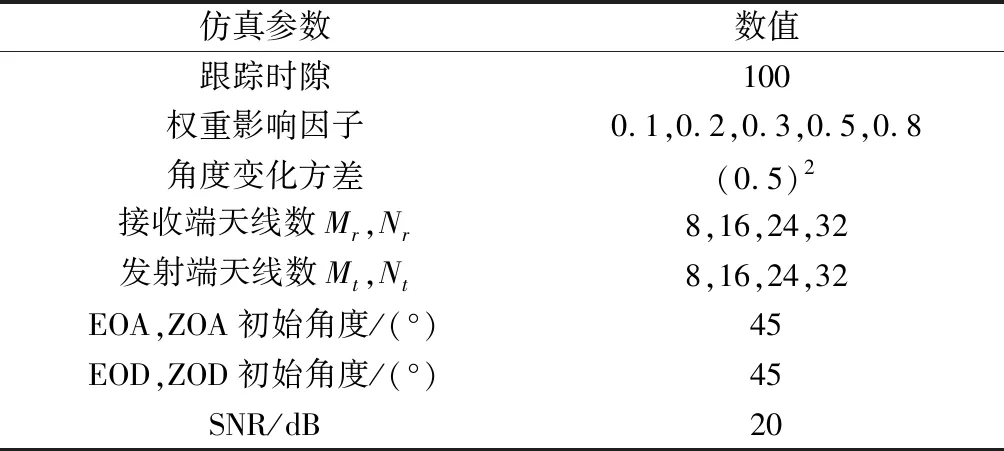
表1 仿真參數(shù)
3.1 權(quán)重影響因子
本節(jié)討論權(quán)重影響因子α對IUPF波束跟蹤算法的影響,仿真參數(shù)設(shè)置如表1所示。三維跟蹤算法涉及4個角度的跟蹤,由于4個角度的變化情況相似,因此此處只以EOA的變化情況為例。圖3顯示了權(quán)重影響因子α=0.1,0.2,0.3,0.5,0.8下,跟蹤角度的均方誤差(mean square error, MSE)隨時間的變化情況。
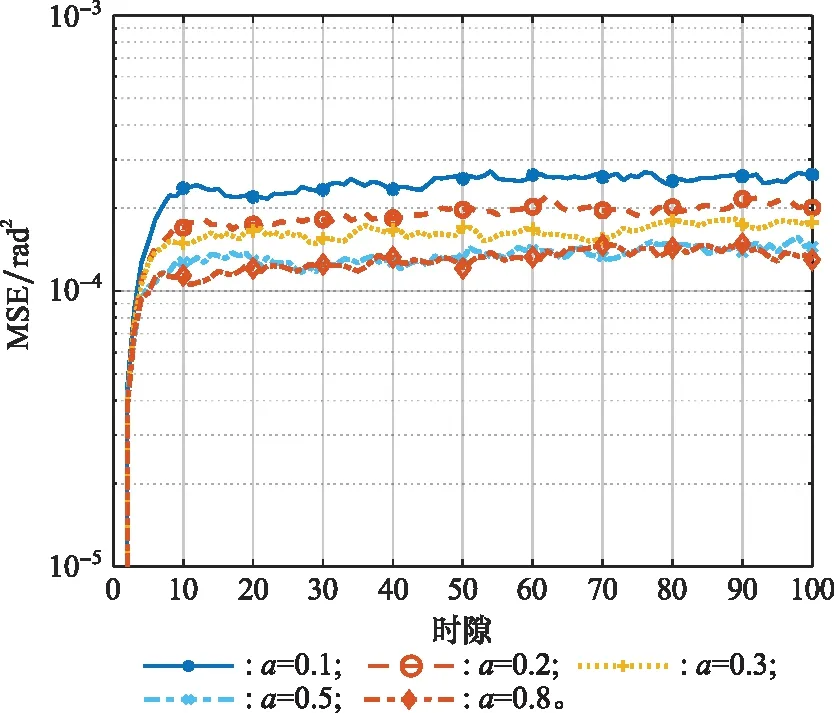
圖3 不同權(quán)重影響因子下EOA的跟蹤MSEFig.3 Tracking MSE of EOA with different weight impact factors
如圖3所示,α=0.8時IUPF的MSE最小,即此時跟蹤性能最優(yōu),濾波后的角度與真實的角度最相近。權(quán)重因子α的取值不能過小,因為如果α的取值過小,會使原本權(quán)重大的粒子權(quán)重變得過小,使原本權(quán)重小的粒子權(quán)重過大,這會使權(quán)值優(yōu)化后的粒子權(quán)重與真實粒子有較大的偏差,導(dǎo)致角度跟蹤的誤差增大。但權(quán)重因子α的取值也不能過大,α過大會導(dǎo)致原本權(quán)重大的粒子經(jīng)過權(quán)重優(yōu)化之后權(quán)重依舊大,權(quán)重小的粒子權(quán)重依舊小,從而失去了權(quán)重優(yōu)化的意義。本節(jié)中α=0.8是在本仿真條件下取得的較優(yōu)結(jié)果,下面的幾個仿真都在此權(quán)重因子下進行。
3.2 信噪比
SNR對IUPF跟蹤算法的影響如圖4所示。SNR分別設(shè)置為5 dB、10 dB、20 dB,其他仿真參數(shù)設(shè)置如表1所示。如圖4所示,MSE隨著SNR的增大而減小。
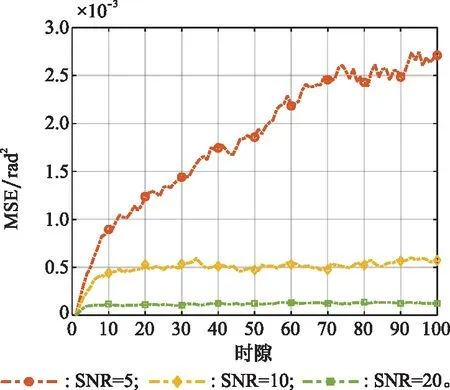
圖4 不同SNR下EOA的MSEFig.4 MSE of EOA with different SNR
3.3 陣列尺寸
陣列尺寸大小對IUPF跟蹤算法的影響如圖5所示。發(fā)射端和接收端的陣列尺寸相同,大小分別為8×8,16×16,24×24,32×32四種情況,其他仿真參數(shù)如表1所示。
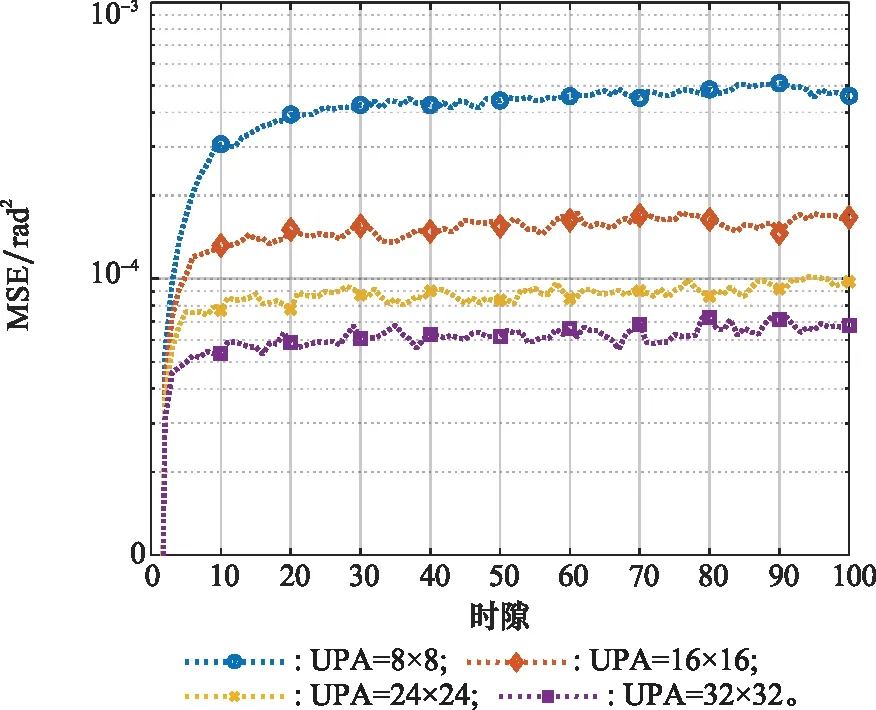
圖5 不同陣列尺寸下EOA的MSEFig.5 MSE of EOA with different array sizes
如圖5所示,MSE隨著天線數(shù)量的增大而減小。這證明了算法對波束寬度的適應(yīng)性較好。
3.4 角度方差
角度方差對IUPF跟蹤算法性能的影響如圖6所示。仿真參數(shù)設(shè)置如表1所示,圖6顯示了角度變化方差分別在(0.5π/180)2、(0.75π/180)2以及(π/180)2下EOA的MSE隨時間的變化情況,角度方差為(0.5π/180)2時,MSE最小,這代表通信鏈路收發(fā)兩端的角度在單位時間內(nèi)的變化越小,跟蹤精度越高。
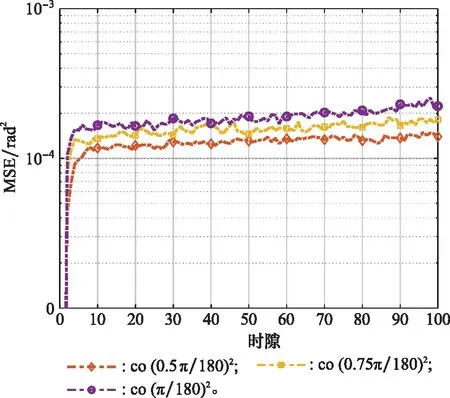
圖6 不同角度方差下EOA的MSEFig.6 MSE of EOA with different angle variances
3.5 跟蹤角度與真實角度對比
本節(jié)討論當EOA和ZOA初始角度大小不一致時,經(jīng)過IUPF濾波后的角度與實際真實的角度之間的差異。EOA和EOD的初始值為45°,ZOA和ZOD的初始值為20°,其他仿真參數(shù)如表1所示。
圖7和圖8顯示了EOA和ZOA的跟蹤角度與真實角度基本吻合。說明了在此條件下,本文算法的精度很高,與實際情況之間的誤差很小。
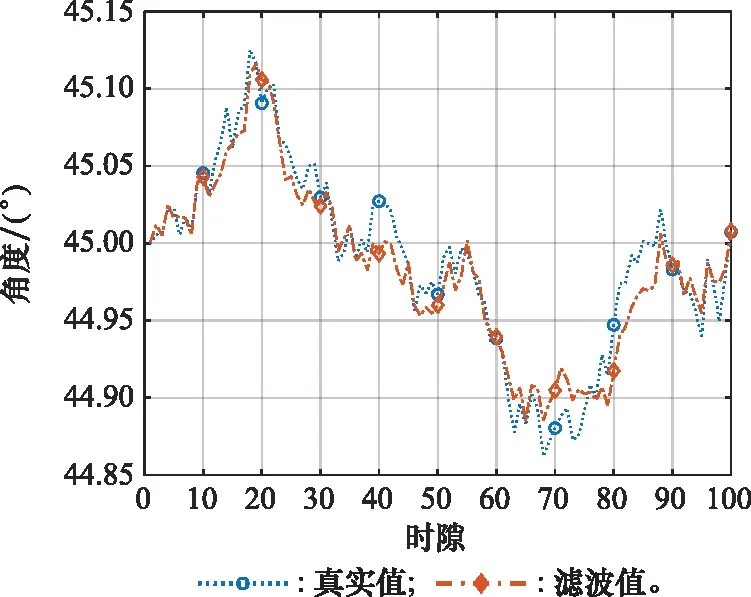
圖7 EOA濾波角度與真實角度對比圖Fig.7 Comparison of EOA filtered angle and real angle
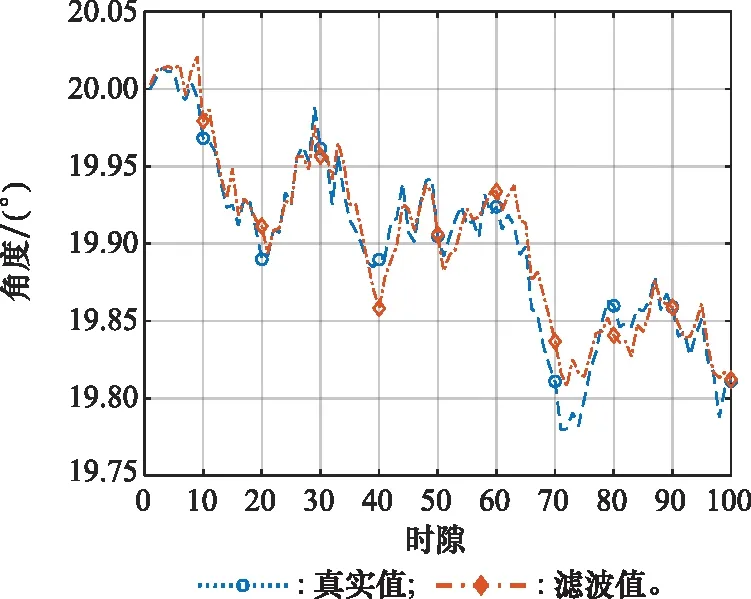
圖8 ZOA濾波角度與真實角度對比圖Fig.8 Comparison of ZOA filtered angle and real angle
3.6 不同跟蹤算法之間的跟蹤性能對比
基于IUPF的三維波束跟蹤與傳統(tǒng)的基于EKF、UKF算法的波束跟蹤性能對比如圖9所示,仿真參數(shù)如表1所示。仿真結(jié)果表明,基于IUPF的波束跟蹤方法獲得的MSE要明顯小于基于EKF和UKF算法的波束跟蹤方法,這是由于EKF是利用對非線性情況進行泰勒一階展開而得到的一個線性化模型來進行狀態(tài)估計的,在一些高度非線性的情況下會大大影響波束跟蹤的精度。UKF是用UT變換得到的確定數(shù)量的Sigma點集來近似非線性系統(tǒng)的,其估計精度高于EKF。IUPF算法是利用一些離散隨機采樣點來近似系統(tǒng)隨機變量的概率密度函數(shù),以均值計算代替積分運算,且考慮了系統(tǒng)最新的觀測信息,因此較其他算法具有更高的估計精度。
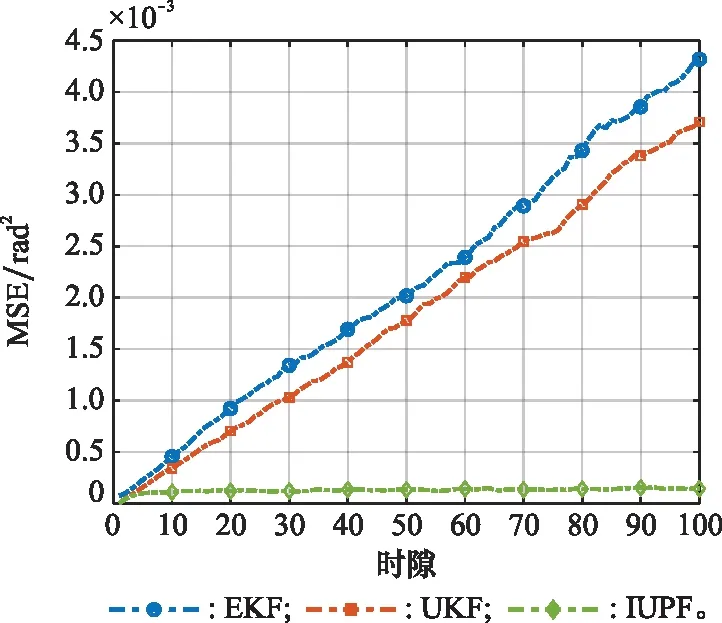
圖9 EKF,UKF,IUPF算法下EOA的MSEFig.9 MSE of EOA with EKF, UKF, IUPF algorithm
4 結(jié) 論
本文提出了一種基于IUPF的三維無人機毫米波波束跟蹤方法。該方法在無人機毫米波信道模型基礎(chǔ)上,利用IUPF對發(fā)射端和接收端的角度進行估計,從而實現(xiàn)精確的波束跟蹤。仿真結(jié)果表明,相較于基于EKF和UKF的波束跟蹤方法,IUPF算法能夠有效地減小角度跟蹤的均方誤差,提高角度跟蹤的精度。但該方法的運算復(fù)雜度相對較高,在未來的工作中將著力降低算法的復(fù)雜度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56