液體火箭發動機智能故障診斷的研究現狀*
2023-03-13 02:48:12胡海峰
航天控制 2023年1期
胡海峰
1.北京航天自動控制研究所,北京 100854 2.航天智能控制國家重點實驗室,北京 100854
0 引言
液體火箭發動機工作在惡劣物理條件下,作為火箭的動力核心,運行過程中一旦發生故障,會造成巨大災難[1,2]。自1967年1月阿波羅4A號發生嚴重事故、到2006年為止,在美國等國家進行的共249次載人航天發射飛行中,出現故障166起[3],其中動力系統故障占航天系統總故障的60%以上[4]。因此,及時準確發現發動機運行過程中的異常,對于及時補救和完善操作規程[5]、進行飛行控制重構,以盡可能挽救任務具有重要意義[6-7]。
液體火箭發動機的結構極其復雜,是包含多個樹形分支子系統的復雜系統,可分為管路系統、渦輪泵系統以及推力室系統,每個系統又由多個部件耦合連接[8-9]。當故障發生時,環境干擾及故障多樣性、故障信息耦合的復雜性,給液體火箭發動機故障診斷及預測帶來了極大挑戰[5,8]。
液體火箭發動機的健康監控包括故障檢測、故障診斷和故障控制等。故障檢測是利用各類傳感器測量和提取得到的發動機運行過程數據,對發動機的工作狀態有無異常做出可靠判斷;故障診斷是根據經驗和推測所獲得的異常狀態信息,對發生故障的類型、程度和部位進行分類診斷,從而確定故障時間、估計故障程度并實現故障模式的分離[4]。已有文獻[10]對故障檢測和監控進行了詳細的綜述。近年來基于人工智能的液體火箭發動機得到了應用和廣泛重視[4]。
本文目的是匯總分析故障模式及監控信號,總結分析液體火箭發動機故障診斷研究的進展。
1 液體火箭發動機的故障模式研究
液體火箭發動機發生故障的機理復雜,包括單一機理和耦合機理。文獻[5]基于泵壓式液體火箭發動機的故障統計數據和故障事件等,總結了發動機故障的模式;文獻[11]以國內4種泵壓式液體火箭發動機研制歷史為基礎,提出發動機常見的故障模式;文獻[12]對YF-75液體火箭發動機故障模式進行分析;文獻[13]針對某定型大型液體火箭發動機,論述了可能出現或已發生的故障模式;文獻[14]總結了發動機常見故障模式;文獻[15]收集了各種發動機試車故障情況,把故障類型分為6大類;基于已有文獻研究成果,歸納液體火箭發動機主要故障模式如表1所示,其中大部分故障與渦輪泵有關[16],渦輪泵故障率最高[11,14]。
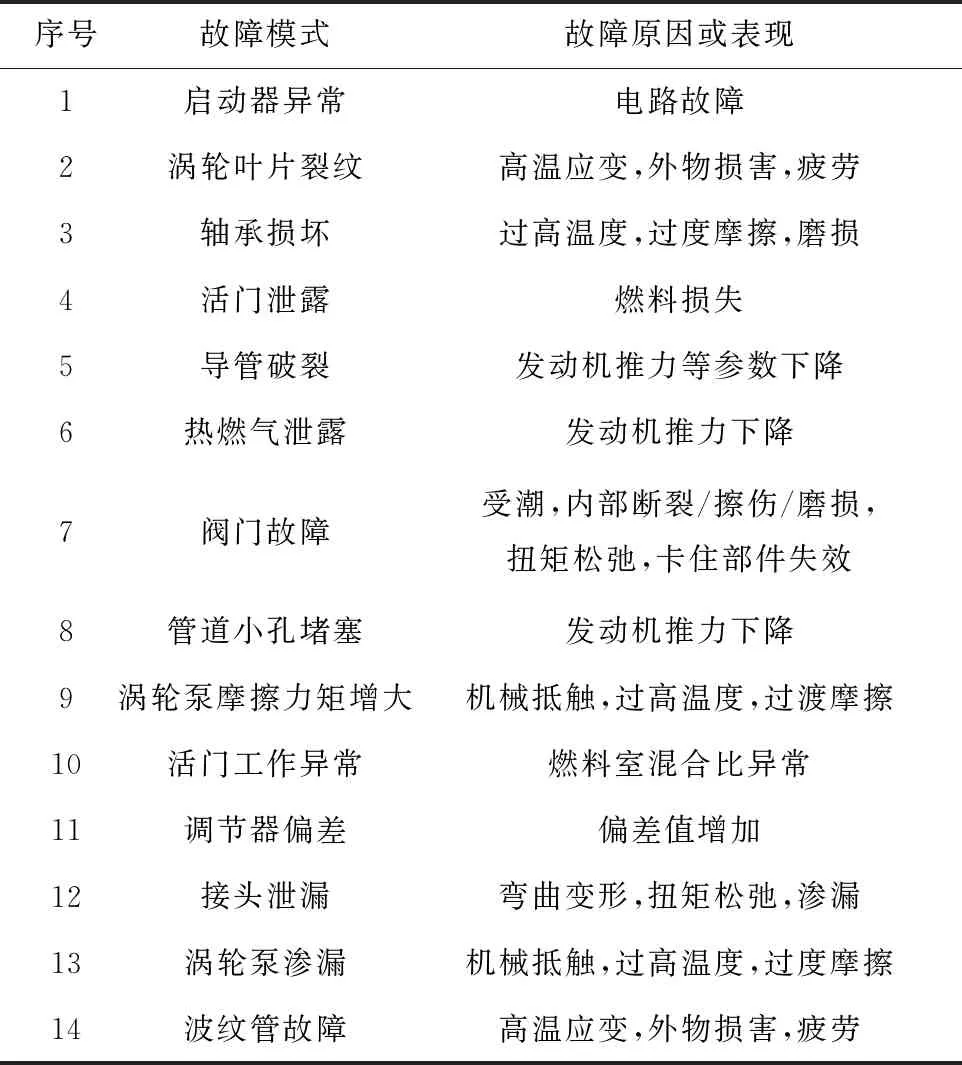
表1 泵壓式液體火箭發動機主要故障模式
在對液體火箭發動機進行故障診斷之前,需要提取發動機運行過程中的信號。由于液體火箭發動機結構緊湊,傳感器布置位置和數量受到限制,導致液體火箭發動機信號表征不強,給其物理信息的獲取帶來困難,常見的傳感器監控信號如表2所示。
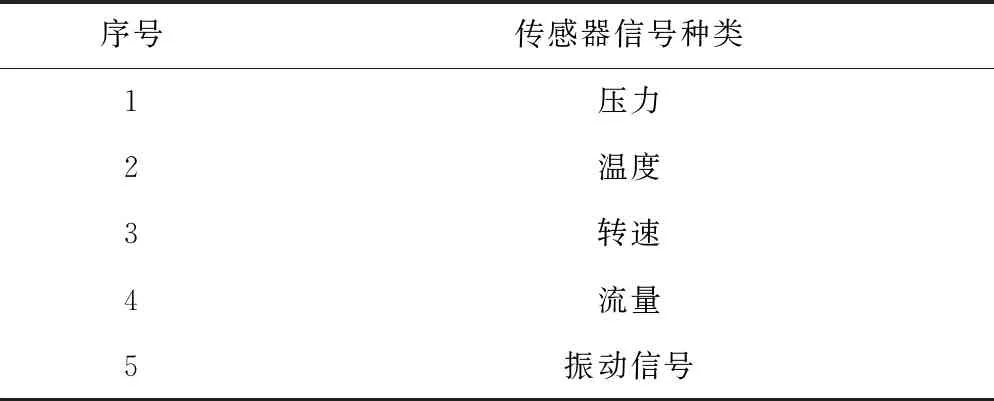
表2 常見液體火箭發動機監控信號
根據采集信號方式可將傳感器數據分成運行中的連續時序數據和狀態參數的離散數據兩大類[4],可以根據傳感器采集到的數據進行故障診斷。針對不同的信號選取種類和處理方法,現有的故障診斷方法包括基于模型、基于信號分析和基于人工智能的故障診斷[5,17]。
2 基于模型的故障診斷
2.1 基于時間序列算法的故障診斷方法
時間序列算法(ARMA)是用較早的信號來評估目前的信號,以信號結構模型實現對故障的檢測[5,17]。基于ARMA的模型已被用于穩態工況下快速性和振蕩性故障的檢測。該方法具有良好的魯棒性、實時性和實用性,國內外對此做了大量的研究。
2000年,王建波[18]介紹了用ARMA模型對YF-75發動機中出現的的泄漏故障進行分析檢測的方法。基于不同的檢測參數時間序列構建自回歸模型,模型的判別函數為Kullback-Leibler信息測度。該方法具有預警及預測能力,能實現泄漏故障的實時預測。針對重復使用火箭發動機,基于ARMA模型的實時故障診斷系統[19]仿真分析表明該算法能成功診斷出發動機的常見故障,并進行報警。2020年,鄧晨等[20]針對新一代大推力氫氧補燃循環液體火箭發動機主級工況,開發了基于ARMA模型的實時故障診斷算法、故障閾值求解方法及判別準則,證明了改進算法的高效性及有效性。此外,劉冰[21]、劉英元[22]等先后利用故障信號提取的方式對檢驗模型進行了驗證。
還有學者使用AR-CGARCH模型進行故障檢測,避免了傳統自適應閾值算法對時間序列方差跟蹤能力不足,以及故障階段帶寬自動放大的問題[23],證明時間序列分析的診斷方法在液體火箭發動機故障診斷領域有極大的發展潛力,
2.2 基于數學模型的故障診斷
1994年,張育林[24]等針對泵壓式供應系統液體火箭發動機提出了故障檢測與故障診斷的基本框架,如圖1所示。建立了基于發動機系統燃燒室壓力、燃燒室組元比、燃氣發生器室壓等11個狀態變量的非線性數學模型,研究了推廣的卡爾曼濾波的故障檢測方法和基于低階線性模型的故障診斷方法。
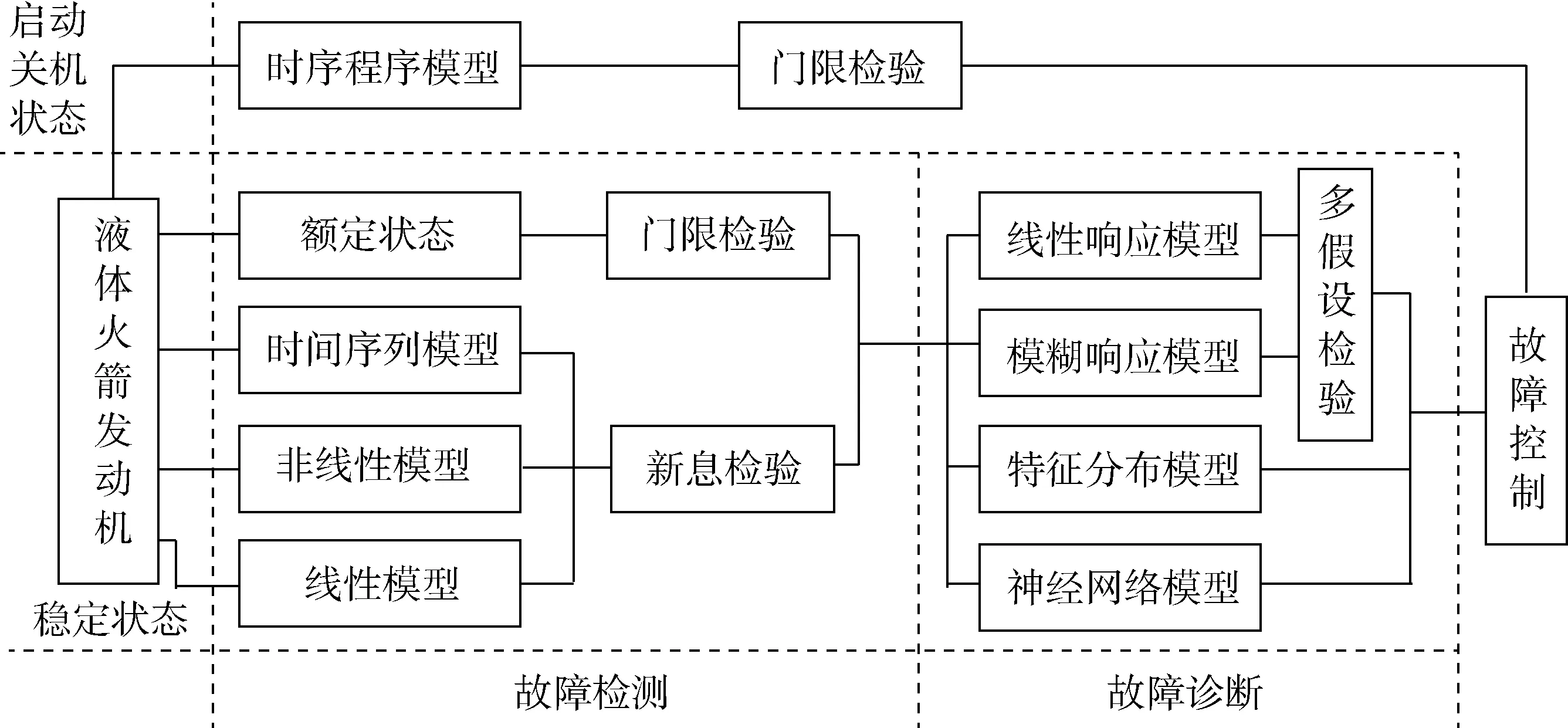
圖1 故障診斷系統與研究框架[24]
1997年,吳建軍等[25]基于液體火箭發動機故障診斷方法實時驗證的需求,將發動機全階非線性數學模型進行針對性優化,建立起發動機降階非線性動態模型,可以用來模擬發動機隨機動態特性。該模型在精確性、實時性等方面可以滿足實時性驗證的要求。朱恒偉[26]提出基于靜態方程形式的故障診斷策略,但該策略存在測量參數不足與反饋回路的問題,導致故障影響參數傳播、故障診斷有效性受到影響。針對以上問題,提出了反映部件特性的故障診斷策略,能夠實現與已有基于系統方程的診斷系統相一致的診斷效果。王碩等[27]基于運載火箭的動力學與運動學模型提出一種帶遺忘因子的多信息融合最小二乘算法,僅利用導航敏感器件的慣性測量信息,就實現了發動機的在線故障診斷,并通過仿真驗證了該方法的適應性和準確性。
根據模型的故障診斷方法,能夠反映大量發動機實際系統特性,雖已具備理論依據,但仍需要實際試車檢驗[28]。液體火箭發動機系統非常復雜,特別是其強非線性特性導致難以構建精準的數學模型,限制了基于模型故障診斷方法的應用。
基于系統辨識的模型能夠捕獲復雜物理過程,這種非線性數學模型更為簡單、明確[29]。Kyelim Lee等[30]針對開式循環液體火箭發動機穩態故障診斷,提出了基于卡爾曼濾波和故障因子法的故障檢測與診斷算法,該算法由閾值法、白度法、GLRT法和MM法組成。通過對開式循環全推理液體推進劑火箭發動機進行數值模擬,驗證了卡爾曼濾波算法在識別傳感器或內部元件故障發生位置方面的有效性,以及故障因子法在快速檢測內部元件故障發生的時間和位置方面的有效性。薛薇等[31]針對氫氧發動機的故障診斷,設計并構建了遞歸結構識別(RESID)模型,該模型以遞歸方式建立不同特征之間的相互關系,構建一個更高階的非線性回歸方程作為判別函數,并且通過半實物仿真驗證了該方法的有效性。
基于模型的故障診斷在原理上具有最高的精度,但由于液體火箭發動機中各部件強耦合,故障的結構參數維度通常遠大于傳感器能提供的參數維度,導致模型無法求解、建模難度及成本過高;另外基于模型的故障診斷的前提是有大量的發動機故障先驗知識,診斷結果的準確性直接依賴于所建立的數學模型與實際系統的相符程度。因此,僅從模型的角度出發難以滿足液體火箭發動機故障診斷的精度和速度要求,需要借助傳感器信號等具有結構和故障表征能力的數據進行分析。
3 基于信號分析的故障診斷方法
3.1 基于振動信號的故障診斷
液體火箭發動機在運行過程中會產生振動,這些振動可以引起系統故障,進而影響到整機性能。液體火箭發動機的振動包含了發動機的運行狀態和發動機結構等信息,其變化范圍在幾赫茲到幾十赫茲變化。利用動態測試儀對振動信號進行捕捉、處理、分析,能夠得到液體火箭發動機的運轉信息,進而對發動機的健康情況和系統性能作出評估,并進一步診斷故障[5]。
振動信號可以采用時域、頻域、時頻域的方法進行分析。在時域內,其分析指標包括幅值、周期、上升時間和下降時間等。在頻域內,其分析方法包括FFT、高頻譜分析、STFT、倒頻譜分析等。在時頻域內,分析方法主要包括小波分析、WD分布等[5]。
截至1990年,用于航天飛機主發動機振動監測的飛行加速度安全關機系統FASCOS,參加了多次地面試車[32],但由于儀器設備可靠性低,該系統未被用于飛行試車。1997年,針對YF-75發動機渦輪泵振動信號,朱恒偉[26]開發簡單實用的振動信號實時檢測方法;開發了基于比較細致的信號頻域特征和神經網絡的振動故障方法,計算復雜度較高,可進一步擴展為故障診斷方法[33]。
1996年,馬歇爾空間飛行中心開發了針對渦輪泵振動分析的航天發飛機主動機實時振動監測系統(RTVMS)[34],提高了渦輪泵設備的安全可靠性。1999年,RTVMS縮減版被引入參與了實際飛行試驗,該系統至今已為150臺次高壓渦輪泵靜態試驗提供主動振動監測,且從未出現系統故障。
2008年,夏魯瑞等[35]分析了汽輪泵轉子葉片斷裂脫落的典型故障原因,并采用動態分析的方法,研究了故障的振動特征,選擇了能有效揭示渦輪泵轉子葉片斷裂脫落典型故障的頻率特征;通過變換處理找出了速度變化對振動頻率的影響,提取出穩定的頻率特征。結合汽輪泵歷史試驗中的故障數據,通過跟蹤特征頻率的幅值變化,可以有效地檢測和診斷汽輪泵轉子葉片的斷裂和脫落故障,頻率特征提取的原理框圖如圖2所示。
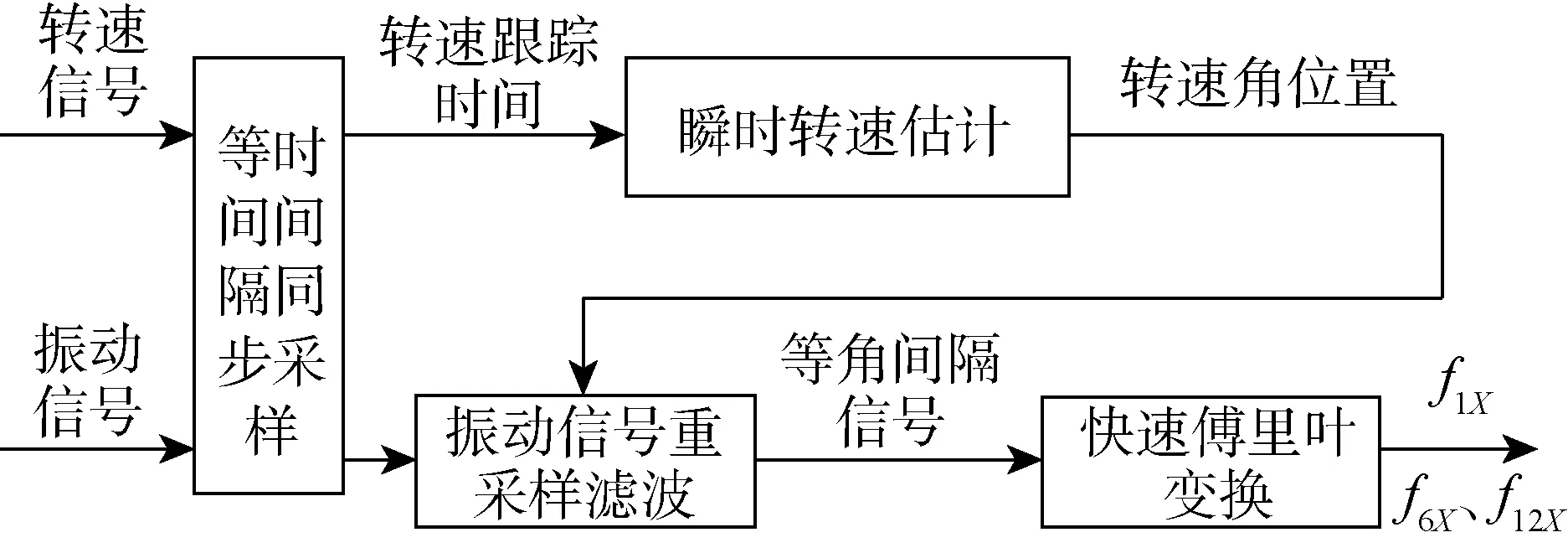
圖2 頻率特征提取原理圖[35]
3.2 基于羽流光譜技術的故障診斷
液體火箭發動機部件發生故障時,如渦輪泵、閥門和噴注器發生老化、磨損或燒蝕時,一些金屬雜質會從燃燒室進入羽流[36]。高溫時這些金屬雜質能發射出足夠強的可見輻射和紫外光譜用于檢測。羽流光譜技術具有誤診率低、算力要求較低、非侵入式、覆蓋信息廣等優點,自1986年至今,取得了很大的發展。美國研制的羽流光譜故障檢測與診斷系統,成功應用于航天飛機主發動機的地面試車健康監測。2001年,趙永學[36]通過仿真及實驗,研究了YF-75發動機故障的羽流光譜和氣氧/煤油火焰輻射光譜、模型發動機羽流輻射光譜,表明基于羽流輻射光譜的故障檢測技術非常適合發展為發動機健康監控及故障診斷技術。
相對基于模型的方法,信號分析的診斷方法擁有更佳的實時性,并已經實際應用在多種型號液體火箭發動機中。然而,該種方法對信號質量要求較高,由于液體火箭發動機實際運行工況變化劇烈,采集信號包含大量噪聲;并且發動機傳感器本身存在高漂、通道丟失等故障,所以依賴單一傳感器信號故障診斷的誤診率較高,而信號之間的耦合問題又給多信號綜合分析帶來了極大挑戰,實際過程中收集到的數據往往不能達到精度要求,這在一定程度上限制了基于信號分析的故障診斷方法的應用。
4 基于人工智能的故障診斷
4.1 基于專家系統的故障診斷
基于專家系統的故障診斷方法,是在大量的專家系統知識庫基礎上,推理機在一定的推理機制下,運用知識進行診斷推理。目前已研發的發動機故障檢測與診斷的專家系統包括AEROJETT公司研制的基于規則的Titan健康評估專家系統、LeRC開發的試車后數據自動評估系統、MSFC聯合Alabama大學開發的發動機數據解釋系統等[10]。專家系統還可以與發動機靜態數學模型相結合,在參數估計方法中引入專家系統推理過程的故障診斷策略[26]。
4.2 基于模糊理論的故障診斷
液體火箭發動機故障診斷過程存在各種不確定性,包括設備測量精度誤差、系統環境干擾噪聲、模型及故障描述的不精確性等。基于模糊理論的方法僅基于數據特征,因此在處理系統復雜性和不確定性方面具備一定的優勢[37];該類方法主要為基于模型聚類、基于模糊模型、基于模糊理論與其他方法相結合的方法。基于模糊模型的故障診斷方法,基于黑箱模型、歷史數據或其他知識,建立模糊模型模擬輸入輸出對象的對應關系,通過模型輸出與實際輸出的比較結果實現故障檢測與診斷[10]。
謝濤等[38]基于最大隸屬度原則的模糊聚類方法識別火箭發動機故障模式,基于模糊熵與方向相似度的液體火箭發動機故障檢測方法[39],采用基于廣義模糊熵的模糊Kohonen聚類網絡作為滑動數據窗口的聚類算法,對強干擾噪聲工況的魯棒性和適應性得到顯著提升[40]。周宵鵬等[41]提出了基于改進型可能性C-均質聚類和故障向量理論的故障診斷方法。董周杰等[42]利用提出一種基于數據驅動的綜合模糊聚類算法用于故障診斷,只需要少量先驗正常樣本數據就可以快速、準確檢測出故障的發生。王冠等[43]基于模糊聚類和LSTM網絡,提出了一種數據驅動的運載火箭發動機氧渦輪泵數據異常分析方法,通過模糊聚類對標簽不完整的數據樣本進行預分類,得到完整的標簽并且分析特征貢獻度,顯著增強了系統故障檢測的能力。
模糊理論可以與專家系統、神經網絡等相結合,實現更有效的故障診斷[43-47]。
4.3 基于遺傳算法模型的故障診斷
遺傳算法已經廣泛運用在機器學習、信號處理、組合優化等領域。2008年,楊晉朝[3]將液體火箭發動機故障檢測與診斷中的關鍵技術問題轉化為相應的優化問題,并用遺傳算法和量子遺傳算法加以解決,提出了將遺傳算法與BP神經網絡深度交叉混合的遺傳神經網絡。性能分析表明,該算法相比于BP算法更易于找到全局最優解,同時克服了遺傳算法搜索性能相對較低的問題;該算法還能夠避免通過經驗數據方法選用權值和閾值的弊端,能夠較全面、充分地表達診斷故障的特征信息,提高神經網絡非線性映射的能力。Yu等[44]提出了一種自適應遺傳算法優化的BP神經網絡的液體火箭發動機實時故障檢測方法,仿真分析結果表明,該方法檢測結果比BP神經網絡模型更接近實際,效果更快。在遺傳神經網絡模型中,采用遺傳模糊C均質算法,使聚類算法具有更好的搜索結果和較優的目標函數值,分類錯誤率更低,能夠全部準確監控正常試車數據,并準確診斷出兩次發動機故障[1]。李寧寧等[48]針對BP神經網絡容易受到局部極小點的缺點,用遺傳算法來優化BP網絡,構建了發動機工作過程的非線性辨識模型,并使用歷史數據與BP神經網絡故障檢測模型進行對比,驗證了該方法可靠性和精確性。
4.4 基于決策樹模型的故障診斷
決策樹是一個類似于流程圖的樹狀結構,將分類和決策作為目的,以實例為基礎進行歸納學習。決策樹方法將專家診斷知識隱含在整個決策樹的各個葉節點和內部節點上,根據節點屬性及取值體現診斷知識的條件部分,葉節點指向知識結論部分[49]。
2007年,韓泉東等[49]以泵壓式液體火箭發動機為研究對象,針對故障特征難以提取的問題,提出了在大量試車數據的基礎上,應用決策樹方法提取故障特征并進行穩態段故障檢測與診斷的思路,對某型發動機大量熱試車數據進行了實例分析,將得到的故障檢測和診斷結果與神經網絡等方法所得結果進行了比較,并利用仿真數據對該方法的性能進行了進一步驗證,結果表明,決策樹方法是一種有效、可靠的火箭發動機故障檢測與診斷的新途徑。
4.5 基于神經網絡模型的故障診斷
神經網絡憑借其具有的高度自適應能力和極強的容錯性等特點,在火箭發動機故障診斷領域得到了極大的發展[50-52]。主要的神經網絡模型有自適應共振理論ART神經網絡、反傳BP神經網絡、動態神經網絡等[5]。
ART屬于無監督自適應神經網絡,可以對二維模式進行自組織和大規模并行處理。ART-2模型對于非平衡、不可預測的故障檢測環境,具有自穩定、自組織和彈性應變等特點。該類神經網絡的主要原理為:將測量數據經快速傅里葉變換后,得出功率譜密度分布,再根據該功率譜密度與通過學習算法獲得的權值數據計算其歐氏距離,通過檢驗獲得其具有最小值的點,從而實現故障的分類檢測。經過訓練的ART-2神經網絡,可形成分別表征正常狀態和故障狀態的權值數據,試驗輸入輸出故障檢測與診斷系統經對比分類,得到正常狀態或有故障特征的輸出結果[11]。
反傳BP神經網絡可將傳統的故障模式識別及分類方法中的三步,即測量、特征提取、分類,融合在一起,自動提取故障特征。
動態神經網絡用于發動機故障檢測時,不需要發動機系統的工作特性模型,僅通過基于傳感器測量數據,即可根據狀態特征辨識產生的殘差值來檢測故障,并通過辨識殘差相關函數對故障類型實現分類,滿足對故障檢測與分離的實時性工程要求[5]。
1998年,王建波等[53]提出了基于徑向基函數神經網絡的液體火箭發動機動態過程建模,仿真結果表明可以達到很好的逼近精度;2000年,于達仁等[54]以一個典型的泵壓式液體火箭發動機為對象,針對發動機的幾種泄露故障,用自組織網絡識別降維樣本,仿真發現自組織網絡可以對發動機的泄露故障模式進行很好的聚類。
2001年,張煒等[55]針對液體火箭發動機系統多故障同時發生的現象,通過分析故障的特征表現建立渦輪泵系統的標準故障模式,在此基礎上提出并采用并行BP神經網絡進行多故障診斷分類的方法,結果表明基本BP神經網絡對于給定的訓練樣本能夠較好地實現模式表達;楊爾輔等[56]提出了一種應用故障機理模型和SOM(Self-organization Mapping)神經網絡的實時故障診斷方法,以解決單純依靠故障機理模型進行診斷時遇到的實時性問題和單純依靠SOM神經網絡診斷時遇到的故障樣本獲取問題;2009年,楊晉朝等[57]將遺傳算法與BP神經網絡深度交叉融合,克服了遺傳算法以類似窮舉的形式尋找最優解導致算力要求過高、BP算法易陷入局部最優解的缺點。
2011年,劉垠杰等[58]將云模型與BP神經網絡以串聯方式有機結合,利用云變換方法針對網絡結構辨識和云模型進行特征提取,通過在輸入層引入單位延時處理來描述發動機工作過程中的動態特性,提出了基于動態云BP網絡的液體火箭發動機故障診斷方法。該方法能準確識別發動機已有的3種故障模式,單步運行時長為1.124×10-4s,完全滿足實時性要求,云神經網絡的結構如圖3所示。

圖3 云神經網絡結構[58]
2013年,彭小輝等[59]針對當前模式分類方法難以處理不確定性信息、屬性特征空間的劃分過硬等缺陷,結合云模型和云變換研究,提出了一種基于云分類器的液體火箭發動機起動過程故障診斷方法,相比于包絡線算法、BP神經網絡算法、RBF神經網絡算法和紅線關機算法的故障檢測性能,該算法在診斷及時性上有一定進步。
2020年,Park等[60]使用數值模型構建發動機啟動期間潛在故障類型的數據集,來訓練神經網絡,故障診斷基于CNN-LSTM,該方法與傳統的紅線截止相比具有優越的二元/多分類性能,并證實了該方法對實際液體火箭發動機的適用性。
4.6 基于主成分分析的故障診斷
主成分分析(PCA)作為一種數據降維方法,已被應用于故障診斷任務中。該方法基于數據生成主成分,在測試時根據測試數據主成分與正常數據的偏離值進行閾值判斷,進而診斷故障[61]。張振臻等[62]提出一種與滑動時間窗結合的PCA故障診斷方法,基于發動機試車數據進行驗證,該方法可以實現對4種常見傳感器故障和2種發動機試驗故障進行診斷。
4.7 基于支持向量機模型的故障診斷
支持向量機(SVM)建立在統計學習理論的基礎上,是一種更為前沿的的機器學習分類方法。SVM有著嚴格的理論和數學基礎,通過最小化經驗風險,在有限的學習精度和學習泛化能力之間尋求最佳折中。支持向量機能夠克服傳統機器學習中過學習、局部值極小等問題。實際過程中樣本數目往往有限,支持向量機專門針對小樣本,具有巨大的應用潛力。
支持向量機的基本思想可以用二維最優超平面示意圖進行說明[63],如圖4所示。圖中,實心和空心點代表兩類樣本,H1和H2代表分類線。如果H1和H2正確地將兩類樣本分開,則間隔最大的分類線即為最優分類線[63]。推廣到高維空間,最優分類線即演變為最優分類面。其核心思想是在進行分類時,對于線性不可分樣本,通過非線性映射(核函數),將原空間樣本映射到高維特征空間(核空間),使得在樣本核空間中線性可分或近似線性可分,從而在核空間中進行線性分類[3]。
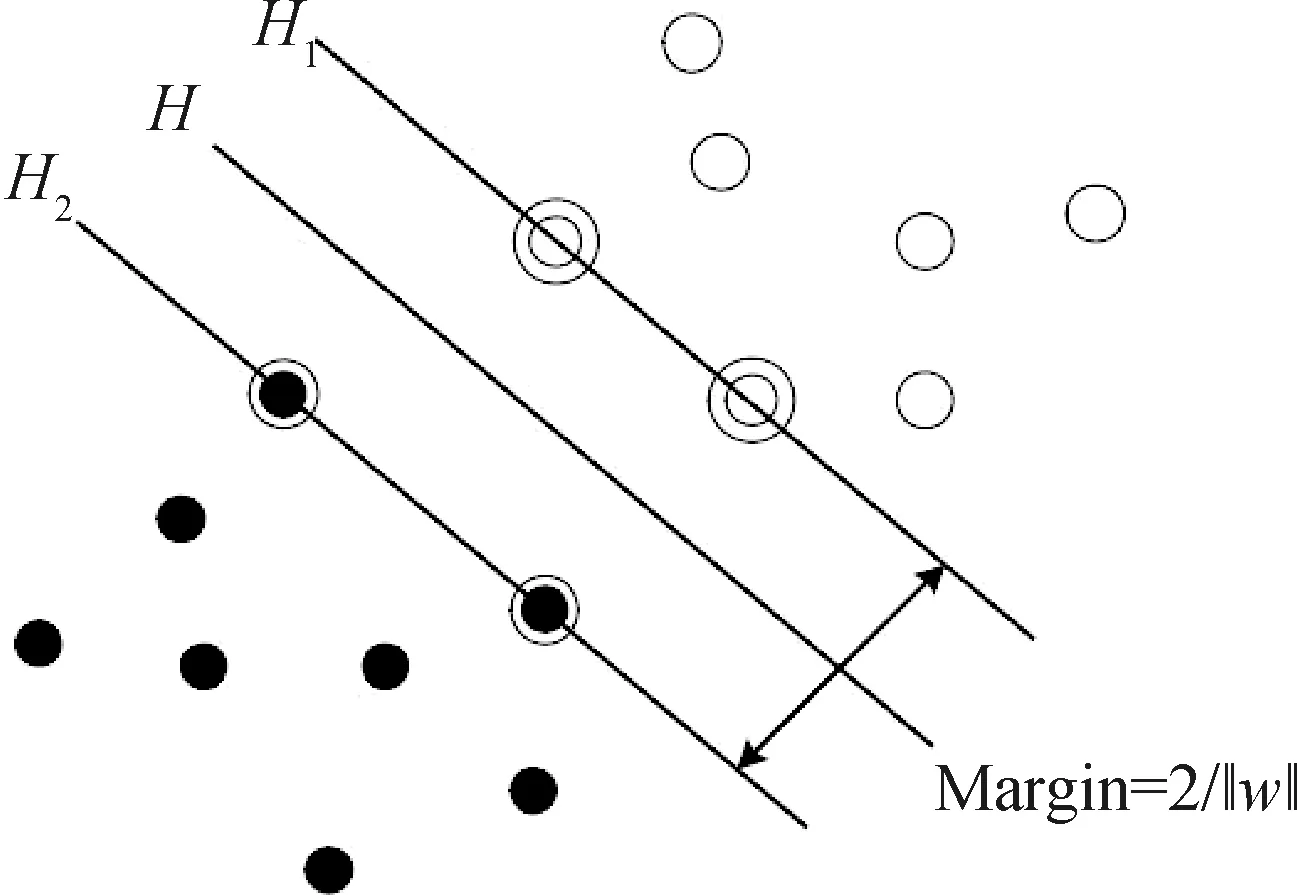
圖4 最優超平面示意圖[63]
2007年,韓泉東等[63]將支持向量機模型用于某種大型液體火箭發動機穩態試車數據挖掘,建立了多故障分類器,如圖5所示。基于23次試車數據對挖掘結果進行測試,并用28類仿真穩態故障數據進一步驗證,結果表明,支持向量機是基于小樣本、有效的液體火箭發動機故障檢測和診斷方法。

圖5 多故障分類器流程圖[63]
何浩等[64]用SVM對液體火箭發動機的故障數據進行檢測和診斷。通過學習發動機仿真模型中的9種數據,檢測出18組數據中的17組,有4組出現誤報,進而對誤報故障進行二次學習和再檢測,能正確檢測這4種故障。經過對C75試車4種故障數據的學習,能正確檢測其故障類型,進一步驗證了該方法的正確性和可行性。
郭小鳳等[4]針對試驗參數多樣、數據復雜且相關等特點,研究了基于PCA-SVM的液體火箭發動機試驗臺故障診斷方法,基于主元分析法進行原始數據特征工程、基于累計貢獻率函數選取主元數目,降低了數據維數和計算復雜度;采用了基于聚類的二叉樹方法,建立了多故障分類器模型,解決了標準支持向量機不適用于多值分類的問題。基于主元分析和支持向量機的試驗臺故障診斷分類器,在小樣本情況下識別率高于BP神經網絡,具有較高的識別率、更好的分類性能、更高的診斷精度。
單類支持向量機算法[65]、雙閾值單類支持向量機在線檢測算法[66],以及基于凸頻分量均方根和支持向量機的故障檢測算法[67],使得支持向量機模型在故障檢測方面得到了進一步應用,并為支持向量機在故障診斷中的應用開辟了空間。
不同的人工智能方法的理論基礎不同,應用特點也存在差異,本文針對不同的故障診斷方法,從所需基礎、優點和缺點等3個方面進行對比分析,如表3所示。由于液體火箭發動機實驗成本較高,試車數據量小,獲得故障狀態數據困難,因此目前能夠處理小樣本的決策樹、支持向量機等傳統機器學習模型擁有更佳的表現和更廣泛的應用[64]。但在未來實驗數據量積累到一定程度或使用仿真手段獲得大量數據的背景下,擁有更大模型容量的深度學習模型是值得探索的方案。
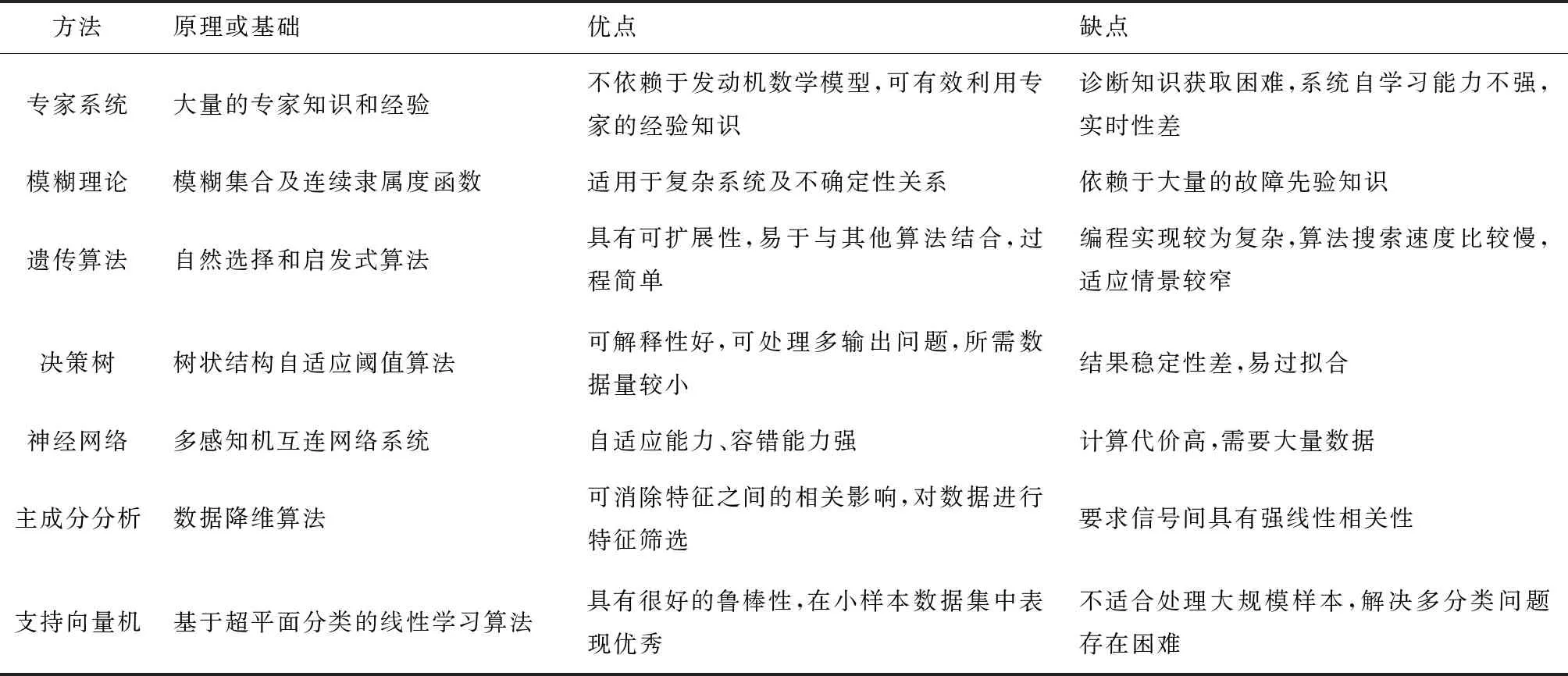
表3 基于人工智能的故障診斷方法的對比分析
5 結論
現代計算機技術、先進傳感器技術、信號處理技術、人工智能技術,液體火箭發動機故障診斷技術正朝著智能化,高效化,泛化的方向發展。但部分故障特征相似、傳感器參數耦合帶來的影響以及大容量模型帶來的預測速度慢和實時性差等問題仍制約著液體火箭發動機故障診斷技術的發展。
未來需繼續完善故障數據庫,并進一步識別故障模式;發展解耦算法,準確提取識別故障特征的關鍵數據;改進優化目前已有的算法或開發新的算法,以滿足高效性和實時性的要求。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48