基于長(zhǎng)短時(shí)神經(jīng)網(wǎng)絡(luò)的衛(wèi)星陀螺儀故障檢測(cè)*
2023-03-13 02:35:36林玨琪
航天控制 2023年1期
徐 馳 林玨琪
中山大學(xué)物理與天文學(xué)院,珠海 519082
0 引言
衛(wèi)星長(zhǎng)期在復(fù)雜的空間環(huán)境中工作,星上設(shè)備常有故障發(fā)生。陀螺儀為姿態(tài)控制系統(tǒng)提供衛(wèi)星姿態(tài)信息,它正常穩(wěn)定運(yùn)行對(duì)衛(wèi)星姿態(tài)控制具有舉足輕重的影響[1]。因此,及時(shí)準(zhǔn)確檢測(cè)陀螺儀故障并采取有效措施能夠提高衛(wèi)星可靠性,保證航天任務(wù)順利進(jìn)行。
陀螺儀的故障檢測(cè)方法主要有3類[2]:1)基于模型的方法[3-4]、基于信號(hào)處理的方法[5]以及神經(jīng)網(wǎng)絡(luò)的方法[6-7]。目前,基于模型的方法需要依賴由陀螺儀和星敏感器構(gòu)成的冗余配置,并且建立的模型與系統(tǒng)真實(shí)運(yùn)行情況間存在誤差。而基于信號(hào)處理的方法過(guò)于依賴信號(hào)特征的變化,存在故障漏報(bào)的風(fēng)險(xiǎn)。神經(jīng)網(wǎng)絡(luò)具有強(qiáng)大的非線性逼近能力,高效的處理能力以及良好的自適應(yīng)性,成為衛(wèi)星陀螺儀故障檢測(cè)的重要手段。目前在衛(wèi)星陀螺儀故障檢測(cè)方面采用的大多數(shù)是一些結(jié)構(gòu)簡(jiǎn)單的神經(jīng)網(wǎng)絡(luò),這將導(dǎo)致模型擬合能力較弱,泛化性能較差,從而影響衛(wèi)星陀螺儀故障檢測(cè)能力。相比于傳統(tǒng)神經(jīng)網(wǎng)絡(luò),LSTM神經(jīng)網(wǎng)絡(luò)更適于時(shí)間序列的處理,能夠快速、準(zhǔn)確地實(shí)現(xiàn)陀螺儀故障檢測(cè)。
本文提出了一種基于LSTM神經(jīng)網(wǎng)絡(luò)的衛(wèi)星陀螺儀故障檢測(cè)方法。首先,利用陀螺儀正常數(shù)據(jù)訓(xùn)練LSTM神經(jīng)網(wǎng)絡(luò)得到陀螺儀正常工作輸出模型。然后,通過(guò)網(wǎng)絡(luò)產(chǎn)生的預(yù)測(cè)誤差進(jìn)一步得到檢測(cè)閾值。最后,利用完成訓(xùn)練的輸出模型實(shí)現(xiàn)在線檢測(cè),根據(jù)檢測(cè)誤差是否超出閾值判斷故障是否發(fā)生。利用半物理仿真平臺(tái)模擬的數(shù)據(jù),驗(yàn)證提出算法的準(zhǔn)確性和有效性。
1 模型分析
1.1 衛(wèi)星姿態(tài)系統(tǒng)模型
衛(wèi)星姿態(tài)控制系統(tǒng),具體由衛(wèi)星本體、姿態(tài)敏感器(星敏感器和陀螺儀)、姿態(tài)控制器和執(zhí)行器構(gòu)成。其中,姿態(tài)敏感器測(cè)量出衛(wèi)星姿態(tài)信息,姿態(tài)確定算法得出衛(wèi)星的估計(jì)姿態(tài),控制器根據(jù)估計(jì)姿態(tài)與期望姿態(tài),依照控制律輸出控制命令,執(zhí)行機(jī)構(gòu)根據(jù)指令輸出控制力矩,完成衛(wèi)星姿態(tài)控制。
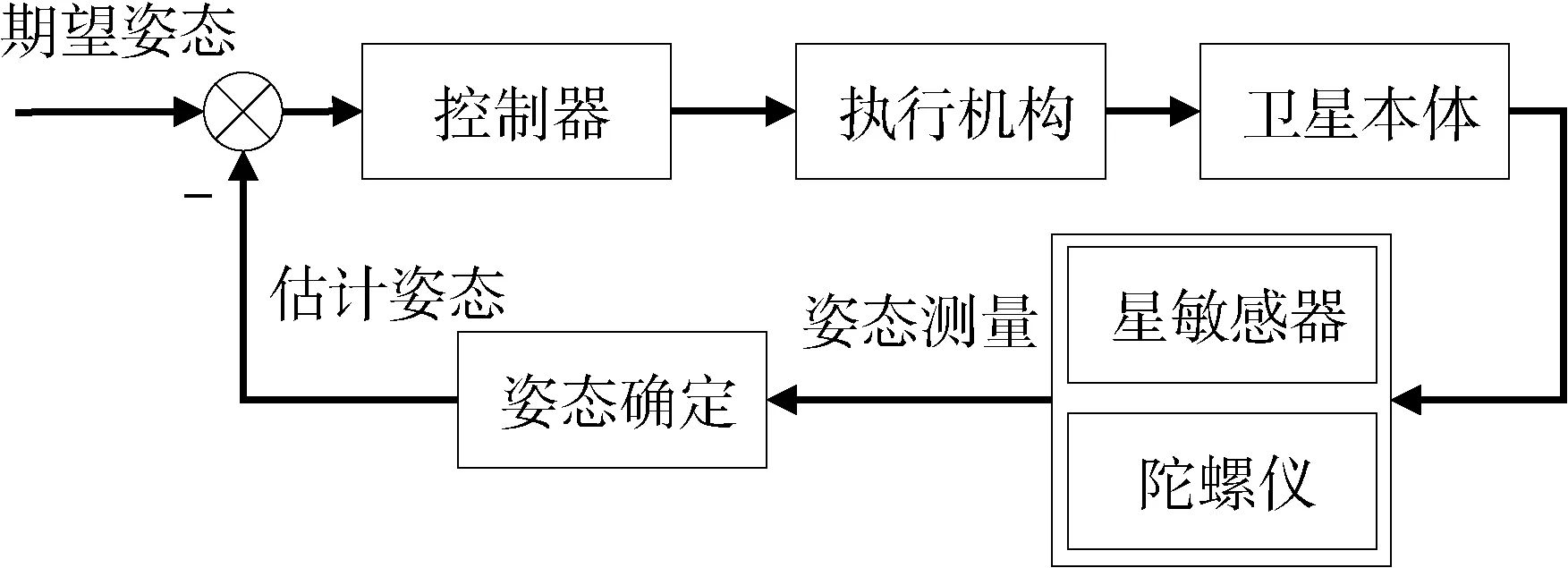
圖1 衛(wèi)星姿態(tài)控制系統(tǒng)原理圖
由四元數(shù)定義的衛(wèi)星姿態(tài)運(yùn)動(dòng)學(xué)方程為:
(1)
式中:q=[q1,q2,q3,q4]T為衛(wèi)星姿態(tài)四元數(shù),ω=[ωx,ωy,ωz]T為衛(wèi)星相對(duì)參考坐標(biāo)系的轉(zhuǎn)動(dòng)角速度,其中:
利用歐拉方程描述衛(wèi)星的動(dòng)力學(xué)方程:
(2)
式中:H=Iω為衛(wèi)星轉(zhuǎn)動(dòng)角動(dòng)量,H×表示為H的反對(duì)稱矩陣;I表示衛(wèi)星的轉(zhuǎn)動(dòng)慣量矩陣;Td表示為外部干擾力,Mc表示為姿態(tài)控制力矩。
1.2 陀螺儀數(shù)學(xué)模型與故障建模
在衛(wèi)星姿態(tài)控制系統(tǒng)中,陀螺儀測(cè)量慣性系下的衛(wèi)星角速度在測(cè)量系下的投影,由于陀螺儀通常安裝在衛(wèi)星本體坐標(biāo)系下,此時(shí)測(cè)量系與衛(wèi)星本體坐標(biāo)系重合,陀螺儀數(shù)學(xué)模型[8]表示為:
(3)

陀螺儀的常見(jiàn)故障有卡死故障、噪聲故障、偏差故障3種形式[8]。
1)卡死故障:由于表頭故障,陀螺儀輸出為一定值,實(shí)際輸出為:
(4)
式中:ωo(t)為陀螺儀的實(shí)際輸出;ωe(t)為陀螺儀的理論輸出;tf為故障發(fā)生時(shí)刻。
2)噪聲故障:由于線路盒電壓輸出不穩(wěn),陀螺儀測(cè)量時(shí)隨機(jī)噪聲突然增大,實(shí)際輸出為:
(5)
式中:ωf(t)為陀螺儀測(cè)量噪聲,n噪聲為故障增益,通常隨機(jī)噪聲增益擴(kuò)大到2倍以上(即n>2),認(rèn)定為噪聲故障。
3)偏差故障:由于漂移增大,導(dǎo)致陀螺儀輸出出現(xiàn)偏差,實(shí)際輸出為:
(6)
式中:Δω(t)為故障偏差信號(hào)。
2 基于LSTM神經(jīng)網(wǎng)絡(luò)的陀螺儀故障檢測(cè)方法
2.1 LSTM網(wǎng)絡(luò)
LSTM神經(jīng)網(wǎng)絡(luò)是一種用于處理時(shí)間序列的循環(huán)網(wǎng)絡(luò)(RNN, Recurrent Neural Network),其通過(guò)獨(dú)特的門限機(jī)制,控制前期信息的積累速度,可以解決RNN網(wǎng)絡(luò)梯度爆炸和長(zhǎng)期依賴問(wèn)題[9-10],具體結(jié)構(gòu)如圖2所示。LSTM網(wǎng)絡(luò)結(jié)構(gòu)中的遺忘門、輸入門和輸出門用來(lái)控制細(xì)胞狀態(tài)。
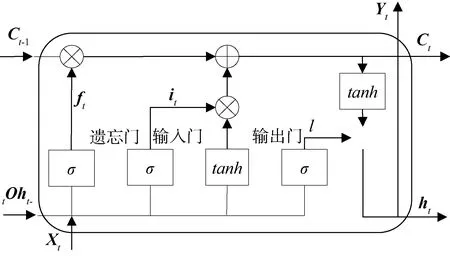
圖2 LSTM網(wǎng)絡(luò)單元結(jié)構(gòu)
LSTM網(wǎng)絡(luò)單元結(jié)構(gòu)中信息流動(dòng)可以用式(7)~(11)來(lái)表示:
ft=σ(Wf·[ht-1,Xt]+bf)
(7)
(8)
(9)
Ot=σ(Wo·[ht-1,Xt]+bo)
(10)
ht=Yt=Ot?tanh(Ct)
(11)
式(7)~(11)中:?表示兩個(gè)向量元素對(duì)應(yīng)相乘;σ(·)為Sigmoid函數(shù);tanh(·)為Tanh函數(shù);變量Wζ與bξ,其中ζ,ξ∈(f,i,c,o)分別表示在不同位置的輸出權(quán)重和偏執(zhí)矩陣。
2.2 故障檢測(cè)流程
本文提出一種基于LSTM神經(jīng)網(wǎng)絡(luò)的陀螺儀故障檢測(cè)模型,具體框架如圖3所示。
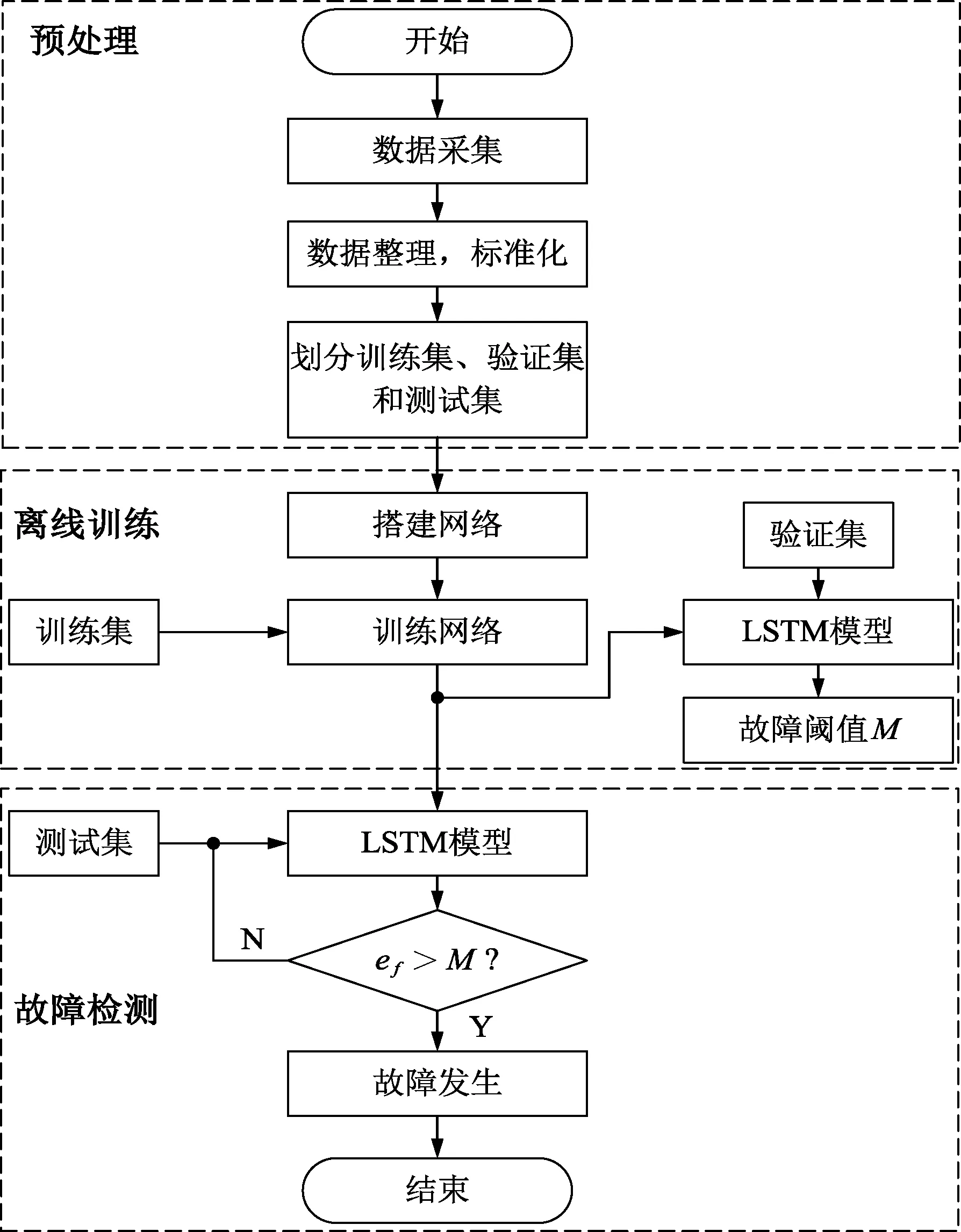
圖3 基于LSTM的衛(wèi)星陀螺儀故障檢測(cè)流程框圖
1)預(yù)處理階段
采集頻率10Hz記錄實(shí)驗(yàn)數(shù)據(jù),整理陀螺儀正常卡死故障、噪聲故障以及偏差故障數(shù)據(jù),完成數(shù)據(jù)歸一化,本文采用歸一化方法如式(12)所示:
(12)
式中:ω,ωmin和ωmax分別表示原始數(shù)據(jù)以及數(shù)據(jù)中最小值與最大值,ωm表示歸一化后數(shù)據(jù)值。
將歸一化后的數(shù)據(jù)進(jìn)一步劃分用于網(wǎng)絡(luò)訓(xùn)練的訓(xùn)練集Vt,設(shè)定故障閾值的驗(yàn)證集Vd,以及測(cè)試模型實(shí)時(shí)性與準(zhǔn)確性的測(cè)試集Vf。
2)離線訓(xùn)練階段
將訓(xùn)練集Vt按照輸入時(shí)間長(zhǎng)度ls劃分,得到一組時(shí)間序列,且依次后移一個(gè)輸入時(shí)間長(zhǎng)度,以此形成輸入LSTM網(wǎng)絡(luò)訓(xùn)練的數(shù)據(jù)集。然后,將訓(xùn)練輸入LSTM網(wǎng)絡(luò)的輸入層,經(jīng)過(guò)多層LSTM網(wǎng)絡(luò)的隱藏層處理后,進(jìn)一步導(dǎo)入全連接層,保證此時(shí)的數(shù)據(jù)維度降低至與標(biāo)簽一致,即輸出時(shí)間長(zhǎng)度lp,對(duì)應(yīng)關(guān)系如式(13)所示:
(13)
式中:LSTM(·)表示LSTM神經(jīng)網(wǎng)絡(luò)處理數(shù)據(jù)過(guò)程。最后,利用反向傳播算法(Back-Propagation Through Time, BPTT)計(jì)算網(wǎng)絡(luò)模型結(jié)構(gòu)參數(shù),得到訓(xùn)練完成的LSTM模型。

(14)
本文通過(guò)計(jì)算無(wú)故障時(shí)預(yù)測(cè)誤差數(shù)值的平均值與標(biāo)準(zhǔn)差獲得閾值的表達(dá)式:
M=ηe+α×δe
(15)
式中:μe和δe殘差eTr的均值和標(biāo)準(zhǔn)差,α為常數(shù),當(dāng)α=2.6時(shí),此時(shí)達(dá)到99%的置信區(qū)間[11]。
驗(yàn)證集Vd中陀螺儀輸出角速度數(shù)據(jù)輸入訓(xùn)練好LSTM網(wǎng)絡(luò),網(wǎng)絡(luò)輸出預(yù)測(cè)值,根據(jù)式(14)得到預(yù)測(cè)誤差ev,根據(jù)式(15)得到故障閾值M。
3)檢測(cè)階段
測(cè)試集Vf含故障數(shù)據(jù)集中的角速度數(shù)據(jù)輸入訓(xùn)練完成的LSTM網(wǎng)絡(luò),網(wǎng)絡(luò)輸出預(yù)測(cè)值,通過(guò)預(yù)測(cè)誤差ef與故障閾值M的比較,判定故障是否發(fā)生。
3 仿真校驗(yàn)
仿真試驗(yàn)包括故障數(shù)據(jù)采集、網(wǎng)絡(luò)訓(xùn)練以及故障檢測(cè)3個(gè)部分。
3.1 數(shù)據(jù)采集
設(shè)定仿真實(shí)驗(yàn)步長(zhǎng)為0.1s,陀螺儀常值漂移取β(t)=1((°)/h)、零均值高斯噪聲方差取σv=0.1((°)°/h)和漂移均方差取σu=0.01((°)/h)。設(shè)定星敏感器傳遞系數(shù)為0.99,輸出衛(wèi)星姿態(tài)信息,并且陀螺儀與星敏感器測(cè)量坐標(biāo)系與衛(wèi)星本體坐標(biāo)系重合。衛(wèi)星轉(zhuǎn)動(dòng)慣量矩陣
首先,利用Matlab2020a完成衛(wèi)星姿態(tài)控制系統(tǒng)的搭建,并且記錄正常情況下陀螺儀的輸出數(shù)據(jù)。其次,根據(jù)式(3) ~ (5)中陀螺儀故障模型,將各個(gè)故障狀態(tài)時(shí)陀螺儀輸出特征注入正常情況的系統(tǒng),得到各種故障狀態(tài)下陀螺儀輸出數(shù)據(jù),故障注入的時(shí)間是隨機(jī),并且持續(xù)一段時(shí)間。最后,正常、卡死故障、噪聲故障、偏差故障下陀螺儀輸出數(shù)據(jù)每種分別采集2000組。正常數(shù)據(jù)分成訓(xùn)練集Vt、驗(yàn)證集Vd,其中,訓(xùn)練集Vt用來(lái)訓(xùn)練LSTM網(wǎng)絡(luò)預(yù)測(cè)模型,不斷優(yōu)化網(wǎng)絡(luò)結(jié)構(gòu)參數(shù);驗(yàn)證集Vd用來(lái)輸入訓(xùn)練完成的LSTM網(wǎng)絡(luò)模型,利用預(yù)測(cè)誤差ev,不斷調(diào)整靈敏度常數(shù),計(jì)算故障檢測(cè)閾值。由卡死故障、噪聲故障和偏差故障數(shù)據(jù)構(gòu)成的測(cè)試集Vf用來(lái)驗(yàn)證基于LSTM神經(jīng)網(wǎng)絡(luò)的陀螺儀故障檢測(cè)模型的準(zhǔn)確性。
3.2 網(wǎng)絡(luò)訓(xùn)練與對(duì)比
正常訓(xùn)練集Vt數(shù)據(jù)建立LSTM網(wǎng)絡(luò)預(yù)測(cè)模型,采用梯度下降法進(jìn)行訓(xùn)練,根據(jù)經(jīng)驗(yàn)與實(shí)驗(yàn)測(cè)試設(shè)定網(wǎng)絡(luò)模型參數(shù)。本文選定LSTM網(wǎng)絡(luò)的輸入時(shí)間窗口長(zhǎng)度為ls=300,輸出時(shí)間窗口為lp=1。LSTM神經(jīng)網(wǎng)絡(luò)總設(shè)定有3個(gè)隱藏層,每層分別含有64,256,100個(gè)神經(jīng)元,每層之間設(shè)置0.2的丟棄率,防止模型過(guò)擬合。設(shè)置網(wǎng)絡(luò)學(xué)習(xí)率為0.005,訓(xùn)練循環(huán)迭代訓(xùn)練250次。將驗(yàn)證集Vd中一組數(shù)據(jù)代入訓(xùn)練好的LSTM網(wǎng)絡(luò),真實(shí)值與網(wǎng)絡(luò)預(yù)測(cè)值對(duì)比如圖4所示,LSTM網(wǎng)絡(luò)預(yù)測(cè)值可以很好地隨著真實(shí)值波動(dòng),無(wú)突變。
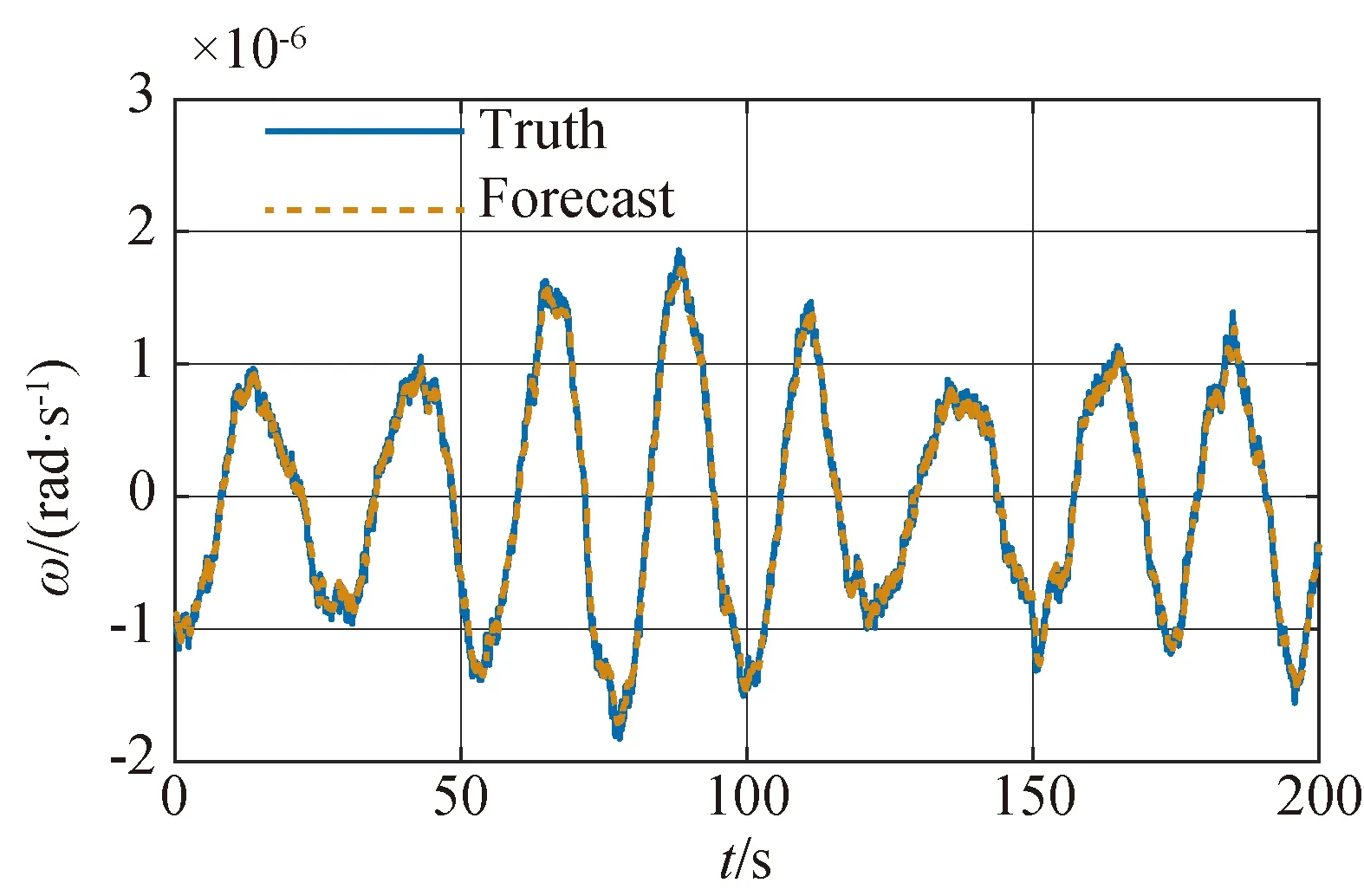
圖4 真實(shí)值與LSTM網(wǎng)絡(luò)預(yù)測(cè)值
模型預(yù)測(cè)值與真實(shí)值越相近,預(yù)測(cè)誤差波動(dòng)范圍越小,模型對(duì)故障導(dǎo)致輸出的變化越敏感,故障檢測(cè)越準(zhǔn)確。為了反映訓(xùn)練完成網(wǎng)絡(luò)模型預(yù)測(cè)值與真實(shí)值之間誤差差距,以誤差均方根差(root mean square error, RMSE)的大小進(jìn)行衡量,則其公式如下:
(16)

同時(shí),為驗(yàn)證LSTM網(wǎng)絡(luò)對(duì)陀螺儀輸出數(shù)據(jù)學(xué)習(xí)預(yù)測(cè)性能優(yōu)異,利用訓(xùn)練集Vt對(duì)參數(shù)相同的ANN(Artificial Neural Network)、FNN(Feedforward Neural Network)、RNN以及LSTM網(wǎng)絡(luò)進(jìn)行訓(xùn)練,并且選取10組驗(yàn)證集中數(shù)據(jù)進(jìn)行測(cè)試,取每組預(yù)測(cè)誤差RMSE的平均值進(jìn)行比較,結(jié)果如圖5所示。

圖5 四種神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)殘差的RMSE比較圖
LSTM網(wǎng)絡(luò)模型預(yù)測(cè)誤差RMSE分布中位數(shù)為rmseLSTM=0.0418,均低于其余網(wǎng)絡(luò)(rmseANN=0.0483,rmseFNN=0.0465,rmseRNN=0.0438)。由于ANN和FNN網(wǎng)絡(luò)結(jié)構(gòu)無(wú)法對(duì)過(guò)往信息進(jìn)行利用,RNN網(wǎng)絡(luò)缺少門控結(jié)構(gòu),無(wú)法對(duì)過(guò)往信息進(jìn)行取舍利用,故LSTM網(wǎng)絡(luò)預(yù)測(cè)模型的表現(xiàn)優(yōu)于ANN,F(xiàn)NN和RNN網(wǎng)絡(luò)。
3.3 故障閾值計(jì)算
驗(yàn)證集Vd數(shù)據(jù)輸入完成訓(xùn)練的LSTM神經(jīng)網(wǎng)絡(luò),通過(guò)網(wǎng)絡(luò)預(yù)測(cè)值與真實(shí)值的比較,得到預(yù)測(cè)誤差的分布,取閾值靈敏度常數(shù)α=2.6,如圖6所示。
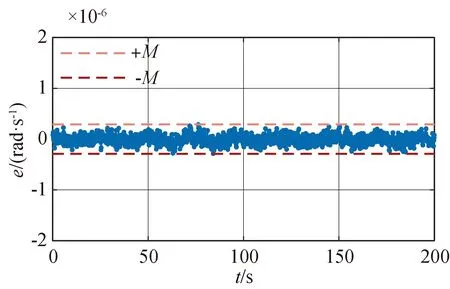
圖6 當(dāng)α=2.6時(shí)預(yù)測(cè)誤差與故障閾值
3.4 故障檢測(cè)
在陀螺輸出無(wú)故障、卡死故障、噪聲故障以及偏差故障情況下,模型預(yù)測(cè)值與真實(shí)值對(duì)比以及預(yù)測(cè)誤差結(jié)果如圖7~9所示。
1)卡死故障發(fā)生時(shí),陀螺儀輸出角速度數(shù)據(jù)不再發(fā)生變化,與前一刻相同,如圖7(a)所示,0~30s輸出正常,30~50s卡死故障發(fā)生,輸出不再變化。基于LSTM網(wǎng)絡(luò)模型的預(yù)測(cè)值未受到卡死故障的影響,故障發(fā)生后,預(yù)測(cè)值正常波動(dòng),且其與真實(shí)值之間出現(xiàn)偏離,導(dǎo)致預(yù)測(cè)誤差逐漸靠近故障閾值,于1.2s后超出,判定故障發(fā)生,如圖7(b)所示。由于無(wú)故障下,陀螺儀輸出近似于正弦波動(dòng),故障發(fā)生時(shí)刻會(huì)影響到預(yù)測(cè)誤差超出閾值所用的時(shí)間,即檢測(cè)時(shí)間,通過(guò)多組實(shí)驗(yàn),檢測(cè)時(shí)間在0.8~2.0s范圍內(nèi);
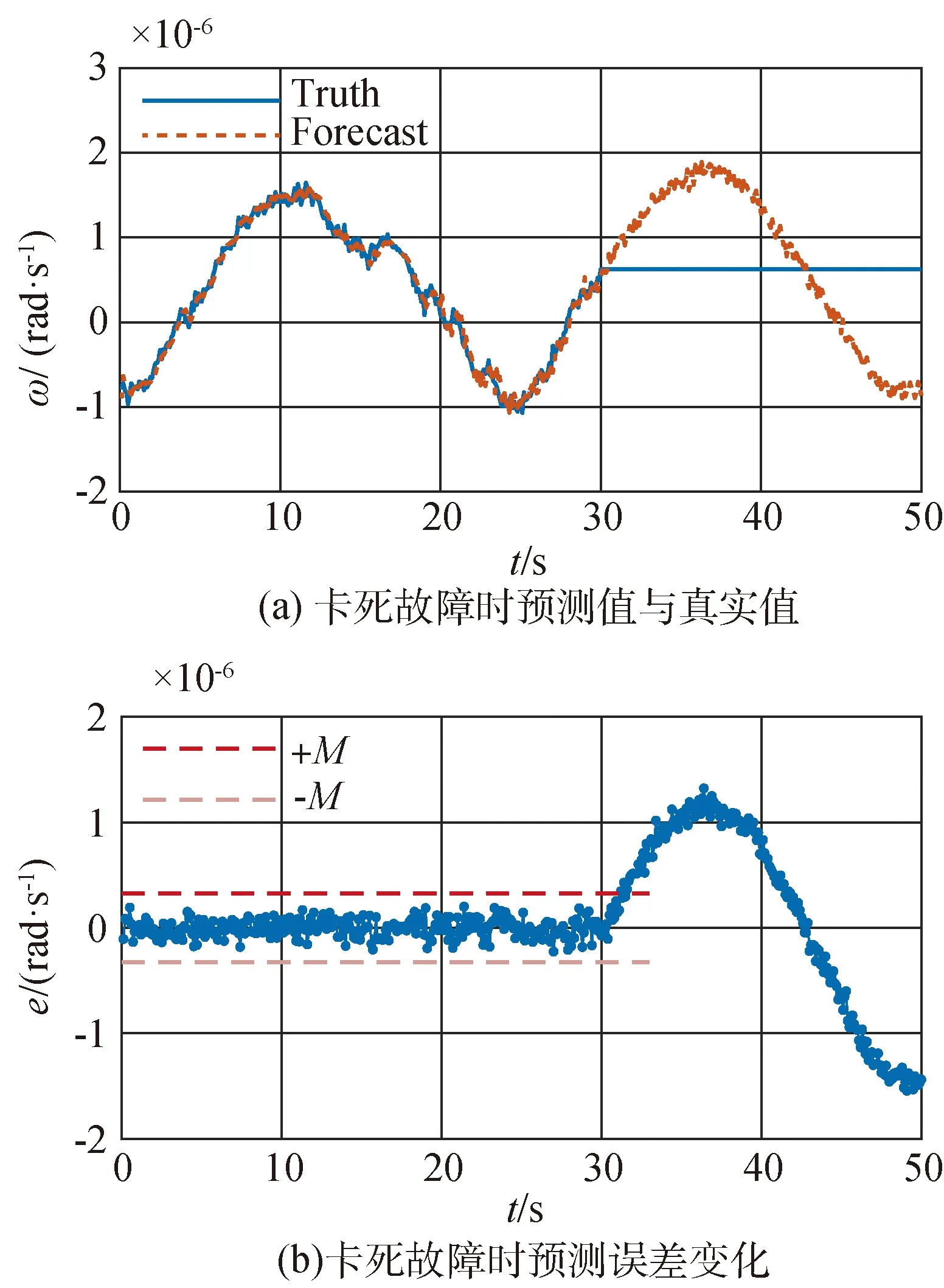
圖7 陀螺儀發(fā)生卡死故障
2)噪聲故障發(fā)生時(shí),陀螺儀輸出角速度數(shù)據(jù)噪聲增大,如圖8(a)所示,0~30s輸出正常,噪聲故障于30~50s間發(fā)生,此時(shí)噪聲故障增益系數(shù)取n=3。雖然基于LSTM網(wǎng)絡(luò)模型的預(yù)測(cè)值與真實(shí)值的趨勢(shì)走向相同,但是由于噪聲故障發(fā)生,預(yù)測(cè)誤差波動(dòng)范圍發(fā)生變化,預(yù)測(cè)誤差便迅速超出故障閾值,判定故障發(fā)生,如圖8(b)所示;
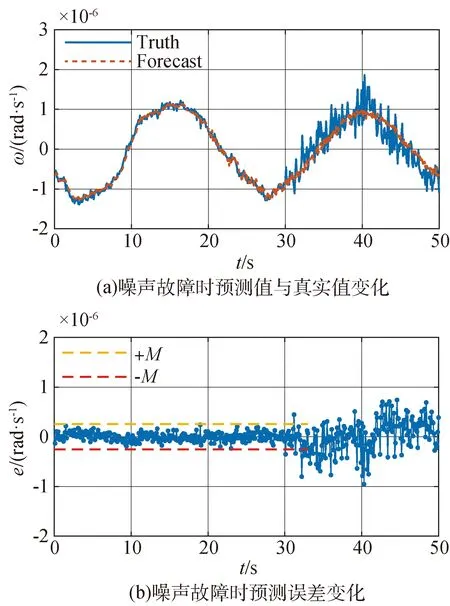
圖8 陀螺儀發(fā)生噪聲故障
3)偏差故障發(fā)生時(shí),陀螺儀輸出角速度數(shù)據(jù)有較大的突變,如圖9(a)所示,0~30s輸出正常,30~50s偏差故障發(fā)生,此時(shí)故障信號(hào)取Δω=1.5×10-6rad/s。故障發(fā)生后,模型預(yù)測(cè)值未受到偏差突變的影響,預(yù)測(cè)值正常波動(dòng),而由于偏差的存在,預(yù)測(cè)誤差迅速超出故障閾值,判定故障發(fā)生,如圖9(b)所示。

圖9 陀螺儀發(fā)生偏差故障
綜上,基于LSTM神經(jīng)網(wǎng)絡(luò)的陀螺儀故障檢測(cè)模型,針對(duì)陀螺儀卡死故障、噪聲故障以及偏差故障均能完成故障檢測(cè)。同時(shí),分別對(duì)3種故障數(shù)據(jù)進(jìn)行多組測(cè)試,統(tǒng)計(jì)模型的準(zhǔn)確率,結(jié)果如表1所示。針對(duì)陀螺儀的3種故障類型都能完成檢測(cè),該方法在總體實(shí)驗(yàn)樣本達(dá)到98.9%的準(zhǔn)確率。

表1 不同故障下模型檢測(cè)準(zhǔn)確率
4 結(jié)論
基于LSTM神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)了衛(wèi)星陀螺儀故障檢測(cè)方法,包括對(duì)LSTM網(wǎng)絡(luò)的訓(xùn)練、不同網(wǎng)絡(luò)對(duì)比、故障閾值選取以及故障檢測(cè)等內(nèi)容。實(shí)驗(yàn)結(jié)果表明:
1)與相同結(jié)構(gòu)的ANN、FNN以及RNN網(wǎng)絡(luò)相比,通過(guò)對(duì)比預(yù)測(cè)誤差的RMSE大小,得出LSTM網(wǎng)絡(luò)對(duì)陀螺儀輸出數(shù)據(jù)學(xué)習(xí)預(yù)測(cè)效果更優(yōu);
2)選擇合適的故障閾值之后,LSTM模型能在2s內(nèi)檢測(cè)出陀螺儀卡死故障、噪聲故障以及偏差故障,并且總體的準(zhǔn)確率達(dá)到98.9%。
當(dāng)前本文完成陀螺儀故障檢測(cè),未來(lái)將進(jìn)一步利用不同故障間的預(yù)測(cè)誤差特征實(shí)現(xiàn)故障隔離。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12