過(guò)驅(qū)動(dòng)衛(wèi)星姿態(tài)動(dòng)態(tài)控制分配研究
2023-03-13 02:47:40謝方圓張愛(ài)民
航天控制 2023年1期
謝方圓 張愛(ài)民
1. 中國(guó)人民解放軍63766部隊(duì),西雙版納 666200 2. 西安交通大學(xué)電子與信息學(xué)部,西安 710049
0 引言
衛(wèi)星運(yùn)行在復(fù)雜多變的太空環(huán)境中,不僅面臨來(lái)自外界的各類干擾影響,還可能由于外界或內(nèi)部的原因出現(xiàn)各種故障,進(jìn)而對(duì)功能造成影響。在衛(wèi)星在軌期間的各類故障中,執(zhí)行機(jī)構(gòu)發(fā)生故障的比例很高,而且對(duì)衛(wèi)星姿態(tài)造成的影響很大。為了提高衛(wèi)星對(duì)執(zhí)行機(jī)構(gòu)故障的容錯(cuò)能力,現(xiàn)代衛(wèi)星往往采用3個(gè)以上的反作用飛輪構(gòu)成冗余執(zhí)行機(jī)構(gòu)。那么一個(gè)控制需求會(huì)有多種可行的執(zhí)行機(jī)構(gòu)分配方案,這就引出了控制分配問(wèn)題。
針對(duì)過(guò)驅(qū)動(dòng)衛(wèi)星的控制分配問(wèn)題,傳統(tǒng)的偽逆分配法,其本質(zhì)上是固定分配,不能充分利用執(zhí)行器冗余的優(yōu)勢(shì)[1]。動(dòng)態(tài)控制分配(Dynamic Control Allocation, DAC)在故障時(shí)根據(jù)約束條件和最優(yōu)化目標(biāo)將虛擬控制力矩重新進(jìn)行分配,使執(zhí)行機(jī)構(gòu)最終輸出的控制力矩盡可能與虛擬控制力矩一致[2]。提高了控制過(guò)程的精確度、系統(tǒng)對(duì)執(zhí)行機(jī)構(gòu)故障的容錯(cuò)能力,進(jìn)而延長(zhǎng)衛(wèi)星在軌壽命。如文獻(xiàn)[3]中針對(duì)空天飛行器再入過(guò)程異類冗余執(zhí)行機(jī)構(gòu)的復(fù)合控制分配問(wèn)題,設(shè)計(jì)了基于二次規(guī)劃的按需動(dòng)態(tài)分配律,實(shí)現(xiàn)了姿態(tài)準(zhǔn)確跟蹤。文獻(xiàn)[4]在過(guò)驅(qū)動(dòng)衛(wèi)星姿態(tài)控制中應(yīng)用基于負(fù)載均衡的控制分配方法,優(yōu)化了推力分配布局,延長(zhǎng)了執(zhí)行機(jī)構(gòu)使用壽命。
相對(duì)于被動(dòng)容錯(cuò)方法,采用DAC可以無(wú)需設(shè)計(jì)過(guò)于復(fù)雜的控制器,以提供對(duì)飛輪故障的魯棒性,而是通過(guò)DAC方法進(jìn)行處理;相對(duì)于主動(dòng)容錯(cuò)方法,不需要重構(gòu)控制器[5],也會(huì)相應(yīng)的使控制方法的設(shè)計(jì)復(fù)雜度降低。所以,將簡(jiǎn)單的控制器和DAC結(jié)合,是針對(duì)飛輪故障的一種有效的姿態(tài)控制設(shè)計(jì)方法。但在以往的文獻(xiàn)中,應(yīng)用動(dòng)態(tài)控制分配方法時(shí),將權(quán)值矩陣對(duì)角線元素設(shè)置為最大限幅值倒數(shù),并沒(méi)有將飛輪故障的影響考慮在內(nèi)。本文考慮飛輪故障,重新設(shè)計(jì)了對(duì)角權(quán)值矩陣的計(jì)算方法。
另外,無(wú)論何種執(zhí)行機(jī)構(gòu),都存在由于物理限制存在輸出力矩和轉(zhuǎn)速的上限。在要求的力矩或轉(zhuǎn)速超過(guò)上限時(shí),執(zhí)行機(jī)構(gòu)就無(wú)法跟隨控制命令,造成實(shí)際輸出的力矩和要求之間存在誤差,即執(zhí)行機(jī)構(gòu)發(fā)生了飽和。但一些文獻(xiàn)在設(shè)計(jì)控制律時(shí)并沒(méi)有考慮這一點(diǎn)。如文獻(xiàn)[6]中,僅設(shè)計(jì)了控制器,對(duì)于工程實(shí)踐中可能出現(xiàn)的執(zhí)行機(jī)構(gòu)飽和問(wèn)題沒(méi)有加以考慮,缺乏實(shí)踐指導(dǎo)意義。Kenneth提出了解決這一問(wèn)題的兩種方法[7]。其中利用控制效率矩陣(安裝矩陣)零空間特性的修正方法,可以使超出執(zhí)行機(jī)構(gòu)位置和速度限制的分配方案重新落入可行域內(nèi),且保證控制矢量方向不變。
衛(wèi)星發(fā)射過(guò)程中,顛簸可能帶來(lái)結(jié)構(gòu)變形,現(xiàn)代快速響應(yīng)衛(wèi)星安裝矩陣在發(fā)射前可能來(lái)不及校準(zhǔn),這些因素都會(huì)使衛(wèi)星不可避免的存在執(zhí)行機(jī)構(gòu)安裝偏差,往往會(huì)對(duì)控制精度有較大影響。所以高精度的姿態(tài)控制必須考慮執(zhí)行機(jī)構(gòu)存在安裝偏差的問(wèn)題[8-9]。
以上提及的衛(wèi)星姿態(tài)控制中可能出現(xiàn)的問(wèn)題,以往許多文獻(xiàn)中一般只著眼于它們中的一部分,而忽略了其他部分,沒(méi)有綜合考慮。雖然設(shè)計(jì)的控制方法對(duì)其他未考慮的問(wèn)題可能有一定的控制效果,但缺乏理論支撐和仿真驗(yàn)證。也有少量的文獻(xiàn)將以上問(wèn)題綜合考慮[10],但控制器設(shè)計(jì)過(guò)程復(fù)雜,不利于實(shí)際工程應(yīng)用。
本文綜合考慮不確定干擾、飛輪安裝偏差、故障以及飽和,結(jié)合滑模控制和動(dòng)態(tài)控制分配,利用零空間法處理飛輪的飽和問(wèn)題。仿真結(jié)果證明,本文提出的控制方法對(duì)上述問(wèn)題有良好的控制效果。
1 衛(wèi)星姿態(tài)模型
1.1 衛(wèi)星姿態(tài)方程
采用四元數(shù)描述的衛(wèi)星姿態(tài)動(dòng)力與運(yùn)動(dòng)學(xué)方程為:
(1)
(2)
(3)
式中:J∈R3為衛(wèi)星慣量矩陣;we表示本體系Β相對(duì)于期望系Ο的誤差角速度;有
(4)

(5)
假設(shè)1.干擾力矩d有界,即滿足‖d‖≤λ。其中:‖·‖表示(·)的2-范數(shù),λ>0為正常數(shù)。
假設(shè)2.角速度w和姿態(tài)四元數(shù)qv均可通過(guò)直接測(cè)量或間接計(jì)算得到。
1.2 飛輪結(jié)構(gòu)與故障分析
1.2.1 飛輪安裝偏差分析
記執(zhí)行機(jī)構(gòu)的數(shù)量為m>3,執(zhí)行機(jī)構(gòu)產(chǎn)生的力矩向量為v=[v1v2…vm]T。衛(wèi)星的控制力矩u=[u1u2…un]T(n=3),由反作用飛輪通過(guò)安裝矩陣D提供:
un×1=Dn×mvm×1
(6)
考慮航天器反作用飛輪存在安裝偏差ΔD,設(shè)標(biāo)稱部分為D0,即有:
D=D0+ΔD
(7)

1.2.2 飛輪故障分析
飛輪效率矩陣為F=diag(f1,f2,…,fm),其中fi(i=1,2,…,m)∈[0,1]表示每個(gè)飛輪的故障系數(shù),fi=1表示飛輪正常,fi∈(0,1)表示飛輪效率降低,fi=0表示完全失效。記vc為飛輪的輸入指令。飛輪實(shí)際輸出v的表達(dá)式如下:
v=Fvc
(8)
假設(shè)4.F已經(jīng)準(zhǔn)確檢測(cè)或估計(jì)到,其估計(jì)誤差本文不做討論。
1.2.3 飛輪飽和分析
定義飛輪在物理限制下可以輸出控制力矩的范圍為:vmin≤v≤vmax,速度的范圍為:ηmin≤η≤ηmax。設(shè)采樣時(shí)間為T,綜上,在某一時(shí)刻t飛輪輸出力矩范圍可表示為:
(9)
(10)
這使得位置和速率的雙重約束轉(zhuǎn)化為單位計(jì)算周期內(nèi)的位置約束問(wèn)題。
1.3 問(wèn)題陳述
綜上,本文研究的問(wèn)題可以描述為:在衛(wèi)星姿態(tài)控制過(guò)程中,考慮存在不確定干擾以及飛輪安裝偏差的情況下,當(dāng)飛輪出現(xiàn)故障以及飽和時(shí),設(shè)計(jì)怎樣的控制方案,能使衛(wèi)星姿態(tài)系統(tǒng)仍能穩(wěn)定運(yùn)行。
2 控制器設(shè)計(jì)與穩(wěn)定性分析
首先考慮在衛(wèi)星存在不確定干擾和飛輪安裝偏差的情況下如何設(shè)計(jì)控制律u,使系統(tǒng)漸近穩(wěn)定。
如果使用偽逆法將控制力矩分配到各個(gè)飛輪,則:
(11)
式中:u∈R3為控制模塊計(jì)算得到的所需的控制力矩。將式(6)、(7)和(11)代入式(3)中可得:
(12)
設(shè)計(jì)滑模變量s=we+βe,可得:

(13)
定義
(14)
則
(15)
設(shè)計(jì)Lyapunov函數(shù)
(16)
則
(17)
設(shè)計(jì)控制律
u=-A-ksgn(s)-kss
(18)
式中:k、ks為待確定的正常數(shù)。代入式(17)中:
(19)
式中:sTksgn(s)=k‖s‖,代入式(19)可得
(20)
由假設(shè)1和假設(shè)3可知
(21)
將控制律代入可得

(22)

(23)

控制律中的ks和滑模矢量參數(shù)β的取值如下:
(24)
ts為要求的響應(yīng)時(shí)間,根據(jù)控制任務(wù)需求選取。值得一提的是,在滑模控制的實(shí)際應(yīng)用中,由于慣性、滯后等因素的存在,會(huì)不可避免的產(chǎn)生抖振。使用邊界層法,即用飽和函數(shù)sat(s)代替符號(hào)函數(shù)(開(kāi)關(guān)函數(shù))sgn(s),可以達(dá)到削弱抖振的目的,并提高仿真速率。這里取飽和函數(shù)為:
(25)
并令ε=0.001。
3 動(dòng)態(tài)控制分配策略
從前面的分析可知,僅僅使用偽逆法進(jìn)行力矩分配是無(wú)法應(yīng)對(duì)飛輪故障的。所以這里使用動(dòng)態(tài)控制分配處理飛輪故障。
3.1 優(yōu)化目標(biāo)
動(dòng)態(tài)控制分配問(wèn)題本質(zhì)上是一個(gè)優(yōu)化問(wèn)題,求解它是一個(gè)數(shù)學(xué)規(guī)劃問(wèn)題。選擇l2范數(shù)作為優(yōu)化目標(biāo):

(26)
s.t.
(27)
式中:v(t)∈Rm為所求的飛輪力矩指令,vs(t)∈Rm為期望的穩(wěn)態(tài)飛輪力矩,v(t-T)∈Rm是上一時(shí)刻的飛輪力矩指令,W1和W2為對(duì)角權(quán)值矩陣;u(t)∈Rn為虛擬控制力矩,D0∈Rn×m是安裝矩陣的標(biāo)稱部分,Ω表示飛輪控制力矩的可行域。
文獻(xiàn)[11]中將W1矩陣對(duì)角線元素設(shè)置為最大限幅值倒數(shù),但這種方法并沒(méi)有將飛輪故障的影響考慮在內(nèi)。事實(shí)上,當(dāng)星上故障檢測(cè)系統(tǒng)已經(jīng)發(fā)現(xiàn)某飛輪存在故障,則應(yīng)增大W1對(duì)應(yīng)的對(duì)角線值,使分配時(shí)盡量減少使用該飛輪。根據(jù)這兩個(gè)方面的要求,本文將文獻(xiàn)中的方法加以改進(jìn),將W1對(duì)角線元素設(shè)置為:
(28)
3.2 求解
在不考慮飽和影響的情況下,優(yōu)化問(wèn)題變?yōu)椋?/p>

(29)
s.t.
D0v(t)=u(t)
(30)
根據(jù)文獻(xiàn)[12],可得優(yōu)化問(wèn)題的解為:
v(t)=Evs(t)+Fv(t-T)+Gu(t)
(31)
(32)
4 零空間法
采用零空間法處理飛輪飽和。
安裝矩陣D∈Rn×m,存在一組m-n個(gè)m維正交向量,它們構(gòu)成了Rm上D的零空間的一組基。將這組向量組成的矩陣記為N∈Rm×(m-n),即滿足DN=0,則DNx=0,?x∈Rm-n,記vm=Nx。向量vp滿足Dvp=u,則向量v=vp+vm有下式成立:
u=Dv=D(vp+vm)=Dvp+DNx+
Dvp+0·x=Dvp=u
(33)
式(33)說(shuō)明若初始解vp加上一個(gè)由D的零空間基組成的向量vm,等式仍成立。所以,基于零空間控制分配方法就應(yīng)用了這一思路:給定了初始解vp,滿足Dvp=u,在vp?Ω時(shí),尋找x,使得v=vp+vm=vp+Nx∈Ω成立。
若經(jīng)過(guò)計(jì)算后得到的v滿足了所有分量未超出約束范圍,則將修正結(jié)果輸出到執(zhí)行機(jī)構(gòu),若還存在超出約束范圍的分量,則重復(fù)以上的修正過(guò)程。值得注意的是,以上方法存在多次迭代仍不能使所有分量都落入約束范圍內(nèi)的情況,這時(shí)需要設(shè)定一個(gè)最大迭代次數(shù),若仍有超出約束范圍的分量,就將其置于極限值后停止修正,這時(shí)輸出的執(zhí)行機(jī)構(gòu)命令雖然無(wú)法合成要求的控制量,但避免了多次迭代浪費(fèi)寶貴的控制時(shí)間。
5 仿真校驗(yàn)
5.1 仿真實(shí)驗(yàn)
設(shè)衛(wèi)星的轉(zhuǎn)動(dòng)慣量矩陣:
J0=diag(6.292,9.650,5.477)kg·m2
(34)
設(shè)系統(tǒng)初始姿態(tài)角為θ0=[10 10 10]o或θ0=[45 45 45]o兩種值。

考慮4個(gè)反作用飛輪按照αi=35.25°,βi=45°(i=1,2,3,4)的標(biāo)稱安裝角安裝于衛(wèi)星上。則由文獻(xiàn)[13]可知
(35)
外干擾在三個(gè)通道上均設(shè)置為:
uf=0.0005sin(0.1t)N·m
存在安裝偏差角Δαi,Δβi。仿真中Δαi(i=1,2,3,4)在[-4.5° 4.5°]之間隨機(jī)選擇,Δβi(i=1,2,3,4)在[-5.5° 5.5°]之間隨機(jī)選擇。
仿真中的飛輪故障設(shè)置為某飛輪完全失效,其他飛輪能正常運(yùn)轉(zhuǎn),既在仿真中對(duì)應(yīng)的飛輪效率矩陣的對(duì)角線元素為0。設(shè)置飛輪最大位置限制為±0.25N·m,轉(zhuǎn)速最大限制為0.03N·m/s。取ts=60s。設(shè)計(jì)以下3種條件:
仿真1:初始姿態(tài)角[10° 10° 10°],未發(fā)生飽和,3號(hào)飛輪完全失效。仿真結(jié)果如圖1~2所示。
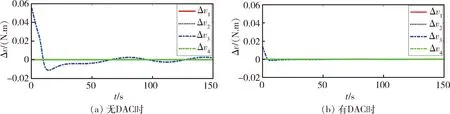
圖1 飛輪指令與實(shí)際產(chǎn)生的力矩差
仿真2:初始姿態(tài)角[45° 45° 45°],發(fā)生了飽和,飛輪正常。仿真結(jié)果如圖3所示。
仿真3:初始姿態(tài)角[45° 45° 45°],發(fā)生了飽和,且2號(hào)飛輪完全失效。仿真結(jié)果如圖4所示。
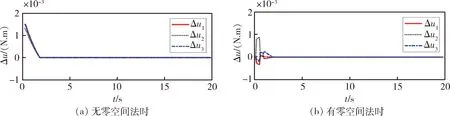
圖2 虛擬力矩與實(shí)際輸出力矩差
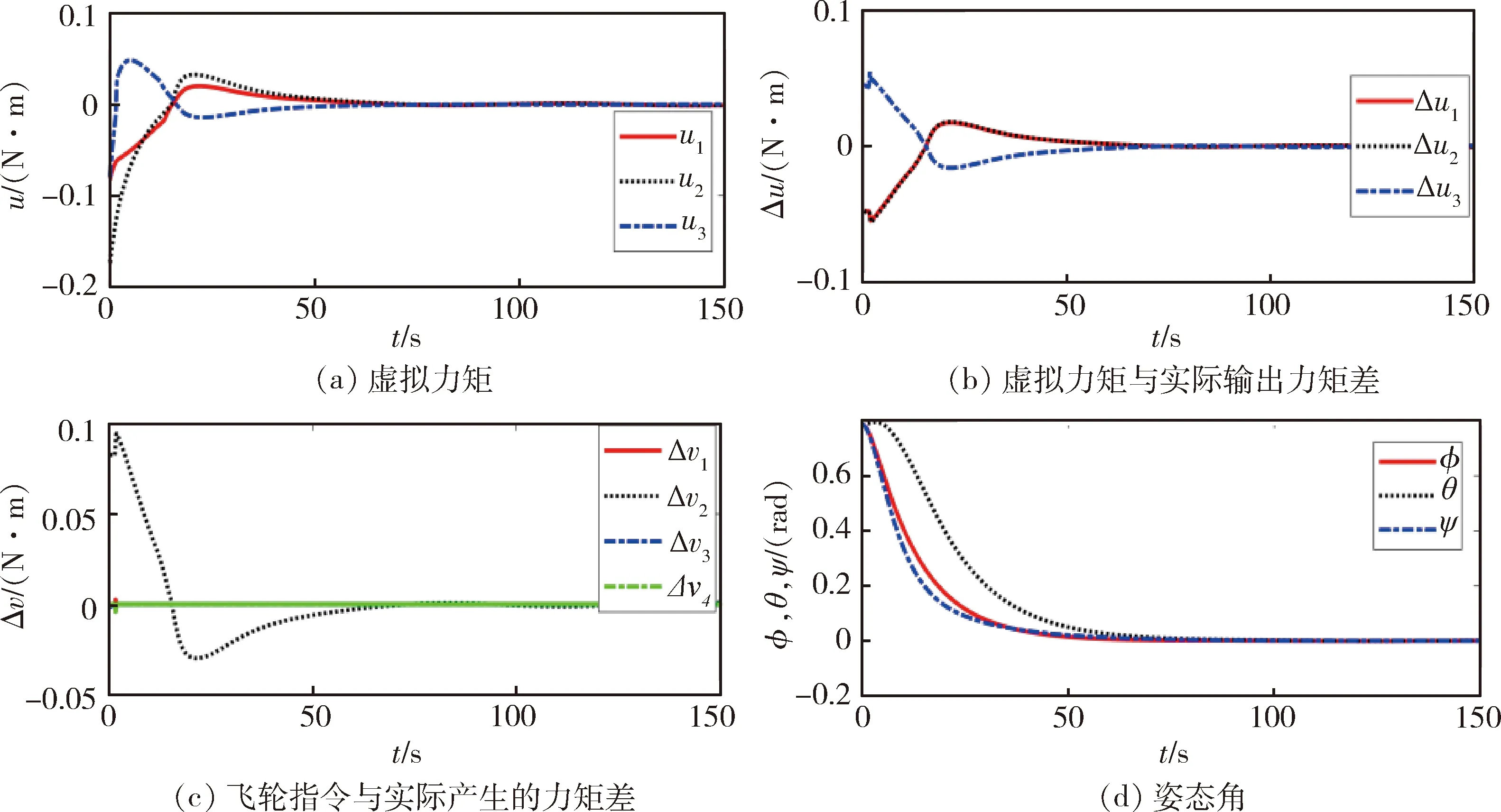
圖3 無(wú)DAC,無(wú)零空間法仿真結(jié)果
圖4 有DAC,有零空間法仿真結(jié)果
5.2 結(jié)果分析
通過(guò)對(duì)比仿真1中的兩組實(shí)驗(yàn)結(jié)果,發(fā)現(xiàn)在同樣的控制目標(biāo)下,相對(duì)于無(wú)DAC時(shí),有DAC時(shí)飛輪更好地跟蹤了力矩指令,且穩(wěn)態(tài)不存在波動(dòng)。這是由于無(wú)DAC時(shí),違逆法仍然將控制力矩按照安裝矩陣的偽逆分配給3號(hào)飛輪較大的力矩,但此飛輪無(wú)法響應(yīng),導(dǎo)致其輸出和指令之間的差Δv很大,相應(yīng)的會(huì)造成較大的Δu。有DAC時(shí),失效飛輪對(duì)應(yīng)的W1矩陣對(duì)角線元素增大,抑制了向3號(hào)飛輪分配較大的力矩,所以,使Δv減小,降低了分配誤差。
通過(guò)對(duì)比仿真2中的兩組實(shí)驗(yàn)結(jié)果,發(fā)現(xiàn)有零空間法時(shí),Δu三個(gè)分量的絕對(duì)值都有所減低,證明了零空間法對(duì)飽和影響的抑制作用。這是由于發(fā)生飽和時(shí),無(wú)零空間法時(shí),超出飛輪限制的力矩會(huì)被直接置于飽和值,不做其他處理,造成合成的力矩存在誤差;有零空間法時(shí),首先將超出限制的分量置于飽和值,再根據(jù)算法計(jì)算剩余的分量,循環(huán)一定次數(shù),輸出調(diào)整后的值。相當(dāng)于將飽和的分量超限部分讓剩余未飽和的分量分擔(dān),從而降低了控制誤差。
在仿真 3中,在干擾、偏差、失效、飽和共同存在時(shí),設(shè)計(jì)的控制方法仍能有良好的穩(wěn)態(tài)性能,說(shuō)明了設(shè)計(jì)的控制律的有效性;對(duì)比圖3和圖4兩組實(shí)驗(yàn)結(jié)果,發(fā)現(xiàn)當(dāng)失效和飽和同時(shí)存在時(shí),在DAC和零空間的共同作用下,Δv和Δu都明顯降低,使得控制過(guò)程得到了改善。所以本文設(shè)計(jì)的控制方法不僅能使系統(tǒng)最終趨于穩(wěn)定,還能改善系統(tǒng)的控制過(guò)程,有效應(yīng)對(duì)本文中的姿態(tài)控制問(wèn)題。
6 結(jié)論
研究了不確定干擾、飛輪安裝偏差、故障、飽和同時(shí)存在時(shí)的衛(wèi)星姿態(tài)控制問(wèn)題。首先針對(duì)衛(wèi)星姿態(tài)在不確定干擾和飛輪存在安裝偏差時(shí)設(shè)計(jì)滑模控制律,并驗(yàn)證了其穩(wěn)定性;而后分別應(yīng)用動(dòng)態(tài)控制分配和零空間法處理飛輪故障和飽和。最后設(shè)計(jì)對(duì)比仿真,仿真結(jié)果與預(yù)期一致,證明了設(shè)計(jì)的控制方法對(duì)本文中的姿態(tài)控制問(wèn)題的有效性。并且在降低穩(wěn)態(tài)和動(dòng)態(tài)誤差方面都取得了一定的效果。本文設(shè)計(jì)的控制方法避免了復(fù)雜的控制器設(shè)計(jì)過(guò)程,適應(yīng)性更廣,更易于工程應(yīng)用。
猜你喜歡
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50