基于速度增量序列凸化的固體運(yùn)載火箭制導(dǎo)算法
2023-03-13 02:47:30陳之潤趙鵬雷于煜斌
航天控制 2023年1期
關(guān)鍵詞:模型
陳之潤 鄭 新 趙鵬雷 于煜斌
北京宇航系統(tǒng)工程研究所,北京 100076
0 引言
近年來,隨著微小衛(wèi)星市場的蓬勃發(fā)展,固體運(yùn)載火箭憑借高可靠、快履約、快發(fā)射、低成本等優(yōu)勢迅速占領(lǐng)市場,成為世界航天大國運(yùn)載技術(shù)發(fā)展的重點(diǎn)領(lǐng)域[1]。但不同于液體運(yùn)載火箭推力可調(diào)、隨時關(guān)機(jī)的特性,固體運(yùn)載火箭為提高可靠性、降低成本、增大干質(zhì)比,一般取消推力終止裝置而采用耗盡關(guān)機(jī)制導(dǎo)方式,一方面需進(jìn)行固體發(fā)動機(jī)能量管理,另一方面需考慮發(fā)動機(jī)推力、秒耗量、比沖、關(guān)機(jī)時間等偏差大的問題,這給固體運(yùn)載火箭制導(dǎo)精度帶來了新的挑戰(zhàn)[2]。
目前,針對耗盡關(guān)機(jī)制導(dǎo)算法的研究,以閉路制導(dǎo)算法最為經(jīng)典,該方法以視速度模值為變量,通過閉路制導(dǎo)段、能量管理段和常姿態(tài)導(dǎo)引段實現(xiàn)關(guān)機(jī)點(diǎn)制導(dǎo)精度。文獻(xiàn)[3-5,6]在經(jīng)典閉路制導(dǎo)算法上進(jìn)行改進(jìn),考慮了終端速度管控、引力攝動J2項、需用速度增益曲面以及閉路制導(dǎo)與零射程線結(jié)合等問題。文獻(xiàn)[7-9]針對能量管理算法分別提出了姿態(tài)調(diào)制制導(dǎo)(AEM)、通用能量管理(GEM)、以及樣條能量管理(SEM)等方式,有效降低了終端速度偏差。但是,上述算法對終端多約束問題適應(yīng)性較差,且無法處理過程約束,難以滿足主動段多過程及終端約束制導(dǎo)需求。
另外,有學(xué)者將固體火箭耗盡關(guān)機(jī)制導(dǎo)問題轉(zhuǎn)化為最優(yōu)控制問題[10]進(jìn)行求解,可處理過程及終端約束問題,但多約束的最優(yōu)控制問題難以采用解析法求解,常采用數(shù)值方法求解,受限于求解速度,較少應(yīng)用于彈上制導(dǎo)。近年來,凸優(yōu)化算法由于其求解快速性等優(yōu)點(diǎn),逐漸應(yīng)用于固體火箭耗盡關(guān)機(jī)最優(yōu)控制問題的求解。文獻(xiàn)[11]提出了一種基于改進(jìn)序列凸優(yōu)化的固體火箭制導(dǎo)算法,將滑行時間擴(kuò)展為控制變量,實現(xiàn)了高精度入軌需求,但未考慮高低溫下發(fā)動機(jī)內(nèi)彈道變化;文獻(xiàn)[12-13]利用二階錐規(guī)劃求解運(yùn)載火箭上升段入軌問題,文獻(xiàn)[14]提出了在推力下降時,基于序列凸優(yōu)化的在線重規(guī)劃入軌算法,但文獻(xiàn)[12-14]均為液體火箭發(fā)動機(jī),推力可調(diào)節(jié),無法直接應(yīng)用于采用耗盡關(guān)機(jī)方式的固體運(yùn)載火箭制導(dǎo)。
本文針對上述耗盡關(guān)機(jī)制導(dǎo)方法的不足,提出一種以速度模值增量為變量的固體火箭序列凸化制導(dǎo)算法。主要創(chuàng)新點(diǎn)如下:
1)針對固體火箭發(fā)動機(jī)在高低溫下的內(nèi)彈道(推力、秒耗量、耗盡時間)散布大的特性,提出一種以速度模值增量為變量的序列凸化制導(dǎo)算法,解決了以飛行時間為自變量的序列凸化制導(dǎo)算法精度差且魯棒性低的問題;
2)提出一種以速度模值增量為變量的高低溫內(nèi)彈道修正模型;通過對比速度模值增量在線辨識高低溫工況,以此修正內(nèi)彈道模型,提高了耗盡關(guān)機(jī)的制導(dǎo)精度。
1 問題建模
1.1 運(yùn)動學(xué)與動力學(xué)模型
為保證稠密大氣層內(nèi)飛行時的載荷等約束,固體運(yùn)載火箭助推段第一級或兩級一般采用攝動制導(dǎo),在助推段最后一級及末修級采用閉路制導(dǎo),實現(xiàn)最終的入軌精度要求。由于火箭實施閉路制導(dǎo)的飛行時間較短,在不影響制導(dǎo)精度的前提下,可忽略地球自轉(zhuǎn)的影響。因此,基于非旋轉(zhuǎn)圓球地球模型,建立固體運(yùn)載火箭助推段運(yùn)動學(xué)與動力學(xué)方程如下:
(1)
其中:r為地心距,λ和φ分別為經(jīng)緯度,V為速度,θ為當(dāng)?shù)貜椀纼A角,σ為彈道偏角;α和β為攻角和側(cè)滑角;L、D和Z分別為升力、阻力和側(cè)力;m為質(zhì)量,F(xiàn)為推力,g為引力加速度。上式(1)中動力學(xué)模型可簡記為:

(2)
其中:X(t)=[r,λ,f,V,θ,σ]T,U=[α,β]T。
由于固體運(yùn)載火箭實施閉路制導(dǎo)時已飛出稠密大氣層,氣動力對彈道影響較小,且高超聲速飛行段的氣動特性相對穩(wěn)定,在不影響制導(dǎo)精度的前提下,可對氣動力系數(shù)進(jìn)行多項式擬合,以提升求解速度,插值公式選取如下:
L=L(α,Ma),D=D(α,Ma),Z=Z(β,Ma)
(3)
1.2 最優(yōu)控制問題
固體運(yùn)載火箭耗盡關(guān)機(jī)制導(dǎo)問題主要為滿足地心距、當(dāng)?shù)貜椀纼A角和彈道偏角的約束,以及飛行過程中姿控能力約束,其可轉(zhuǎn)換為控制變量攻角和側(cè)滑角的約束。該問題可轉(zhuǎn)換為如下最優(yōu)控制問題:
(4)
其中:Umax為控制量U(U=[α,β]T)的二范數(shù)約束,θf為耗盡點(diǎn)處目標(biāo)當(dāng)?shù)貜椀纼A角,rf為耗盡點(diǎn)處目標(biāo)地心距,σf為耗盡點(diǎn)處目標(biāo)彈道偏角。
1.3 內(nèi)彈道模型
固體發(fā)動機(jī)內(nèi)彈道模型主要包含發(fā)動機(jī)的推力、室壓和流量等參數(shù)。發(fā)動機(jī)的室壓Pc、推力F和流量qm的理論計算公式如下:
(5)
其中:a為燃速系數(shù),在發(fā)動機(jī)裝藥配方確定下,其主要與高低溫相關(guān);ρ為推進(jìn)劑密度;C*為推進(jìn)劑特征速度;Ab為裝藥燃面,裝藥方案確定后為常量;At為喉部面積;n為壓強(qiáng)指數(shù),通常為常數(shù)。推力系數(shù)CF=ηCFth,η為比沖效率,發(fā)動機(jī)方案確定后為常數(shù);CFth為理論推力系數(shù),與喉部面積相關(guān)。
通過式(5)關(guān)系可知,在發(fā)動機(jī)方案、裝藥配方、裝藥量和飛行彈道等確定后,內(nèi)彈道的室壓、推力和秒耗量模型主要受推進(jìn)劑溫度和喉部燒蝕率影響,將兩種偏差作極限組合,可得高溫、標(biāo)溫和低溫3種內(nèi)彈道模型,其推力模型如圖1所示:
從圖1可知,在實際飛行狀態(tài)下,內(nèi)彈道模型在3種工況下推力模值和耗盡時間偏差很大,由于該偏差無法提前準(zhǔn)確辨識,所以難以保證固體發(fā)動機(jī)耗盡關(guān)機(jī)的制導(dǎo)精度。
針對上述問題,考慮到圖1中三種工況下推力曲線與X軸圍成面積偏差較小,即不同工況下推力速度模值增量基本相等,故本文提出以推力速度模值增量替代傳統(tǒng)的飛行時間為自變量,建立新的動力學(xué)模型,并在實際飛行中,通過對比速度增量模值與高低溫三種工況下的預(yù)示模值,在線修正當(dāng)前內(nèi)彈道模型,最后采用序列凸優(yōu)化算法求解該最優(yōu)控制問題。
2 模型轉(zhuǎn)換
2.1 動力學(xué)轉(zhuǎn)換
根據(jù)固體發(fā)動機(jī)預(yù)示的內(nèi)彈道模型,建立速度模值增量E(即推力產(chǎn)生的加速度模值積分)的動力學(xué)模型如下:
(6)
其中:m為質(zhì)量,F(xiàn)(t)為預(yù)示的內(nèi)彈道推力,qm(t)為預(yù)示的內(nèi)彈道秒耗量。由于內(nèi)彈道推力F(t)大于0,可知速度模值增量E為單調(diào)遞增。

(7)
為減小耗盡時間偏差對制導(dǎo)精度的影響,本節(jié)提出將方程(1)中的自變量時間t替換為速度模值增量E,修正后的模型如下:
(8)

(9)
其中:X(E)=[r,λ,f,V,θ,σ]T,U=[α,β]T。
飛行過程中真實推力速度模值增量計算值為:
(10)

2.2 內(nèi)彈道模型修正
考慮工程實踐,將理論上發(fā)動機(jī)溫度的連續(xù)性辨識問題轉(zhuǎn)換為三分類(高溫、標(biāo)溫、低溫)的離散辨識問題。本節(jié)提出在飛行前裝訂式(7)的內(nèi)彈道預(yù)示模型,通過式(7)中飛行時間與速度模值增量的函數(shù),可得當(dāng)前速度增量下高溫、標(biāo)溫、低溫內(nèi)彈道的飛行時間,通過對比飛行時間修正發(fā)動機(jī)內(nèi)彈道模型。內(nèi)彈道修正模型如下所示:
F(E)=
(11)
(12)
qm(E)=
(13)

2.3 最優(yōu)控制問題轉(zhuǎn)換
通過上述轉(zhuǎn)換,可將式(4)中最優(yōu)控制問題轉(zhuǎn)換為如下最優(yōu)控制問題:
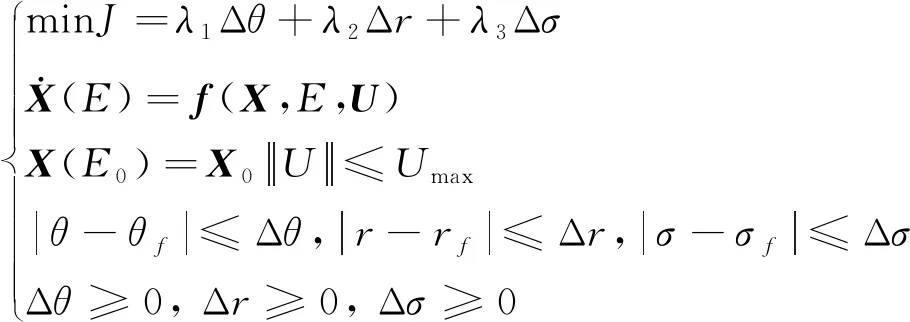
(14)
其中:Umax為控制量U的二范數(shù)約束,θf為耗盡點(diǎn)處目標(biāo)當(dāng)?shù)貜椀纼A角,rf為耗盡點(diǎn)處目標(biāo)地心距,σf為耗盡點(diǎn)處目標(biāo)彈道偏角。
3 序列凸化算法
采用序列凸優(yōu)化算法對式(14)中最優(yōu)控制問題進(jìn)行求解。針對動力學(xué)模型的非凸等式約束,對動力學(xué)模型進(jìn)行線性化處理,可得如下的線性系統(tǒng)方程:
(15)
為避免初值迭代時不可行問題,引入虛擬控制量w,可將線性系統(tǒng)方程轉(zhuǎn)化為:
(16)
對式(16)采用梯形積分離散化,可得如下離散動力學(xué)方程:
(17)
其中:上角標(biāo)k為第k次迭代,下角標(biāo)i為速度增量模值離散后第i個值。
優(yōu)化目標(biāo)函數(shù)轉(zhuǎn)化為:
(18)

為了提升系統(tǒng)動力學(xué)方程序列凸化的有效性,對迭代狀態(tài)施加信賴域約束,約束形式如下:
(19)

由于式(14)中不等式約束均為凸約束,故最優(yōu)控制問題已轉(zhuǎn)換為凸優(yōu)化問題。
4 仿真驗證
為驗證本文提出制導(dǎo)算法的精度與可靠性,選擇某型固體運(yùn)載火箭的三級飛行段作為本文仿真對象。本節(jié)分別對基于速度增量和基于時間的序列凸優(yōu)化方法進(jìn)行仿真,并對內(nèi)彈道修正前后的制導(dǎo)精度進(jìn)行了對比仿真。
4.1 仿真參數(shù)
以離線規(guī)劃的三級彈道作為初始參考軌跡,氣動系數(shù)按風(fēng)洞試驗數(shù)據(jù)的插值表給出,質(zhì)心位置和轉(zhuǎn)動慣量按質(zhì)量特性插值表給出。
仿真初始參數(shù)分布和關(guān)機(jī)點(diǎn)約束條件如下表所示:
表1 初始值參數(shù)及偏差
表2 關(guān)機(jī)點(diǎn)約束條件
仿真軟件采用Matlab R2017a,凸優(yōu)化求解器采用SDPT3,制導(dǎo)采樣周期為50ms。
4.2 自變量轉(zhuǎn)換對比
本節(jié)仿真中,對比以速度模值增量和以飛行時間為自變量的序列凸優(yōu)化方法的耗盡關(guān)機(jī)處制導(dǎo)精度。仿真中,裝訂標(biāo)溫內(nèi)彈道預(yù)示模型,未采用內(nèi)彈道修正。以速度增量和時間為變量的推力模型如下圖所示:
圖3 推力與飛行時間關(guān)系
從圖2~3可知,耗盡點(diǎn)速度模值增量偏差更小,而耗盡時間偏差更大,且以飛行時間為自變量時,推力與溫度的非線性關(guān)系更強(qiáng),難以修正。
圖2 推力與速度模值增量關(guān)系
在仿真中,由于耗盡點(diǎn)速度模值增量存在偏差,故在高、低溫工況下耗盡點(diǎn)Ef均取標(biāo)溫下的值。
采用基于速度增量的序列凸優(yōu)化制導(dǎo)算法,高度和當(dāng)?shù)貜椀纼A角仿真結(jié)果如下:
圖5 高低溫下當(dāng)?shù)貜椀纼A角仿真曲線
采用基于時間的序列凸優(yōu)化制導(dǎo)算法,高度和當(dāng)?shù)貜椀纼A角仿真結(jié)果如下:
圖6 高低溫下高度
圖7 當(dāng)?shù)貜椀纼A角偏差
從圖4~7中可知,本文基于速度模值增量的序列凸優(yōu)化制導(dǎo)算法在發(fā)動機(jī)耗盡點(diǎn)處的高度和當(dāng)?shù)貜椀纼A角偏差均更小,制導(dǎo)精度更高。

圖4 高低溫下高度仿真曲線
4.3 內(nèi)彈道修正對比
本節(jié)仿真中,對比內(nèi)彈道修正前后的耗盡關(guān)機(jī)點(diǎn)的制導(dǎo)精度。仿真中,裝訂高溫、標(biāo)溫、低溫內(nèi)彈道預(yù)示模型,考慮到高低溫內(nèi)彈道在發(fā)動機(jī)工作下降段難以修正,且下降段時間短,對制導(dǎo)精度影響不大,故在下降段均采用標(biāo)溫內(nèi)彈道模型。修正前后的內(nèi)彈道模型如下圖所示:
圖9 修正后推力與速度增量關(guān)系
圖10 修正前時間對速度增量導(dǎo)數(shù)與速度增量關(guān)系
圖11 修正后時間對速度增量導(dǎo)數(shù)與速度增量關(guān)系
圖12 修正前質(zhì)量與速度增量關(guān)系
從圖8~13可知,內(nèi)彈道預(yù)示模型修正后,可有效降低相對實際內(nèi)彈道的偏差,且易于實際工程應(yīng)用。
圖8 修正前推力與速度增量關(guān)系
考慮內(nèi)彈道高低溫偏差,對三級飛行段初始點(diǎn)質(zhì)量、高度、速度、當(dāng)?shù)貜椀纼A角等進(jìn)行極限拉偏仿真。采用基于視速度增量的序列凸優(yōu)化制導(dǎo)算法,內(nèi)彈道修正前耗盡關(guān)機(jī)點(diǎn)制導(dǎo)偏差如下圖所示:
圖15 修正前關(guān)機(jī)點(diǎn)當(dāng)?shù)貜椀纼A角偏差
采用基于視速度增量的序列凸優(yōu)化制導(dǎo)算法,內(nèi)彈道修正后關(guān)機(jī)點(diǎn)制導(dǎo)偏差如下圖所示:
圖16 修正后關(guān)機(jī)點(diǎn)高度偏差
圖17 修正后關(guān)機(jī)點(diǎn)當(dāng)?shù)貜椀纼A角偏差
從圖14~17中可知,內(nèi)彈道修正前耗盡關(guān)機(jī)點(diǎn)高度最大偏差為550m,當(dāng)?shù)貜椀纼A角最大偏差為0.11°;內(nèi)彈道修正后高度耗盡關(guān)機(jī)點(diǎn)最大偏差為280m,當(dāng)?shù)貜椀纼A角最大偏差為0.1°。可知,修正后耗盡關(guān)機(jī)點(diǎn)高度和當(dāng)?shù)貜椀纼A角偏差顯著降低,故內(nèi)彈道修正方式對制導(dǎo)精度有明顯提高。
圖14 修正前關(guān)機(jī)點(diǎn)高度偏差
5 結(jié)論
針對固體發(fā)動機(jī)在高低溫下的耗盡時間、推力模型和秒耗量散布大的問題,提出了一種以速度模值增量為變量的序列凸優(yōu)化算法,并通過對比速度增量模值,對當(dāng)前內(nèi)彈道模型進(jìn)行在線修正。通過仿真驗證,該算法比以時間為變量的序列凸優(yōu)化算法的制導(dǎo)精度更高,且以速度模值增量為判據(jù)的內(nèi)彈道修正算法能顯著提高制導(dǎo)精度,具有較高的工程應(yīng)用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19