
基于雙觀測器的四旋翼無人機驅動電機矢量控制技術研究
2023-05-23 17:05:39馬曉婧劉向辰
無線互聯科技 2023年6期
關鍵詞:永磁同步電機
馬曉婧 劉向辰


基金項目:2022年甘肅省高等學校創新基金項目,項目名稱:基于DSP+FPGA硬件構架的農林植保雙余度控制無人機的研究與開發;項目編號:2022B-301。
作者簡介:馬曉婧(1987— ),女,甘肅臨夏人,講師,碩士;研究方向:機電一體化。
摘要:無人機在飛行過程中,磁場增強型永磁同步電機容易受到多重低次凸極性諧波的影響以及負載擾動轉矩干擾的問題。針對上述問題,文章提出一種高頻脈振諧波注入轉子位置觀測器結合負載擾動轉矩分段函數滑模觀測器的雙觀測器無人機電機矢量控制策略。文章通過高頻脈振諧波注入轉子位置觀測器,可以有效抑制無人機電機系統中存在的多重低次凸極性諧波的影響,改善電機轉子位置和轉速的估算精度,通過負載擾動轉矩觀測器可以消除電機負載擾動轉矩的干擾。
關鍵詞:永磁同步電機;凸極性諧波;諧波注入;擾動轉矩觀測
中圖分類號:TM341;TP183 文獻標志碼:A
0 引言
民用無人機較常采用的永磁同步電機一般具有內置式磁場增強型結構,該結構采用反凸極設計原理,即(Ld>Lq)。既保證了良好的轉矩輸出能力和輸出效率,又擴大了電機轉速的調速范圍。因此,民用無人機驅動+控制系統采用內置式磁場增強型永磁同步電機更加適應于野外復雜的飛控環境。
為了提高滑模+自適應PMSM控制[1-2]的準確性和穩定性,王澤霖等[3]在“傳統滑模+自適應控制”的理論基礎上混合加入了非奇異快速終端滑模積分函數,提高了系統的收斂性,降低了電機的抖動。為了提高永磁同步電機轉子位置的準確估計,王曉琳等[4]采用自適應基準鎖相環[5],通過誤差重構并且以電流最小為目標,自適應調節鎖相環的鎖相基準參數值,實現位置誤差信號的準確補償,解決了無人機飛控系統中溫度、轉子位置和轉矩等傳感器信號繁雜、觀測誤差大的問題。
本文在以上研究的基礎上,提出一種高頻脈振諧波注入轉子位置觀測器結合負載擾動轉矩分段函數滑模觀測器的無人機雙觀測器電機矢量控制策略。該策略改善了轉子位置和轉速的估算精度,消除了負載擾動轉矩的干擾,提高了無人機飛行的穩定性。
1 高頻脈振諧波注入轉子位置觀測器
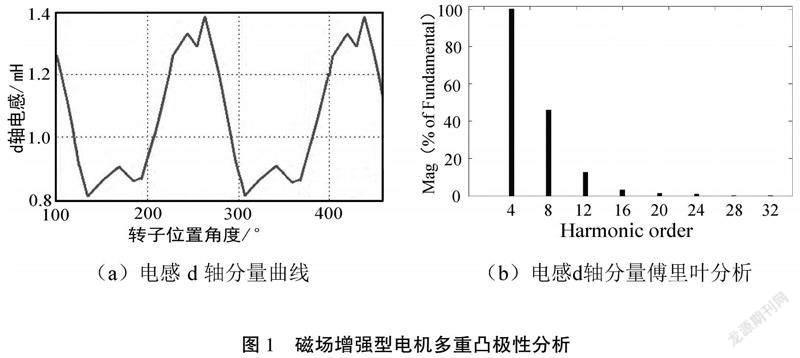
由于磁場增強型電機轉子結構的影響,電機存在多重低次凸極性。多重低次凸極性會產生多重電流高頻信號的疊加,使得無人機在飛行過程中,永磁同步電機驅動系統的轉子位置和轉速出現估測不準確,特定多重凸極性諧波干擾如下。
從圖1中可以看出,定子d軸電感并不是標準的正弦波,而是多種低次諧波分量的疊加耦合,由于電機的極對數p=4,因此+2ωe,+3ωe和+4ωe等低次諧波的影響較為嚴重。
由于多重低次凸極性諧波的影響會降低轉子位置的觀測精度,所以需要對其進行有效抑制。
基于高頻脈振諧波注入轉子位置觀測器原理如圖2所示。
通過高頻脈振諧波注入法的轉子位置觀測器,可以消除多重凸極性低次諧波干擾的問題,得到準確的電機轉子位置。
2 分段函數滑模負載擾動轉矩觀測器
永磁同步電機經典矢量控制技術一般采用基于指數趨近律(s.=-asgn(s)-bs)的滑模觀測器對電機轉矩進行觀測。該觀測方案雖然收斂速度較快,但在滑模面附近容易出現抖振問題。因此,本文采用一種基于分段函數趨近律的滑模觀測器。
從公式(1)可以看出,當趨近函數遠離滑模面時,趨近函數可以快速收斂于滑模面;當趨近函數在滑模面附近抖動時,趨近函數可以快速接近滑模面,即x→0,f(x)→0。
兩種趨近律的動態運動趨近曲線如圖3所示。
比較圖3(a)和(b)可以看出,指數趨近律趨近速度較快,但在滑模面0處抖振明顯,而分段函數趨近律的運動軌跡更加優異。兩種趨近律的運動曲線如圖4所示。
從圖4中的兩種趨近律的運動曲線可以看出,本文所提出的分段函數趨近律可以快速接近于滑模面并且在滑模面0附近不存在抖振現象,因此其具有更加優異的趨近特性。
3 仿真分析
在Matlab/Simulink軟件下搭建的仿真模型如圖5所示。
仿真參數如下:額定功率650 W,額定電流3.5 A,定子每相電阻3.5 Ω,d軸電感Ld=2.8mH,q軸電感Lq=1.2mH,極對數p=4,開關頻率為10 kHz,計算機軟件下搭建的仿真模型如圖6所示。
為了驗證電機抗干擾能力和電機定子電流的動態穩定性,令電機空載啟動至500 r/min,運行至0.3s時增加負載轉矩5N·m,0.3s后降低至負載轉矩2.5N·m,在此過程中,d、q軸電流波形如圖7所示,電機定子三相電流動態仿真波形如圖8所示。
比較圖7(a)和(b)可以看出,相比PI控制算法,本文所提出的改進型矢量控制算法下的d、q軸電流相應時間縮短且基本不受負載轉矩的干擾。
比較圖8(a)和(b)可以看出,相比傳統PI控制算法,本文所提出的改進型矢量控制算法下的電機定子三相啟動電流降低,進入穩態時間降低,當負載轉矩發生突變時,電機定子三相電流的正弦特性更好。
4 試驗分析
為了驗證仿真理論的正確性和實用性,需要搭建無人機電機控制系統試驗平臺,在進行負載轉矩突變時,對電機轉速動態試驗分析。
在圖9(a)和(b)中,當電機穩定運行至參考給定轉速200 r/min,負載轉矩突增50%,PI控制算法下的電機轉速降低75 r/min,且在100ms后恢復至參考給定轉速;改進型控制算法下的電機轉速降低32 r/min且在54ms后恢復至參考給定轉速。當負載轉矩突降50%,PI控制算法下的電機轉速升高77 r/min且在115ms后恢復至參考給定轉速,改進型控制算法下的電機轉速升高30 r/min且在60ms后恢復至參考給定轉速。
在上述動態過程中,改進型控制算法下的q軸電流抖振明顯低于PI控制算法下的q軸電流抖振。改進型控制算法下的電機實際轉速與觀測轉速基本能夠保持一致,波動幅度較小。
5 結語
本文提出的“無人機轉子位置+轉矩雙觀測器電機矢量控制技術”能夠改善轉子位置和轉速的估算精度,消除負載擾動轉矩的干擾,有效提高了無人機飛控系統的控制精度和抗外界干擾能力。
參考文獻
[1]李娜.基于模糊神經網絡的二自由度主動懸架滑模控制系統設計[J].計算機測量與控制,2021(9):101-104,120.
[2]劉勝,郭曉杰,張蘭勇,等.船舶航速/航向協調自適應滑模容錯控制[J].控制工程,2021(10):1946-1954.
[3]王澤霖,胡啟國.基于改進GWO算法的永磁同步電機滑模MRAS控制[J].汽車安全與節能學報,2021(3):386-394.
[4]王曉琳,劉思豪,顧聰.基于自適應基準鎖相環的高速永磁電機轉子位置誤差全補償方法[J].電工技術學報,2021(20):4308-4317.
[5]盤宏斌,龍海鴻,朱茂琨,等.基于Hilbert變換和預設旋轉頻率的無鎖相環電網同步基準正弦信號檢測方法[J].電工技術學報,2018(10):2345-2353.
(編輯 王永超)
Abstract: The flux-intensifying PMSM is susceptible to the influence of multiple low-order harmonics and load disturbance torque, during the flight of drone. In this paper, a UAV motor vector control strategy of dual-observer based on rotor position observer of high-frequency pulse harmonic injection combined with load disturbance torque observer of piecewise function sliding mode is proposed. This control strategy can effectively suppress the influence of multiple low-order harmonics by the rotor position observer and eliminate the disturbance of load torque by the load disturbance torque observer.
Key words: permanent magnet synchronous motor; convex polarity harmonic; harmonic injection; perturbation torque observation
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
