基于特征融合與HPO-RVM的滾動軸承剩余壽命預(yù)測
2023-10-07 04:37:48栗子旋高丙朋
機床與液壓 2023年17期
栗子旋,高丙朋
(新疆大學(xué)電氣工程學(xué)院,新疆烏魯木齊 830017)
0 前言
滾動軸承作為旋轉(zhuǎn)機械的關(guān)鍵部件,決定著機械設(shè)備能否安全平穩(wěn)運行。在復(fù)雜的運行工況下,隨著服役時間的增加,軸承性能逐步退化,發(fā)生故障甚至導(dǎo)致失效。對滾動軸承的剩余使用壽命(Remaining Useful Life,RUL)進行預(yù)測,可以確定最佳維修點,實現(xiàn)預(yù)測性維護,減少事故的發(fā)生和經(jīng)濟損失,提高設(shè)備的可靠性[1]。
基于數(shù)據(jù)驅(qū)動的滾動軸承剩余壽命預(yù)測技術(shù)的研究包含2個重要方面:運行狀態(tài)的特征提取和剩余壽命預(yù)測模型的建立。特征提取是關(guān)鍵,壽命預(yù)測是目標。良好的特征能夠反映軸承的運行狀態(tài)和退化趨勢,而壽命預(yù)測模型則能夠根據(jù)退化特征挖掘軸承的退化規(guī)律,實現(xiàn)準確地預(yù)測滾動軸承的剩余使用壽命。文獻[2]通過雙樹復(fù)小波重構(gòu)原始信號,得到去噪后的信號,提取相應(yīng)的特征,采用BP網(wǎng)絡(luò)對破碎機轉(zhuǎn)軸進行壽命預(yù)測。文獻[3]提取時域特征描述軸承的退化過程,并采用濾波器進行降噪處理,然后采用優(yōu)化算法得到支持向量回歸的參數(shù),訓(xùn)練多個模型進行軸承壽命預(yù)測。為了能夠更好地描述軸承的退化特征,提取時域、頻域以及時頻域特征共同構(gòu)成特征矩陣。然而多維特征容易導(dǎo)致維數(shù)災(zāi)難。為了兼顧全面反映軸承的運行狀態(tài)和計算效率,對特征矩陣進行降維處理。JENSSEN[4]提出了核熵成分分析(Kernel Entropy Component Analysis,KECA),該算法將原始非線性數(shù)據(jù)經(jīng)過核函數(shù)映射到高維特征空間中,在最大保留原始信息的情況下進行降維融合。
壽命預(yù)測階段,有學(xué)者從軸承初期開始進行壽命預(yù)測[5-6],但是軸承初始運行階段狀態(tài)平穩(wěn),對它進行壽命預(yù)測沒有實際工程意義,并且非退化數(shù)據(jù)的引入將造成壽命預(yù)測的精度下降。文獻[7]采用退化階段前期的數(shù)據(jù)訓(xùn)練模型,然后預(yù)測軸承的剩余使用壽命。文獻[8]采用時變卡爾曼濾波進行壽命預(yù)測,構(gòu)造基于線性和二次函數(shù)的卡爾曼濾波模型,自動適應(yīng)切換濾波模型,以處理軸承的正常運行階段和加速退化階段的監(jiān)測數(shù)據(jù),從而達到有效預(yù)測剩余壽命的目的。
相關(guān)向量機(Relevance Vector Machine,RVM)是在貝葉斯框架下發(fā)展起來的支持向量機的另一種改進形式[9]。該模型結(jié)合了貝葉斯原理、自動相關(guān)決策機制和最大似然等理論[10],能夠處理高維,非線性、小樣本等問題;具有良好的稀疏性、泛化能力和較高的預(yù)測精度,RVM的核函數(shù)不受限于Mercer條件,在核函數(shù)的選擇和構(gòu)建中更為靈活[11]。核函數(shù)在很大程度上決定著RVM模型的預(yù)測性能[12],因此采用獵食者-獵物優(yōu)化(Hunter-Prey Optimization,HPO)算法去尋優(yōu)得到RVM的核參數(shù),該方法主要思想結(jié)合了獵食者向著獵物的方向調(diào)整自己的位置,而獵物則是向著安全的地方調(diào)整自己的位置[13]。
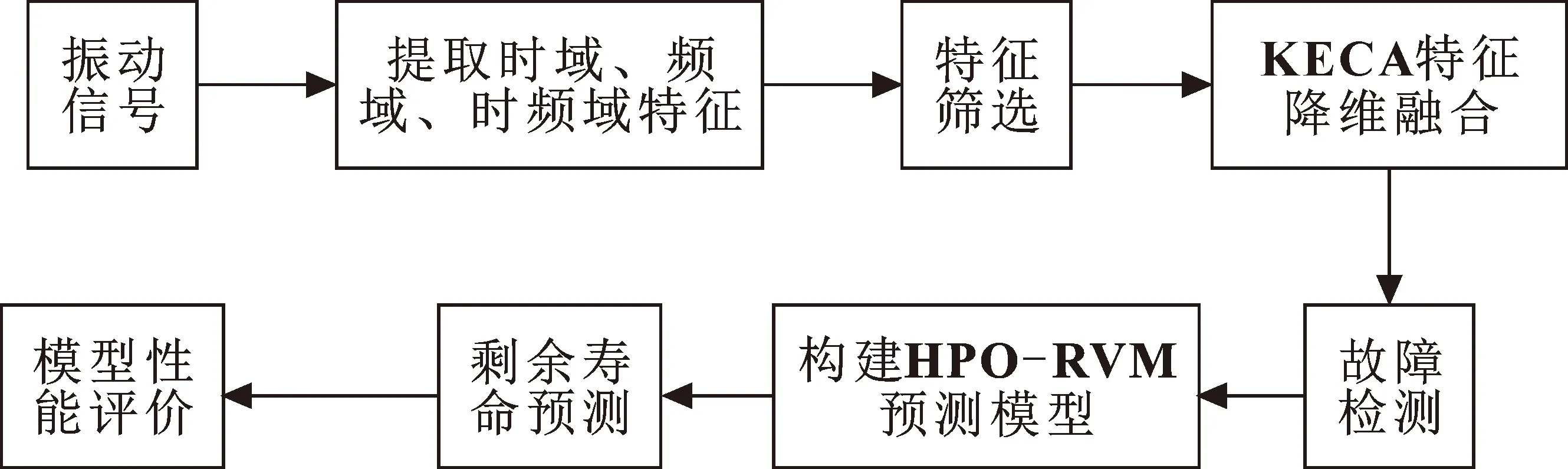
綜上,本文作者提出一種基于特征融合和HPO優(yōu)化RVM的滾動軸承剩余壽命預(yù)測方法。提取多域特征,利用特征篩選和核熵成分分析相結(jié)合,提取軸承的退化狀態(tài)信息。利用HPO優(yōu)化算法自適應(yīng)地確定相關(guān)向量機(Relevance Vector Machine,RVM)的最佳核寬度,通過訓(xùn)練軸承得到壽命預(yù)測模型,將測試軸承的退化特征輸入到模型中,實現(xiàn)軸承的壽命預(yù)測。
1 特征提取和融合
1.1 多域特征提取
1.1.1 時域特征
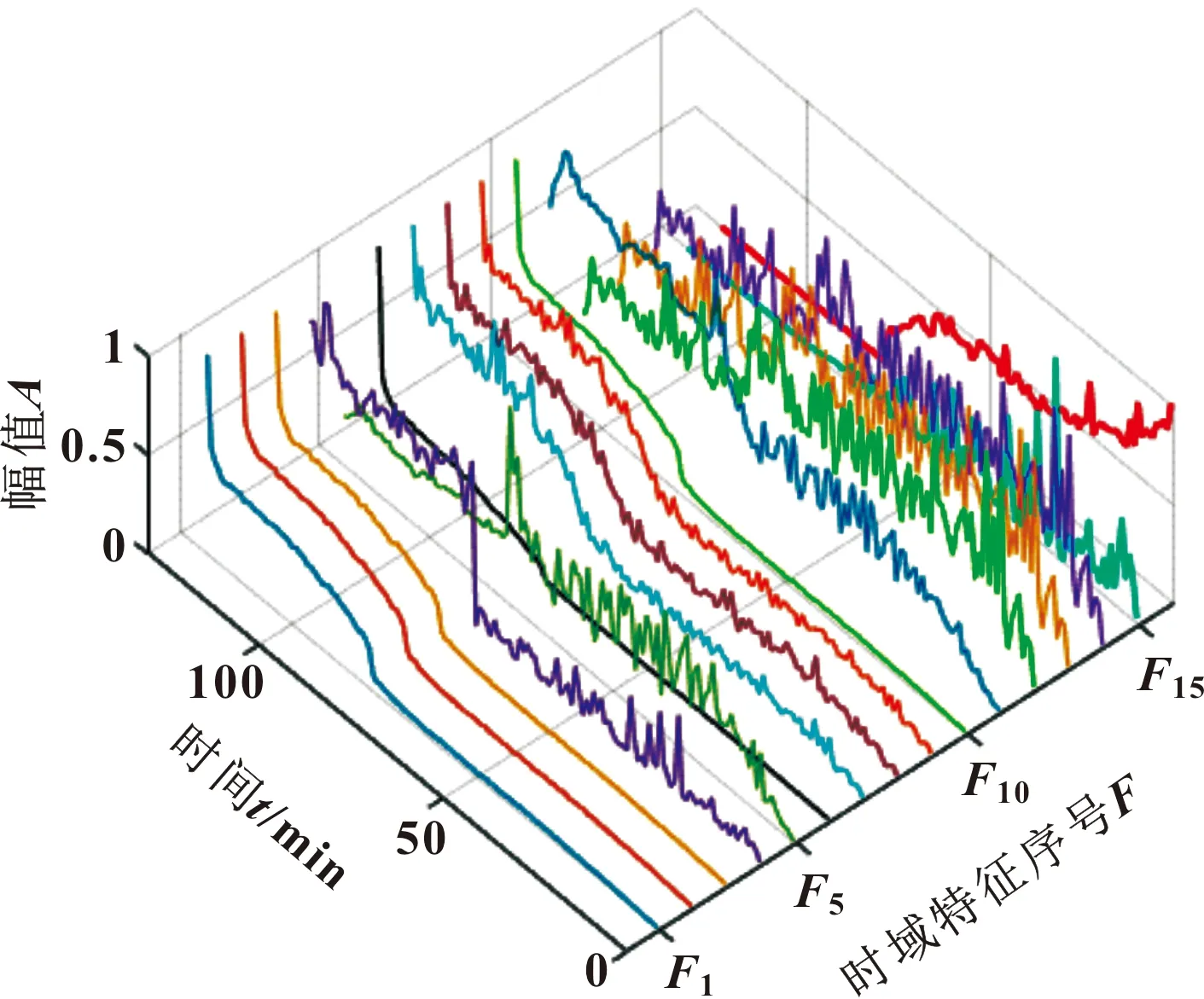
時域特征包括有量綱和量綱一化2種,特征值的大小可以反映設(shè)備的運行狀態(tài),提取均值、方差、均方根、標準差、最大值、最小值、峰峰值、波形指標、峭度指標等16個時域特征,記為F1-F16。
1.1.2 頻域特征
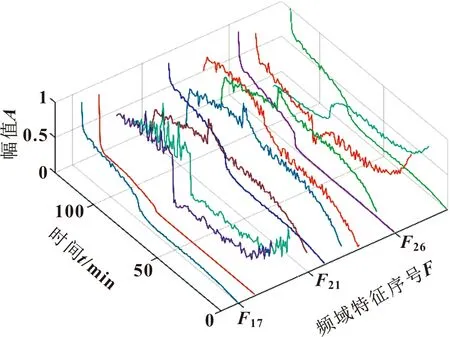
對原始振動信號進行快速傅里葉變換,然后計算相關(guān)的頻域特征,包括頻率均值、頻率標準差、頻率重心等能夠反映頻域振動能量大小、頻譜分散或集中程度以及頻帶位置變化的13個頻域特征。記為F17-F29。
1.1.3 時頻域特征
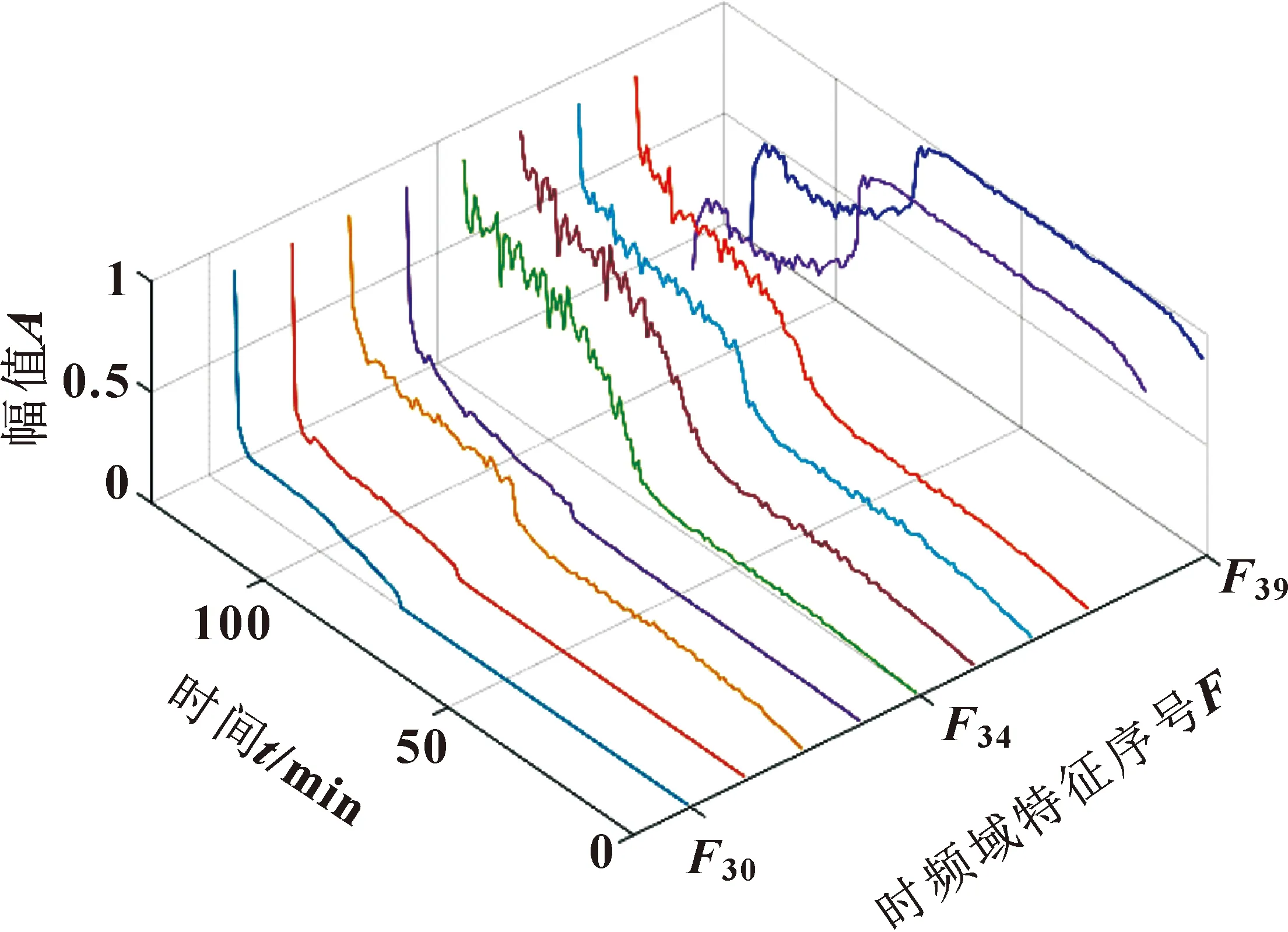
小波包分解是一種時頻域分析方法,可以實現(xiàn)信號的高頻部分和低頻部分同時分解,采用這種分解方式既不會造成信息冗余,也不會造成信息疏漏。計算3層小波包分解的能量熵、奇異譜熵和8個頻帶的能量,共10個特征。記為F30-F39。
1.2 特征篩選
良好的退化特征應(yīng)具有較強的魯棒性和時間相關(guān)性。提取的多個特征并不全都能滿足這2個特性,因此利用魯棒性和相關(guān)性評價指標對特征進行篩選。
魯棒性:反映特征對噪聲或異常值的抗干擾能力,表達式為
(1)
式中:K為樣本個數(shù);XT(tk)是經(jīng)過平滑處理后的趨勢項;XR(tk)是波動項;X(tk)=XT(tk)+XR(tk)。
相關(guān)性:表示特征與時間序列的相關(guān)度,采用Spearman相關(guān)系數(shù),計算公式為
(2)
di=rankXi-rankTi(i=1,…,K)
(3)
式中:X、T分別表示2個時間序列;di代表2個序列變量在排序后的秩差。
由于單個指標只能夠評價特征在某個方面的特性,因此使用自適應(yīng)加權(quán)方法構(gòu)建綜合評價指標:
J=ω1Rob(X)+ω2Cor(X,T)
(4)
式中:ωi為評價指標的權(quán)重。
采用Critic方法自適應(yīng)確定權(quán)重。該方法綜合考慮了指標間的差異性和相關(guān)性,如式(5)所示:
(5)
式中:σj為指標j的方差;ζij為相關(guān)系數(shù)。然后計算權(quán)重,如式(6)所示:
(6)
式中:ωj表示指標j的權(quán)重。
1.3 核熵成分分析
KECA是基于Renyi二次熵和Parzen窗函數(shù)提出來的。Renyi二次熵數(shù)學(xué)形式如式(7)所示:
(7)
式中:p(x)為樣本集D={x1,x2,…,xN}的概率密度函數(shù)。將式(7)中的積分部分定義為
(8)
式(8)可以改寫為以下等式:
(9)
(10)
式中:K為N×N的核矩陣;I是N×1的向量。對K進行特征分解:
K=EDET
(11)
式中:D=diag(λ1,λ2,…,λN);E是特征向量矩陣,E={e1,e2,…,eN}。將式(11)代入式(9)可以得到:
(12)
式中:λi和ei是按照二次熵的估值降序排列得到的。選擇滿足要求的前k個特征值與特征向量進行投影變換可以得到Φeca:
(13)

2 HPO算法優(yōu)化相關(guān)向量機
2.1 相關(guān)向量機
tn=y(xn;w)+εn
(14)
式中:t=(t1,…,tN);w=(w0,…,wN);y(xn;w)為非線性函數(shù);εn為高斯噪聲。假設(shè)tn服從高斯分布:
p(t|x)=N(t|y(x),σ2)
(15)
由貝葉斯定理,數(shù)據(jù)集的似然估計可以寫成:
(16)
式中:Φ是核矩陣;Φnm=K(xn,xm-1),Φn1=1。
根據(jù)貝葉斯規(guī)則獲得權(quán)重的后驗概率:
p(w|t,α,σ2)=(2π)-(N+1)/2|Σ|-1/2·
(17)
Σ=(ΦTBΦ+A)-1
(18)
μ=ΣTBt
(19)
式中:A=diag(α0,α1,…,αN);B=σ-2IN;Σ為后驗方差;μ為均值。
對權(quán)重積分,獲得超參數(shù)邊緣概率分布:
p(t|α,σ2)=(2π)-N/2|B-1+ΦA(chǔ)-1ΦT|-1/2·
(20)
通過迭代計算得到超參數(shù)α和σ2的最優(yōu)解:
(21)
(22)
式中:Σii表示協(xié)方差矩陣Σ中第i個對角元素。
相關(guān)向量機的核函數(shù)主要分為局部核函數(shù)和全局核函數(shù)兩類:局部核函數(shù)學(xué)習能力強,泛化能力弱;全局核函數(shù)泛化能力強,學(xué)習能力弱。采取加權(quán)組合核函數(shù),選取一個全局核函數(shù)多項式核函數(shù)和局部核函數(shù)高斯核函數(shù)進行加權(quán)組合,來提高模型的預(yù)測精度和魯棒性,形式如下:
(23)
2.2 HPO算法原理
獵食者-獵物優(yōu)化算法是于2022年提出的一種新的優(yōu)化算法,具有收斂速度快、尋優(yōu)能力強的特點,并且人工設(shè)置參數(shù)少。
隨機生成種群的初始位置。
xi=rand(1,d)·(ub-lb)+lb
(24)
式中:d為目標個數(shù);ub、lb分別為搜索空間的上邊界和下邊界。
獵食者根據(jù)下式進行搜索:
xi,j(t+1)=xi,j(t)+0.5{[2CZPpos(j)-xi,j(t)]+
[2(1-C)Zμ(j)-xi,j(t)]}
(25)
其中:x(t)為當前獵食者的位置;x(t+1)為獵食者下一個位置;Ppos為獵物的位置;μ為所有位置的平均值;Z是由下式計算的自適應(yīng)參數(shù)。
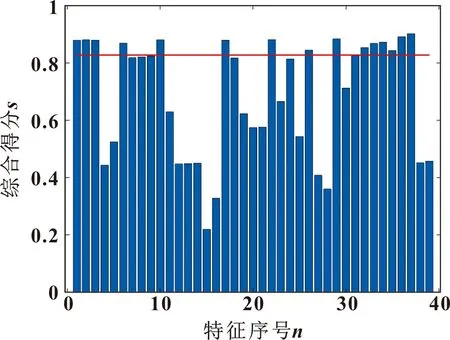
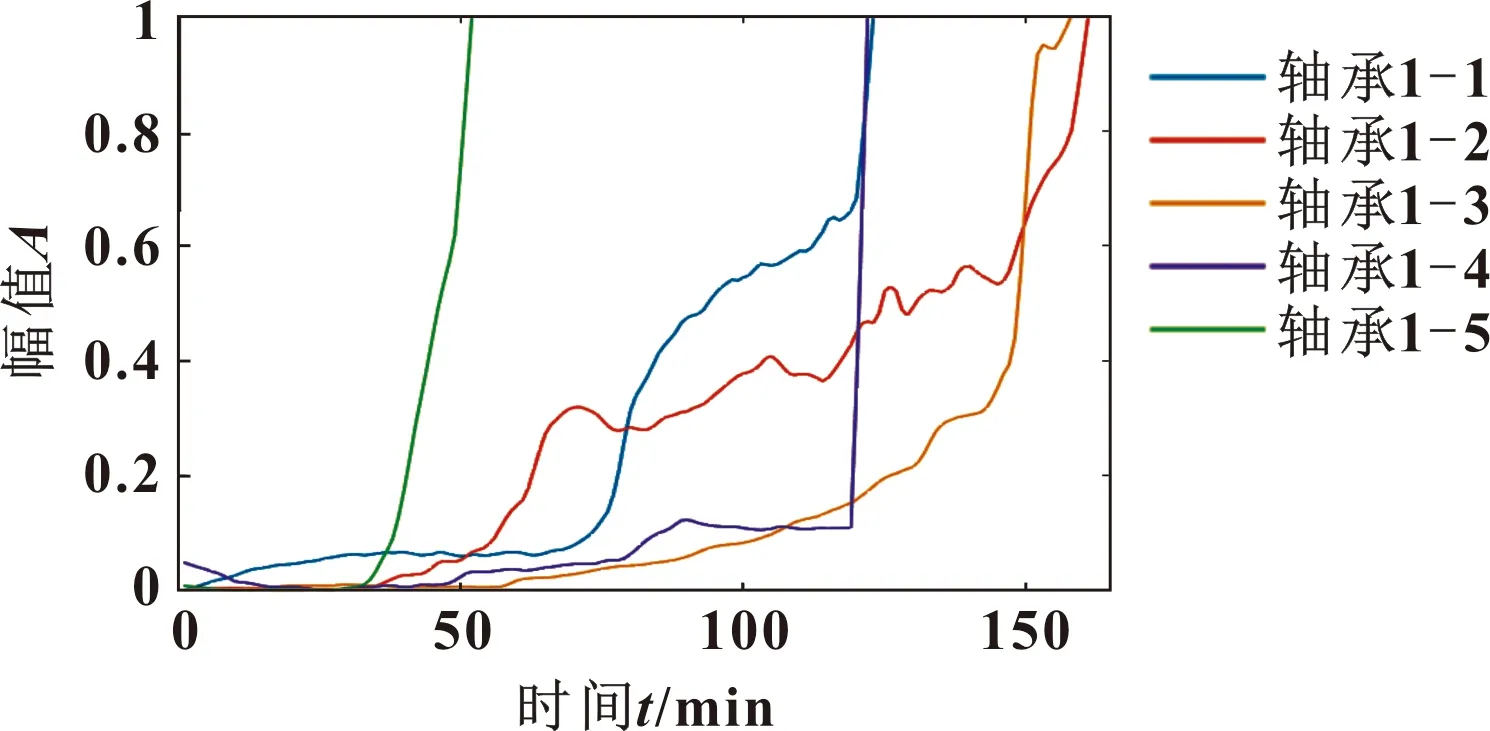
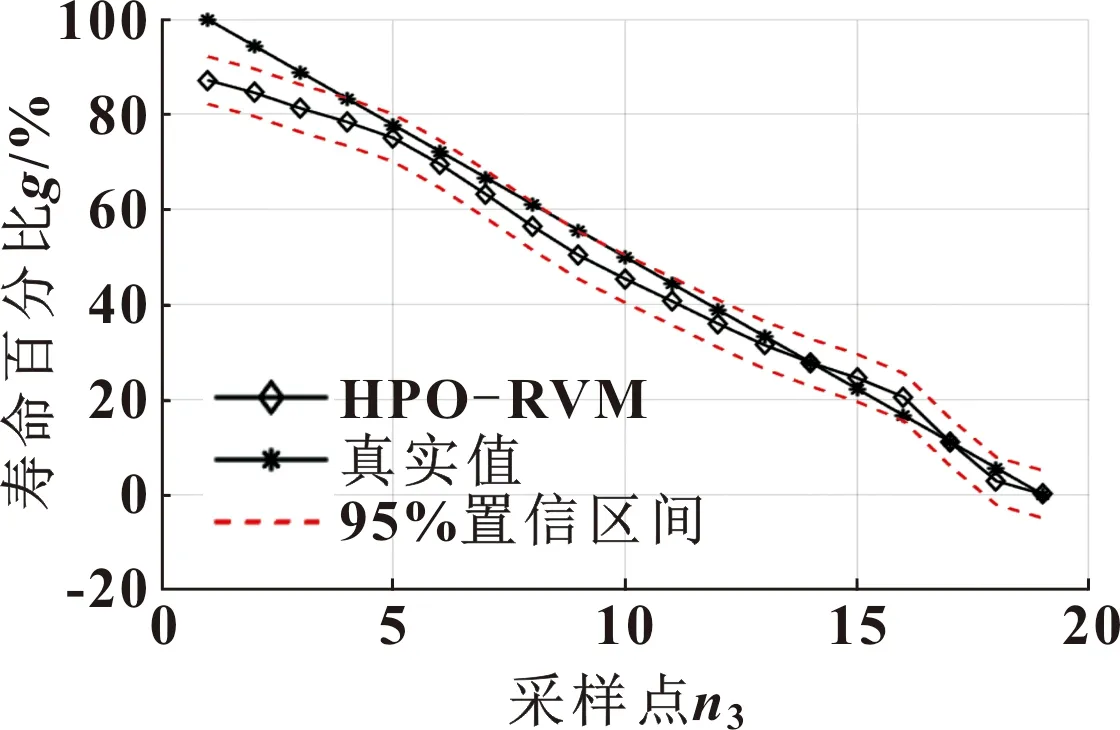
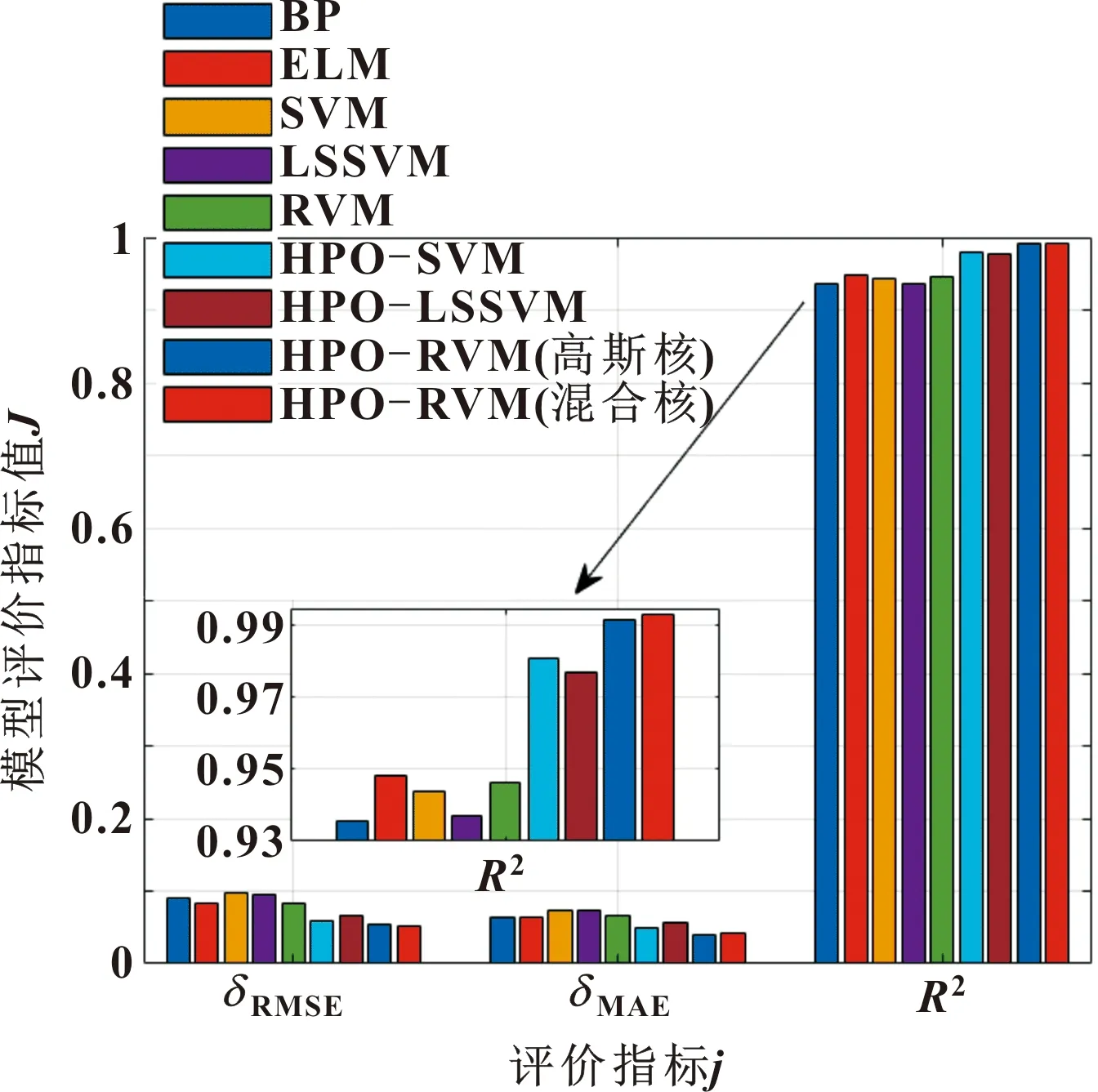
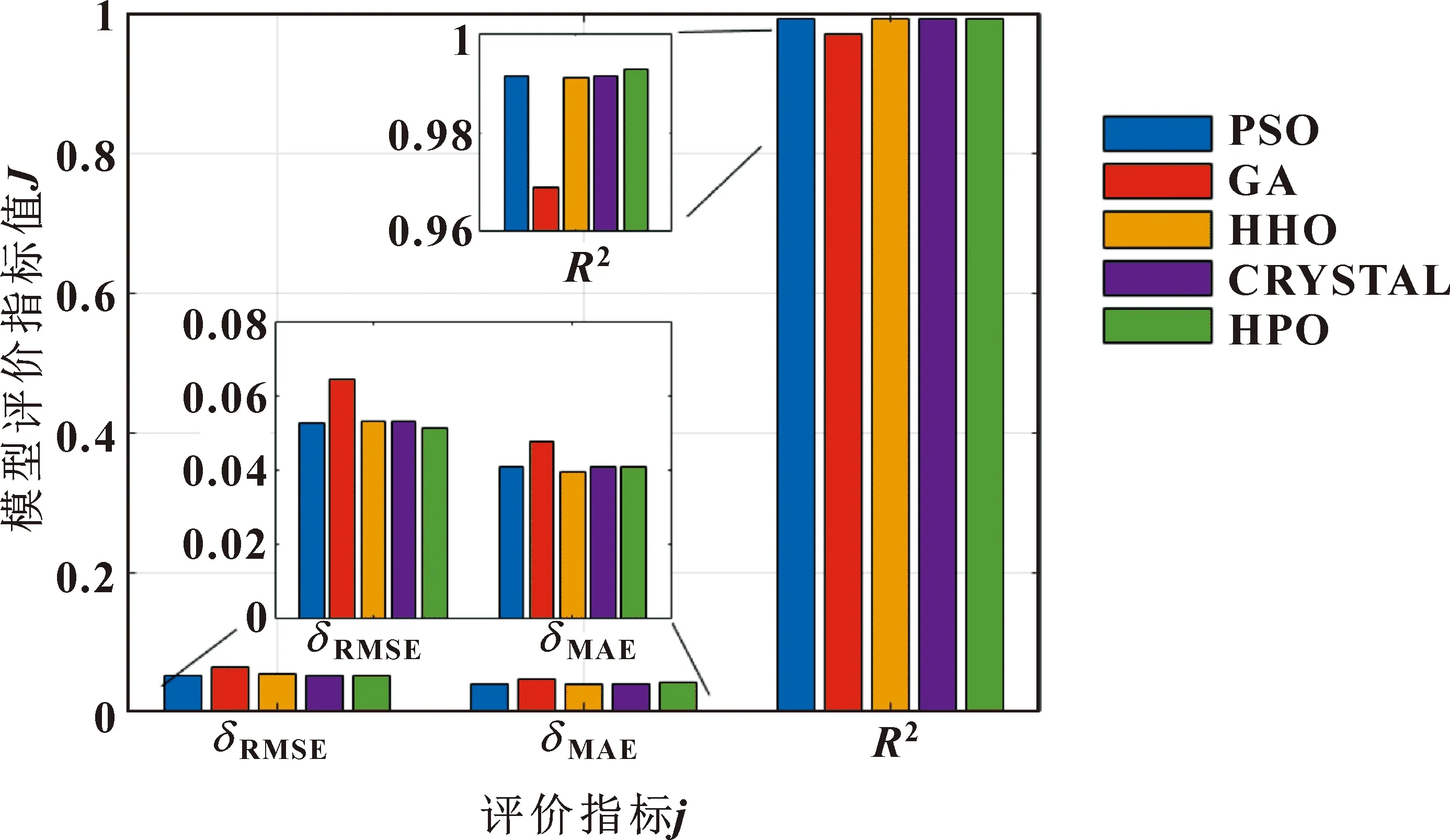
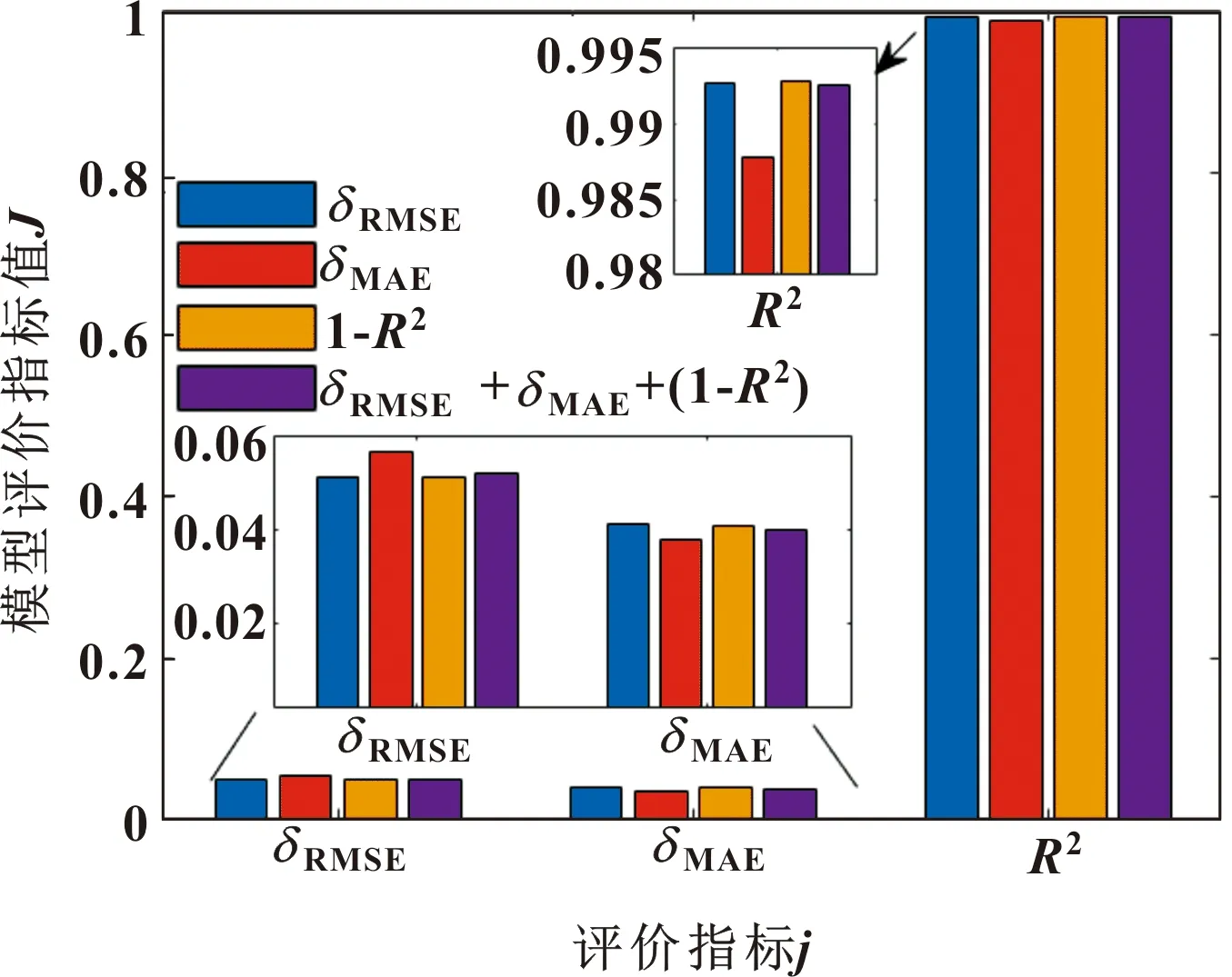
P=R1 Z=R2?δIDX+R3?(~δIDX) (26) 其中:R1和R3是[0,1]內(nèi)的隨機向量;δIDX是滿足條件P=0向量R1的索引值;C是探索和開發(fā)之間的平衡參數(shù),計算如下: (27) 其中:εit是當前迭代值;εitmax是最大迭代次數(shù)。 計算所有位置的平均值: (28) 計算歐幾里得距離: (29) 距離位置平均值最大的搜索代理視為獵物Ppos: Ppos=xi|iis index of Max(end)sort(Deuc) (30) 為了解決則算法延遲收斂性的問題,考慮一種遞減機制,如下式所示: kbest=round(C×N) (31) 其中:N是搜索代理的數(shù)量。因此,獵物的位置計算公式可寫為 Ppos=xi|iis soredDeuc(kbest) (32) 為了選擇獵人和獵物,結(jié)合式(25)和式(30)提出式(33): xi(t+1)= (33) 其中:R5是[0,1]內(nèi)的隨機數(shù);β是調(diào)節(jié)參數(shù)。 采用HPO算法對混合核參數(shù)進行尋優(yōu)。優(yōu)化的具體流程如圖1所示,優(yōu)化步驟如下: 圖1 參數(shù)優(yōu)化流程 步驟1,設(shè)置種群數(shù)、迭代次數(shù)以及優(yōu)化參數(shù)的上下界、目標函數(shù)。 步驟2,計算適應(yīng)度值,記錄最優(yōu)位置。 步驟3,利用式(26)和(27)更新參數(shù)Z和C。 步驟4,根據(jù)式(33)更新獵食者或獵物的位置,并計算適應(yīng)度值和最優(yōu)位置。 步驟5,判斷是否滿足停止條件,如果滿足,則輸出最優(yōu)解,跳轉(zhuǎn)至步驟6,否則重復(fù)步驟3-4。 步驟6,利用最優(yōu)解構(gòu)建RVM預(yù)測模型。 剩余使用壽命定義為 RUL=Tend-Ti (34) (35) 式中:Tend為軸承失效時刻;Ti為當前監(jiān)測點。為減少不同軸承間的差異,采用式(35)將軸承的剩余壽命進行歸一化處理。 基于特征融合與HPO-RVM的軸承剩余壽命預(yù)測步驟如下: 步驟1,提取時域、頻域、時頻域特征。 步驟2,計算每個特征的魯棒性和相關(guān)性,采用Critic方法確定評價指標的權(quán)值,然后計算每個特征的綜合得分。 步驟3,選取得分最高的前15個特征采用KECA降維融合,并以貢獻率大于90%的主成分作為退化特征。 步驟4,采用3σ方法確定軸承的初始故障時刻,當故障發(fā)生以后啟動剩余壽命預(yù)測機制。 步驟5,根據(jù)訓(xùn)練數(shù)據(jù),采用HPO尋優(yōu)得到RVM核參數(shù),代入RVM中得到HPO-RVM壽命預(yù)測模型。 步驟6,將測試集代入訓(xùn)練好的模型中進行剩余壽命預(yù)測,如圖2所示。 圖2 壽命預(yù)測流程 步驟7,模型性能評價。 評價指標:均方根誤差δRMSE、平均絕對誤差δMAE、決定系數(shù)R2。前2個評價指標越小說明模型的預(yù)測能力越好,第3個評價指標越大說明模型的預(yù)測能力越好[14]。 (36) (37) (38) 文中實驗驗證采用的是XJTU-SY全壽命滾動軸承數(shù)據(jù)集,圖3所示為搭建的實驗平臺。測試所采用滾動軸承的型號為LDK UER204。實驗共測試了3種工況共計15個軸承,具體工況信息如表1所示。傳感器為PCB 352C33加速度傳感器,采樣頻率25.6 kHz,每間隔1 min,采樣1.28 s。詳細實驗過程和信息參考文獻[15]。 以工況1中的5個軸承為研究對象進行滾動軸承的剩余壽命預(yù)測研究,分別命名為軸承1-1、軸承1-2、軸承1-3、軸承1-4、軸承1-5。 以工況1為例,提取時域、頻域、時頻域39個特征,然后歸一化。軸承1-1的特征如圖4—6所示。然后根據(jù)評價指標魯棒性和相關(guān)性計算每個特征的得分,采用Critic方法確定2個評價指標的權(quán)重,然后得到綜合評價指標。 圖4 軸承1-1時域特征 圖5 軸承1-1頻域特征 圖6 軸承1-1時頻域特征 根據(jù)式(4)計算工況1下5個軸承各個特征綜合得分的平均值。如圖7所示,選出前15個得分最高的特征,依次為37、36、29、22、2、10、1、3、17、34、6、33、32、26、35。可以看出:篩選出的特征包括時域特征、頻域特征和時頻域特征。 圖7 工況1軸承特征篩選 利用KECA方法將篩選出來的特征指標進行降維融合,從圖8中可以看出:工況1的各個軸承第一主成分的貢獻率都大于90%,因此選取第一主成分作為軸承的健康指標。為降低不同軸承間的差異性,對健康指標進行歸一化處理。為了降低噪聲或異常值引起的指標波動,采用局部加權(quán)回歸方法進行平滑處理,得到工況1的健康指標如圖9所示。 圖8 工況1各軸承主成分貢獻率 圖9 工況1軸承健康指標 軸承運行初期,退化特征不明顯,特征指標平穩(wěn),對它進行壽命預(yù)測工程意義不大。當發(fā)生早期故障以后,軸承開始退化,啟動剩余壽命預(yù)測。在進行壽命預(yù)測時只是用退化階段的數(shù)據(jù),避免了非退化數(shù)據(jù)對壽命預(yù)測的精度造成干擾。文中采用3σ方法檢測軸承的早期故障時刻,從而確定壽命預(yù)測的初始時間,具體方法參考文獻[16]。得到軸承1-1到軸承1-5發(fā)生故障的時刻為70、36、59、121、34 min。因此將發(fā)生早期故障以后的退化指標歸一化作為剩余壽命預(yù)測的數(shù)據(jù),從而提高預(yù)測的精度。 壽命預(yù)測階段,以前4個軸承作為訓(xùn)練集訓(xùn)練壽命預(yù)測模型,最后1個軸承作為測試集,驗證模型的預(yù)測性能。采用HPO算法尋優(yōu)得到RVM的組合核參數(shù),HPO算法的種群數(shù)設(shè)置為100,最大迭代次數(shù)為100,得到的最優(yōu)參數(shù)用于RVM預(yù)測模型的訓(xùn)練。將待測數(shù)據(jù)輸入到模型中進行預(yù)測,得到的壽命預(yù)測結(jié)果如圖10所示。可以看出:預(yù)測的總體趨勢與實際壽命百分比接近,大部分實際值都在預(yù)測結(jié)果95%的置信區(qū)間內(nèi)。 圖10 所提出的預(yù)測模型預(yù)測結(jié)果 將文中提出的預(yù)測模型與BP神經(jīng)網(wǎng)絡(luò)、極限學(xué)習機ELM、支持向量機SVM、最小二乘支持向量機LSSVM、相關(guān)向量機RVM、優(yōu)化支持向量機、優(yōu)化最小二乘支持向量機、優(yōu)化高斯核函數(shù)的相關(guān)向量機等預(yù)測模型進行對比。預(yù)測結(jié)果如圖11所示。 由圖11可以看出:文中所提的模型預(yù)測結(jié)果更加接近真實值,文中模型具有一定的優(yōu)勢。然后計算各個模型預(yù)測性能評價指標。δRMSE和δMAE值越小越好,R2越大越好。由圖12可以看出:文中所提的模型δRMSE和R2均為最優(yōu)結(jié)果,δMAE指標僅次于基于高斯核函數(shù)的相關(guān)向量機模型,但結(jié)果相近,總體上文中所提的模型更具優(yōu)勢。 圖12 不同預(yù)測模型預(yù)測結(jié)果評價 將文中采用的HPO優(yōu)化算法與常用的經(jīng)典優(yōu)化算法粒子群優(yōu)化算法(PSO)、遺傳優(yōu)化算法(GA),以及較新的優(yōu)化算法哈里斯鷹優(yōu)化算法(HHO)、晶體結(jié)構(gòu)優(yōu)化算法(CRYSTAL)等進行對比試驗,得到預(yù)測結(jié)果的評價指標如圖13所示。可以看出:HPO優(yōu)化算法可以取得較好的預(yù)測結(jié)果。 圖13 不同算法優(yōu)化模型預(yù)測結(jié)果評價 文中是以最小均方根誤差作為HPO優(yōu)化RVM核參數(shù)的目標函數(shù),實際應(yīng)用中可以根據(jù)需要設(shè)置不同的目標函數(shù),如δRMSE、δMAE、1-R2、δRMSE+δMAE+(1-R2)等最小值作為目標函數(shù)。當采用以上目標函數(shù)訓(xùn)練模型,測試模型的預(yù)測性能如圖14所示。可以看出:在訓(xùn)練模型時采用不同的目標函數(shù)可以使相應(yīng)的指標達到最小值,以滿足相應(yīng)的需求。 圖14 不同目標函數(shù)優(yōu)化模型預(yù)測結(jié)果評價 文中提出基于特征融合與HPO-RVM的滾動軸承剩余壽命預(yù)測方法,利用軸承全壽命數(shù)據(jù)集進行方法驗證,得出以下結(jié)論: (1)采用綜合評價指標篩選出來的特征包含時域、頻域、時頻域特征,將篩選出來的特征進一步用KECA降維融合,選取能夠反映90%以上特征信息的主成分作為退化特征,不僅降低了計算量,而且特征信息更加豐富,避免了單一特征不能較好地反映軸承的退化特征。 (2)采用檢測到軸承發(fā)生故障以后再進行壽命預(yù)測的策略,避免了非退化特征對剩余壽命預(yù)測精度的影響。 (3)HPO優(yōu)化混合核RVM的預(yù)測模型,其預(yù)測精度優(yōu)于BP、ELM、SVM等模型;所采用的優(yōu)化算法在此實驗中優(yōu)于PSO、GA等算法;并討論了不同的目標函數(shù)對預(yù)測模型的影響。綜合說明文中所提的壽命預(yù)測模型具有一定的優(yōu)勢。2.3 RVM參數(shù)優(yōu)化

3 壽命預(yù)測流程

4 實驗仿真驗證
4.1 數(shù)據(jù)集介紹
4.2 退化特征的構(gòu)建

4.3 滾動軸承壽命預(yù)測
5 結(jié)論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
