基于視覺的采摘機器人采摘定位與導航方法
2023-11-09 07:39:03蒙賀偉周馨曌吳烽云鄒天龍
自動化與信息工程 2023年5期
關鍵詞:機器視覺
蒙賀偉 周馨曌 吳烽云 鄒天龍
摘要:自主導航與采摘定位作為采摘機器人的關鍵任務,可有效減輕人工勞動強度,提高作業精度與作業效率。該文闡述和分析基于視覺的采摘機器人采摘定位與自主導航方法,主要涉及視覺導航的可行駛區域檢測、果實目標識別及采摘點定位,并根據國內外的研究現狀,對機器視覺的最新發展和未來發展趨勢進行展望。
關鍵詞:采摘機器人;機器視覺;自主導航;可行駛區域檢測;果實目標識別;采摘點定位
中圖分類號:TP391.4 ??????????文獻標志碼:A ???????????文章編號:1674-2605(2023)05-0001-07
DOI:10.3969/j.issn.1674-2605.2023.05.001
Picking?Location and Navigation Methods?for?Vision-based
Picking Robots
MENG?Hewei1ZHOU?Xinzhao1,2WU Fengyun3,4Zou Tianlong2
(1.College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832000, China
2.Foshan-Zhongke Innovation Research Institute of Intelligent Agriculture, Foshan 528010, China
3.Guangzhou College of Commerce, Guangzhou 511363, China
4.College of Engineering, South China Agricultural University, Guangzhou 510642, China)
Abstract:?Autonomous navigation and picking positioning, as key tasks of picking robots, can effectively reduce manual labor intensity, improve work accuracy and efficiency. This article elaborates and analyzes the methods of vision-based picking positioning and autonomous navigation for picking robots, mainly involving the detection of movable areas, fruit target recognition, and picking point positioning in visual navigation. Based on the current research status at home and abroad, it looks forward to the latest development and future development trends of machine vision.
Keywords:picking robots; machine vision; autonomous navigation; travelable area detection; fruit target recognition; picking point positioning
0 引言
在世界各地,水果在農業經濟中占有越來越重要的地位。根據聯合國糧食及農業組織的統計數據,自1991年至2021年以來,葡萄、蘋果、柑橘等水果的生產總值呈現穩步增長的趨勢[1]。水果收獲具有工作周期短、勞動密集、耗時等特點。隨著人口老齡化和
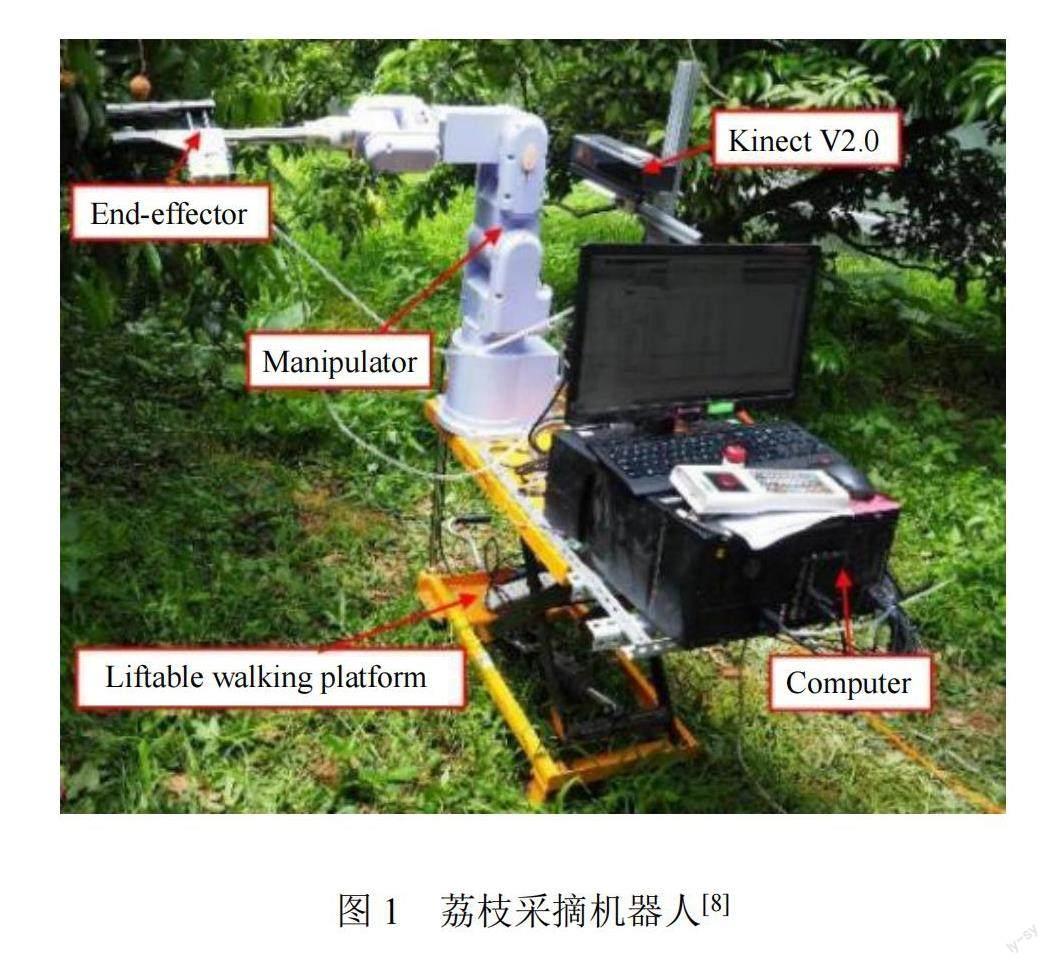
農村勞動力的短缺,人工成本逐年增加,勞動力需求與人工成本之間的矛盾日益突出,制約了中國傳統農業的發展。隨著現代信息技術、人工智能技術的快速發展,面向蘋果[2-3]、番茄[4-5]、荔枝[6-8]、火龍果[9]、茶葉[10-11]、甜椒[12-13]等多種作物的采摘機器人及相關技術[14-15]得到了國內外學者的關注。采摘機器人的應用對提高生產力、作業效率以及農業可持續性發展具有重要的意義。荔枝采摘機器人如圖1所示。
相較于工業機器人,采摘機器人的作業環境更加復雜,干擾因素多、障礙物多、不規則程度高,且由于果樹葉片遮擋等影響,降低了全球定位系統(global positioning system,?GPS)的定位精度。機器視覺具有成本低、操作簡單、信息豐富等特點,更適用于GPS信號被遮擋的山間、農田等復雜環境。機器視覺導航的關鍵技術主要涉及可行駛區域檢測,其研究方法通常分為基于機器學習的分割方法和基于圖像特征的分割方法。
采摘機器人除了實現果園環境下的自主行走外,還需要在復雜的環境下實現果實自動采摘。如何實現低損、智能、擬人化的采摘作業是采摘機器人的應用重點。目前相關學者的研究主要集中在果實目標識別、采摘點定位等方面。
本文分析基于視覺的采摘機器人自主導航與采摘定位的研究進展,在對基于機器學習的可行駛區域分割方法和基于圖像特征的可行駛區域分割方法進行總結分析的基礎上,進一步闡述果實目標識別、采摘點定位等方法的發展現狀,最后結合無人農場與智慧農業,對采摘機器人定位與導航技術的未來應用場景進行展望。
1 基于機器視覺的自主導航
可行駛區域檢測的主要目的是從復雜場景中提取無障礙可行駛區域,為確定導航路徑奠定基礎。根據可行駛區域的特點,可分為結構化可行駛區域和非結構化可行駛區域兩類。其中,結構化可行駛區域類似于城市道路、高速公路等標準化道路,車道標線清晰,道路邊緣規則,幾何特征鮮明;非結構化可行駛區域類似于果園、農村的道路以及作物行間區域,可行駛區域邊緣不規則、邊界不清晰、沒有車道標線。與結構化可行駛區域相比,非結構化可行駛區域具有更為復雜的環境背景。大部分非結構化可行駛區域的路面凹凸不平,并伴有隨機分布的雜草。
1.1 基于機器學習的可行駛區域分割方法
基于機器學習的可行駛區域分割方法可分為聚類[16]、支持向量機(support vector machine, SVM)[17]、深度學習[18]等。YANG等[19]提出一種基于神經網絡和像素掃描的視覺導航路徑提取方法,引入Segnet網絡和Unet網絡,提高果園路況信息和背景環境的分割效果;同時采用滑動濾波算法、掃描法和加權平均法擬合最終的導航路徑。LEI等[20]結合改進的種子SVM和二維激光雷達點云數據,對非結構化道路進行檢測和識別。WANG等[21]結合光照不變圖像,通過組合分析概率圖與梯度信息,實現復雜場景的道路提取。KIM等[22]采用基于補丁和卷積神經網絡(convolu-tional neural network, CNN)的輕量化神經網絡,實現半結構化果園環境中的自主路徑識別。ALAM等[23]采用最近鄰分類(nearest neighbor, NN)算法和軟投票聚合相結合的方法,實現結構化和非結構化環境下的道路提取。部分學者[24-26]基于機器學習的方法,研究遙感中的道路提取方法,但這種方法并不適用于采摘機器人。
1.2 基于圖像特征的可行駛區域分割方法
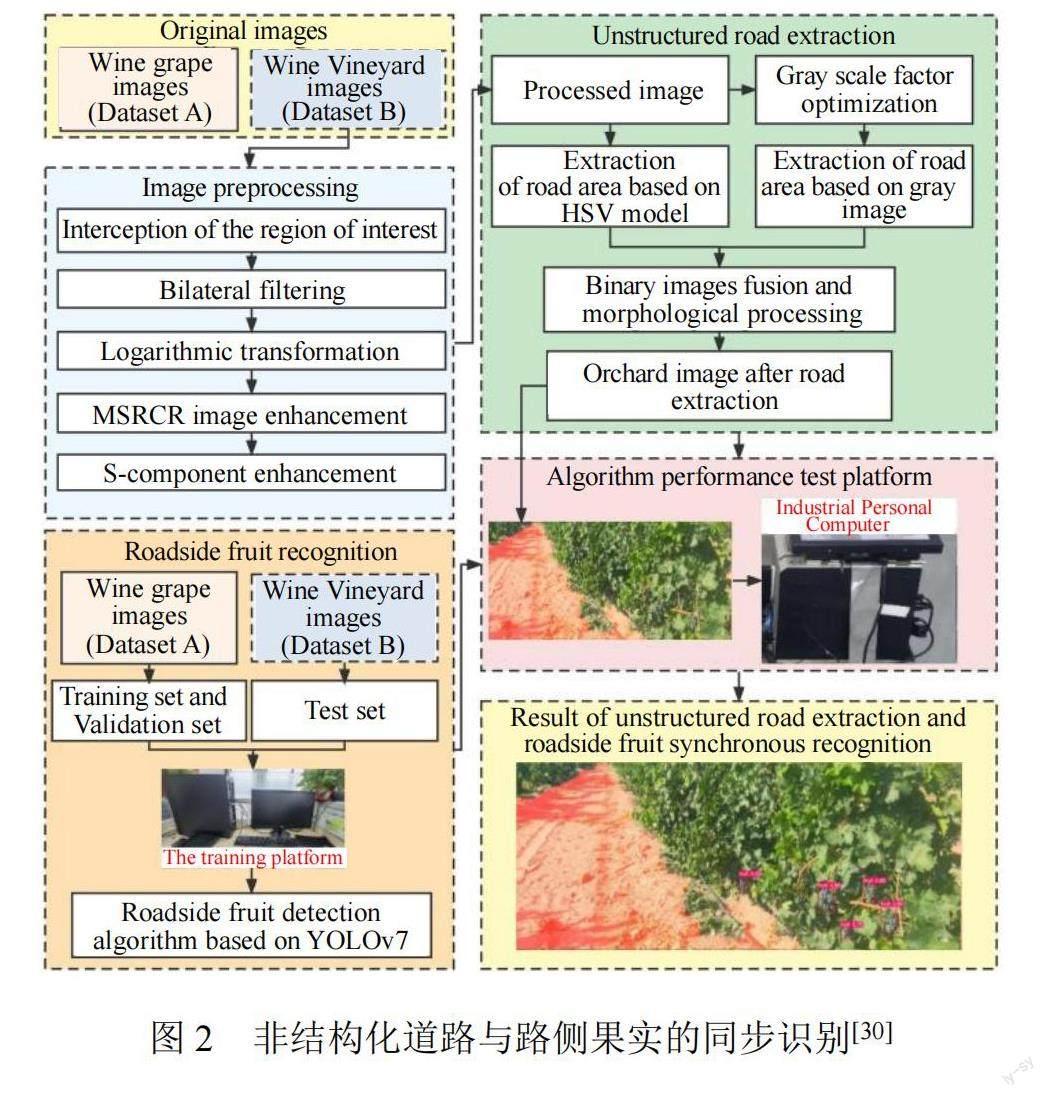
基于圖像特征的可行駛區域分割方法通過建立模型,利用顏色、紋理等特征來區分道路和非道路區域。ZHOU等[27]利用H分量來提取天空區域的目標路徑。CHEN等[28-29]利用改進的灰度因子和最大類間方差法提取土壤和植物的灰度圖像,實現溫室環境下土壤和植物的分割。ZHOU等[30]基于圖像預處理算法,優化灰度與因子,實現雙空間融合的非結構化道路提取,并在此基礎上實現非結構化道路與路側果實的同步識別,如圖2所示。
QI等[31]基于圖的流形排序方法對道路區域進行分割,并使用二項式函數來擬合道路區域模型,實現農村環境下的道路識別。一些學者在道路提取過程中考慮了消失點等空間結構特征,如SU等[32]在光照不變圖像預消失點約束的基礎上,采用Dijkstra方法結合單線激光雷達實現道路提取;PHUNG等[33]基于改進的消失點估計方法結合幾何和顏色,實現行人車道的檢測。然而,消失點的檢測比較耗時[34],且大多應用于結構化道路檢測,不適用于處理非結構化道路。
2 基于機器視覺的采摘定位
2.1 果實目標識別
果實目標識別的方法主要分為基于傳統圖像特征分析的方法和基于深度學習的方法。
基于傳統圖像特征分析的方法主要通過顏色[35]、形狀紋理[36]以及多種特征[37-38]對水果進行識別。如P?REZ-ZAVALA等[39]基于形狀和紋理信息,將聚類像素的區域分離成葡萄串,其平均檢測精度為88.61%,平均召回率為80.34%。周文靜等[40]基于K近鄰算法和最大類間方差法將葡萄果粒與圖像背景進行區別分割,并基于圓形Hough變換實現葡萄果粒的識別。LIU等[41]通過顏色、紋理信息以及SVM,實現了葡萄果束的分離和計數。吳亮生等[42]基于Cb Cr色差法和區域生長策略提取了楊梅果實潛在的前景區域。
基于傳統圖像特征分析的方法在面向多變環境時具有一定的局限性,因此基于深度學習的方法得到快速發展,并廣泛應用于智慧農業領域[43-47],如在作物生長形態識別[48-53]、分類定位[54-57]、跟蹤計數[58-60]和病蟲害識別[61-64]等領域受到學者的高度重視,深度學習的相關技術也在果蔬的目標檢測與識別方面得到深入研究。LI等[65]利用Faster R-CNN網絡模型、色差和色差比實現果園混亂背景下的蘋果檢測與分割。WANG等[66]開發一種基于通道修剪YOLOv5s算法的蘋果果實檢測方法,該模型具有尺寸小、檢測速度快等特點。FU等[67]通過修改YOLOv4網絡模型,實現果園自然環境中香蕉束和莖的快速檢測。HAYDAR等[68]基于OpenCV AI Kit (OAK-D)與YOLOv4-tiny深度學習模型,開發一種支持深度學習的機器視覺控制系統,實現果實高度的檢測以及割臺采摘齒耙位置的自動調整。LI等[69]基于改進的Faster R-CNN提出Strawberry R-CNN,通過創建草莓計數誤差集,設計一種草莓識別與計數評估方法。SUNIL等[70]采用ResNet50、多視角特征融合網絡(multi-view feature fusion network, MFFN)和自適應注意力機制,結合通道、空間和像素注意力對番茄植物葉子圖像進行分類,實現基于MFFN的番茄植物病害分類。程佳兵等[71]基于深度目標檢測網絡實現水果與背景區域的分割,借助立體匹配和三角測量技術,實現水果三維點云與空間位置的獲取。
2.2 采摘點定位
對果實目標識別后,結合果實的特性,對果實的采摘點進行定位,為采摘末端提供作業信息,以實現低損、準確的水果收獲。
張勤等[72]基于YOLACT模型對番茄果梗進行粗分割,通過感興趣區域(region of interest, ROI)的位置匹配關系、細化算法、膨脹操作和果梗形態特征等進一步對果梗進行細分割,最終結合深度信息求取采摘點坐標。徐鳳如等[73]采用改進型YOLOv4-Dense算法和OpenCV圖像處理方法,在對芽葉進行檢測的基礎上,基于熔斷行預目標采摘區域的交點即為理想采摘點的思想,對茶樹芽葉采摘點進行定位。宋彥等[74]構建一種基于多頭自注意力機制結合多尺度特征融合的RMHSA-NeXt語義分割算法,實現茶葉采摘點的分割,具有準確性高、推理速度快等特點。寧政通等[75]采用掩模區域卷積神經網絡與閾值分割方法,實現葡萄果梗的識別,并將果梗質心點確定為采摘點。杜文圣等[76]通過改進的MaskR-CNN模型和集合邏輯算法,實現鮮食葡萄的檢測與夾持點定位。梁喜鳳等[77]利用番茄果串的質心及其輪廓邊界確定果梗的ROI,以第一個果實分叉點與果梗骨架角點確定采摘點位置。畢松等[78]通過分割成熟草莓的目標點云對草莓位姿進行估計,結合草莓位姿質心與草莓高確定采摘點。ZHAO等[79]基于采摘點服從邊界框的思路,結合改進的YOLOv4,實現葡萄檢測與采摘點的同步預測。張勤等[80]基于YOLOv4算法和番茄串與對應果梗的連通關系,篩選可摘番茄串,并利用深度信息和顏色特征確定采摘點。WU等[81]提出一種自上而下的葡萄果梗定位思路,整合目標和關鍵點的檢測功能,實現果梗及其采摘點的定位。JIN等[82]構建遠近距離立體視覺系統對葡萄果串與果梗進行識別與定位,并基于果梗質心識別算法實現采摘點定位。TANG等[83]采用k-means++先驗框聚類方法對YOLOv4-tiny模型進行改進,并基于提取的目標ROI提出一種雙目立體匹配策略,在降低算法計算量的同時,實現復雜環境下的油茶果果實檢測與采摘點定位。WU等[84-85]為實現香蕉智能化采摘,提出改進的YOLOv5-B模型,搭建立體視覺香蕉雄花簇切斷機器人實驗平臺,并獲得花軸切斷點的三維空間坐標。上述研究方法為采摘機器人的無人化作業和低損采摘奠定了基礎。
3 結論與展望
本文綜述了機器視覺在采摘機器人中采摘定位與自主導航的應用,主要包括基于機器視覺的自主導航、果實目標識別與采摘點定位等。
雖然人工智能及深度學習方法提高了采摘機器人作業的準確性與可靠性,但由于農業環境的復雜性和不確定性,機器視覺的應用仍然存在較大的定位誤差。因此,需要結合采摘機器人的控制系統和機構的創新設計,進一步開發機器視覺與末端的誤差主動容錯機制,以降低目標定位和操作誤差。
采摘機器人在自主行走作業過程中,受到地面不平、震動等動態干擾,導致視覺畫面質量降低,影響導航的精確度。因此,需要結合圖像預處理技術,進一步開發實時降噪、多源信息融合的導航算法,提高采摘機器人在野外果園作業的魯棒性與可靠性。此外,采摘與行走的多行為協同決策是一個值得研究的方向。
參考文獻
參考文獻
[1]FAO. Value of agricultural production [EB/OL]. (2023-09-23) [2023-09-23]. https://www.fao.org/faostat/en/#data/QV/visualize.
[2]丁一,姬偉,許波,等.蘋果采摘機器人柔順抓取的參數自整定阻抗控制[J].農業工程學報,2019,35(22):257-266.
[3]LI T, XIE F, ZHAO Z, et al. A multi-arm robot system for efficient apple harvesting: Perception, task plan and control[J]. Computers and Electronics in Agriculture, 2023,211:107979.
[4]LI Y, FENG Q, LIU C, et al. MTA-YOLACT: Multitask-aware network on fruit bunch identification for cherry tomato robotic harvesting[J]. European Journal of Agronomy, 2023,146:126812.
[5]于豐華,周傳琦,楊鑫,等.日光溫室番茄采摘機器人設計與試驗[J].農業機械學報,2022,53(1):41-49.
[6]ZHONG Z, XIONG J, ZHENG Z, et al. A method for litchi picking points calculation in natural environment based on main fruit bearing branch detection[J]. Computers and Electronics in Agriculture, 2021,189:106398.
[7]陳燕,蔣志林,李嘉威,等.夾剪一體的荔枝采摘末端執行器設計與性能試驗[J].農業機械學報,2018,49(1):35-41.
[8]LI J, TANG Y, ZOU X, et al. Detection of fruit-bearing branches and localization of litchi clusters for vision-based harvesting robots[J]. IEEE Access, 2020,8:117746-117758.
[9]ZHANG F, CAO W, WANG S, et al. Improved YOLOv4 recognition algorithm for pitaya based on coordinate attention and combinational convolution[J]. Frontiers in Plant Science, 2022,13:1030021.
[10]CHEN C, LU J, ZHOU M, et al. A YOLOv3-based computer vision system for identification of tea buds and the picking point[J]. Computers and Electronics in Agriculture, 2022,198: 107116.
[11]楊化林,鐘巖,姜沅政,等.基于時間與急動度最優的并聯式采茶機器人軌跡規劃混合策略[J].機械工程學報,2022, 58(9):62-70.
[12]BARTH R, HEMMING J, VAN HENTEN E J. Angle estimation between plant parts for grasp optimisation in harvest robots[J]. Biosystems Engineering, 2019,183:26-46.
[13]HESPELER S C, NEMATI H, DEHGHAN-NIRI E. Non-destructive thermal imaging for object detection via advanced deep learning for robotic inspection and harvesting of chili peppers[J]. Artificial Intelligence in Agriculture, 2021,5:102-117.
[14]林俊強,王紅軍,鄒湘軍,等.基于DPPO的移動采摘機器人避障路徑規劃及仿真[J].系統仿真學報,2023,35(8):1692-1704.
[15]霍韓淋,鄒湘軍,陳燕,等.基于視覺機器人障礙點云映射避障規劃及仿真[J/OL].系統仿真學報:1-12[2023-09-20]. http://kns.cnki.net/kcms/detail/11.3092.V.20230823.0932.002.html.
[16]ZHANG Z, ZHANG X, CAO R, et al. Cut-edge detection method for wheat harvesting based on stereo vision[J]. Computers and Electronics in Agriculture, 2022,197:106910.
[17]LIU Y, XU W, DOBAIE A M, et al. Autonomous road detection and modeling for UGVs using vision-laser data fusion[J]. Neurocomputing, 2018,275:2752-2761.
[18]LI Y, HONG Z, CAI D, et al. A SVM and SLIC based detection method for paddy field boundary line[J]. Sensors, 2020,20(9):2610.
[19]YANG Z, OUYANG L, ZHANG Z, et al. Visual navigation path extraction of orchard hard pavement based on scanning method and neural network[J]. Computers and Electronics in Agriculture, 2022,197:106964.
[20]LEI G, YAO R, ZHAO Y, et al. Detection and modeling of unstructured roads in forest areas based on visual-2D lidar data fusion[J]. Forests, 2021,12(7):820.
[21]WANG E, LI Y, SUN A, et al. Road detection based on illuminant invariance and quadratic estimation[J]. Optik, 2019, 185:672-684.
[22]KIM W S, LEE D H, KIM Y J, et al. Path detection for autonomous traveling in orchards using patch-based CNN[J]. Computers and Electronics in Agriculture, 2020,175:105620.
[23]ALAM A, SINGH L, JAFFERY Z A, et al. Distance-based confidence generation and aggregation of classifier for un-structured road detection[J]. Journal of King Saud University--Computer and Information Sciences, 2022,34(10):8727-8738.
[24]XIN J, ZHANG X, ZHANG Z, et al. Road extraction of high-resolution remote sensing images derived from DenseUNet[J]. Remote Sensing, 2019,11(21):2499.
[25]GUAN H, LEI X, YU Y, et al. Road marking extraction in UAV imagery using attentive capsule feature pyramid network[J]. International Journal of Applied Earth Observation and Geoinformation, 2022,107:102677.
[26]YANG M, YUAN Y, LIU G. SDUNet: Road extraction via spatial enhanced and densely connected UNet[J]. Pattern Recognition, 2022,126:108549.
[27]ZHOU M, XIA J, YANG F, et al. Design and experiment of visual navigated UGV for orchard based on Hough matrix and RANSAC[J]. International Journal of Agricultural and Biolo-gical Engineering, 2021,14(6):176-184.
[28]CHEN J, QIANG H, WU J, et al. Extracting the navigation path of a tomato-cucumber greenhouse robot based on a median point Hough transform[J]. Computers and Electronics in Agriculture, 2020,174:105472.
[29]CHEN J, QIANG H, WU J, et al. Navigation path extraction for greenhouse cucumber-picking robots using the prediction-point Hough transform[J]. Computers and Electronics in Agriculture, 2021,180:105911.
[30]ZHOU X, ZOU X, TANG W, et al. Unstructured road extraction and roadside fruit recognition in grape orchards based on a synchronous detection algorithm[J]. Frontiers in Plant Science, 2023,14:1103276.
[31]QI N, YANG X, LI C, et al. Unstructured road detection via combining the model-based and feature-based methods[J]. IET Intelligent Transport Systems, 2019,13(10):1533-1544.
[32]SU Y, ZHANG Y, ALVAREZ J M, et al. An illumination-invariant nonparametric model for urban road detection using monocular camera and single-line lidar[C]//2017 IEEE Inter-national Conference on Robotics and Biomimetics (ROBIO). IEEE, 2017:68-73.
[33]PHUNG S L, LE M C, BOUZERDOUM A. Pedestrian lane detection in unstructured scenes for assistive navigation[J]. Computer Vision and Image Understanding, 2016,149:186-196.
[34]XU F, HU B, CHEN L, et al. An illumination robust road detection method based on color names and geometric infor-mation[J]. Cognitive Systems Research, 2018,52:240-250.
[35]王玉德,張學志.復雜背景下甜瓜果實分割算法[J].農業工程學報,2014,30(2):176-181.
[36]田有文,李天來,李成華,等.基于支持向量機的葡萄病害圖像識別方法[J].農業工程學報,2007(6):175-180.
[37]謝忠紅,姬長英.基于顏色模型和紋理特征的彩色水果圖像分割方法[J].西華大學學報(自然科學版),2009,28(4):41-45.
[38]盧軍,桑農.變化光照下樹上柑橘目標檢測與遮擋輪廓恢復技術[J].農業機械學報,2014,45(4):76-81;60.
[39]P?REZ-ZAVALA R, TORRES-TORRITI M, CHEEIN F A, et al. A pattern recognition strategy for visual grape bunch detection in vineyards[J]. Computers and Electronics in Agri-culture, 2018,151:136-149.
[40]周文靜,查志華,吳杰.改進圓形Hough變換的田間紅提葡萄果穗成熟度判別[J].農業工程學報,2020,36(9):205-213.
[41]LIU S, WHITTY M. Automatic grape bunch detection in vineyards with an SVM classifier[J]. Journal of Applied Logic, 2015, 13(4): 643-653.
[42]吳亮生,雷歡,陳再勵,等.基于局部滑窗技術的楊梅識別與定位方法[J].自動化與信息工程,2021,42(6):30-35;48.
[43]TANG Y, CHEN M, WANG C, et al. Recognition and localization methods for vision-based fruit picking robots: A review[J]. Frontiers in Plant Science, 2020, 11: 510.
[44]SANAEIFAR A, GUINDO M L, BAKHSHIPOUR A, et al. Advancing precision agriculture: The potential of deep lear-ning for cereal plant head detection[J]. Computers and Electro-nics in Agriculture, 2023, 209:107875.
[45]WENG S, TANG L, QIU M, et al. Surface-enhanced Raman spectroscopy charged probes under inverted superhydrophobic platform for detection of agricultural chemicals residues in rice combined with lightweight deep learning network[J]. Analy-tica Chimica Acta, 2023,1262:341264.
[46]KHAN S, ALSUWAIDAN L. Agricultural monitoring system in video surveillance object detection using feature extraction and classification by deep learning techniques[J]. Computers and Electrical Engineering, 2022, 102:108201.
[47]GUO R, XIE J, ZHU J, et al. Improved 3D point cloud segmentation for accurate phenotypic analysis of cabbage plants using deep learning and clustering algorithms[J]. Com-puters and Electronics in Agriculture, 2023,211:108014.
[48]YU S, FAN J, LU X, et al. Deep learning models based on hyperspectral data and time-series phenotypes for predicting quality attributes in lettuces under water stress[J]. Computers and Electronics in Agriculture, 2023, 211:108034.
[49]PAN Y, ZHANG Y, WANG X, et al. Low-cost livestock sorting information management system based on deep lear-ning[J]. Artificial Intelligence in Agriculture, 2023,9:110-126.
[50]梁金營,黃貝琳,潘棟.基于圖像識別的物流停車場引導系統的設計[J].機電工程技術,2022,51(11):163-166.
[51]陳傳敏,賈文瑤,劉松濤,等.高鹽廢水中硅的形態定性識別及定量分析[J].中國測試,2023,49(2):87-92.
[52]郭林,沈東義,毛火明,等.基于形態相似度識別的大數據分析方法在測井巖性識別中的研究[J].電腦知識與技術,2023, 19(3):54-56.
[53]宮志宏,董朝陽,于紅,等.基于機器視覺的冬小麥葉片形態測量軟件開發[J].中國農業氣象,2022,43(11):935-944.
[54]SUNIL G C, ZHANG Y, KOPARAN C, et al. Weed and crop species classification using computer vision and deep learning technologies in greenhouse conditions[J]. Journal of Agricul-ture and Food Research, 2022,9:100325.
[55]PUTRA Y C, WIJAYANTO A W. Automatic detection and counting of oil palm trees using remote sensing and object-based deep learning[J]. Remote Sensing Applications: Society and Environment, 2023, 29:100914.
[56]劉斌,龍健寧,程方毅,等.基于卷積神經網絡的物流貨物圖像分類研究[J].機電工程技術,2021,50(12):79-82;175.
[57]林靜,徐月華.水果姿態圖像自動采集訓練檢測儀設計[J].中國測試,2021,47(7):119-124.
[58]WU Z, SUN X, JIANG H, et al. NDMFCS: An automatic fruit counting system in modern apple orchard using abatement of abnormal fruit detection[J]. Computers and Electronics in Agriculture, 2023, 211:108036.
[59]WU F, YANG Z, MO X, et al. Detection and counting of banana bunches by integrating deep learning and classic image-processing algorithms[J]. Computers and Electronics in Agriculture, 2023,209:107827.
[60]成海秀,陳河源,曹惠茹,等.無人機目標跟蹤系統的設計與實現[J].機電工程技術,2020,49(11):165-167.
[61]ALSHAMMARI H H, TALOBA A I, SHAHIN O R. Identification of olive leaf disease through optimized deep learning approach[J]. Alexandria Engineering Journal, 2023, 72:213-224.
[62]GIAKOUMOGLOU N, PECHLIVANI E M, SAKELLIOU A, et al. Deep learning-based multi-spectral identification of grey mould[J]. Smart Agricultural Technology, 2023,4:100174.
[63]KAUR P, HARNAL S, GAUTAM V, et al. An approach for characterization of infected area in tomato leaf disease based on deep learning and object detection technique[J]. Enginee-ring Applications of Artificial Intelligence, 2022,115:105210.
[64]ZHU D J, XIE L Z, CHEN B X, et al. Knowledge graph and deep learning based pest detection and identification system for fruit quality[J]. Internet of Things, 2023,21:100649.
[65]LI T, FANG W, ZHAO G, et al. An improved binocular localization method for apple based on fruit detection using deep learning[J]. Information Processing in Agriculture 2023, 10(2):276-287.
[66]WANG D, HE D. Channel pruned YOLO V5s-based deep learning approach for rapid and accurate apple fruitlet detection before fruit thinning[J]. Biosystems Engineering, 2021,210:271-281.
[67]FU L, WU F, ZOU X, et al. Fast detection of banana bunches and stalks in the natural environment based on deep learning[J]. Computers and Electronics in Agriculture, 2022,194:106800.
[68]HAYDAR Z, ESAU T J, FAROOQUE A A, et al. Deep learning supported machine vision system to precisely auto-mate the wild blueberry harvester header[J]. Scientific Reports, 2023,13(1):10198.
[69]LI J, ZHU Z, LIU H, et al. Strawberry R-CNN: Recognition and counting model of strawberry based on improved faster R-CNN[J]. Ecological Informatics, 2023,77:102210.
[70]SUNIL C K, JAIDHAR C D, PATIL N. Tomato plant disease classification using multilevel feature fusion with adaptive channel spatial and pixel attention mechanism[J]. Expert Systems with Applications, 2023,228:120381.
[71]程佳兵,鄒湘軍,陳明猷,等.多類復雜水果目標的通用三維感知框架[J].自動化與信息工程,2021,42(3):15-20.
[72]張勤,龐月生,李彬.基于實例分割的番茄串視覺定位與采摘姿態估算[J/OL].農業機械學報:1-13[2023-09-18]. http://kns.cnki.net/kcms/detail/11.1964.S.20230808.1632.024.html.
[73]徐鳳如,張昆明,張武,等.一種基于改進YOLOv4算法的茶樹芽葉采摘點識別及定位方法[J].復旦學報(自然科學版),2022,61(4):460-471.
[74]宋彥,楊帥,鄭子秋,等.基于多頭自注意力機制的茶葉采摘點語義分割算法[J].農業機械學報,2023,54(9):297-305.
[75]寧政通,羅陸鋒,廖嘉欣,等.基于深度學習的葡萄果梗識別與最優采摘定位[J].農業工程學報,2021,37(9):222-229.
[76]杜文圣,王春穎,朱衍俊,等.采用改進Mask R-CNN算法定位鮮食葡萄疏花夾持點[J].農業工程學報,2022,38(1):169-177.
[77]梁喜鳳,金超杞,倪梅娣,等.番茄果實串采摘點位置信息獲取與試驗[J].農業工程學報,2018,34(16):163-169.
[78]畢松,隗朋峻,劉仁學.溫室高架栽培草莓空間姿態識別與采摘點定位方法[J].農業機械學報,2023,54(9):53-64;84.
[79]ZHAO R, ZHU Y, LI Y. An end-to-end lightweight model for grape and picking point simultaneous detection[J]. Biosystems Engineering, 2022,223:174-188.
[80]張勤,陳建敏,李彬,等.基于RGB-D信息融合和目標檢測的番茄串采摘點識別定位方法[J].農業工程學報,2021,37(18): 143-152.
[81]WU Z, XIA F, ZHOU S, et al. A method for identifying grape stems using keypoints[J]. Computers and Electronics in Agri-culture, 2023,209:107825.
[82]JIN Y, YU C, YIN J, et al. Detection method for table grape ears and stems based on a far-close-range combined vision system and hand-eye-coordinated picking test[J]. Computers and Electronics in Agriculture, 2022,202:107364.
[83]TANG Y, ZHOU H, WANG H, et al. Fruit detection and positioning technology for a Camellia oleifera C. Abel orchard based on improved YOLOv4-tiny model and binocular stereo vision[J]. Expert Systems with Applications, 2023,211:118573.
[84]WU F, DUAN J, AI P, et al. Rachis detection and three-dimensional localization of cut off point for vision-based banana robot[J]. Computers and Electronics in Agriculture, 2022,198:107079.
[85]WU F, DUAN J, CHEN S, et al. Multi-target recognition of bananas and automatic positioning for the inflorescence axis cutting point[J]. Frontiers in Plant Science, 2021,12:705021.
作者簡介:
蒙賀偉,男,1982年生,博士,教授/博士生導師,主要研究方向:農業機械化、農業電氣化與自動化。E-mail: mhw_mac@126.com
周馨曌,女,1997年生,博士,主要研究方向:智慧農業、機器視覺、農業電氣化與自動化。E-mail: zxinzhao@126.com
吳烽云(通信作者),女,1988年生,博士,主要研究方向:智慧農業、機器視覺。E-mail: fyseagull@163.com
鄒天龍,男,1986年生,大專,主要研究方向:測控系統集成應用。E-mail:?84174619@qq.com
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30