基于承載能力和傳動效率優(yōu)化的機器人RV 減速器擺線輪齒廓修形影響研究*
2023-11-15 08:08:52王春光羅志江張俊峰
制造技術(shù)與機床 2023年11期
關(guān)鍵詞:優(yōu)化
王春光 羅志江 張俊峰
(①廣東工業(yè)大學機電工程學院,廣東 廣州 510006;重慶電子工程職業(yè)學院智能制造學院,重慶 401331)
RV 減速器具有傳動比范圍大、傳動精度高、承載能力強、傳動平穩(wěn)和傳動效率高等諸多優(yōu)點。作為工業(yè)機器人最為核心的部件之一,它一般安裝在工業(yè)機器人的底座、大臂等重負載區(qū)域。RV 減速器結(jié)構(gòu)復雜,技術(shù)壁壘高,在復雜約束條件下,尤其是考慮齒廓修形的情況下,進行RV 減速器結(jié)構(gòu)精確設(shè)計是一個迫切需要解決的問題。因此,開展RV 減速器結(jié)構(gòu)優(yōu)化設(shè)計方法研究,對于提高RV 減速器整機性能具有重要意義。
RV 減速器擺線輪齒廓修形直接影響RV 減速器的傳動精度、承載能力和效率等傳動性能[1-2]。為了提高RV 減速器的傳動特性,擺線輪齒廓修形必須選擇合理的修形方法及嚴格控制修形量。陸龍生等結(jié)合傳統(tǒng)等距修形方法和移距修形方法,提出了一種基于優(yōu)化承載能力的RV 減速器擺線輪齒廓的新型等距-移距組合修形方法[3]。安宗文等為合理選擇修形方法及修形參數(shù)、改善擺線輪齒面的受力狀態(tài),提出了一種以優(yōu)化承載能力為目標、基于粒子群優(yōu)化算法的擺線輪齒廓等距-移距修形方法[4]。以上兩種方法的優(yōu)化變量只考慮了等距和移距修形量兩個變量,以承載能力為單一優(yōu)化目標,優(yōu)化變量和優(yōu)化目標難以全面地體現(xiàn)RV 減速器的運動特性。
為了提高RV 減速器的使用性能,國內(nèi)外眾多學者對RV 減速器的優(yōu)化設(shè)計方法進行了研究。劉江等對RV 減速器的傳動精度進行了可靠性分析和優(yōu)化設(shè)計,采用多目標遺傳算法,以擺線針輪最大磨損和最低加工成本為目標對擺線針輪及其他關(guān)鍵零件的參數(shù)進行優(yōu)化分析[5]。Yang M D 等將改進后的先進均值法和Double-Loop 法相結(jié)合,建立了RV 減速器優(yōu)化模型,基于不同程度的可靠性,對減速器的體積進行了優(yōu)化[6]。余永康等使用Romax Designer 軟件和遺傳算法對RV 減速器承載能力和傳動誤差進行了修行優(yōu)化[7]。王明楠等使用拓撲優(yōu)化的方法來對RV 減速器的針齒殼和行星架進行了輕量化設(shè)計,在保證強度足夠的情況下減輕了整機的質(zhì)量[8]。鄭勝予等基于NSGA-Ⅱ遺傳算法,以體積最小和可靠度最高為目標對擺線針輪行星減速器進行了優(yōu)化[9]。樓嘉彬等基于遺傳算法對RV 減速器擺線針輪結(jié)構(gòu)進行了可靠性優(yōu)化[10]。由上述研究可見,目前RV 減速器的優(yōu)化設(shè)計主要涉及體積、輕量化、可靠度、承載能力和傳動精度等方面,而承載能力和傳動效率是RV 減速器的核心指標,把傳動效率和承載能力有效結(jié)合起來進行多目標優(yōu)化更有益于RV 減速器的精確設(shè)計。
本次以RV-40E 減速器為實例,以關(guān)鍵設(shè)計參數(shù)作為設(shè)計變量,考慮擺線輪齒廓修形影響,以擺線針輪最大嚙合力最小和整機傳動效率最高為優(yōu)化目標進行多目標優(yōu)化,并結(jié)合TOPSIS 和CRITIC方法確定Pareto 解集中的最優(yōu)解,采用NSGA-Ⅱ遺傳算法和動態(tài)仿真來進行求解和輔助驗證,力求提高整機的承載能力和傳動效率。
1 RV 減速器結(jié)構(gòu)優(yōu)化模型
RV 減速機由一級行星齒輪機構(gòu)和二級擺線針輪減速機構(gòu)組成,一級減速機構(gòu)是由中心輪和行星輪構(gòu)成的行星齒輪傳動系統(tǒng),二級是由曲柄軸、擺線輪、針齒和行星架構(gòu)成的傳動系統(tǒng),其機構(gòu)簡圖如圖1 所示[11],二級減速機構(gòu)的減速比遠大于一級減速機構(gòu)[12]。
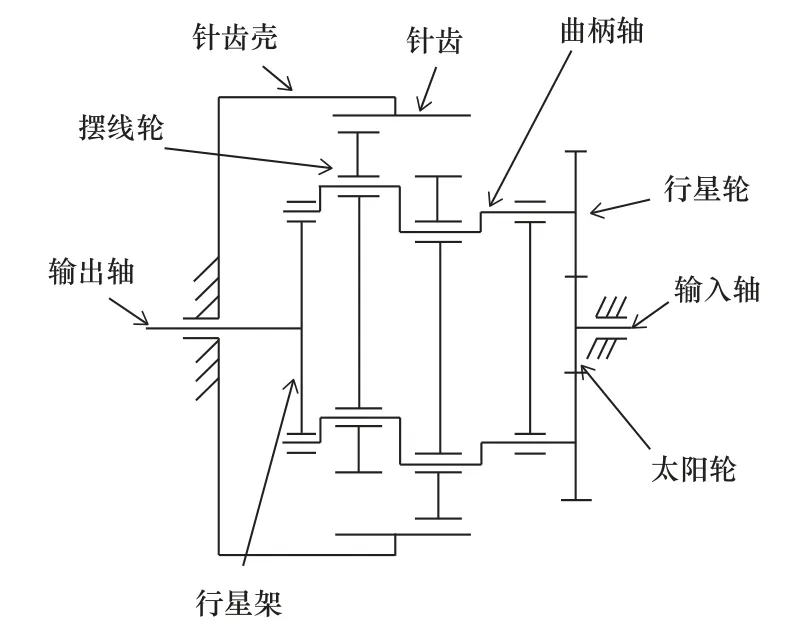
圖1 RV 減速器機構(gòu)簡圖
1.1 目標函數(shù)
1.1.1 傳動效率
RV 減速器整機傳動效率為
式中:x取值為1 或-1[14],當時,x=1;當時,取x=-1。RV 減速器傳動比一般比較大,所以為原始機構(gòu)的傳動效率,。其中:;fz是指齒輪嚙合摩擦系數(shù),一般取0.035[15];n為行星輪的數(shù)目,本文以RV-40E 減速器為例,n取2。
式中:Kz=3-2K1,K1為短副系數(shù)。
將式(3)和式(4)代入式(1),可得:
因此RV 減速器傳動效率目標函數(shù)為
1.1.2 承載能力
針對RV 減速器承載能力的優(yōu)化,以減少針齒的最大承載能力為目標[16],擺線針輪的最大嚙合力Fmax是決定承載能力的主要因素。
計算擺線針輪的最大嚙合力的步驟如下。
(1)計算每個嚙合點處法向方向的初始間隙[17]。
式中:?rrp為等距修形量;?rp為移距修形量;?i為第i個針齒相對于轉(zhuǎn)臂的轉(zhuǎn)角,即?i=360/(Zd+1),當?i=arccosK1時,此處的輪齒受力最大[18]。
(2)每個嚙合點處的法向總位移δi[19]。
式中:δmax為受力最大的一對齒的總變形量[19];wmax為接觸變形;fmax為針銷彎曲變形。
式中:B的取值,二支點針齒銷為31/64,三支點針齒銷為7/128[20];L為針齒銷的長度,值為L=2b;E為彈性模量,取E=2.06×105MPa[21];u為泊松比,取u=0.3[22];Fmax為受力最大一對齒的嚙合力。其中 ρc的公式為[23]
(3)計算同時嚙合的齒數(shù)。
將 ??i和 δi進行比較。滿足公式(12)的輪齒都進入嚙合狀態(tài)。
(4)擺線針輪的最大嚙合力計算[24]。
式中:T為負載轉(zhuǎn)矩;為擺線輪節(jié)圓半徑,;n,m表示第n個齒到第m個齒是同時嚙合的;li為第i個針齒的力臂,公式如下[26]。
求Fmax需要先求δmax,而求δmax需要計算Fmax,因此需要賦予最大嚙合力初始值。變量參數(shù)每一次迭代更新,都需重復一次最大嚙合力計算過程,直到設(shè)置的最大迭代次數(shù)為止。
擺線針輪嚙合力初始值F0為[27]
因此RV 減速器承載能力優(yōu)化的目標函數(shù)為
綜上所述,可以得出RV 減速器多目標優(yōu)化目標函數(shù)為
1.2 設(shè)計參數(shù)
針對RV 減速器傳動效率和承載能力的優(yōu)化,除需考慮擺線修形涉及的參數(shù)之外,還需要考慮其他有關(guān)設(shè)計參數(shù)。從傳動效率公式(5)和最大嚙合力計算公式(13)來看,與優(yōu)化目標相關(guān)的設(shè)計參數(shù)包括:短幅系數(shù)K1、太陽輪齒數(shù)Zs、針齒半徑rrp、擺線輪厚度b、移距修形量?rp、等距修形量?rrp、擺線輪齒數(shù)Zd和針齒中心圓半徑rp。
將參數(shù)表示為如下向量形式:
1.3 約束條件的建立
(1)針輪中心圓半徑rp。
為了防止優(yōu)化過程中RV 減速器的體積變化太大,需要對rp進行約束[28]。根據(jù)經(jīng)驗公式rp=,可得約束條件為
(2)擺線針輪嚙合不頂切。
為了使擺線針輪齒廓不發(fā)生尖角和頂切,擺線輪理論齒廓曲率半徑系數(shù)的最小值amin必須大于針齒套半徑與針輪中心圓半徑的比值[3],即amin>rtp/rp,而amin=(1+K1)2/(1+K1+K1Zd),因此約束條件為
式中:rtp為針齒套半徑,因為RV-40E 針齒套半徑較小,所以和針齒做成一體,即rtp≈rrp。
(3)針徑系數(shù)K2。
K2影響了針齒分布的疏密程度,本文以RV-40E 減速器為例,針輪齒數(shù)在40 左右,所以K2比較合理的取值范圍為1.1~1.8[29]。
則針徑系數(shù)K2的約束條件為
(4)短副系數(shù)K1。
短副系數(shù)K1影響擺線輪的齒廓曲線和承載能力、減速器傳動的性能以及是否會發(fā)生頂切。RV-40E減速器的擺線輪齒數(shù)一般在25~59,因此K1的合理取值在0.65~0.9[30]。得到短副系數(shù)K1的約束條件為
(5)擺線輪厚度。
擺線輪厚度b一般按照(0.1~0.2)rp來取值[31],因此擺線輪厚度的約束條件為
(6)最大接觸應力。
由赫茲接觸理論可得[32]:
式中:Ee為當量彈性模量,由于擺線針輪的彈性模量一樣,Ee=E=2.06×105MPa;擺線針輪的材料是GCr15,σHP一般取1 300~1 500 MPa 比較適宜[33]。
(7)等距和移距修形量。
為了防止等距修形量過大而導致降低RV 減速器的傳動精度和同時嚙合齒數(shù),需要對等距和移距修形量進行約束[21]。
2 基于TOPSIS 和CRITIC 相結(jié)合的多目標決策
CRITIC 權(quán)重法是基于判斷指標間的變異性和沖突性的綜合衡量來進行權(quán)重賦予,這符合RV 減速器承載能力和傳動效率之間相互矛盾的性質(zhì)。TOPSIS 法是通過歐式距離評判各方案的優(yōu)劣[34]。將TOPSIS 法和CRITIC 法相結(jié)合可以避免TOPSIS法權(quán)重一致性問題,最終得到的結(jié)果也更為客觀和符合RV 減速器實際情況。
設(shè)有n個評判對象,即Pareto 前沿分布圖中的點數(shù)和m個判斷指標,即優(yōu)化目標個數(shù),通過兩者可構(gòu)造一個判斷矩陣M:
式中:vij為第i個評價對象第j個判斷指標。為了進行后續(xù)的處理,將極大型數(shù)據(jù)(極值越大越佳)和極小型數(shù)據(jù)(極值越小越佳),將這兩種數(shù)據(jù)進行正向化處理,正向化的公式如下[35]。
極大值數(shù)據(jù)正向化:
極小值數(shù)據(jù)正向化:
為了消除判斷指標之間不同量綱的影響,需要對正向化后的矩陣進行標準化,即用正向化矩陣中的每一個元素除以其所在列的元素的平方和的開平方,公式如下:
實際中需要判斷指標應有的權(quán)重,因此需要對權(quán)重進行重新賦予。其中變異性和沖突性分別以標準差和相關(guān)系數(shù)的形式來表現(xiàn)。
沖突性系數(shù)Rj公式如下所示[36],其中Cij為判斷指標j和評判對象i之間的相關(guān)系數(shù)。
權(quán)重Wj見式(38)[36],顯然越大,判斷指標分配的權(quán)重也就越大,說明第j個指標在整個系統(tǒng)中的重要性越大。
對象評價得分計算公式如下:
評價得分最大的對象即為最優(yōu)解。結(jié)合TOPSIS 和CRITIC 權(quán)重法來對RV 減速器的多目標優(yōu)化結(jié)果來進行多目標決策,可以客觀地從Pareto最優(yōu)解集中選出最優(yōu)解。
3 實例優(yōu)化
以廣泛應用于工業(yè)機器人領(lǐng)域的RV-40E 減速器為例,傳動比121,輸出轉(zhuǎn)矩T1=307 000 N·mm,輸入轉(zhuǎn)速n0=40×121 r/min,輸入轉(zhuǎn)矩T0=2 918.66 N·mm。使用NSGA-Ⅱ多目標遺傳算法進行計算,設(shè)置初始種群大小為200,迭代次數(shù)為1 200,變異率為0.1,交叉率為0.9。
3.1 齒廓修形對優(yōu)化目標的影響
當齒廓修形作為變量時,仿真計算得到Pareto前沿分布如圖2 所示,橫坐標是目標函數(shù)minf1(x),即1 減去RV 減速器傳動效率,縱坐標是minf2(x),即擺線針輪的最大嚙合力Fmax。
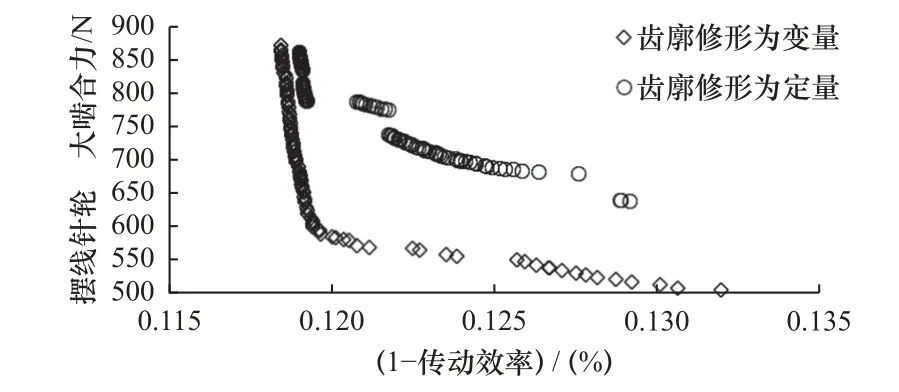
圖2 Pareto 前沿分布
由圖2 可知,齒廓修形對RV 減速器的傳動效率影響較小,對擺線針輪嚙合力影響較大。
當采用正等距或者負移距時,齒廓修形對嚙合力的影響如圖3 所示。
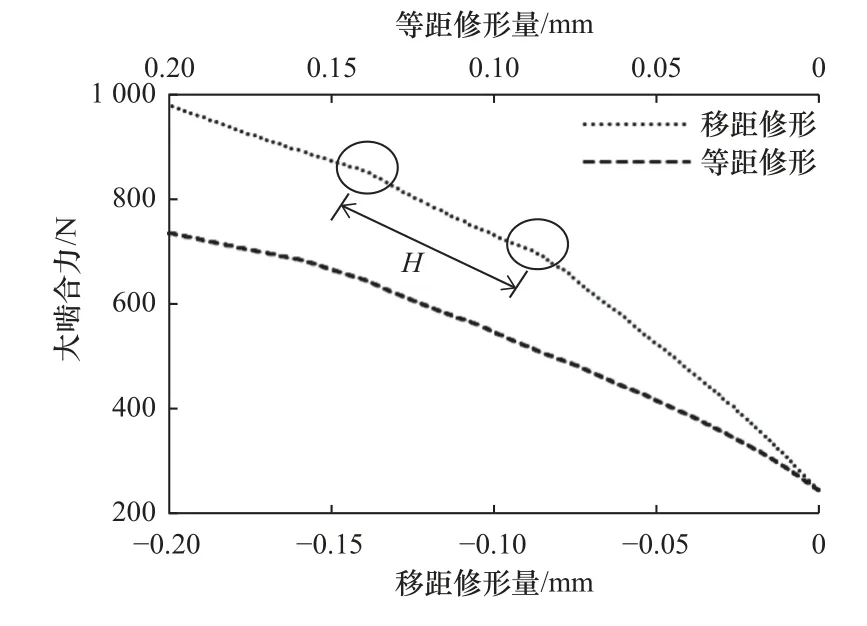
圖3 等距修形或移距修形對嚙合力的影響
由圖3 可知:
(1)相同的修形量情況下,負移距修形對嚙合力的影響比正等距修形顯著。
(2)圖中兩曲線的每一個拐點代表了同時嚙合齒數(shù)的變化節(jié)點,即圖中H區(qū)間的同時嚙合齒數(shù)是相同的。隨著修形量增大,H區(qū)間不斷增大,修形對嚙合力的影響也逐漸減小。
當采用“移距–等距”時,齒廓修形對嚙合力的影響如圖4 所示。
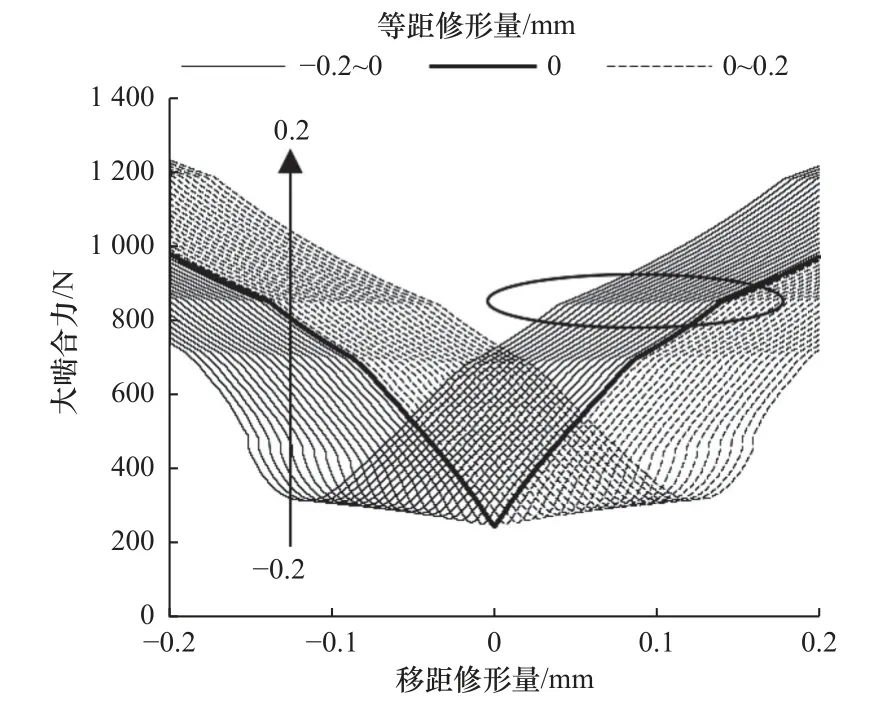
圖4 “移距–等距”修形對嚙合力的影響
由圖4 可知:
(1)圖中的拐點均代表同時嚙合齒數(shù)的變化節(jié)點,在相同嚙合力的情況下,隨著等距修形量變化,曲線的拐點向著負移距修形量減小的方向平移。即等距修形可以提高移距修形對擺線針輪最大嚙合力的影響程度。因此,采用等距–移距的組合修形方法對優(yōu)化效果的影響更為顯著,能以更小的修形量來降低嚙合力。
(2)“負移距–負等距”和“正移距–正等距”可以找到嚙合力的最低點,即每條曲線的轉(zhuǎn)折點,此時的輪廓接近擺線輪理想齒廓,嚙合齒數(shù)接近一半。
(3)“負移距–正等距”或“正移距–負等距”修形的修形量對嚙合力的影響相對于“負移距–負等距”和“正移距–正等距”較為平緩,齒廓修形設(shè)計更為容易。
3.2 最優(yōu)化結(jié)果分析
RV 減速器的體積計算公式如下[37]:
式中:ba為行星輪厚度;Za為行星輪齒數(shù);?1為擺線輪之間的間隔。
在最優(yōu)解范圍內(nèi),體積、傳動效率和擺線針輪最大嚙合力的變化情況如圖5 所示。
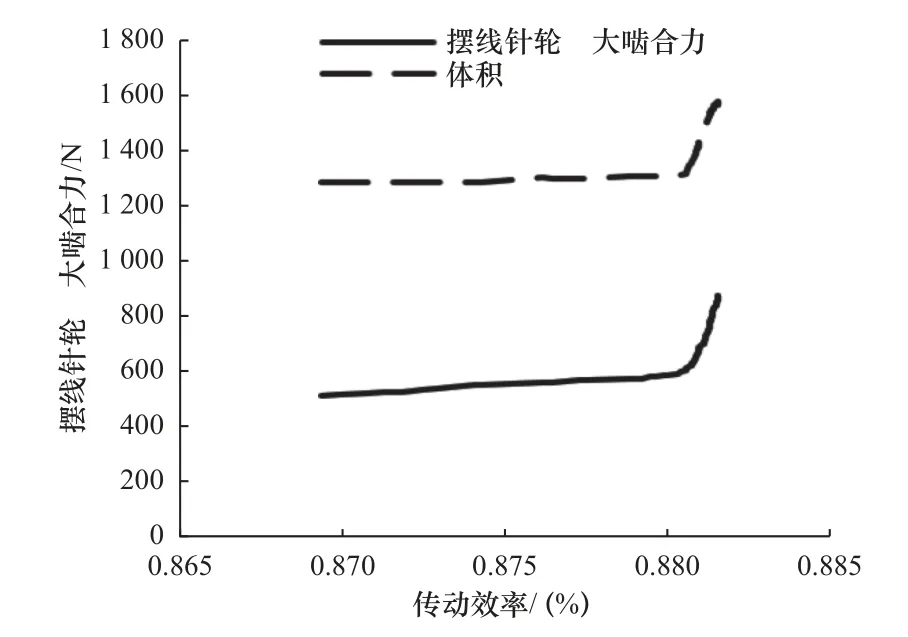
圖5 體積、傳動效率和最大嚙合力變化
可見隨著擺線針輪嚙合力的減小,減速器的體積也具有減小的趨勢,傳動效率也會逐漸降低。當傳動效率提高至88 %左右時,擺線針輪嚙合力和整機體積上升得很快。
根據(jù)前述基于TOPSIS 和CRITIC 相結(jié)合的多目標決策方法可得到最優(yōu)解為minf1(x)=0.1211,minf2(x)=570.1608。優(yōu)化參數(shù)圓整后可得最優(yōu)解為minf1(x)=0.1211,minf2(x)=572.3657。通過獲取最優(yōu)解相對應的各參數(shù)值,可得優(yōu)化前后結(jié)果對比,見表1。
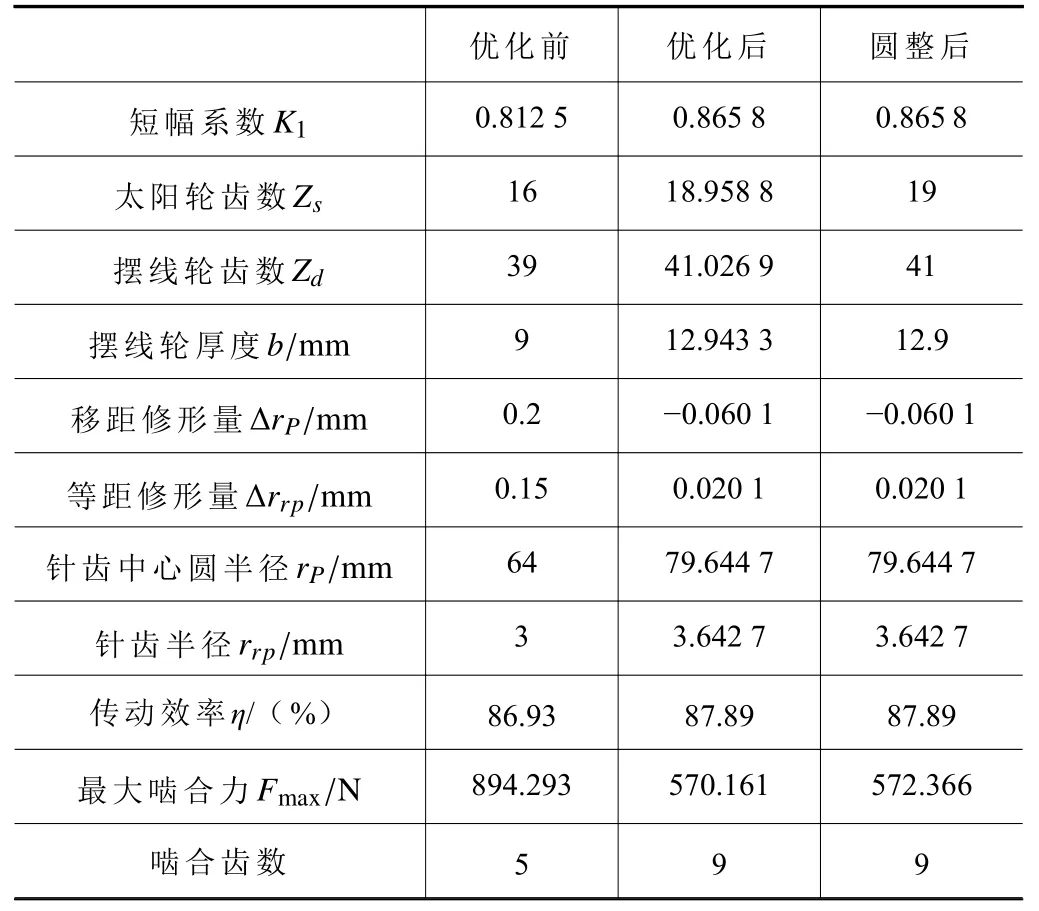
表1 優(yōu)化前后結(jié)果對比表
由表1 可清晰得到,經(jīng)過多目標優(yōu)化后,RV減速器的傳動效率提高了0.96%,擺線針輪傳動的最大嚙合力減小了321.927 N,同時嚙合的齒數(shù)也從5 個齒增加到了9 個齒。
由表1 可以看出,原始實例采用的是正等距–正移距相結(jié)合的修形,而優(yōu)化后采用的是正等距–負移距相結(jié)合的修形方式,與圖4 得到了分析結(jié)論相符合。
4 動態(tài)仿真分析
4.1 參數(shù)化建模
擺線輪齒廓通用擺線輪齒廓方程為[38]
使用NX 軟件得到圖6 所示優(yōu)化后的RV40 減速器傳動部分三維模型裝配圖。
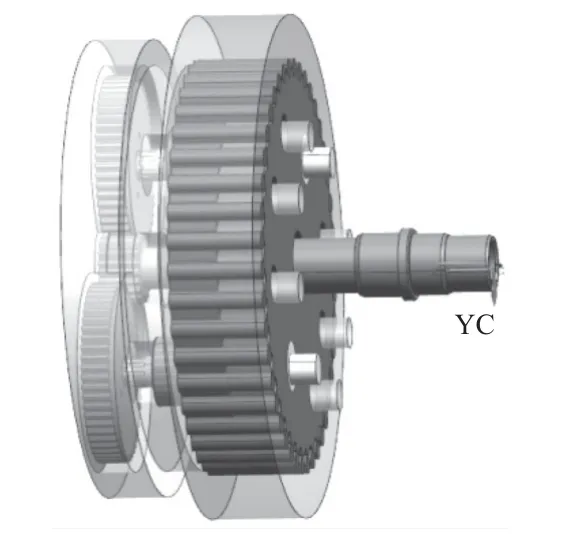
圖6 RV40 減速器傳動部分三維模型裝配圖
4.2 動態(tài)仿真分析
行星架質(zhì)心角速度如圖7 所示,可見行星架質(zhì)心角速度在240°/s 上下波動,即輸出轉(zhuǎn)速n1=40 r/min,由上述已知輸入轉(zhuǎn)速n0為40×121 r/min,可得仿真模型的傳動比為121,驗證了RV 減速器的三維模型的正確性。
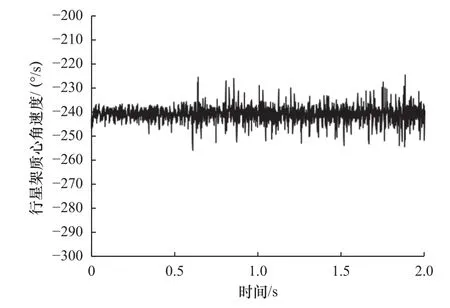
圖7 行星架質(zhì)心角速度
RV-40E 減速器優(yōu)化前后擺線針輪嚙合力變化如圖8 所示,擺線輪的角速度為40 r/min,即1.5 s旋轉(zhuǎn)一圈。可以看出優(yōu)化前擺線針輪最大嚙合力接近900 N,優(yōu)化后擺線針輪最大嚙合力為570 N 左右,驗證了采用NSGA-Ⅱ遺傳算法,以擺線針輪的最大嚙合力Fmax最小和整機傳動效率 η最高來進行多目標優(yōu)化是可行的。
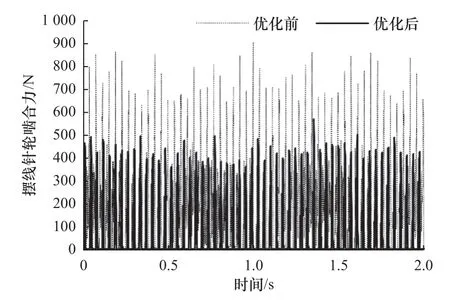
圖8 優(yōu)化前后擺線針輪嚙合力仿真結(jié)果
行星架和擺線輪質(zhì)心角加速度優(yōu)化前后變化如圖9 所示,曲線波動的幅值越大,能量損失越大。由圖9 可以看出,優(yōu)化后的行星架和擺線輪的質(zhì)心角加速度曲線波動更小,整機的傳動也更為平穩(wěn)。
中心輪和行星輪質(zhì)心角加速度優(yōu)化前后變化如圖10 所示,優(yōu)化后的中心輪和行星輪的角加速度上下波動的幅值更小,嚙合傳動時的振動也會比優(yōu)化前減小。
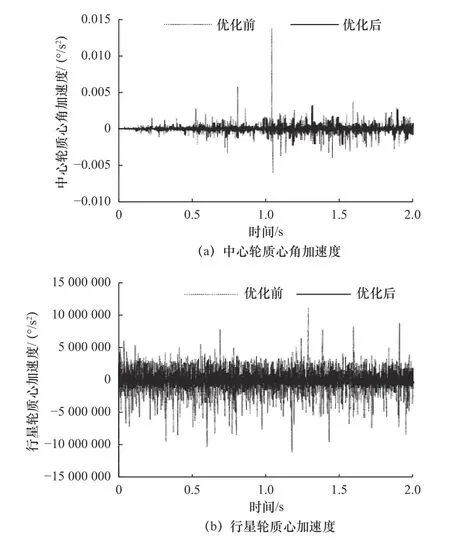
圖10 優(yōu)化前后中心輪和行星輪質(zhì)心角加速度
5 結(jié)語
(1)提出一種基于承載能力和傳動效率優(yōu)化的RV 減速器擺線輪齒廓“負移距–正等距”或“正移距–負等距”的組合修形方法。建立了以承載能力和傳動效率為優(yōu)化目標的RV 減速器數(shù)學模型,使用NSGA-Ⅱ遺傳算法以及TOPSIS 和CRITIC相結(jié)合的多目標決策方法求解得到了最佳優(yōu)化方案。
(2)采用等距–移距的組合修形方法對優(yōu)化效果的影響更為顯著,能以更小的修形量來降低嚙合力。
(3)“負移距–正等距”或“正移距–負等距”的修形量對嚙合力的影響相對于“負移距–負等距”和“正移距–正等距”較為平緩,齒廓修形設(shè)計更為容易。
(4)使用NX 軟件對RV 減速器進行參數(shù)化建模和動態(tài)仿真分析,結(jié)果發(fā)現(xiàn)擺線針輪最大嚙合力的仿真結(jié)果與理論值基本吻合。通過分析優(yōu)化前后行星架、擺線輪、中心輪和行星輪的角加速度發(fā)現(xiàn)優(yōu)化后整機的傳動更為平穩(wěn),動態(tài)性能得到了提升。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
