基于深度強(qiáng)化學(xué)習(xí)算法的機(jī)器人浮動(dòng)打磨執(zhí)行裝置研究
2023-11-15 08:08:56張一然李長(zhǎng)耿
制造技術(shù)與機(jī)床 2023年11期
關(guān)鍵詞:深度
張一然 楊 龍 袁 博 李長(zhǎng)耿
(中車青島四方機(jī)車車輛股份有限公司,山東 青島 266111)
近年來,隨著機(jī)械加工產(chǎn)品精度質(zhì)量要求的提高和國內(nèi)制造業(yè)的發(fā)展,機(jī)器人打磨拋光技術(shù)成為我國重要的發(fā)展方向之一[1-3]。傳統(tǒng)的打磨拋光主要以手工操作為主,不僅會(huì)使工人面對(duì)打磨拋光產(chǎn)生的噪音和粉塵污染,而且難以保證打磨質(zhì)量的一致性。使用工業(yè)機(jī)器人打磨可以保證打磨過程的可重復(fù)性,代替工人參與打磨的惡劣環(huán)境,并且可以消除人為誤差,保證打磨精度和一致性[4-5]。然而,由于機(jī)器人打磨執(zhí)行器與打磨工件為剛性接觸,在打磨過程中容易造成打磨接觸力的不穩(wěn)定,甚至損壞工件。因此,打磨力的柔順穩(wěn)定控制是影響機(jī)器人打磨質(zhì)量?jī)?yōu)劣的關(guān)鍵因素[6-7]。
針對(duì)機(jī)器人打磨的柔順力控問題,國內(nèi)外學(xué)者開展了相關(guān)研究[8-11]。目前,柔順力控方法主要包括主動(dòng)柔順控制和被動(dòng)柔順控制。被動(dòng)柔順方法往往采用簡(jiǎn)單的彈簧機(jī)構(gòu)進(jìn)行柔順,對(duì)簡(jiǎn)單零件的平面打磨有一定適用性。但被動(dòng)柔順方法不能精確地控制打磨接觸力,在對(duì)復(fù)雜曲面零件進(jìn)行打磨時(shí),打磨效果不佳。因此,Nagata F[12]提出了基于力位混合控制的機(jī)器人主動(dòng)柔順力控打磨方法,實(shí)現(xiàn)了高精度的機(jī)器人曲面零件拋光。許家忠等[13]提出了一種基于自適應(yīng)阻抗控制的機(jī)器人柔順力控方法,并將其應(yīng)用于復(fù)合材料工件打磨,獲得了較好的打磨效果。然而,采用機(jī)器人主動(dòng)柔順力控算法進(jìn)行打磨力控制,往往因難以獲得機(jī)器人的精確模型而實(shí)現(xiàn)高實(shí)時(shí)性和魯棒性的控制,導(dǎo)致力控精度和響應(yīng)速度不佳[14]。
針對(duì)工業(yè)機(jī)器人存在的接觸力難以恒定控制問題,為了實(shí)現(xiàn)打磨接觸力的恒定,本文提出一種用于機(jī)器人末端的浮動(dòng)打磨執(zhí)行器。對(duì)浮動(dòng)打磨執(zhí)行器進(jìn)行了結(jié)構(gòu)設(shè)計(jì),并進(jìn)行了力控系統(tǒng)建模分析和控制算法設(shè)計(jì);最后進(jìn)行了恒力跟蹤試驗(yàn),驗(yàn)證了裝置的恒力控制精度。
1 浮動(dòng)打磨執(zhí)行器工作原理與結(jié)構(gòu)設(shè)計(jì)
1.1 浮動(dòng)打磨執(zhí)行器工作原理
浮動(dòng)打磨執(zhí)行器的工作原理如圖1 所示。浮動(dòng)打磨執(zhí)行器作為一種主動(dòng)柔順力控裝置,需要額外的驅(qū)動(dòng)裝置提供動(dòng)力輸出。氣壓驅(qū)動(dòng)相比于液壓和電磁驅(qū)動(dòng),具有結(jié)構(gòu)緊湊、氣源易獲得、壓縮性大等優(yōu)點(diǎn),因此選用以氣缸為主要?jiǎng)恿υ臍鈮候?qū)動(dòng)方式實(shí)現(xiàn)力的主動(dòng)控制。氣源提供氣體,經(jīng)由比例閥實(shí)現(xiàn)氣體流量的控制,進(jìn)而實(shí)現(xiàn)氣缸內(nèi)部壓力和打磨頭接觸力的控制。力傳感器實(shí)時(shí)測(cè)量打磨頭接觸力,控制系統(tǒng)根據(jù)反饋的打磨頭接觸力,調(diào)整比例閥開口大小,實(shí)現(xiàn)打磨力的閉環(huán)控制。

圖1 浮動(dòng)打磨執(zhí)行器的原理
1.2 浮動(dòng)打磨執(zhí)行器結(jié)構(gòu)設(shè)計(jì)
圖2 所示為機(jī)器人浮動(dòng)打磨末端執(zhí)行器的結(jié)構(gòu)示意圖。考慮到運(yùn)動(dòng)的一致性,選用兩個(gè)相同規(guī)格、內(nèi)部帶有磁環(huán)的氣缸作為驅(qū)動(dòng)結(jié)構(gòu),以實(shí)現(xiàn)氣缸活塞位置的實(shí)時(shí)檢測(cè)。通過調(diào)節(jié)比例閥控制進(jìn)入氣缸兩腔的氣體體積進(jìn)而控制氣缸內(nèi)部壓力,從而控制輸出打磨力。直線導(dǎo)軌和滑塊提供浮動(dòng)自由度,與兩個(gè)氣缸對(duì)稱放置,以減小偏載力矩對(duì)控制性能的影響。浮動(dòng)打磨執(zhí)行器裝置通過機(jī)器人連接法蘭與機(jī)器人連接,通過打磨頭連接法蘭與力傳感器和打磨頭連接。力傳感器通過將實(shí)際打磨力實(shí)時(shí)反饋至控制系統(tǒng),實(shí)現(xiàn)打磨力的閉環(huán)控制。

圖2 浮動(dòng)打磨執(zhí)行器內(nèi)部結(jié)構(gòu)
2 浮動(dòng)打磨執(zhí)行器力控系統(tǒng)建模分析
2.1 受力分析
將浮動(dòng)打磨裝置分為浮動(dòng)部分和固定部分,進(jìn)行受力分析,如圖3 所示。假設(shè)此時(shí)重力方向與打磨法向的夾角為θ,裝置浮動(dòng)部分的總質(zhì)量為m。單個(gè)氣缸的無桿腔面積為A1,壓力為P1;有桿腔面積為A2,壓力為P2。浮動(dòng)打磨裝置與打磨工件之間的接觸力為Fn,摩擦力為Ff,打磨頭的位移為x。
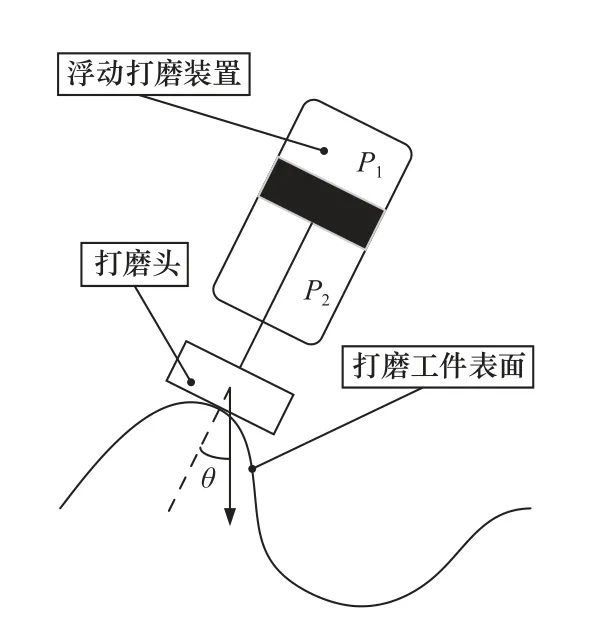
圖3 浮動(dòng)打磨裝置受力分析
根據(jù)牛頓第二定律,可以得到浮動(dòng)打磨裝置的力平衡方程為
式中:Gθ=mgcosθ,為裝置浮動(dòng)部分的重力在打磨表面法向上的分量。
2.2 力控系統(tǒng)建模分析
由比例閥進(jìn)行氣體壓力的調(diào)節(jié)。比例閥的輸出壓力P和輸入電壓U的關(guān)系可以表示為
式中:K1和k兩個(gè)參數(shù)與氣缸的特性有關(guān)。
對(duì)浮動(dòng)裝置受力分析得到的式(1)進(jìn)行拉普拉斯變換可以得到:
力控系統(tǒng)的控制框圖如圖4 所示。
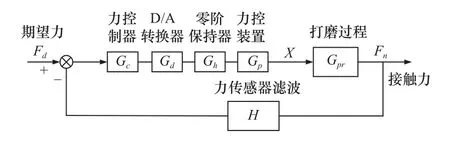
圖4 力控系統(tǒng)控制框圖
力控系統(tǒng)的開環(huán)傳遞函數(shù)可以表示為
式中:Gc為控制器的傳遞函數(shù);Gd為D/A 轉(zhuǎn)換器傳遞函數(shù);Gh為零階保持器;Gp為力控系統(tǒng)傳遞函數(shù);Gpr為打磨過程的傳遞函數(shù)。
當(dāng)浮動(dòng)打磨裝置與打磨工件接觸時(shí),打磨輸出力Fn可以使打磨頭產(chǎn)生位移x,其關(guān)系可以表示為
式中:Km、ωn、ζ分別為剛度、自然頻率和阻尼比。
將摩擦力Ff視為擾動(dòng),可得系統(tǒng)整體的傳遞函數(shù)為
至此,完成浮動(dòng)打磨力控系統(tǒng)建模。由式(6)可知,力控系統(tǒng)可以視為三階系統(tǒng),系統(tǒng)存在慣性環(huán)節(jié),需要設(shè)計(jì)控制算法以提高力控系統(tǒng)的控制性能。
3 基于深度強(qiáng)化學(xué)習(xí)算法參數(shù)整定的PID控制
3.1 傳統(tǒng)PID 控制
PID 控制算法是工業(yè)中技術(shù)成熟、應(yīng)用廣泛的一種控制算法[15-16],結(jié)合比例、積分和微分3 個(gè)環(huán)節(jié)于一體,以實(shí)現(xiàn)閉環(huán)系統(tǒng)的控制,其控制算法框圖如圖5 所示。
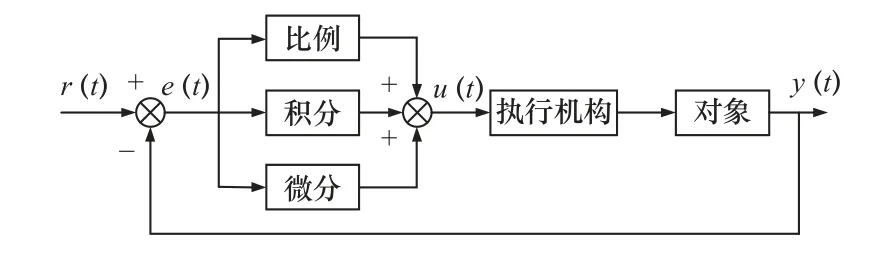
圖5 PID 控制算法圖
PID 控制算法基于誤差信號(hào)e(t)(即期望值r(t)與實(shí)際值y(t)之間的差異),向誤差信號(hào)減小的方向調(diào)整控制信號(hào)u(t),基于控制信號(hào)u(t)實(shí)現(xiàn)執(zhí)行機(jī)構(gòu)控制,進(jìn)而控制系統(tǒng)的實(shí)際輸出值y(t),使其盡可能接近期望輸出值。在浮動(dòng)打磨執(zhí)行器的浮動(dòng)打磨控制過程中,期望輸出值為用戶設(shè)定的期望打磨力,實(shí)際輸出值為打磨執(zhí)行器作用在工件上的實(shí)際打磨力,從而實(shí)現(xiàn)打磨力的控制。
PID 調(diào)節(jié)器的微分方程可表示為
式中:e(t)=r(t)-y(t)。
PID 調(diào)節(jié)的傳遞函數(shù)可表示為
PID 控制參數(shù)對(duì)系統(tǒng)性能影響較大[17-18],需要對(duì)比例環(huán)節(jié)、積分環(huán)節(jié)和微分環(huán)節(jié)進(jìn)行分析。
(1)比例環(huán)節(jié):通過比例參數(shù)與誤差信號(hào)的乘積產(chǎn)生控制信號(hào),按比例調(diào)節(jié)使誤差信號(hào)減小。選擇較大的比例系數(shù)往往會(huì)減小系統(tǒng)的穩(wěn)態(tài)誤差和上升時(shí)間,提升系統(tǒng)的控制精度和反應(yīng)時(shí)間。但過大的比例系數(shù),也會(huì)相應(yīng)地提高系統(tǒng)的超調(diào)量,產(chǎn)生系統(tǒng)震蕩。
(2)積分環(huán)節(jié):僅調(diào)節(jié)比例系數(shù),無法消除系統(tǒng)的穩(wěn)態(tài)誤差,因此需要引入積分環(huán)節(jié)。增大積分系數(shù),往往會(huì)降低系統(tǒng)的上升時(shí)間,改善提高系統(tǒng)的穩(wěn)態(tài)性能。但過大的積分系數(shù),容易使系統(tǒng)產(chǎn)生震蕩,影響系統(tǒng)的穩(wěn)定性。
(3)微分環(huán)節(jié):通過預(yù)測(cè)偏差的變化趨勢(shì)對(duì)系統(tǒng)調(diào)整,從而達(dá)到超前的控制效果。
3.2 DDPG 深度強(qiáng)化學(xué)習(xí)算法
深度強(qiáng)化學(xué)習(xí)算法是將深度學(xué)習(xí)和強(qiáng)化學(xué)習(xí)結(jié)合起來的算法[19-22]。深度學(xué)習(xí)在感知問題上具有強(qiáng)大的理解能力,而強(qiáng)化學(xué)習(xí)具有強(qiáng)大的決策能力。深度強(qiáng)化學(xué)習(xí)融合了兩者的優(yōu)點(diǎn),具有強(qiáng)大的感知和決策能力,在研究中廣泛得到應(yīng)用[23]。深度強(qiáng)化學(xué)習(xí)算法框架如圖6 所示。智能體作為一個(gè)可以獲取環(huán)境狀態(tài)作的實(shí)體,首先觀察環(huán)境狀態(tài),并根據(jù)經(jīng)驗(yàn)策略進(jìn)行下一步的動(dòng)作。智能的動(dòng)作可以對(duì)環(huán)境狀態(tài)產(chǎn)生改變,環(huán)境狀態(tài)發(fā)生改變后會(huì)反饋智能體獎(jiǎng)勵(lì)值,智能體根據(jù)獎(jiǎng)勵(lì)值對(duì)經(jīng)驗(yàn)策略進(jìn)行優(yōu)化,以在之后獲取更高的獎(jiǎng)勵(lì)值。如此反復(fù)進(jìn)行迭代學(xué)習(xí),最終獲得滿足要求的智能體和策略。

圖6 深度強(qiáng)化學(xué)習(xí)算法框架圖
DDPG 算法是將Actor-Critic 算法和DQN 算法結(jié)合起來、應(yīng)用于連續(xù)控制領(lǐng)域的一種深度強(qiáng)化學(xué)習(xí)算法[21-24],適用于狀態(tài)空間連續(xù)和動(dòng)作空間連續(xù)的問題,其算法原理圖如圖7 所示。
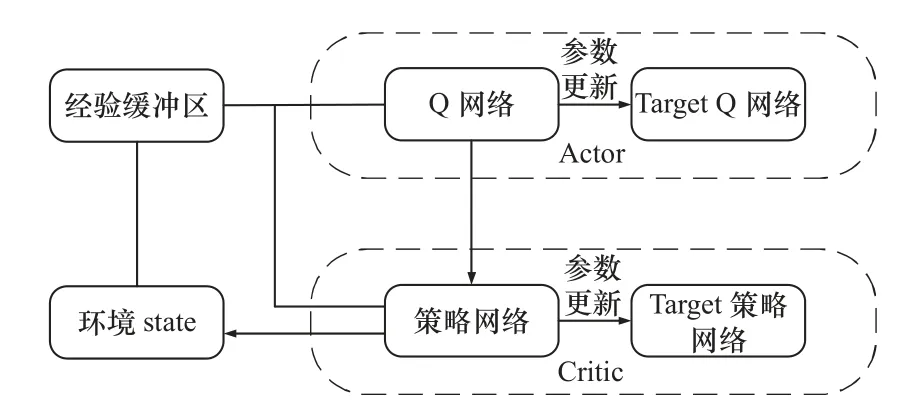
圖7 DDPG 算法原理圖
DDPG 深度強(qiáng)化學(xué)習(xí)算法首先初始化Actor 網(wǎng)絡(luò)和Critic 網(wǎng)絡(luò),并生成一組同樣參數(shù)的目標(biāo)網(wǎng)絡(luò)。Actor 網(wǎng)絡(luò)在與環(huán)境交互后,將其狀態(tài)、動(dòng)作、獎(jiǎng)勵(lì)和下一時(shí)刻的狀態(tài)記錄在經(jīng)驗(yàn)緩沖區(qū)內(nèi),然后從經(jīng)驗(yàn)緩沖區(qū)中生成新的狀態(tài)、動(dòng)作、獎(jiǎng)勵(lì)和下一時(shí)刻的狀態(tài)信息,并在Critic 網(wǎng)絡(luò)中計(jì)算Q值,并按照Q值最大的方向進(jìn)行Actor 網(wǎng)絡(luò)參數(shù)的修正。最后將目標(biāo)網(wǎng)絡(luò)與主網(wǎng)絡(luò)參數(shù)同步,進(jìn)行下一輪的迭代處理。
相比于其他參數(shù)優(yōu)選算法,DDPG 算法能在連續(xù)的動(dòng)作空間確定地選擇唯一的動(dòng)作。而參數(shù)調(diào)整是基于高維狀態(tài)空間以及連續(xù)動(dòng)做決策的,因此采用DDPG 算法可以很好地完成參數(shù)優(yōu)選問題,進(jìn)而更適用于浮動(dòng)打磨執(zhí)行器的柔順控制。
3.3 基于DDPG 算法的PID 控制參數(shù)整定
PID 參數(shù)對(duì)控制系統(tǒng)的控制性能影響很大,因此選取合適的PID 控制參數(shù)是影響控制效果優(yōu)劣的關(guān)鍵。在大多數(shù)工業(yè)場(chǎng)合,PID 控制參數(shù)的選取依靠經(jīng)驗(yàn)進(jìn)行試選,從中選取一個(gè)合適的值。然而本文設(shè)計(jì)的浮動(dòng)打磨裝置,具有強(qiáng)耦合和非線性的特性,僅依靠經(jīng)驗(yàn)進(jìn)行PID 控制參數(shù)整定,往往難以取得較好的控制效果且效率低下。DDPG 深度強(qiáng)化學(xué)習(xí)算法適用于在連續(xù)狀態(tài)空間和動(dòng)作空間中尋找最優(yōu)解,可用于PID 控制參數(shù)整定,其原理框圖如圖8 所示。

圖8 基于DDPG 算法的PID 參數(shù)整定原理框圖
采用DDPG 深度強(qiáng)化學(xué)習(xí)算法進(jìn)行PID 控制參數(shù)整定步驟如下。
步驟1:首先進(jìn)行DDPG 的網(wǎng)絡(luò)初始化,設(shè)置網(wǎng)絡(luò)相關(guān)參數(shù)和PID 參數(shù)初值,并且設(shè)置輸出的PID 參數(shù)范圍,以避免不合理的PID 控制參數(shù)可能引起的較差的控制效果。
步驟2:Actor 網(wǎng)絡(luò)將打磨過程中的性能指標(biāo)作為獎(jiǎng)勵(lì)信息,與新的狀態(tài)信息放入經(jīng)驗(yàn)緩沖區(qū)中,并在Critic 網(wǎng)絡(luò)中計(jì)算Q值,并按照Q值最大的方向更新Actor 網(wǎng)絡(luò)和Critic 網(wǎng)絡(luò),完成此次DDPG算法的迭代學(xué)習(xí)。
步驟3:DDPG 算法輸出PID 控制參數(shù)值到PID 控制器中,進(jìn)行一次打磨過程。計(jì)算此次打磨過程的性能指標(biāo),包括力偏差均值、力偏差均方差值和上升時(shí)間,并將性能指標(biāo)以狀態(tài)向量的形式輸入到DDPG 算法。
步驟4:判斷此次打磨過程的性能指標(biāo)能否滿足控制性能要求,若滿足要求則輸出此次PID 控制參數(shù),結(jié)束迭代學(xué)習(xí);若不滿足要求,則重復(fù)步驟2 和步驟3,進(jìn)行下一次迭代學(xué)習(xí)。
4 浮動(dòng)打磨執(zhí)行器恒力性能驗(yàn)證
搭建圖9 所示的xPC Target 浮動(dòng)打磨執(zhí)行器實(shí)驗(yàn)平臺(tái),對(duì)本文設(shè)計(jì)的浮動(dòng)打磨執(zhí)行器進(jìn)行恒力控制性能驗(yàn)證。實(shí)驗(yàn)平臺(tái)主要由浮動(dòng)打磨執(zhí)行器、高速數(shù)據(jù)采集卡、PC 上位機(jī)和xPC 目標(biāo)下位機(jī)組成。實(shí)驗(yàn)平臺(tái)中,上位機(jī)軟件進(jìn)行控制參數(shù)的設(shè)定,并進(jìn)行打磨輸出力的實(shí)時(shí)曲線顯示;下位機(jī)采集浮動(dòng)打磨過程中的傳感器信號(hào)發(fā)送給上位機(jī),并依據(jù)上位機(jī)控制參數(shù)設(shè)定進(jìn)行打磨力的控制。實(shí)驗(yàn)過程中,保持打磨頭為開啟狀態(tài),通過給定階躍信號(hào)的打磨期望力,測(cè)量實(shí)際打磨力的跟隨情況,以測(cè)試打磨執(zhí)行器的恒力控制性能。
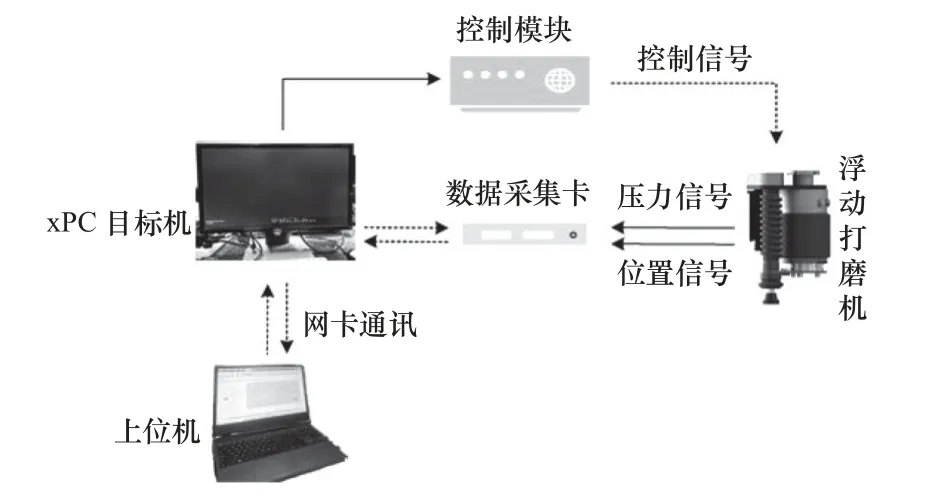
圖9 xPC Target 實(shí)驗(yàn)平臺(tái)
經(jīng)過多次手動(dòng)整定PID 參數(shù),設(shè)置比例參數(shù)為0.3、積分參數(shù)為0.05、微分參數(shù)為0.1,測(cè)試結(jié)果如圖10 所示。
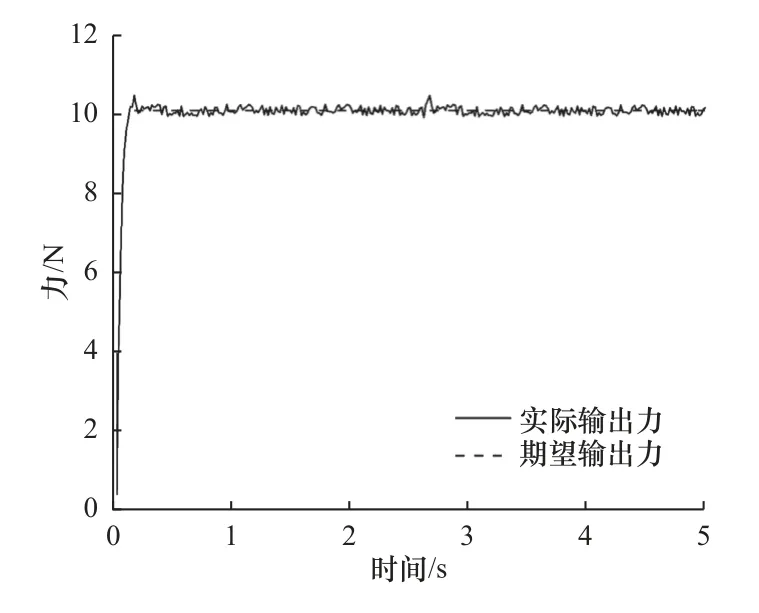
圖10 PID 控制實(shí)驗(yàn)曲線
試驗(yàn)結(jié)果表明,由于打磨頭的開啟,實(shí)際打磨力會(huì)產(chǎn)生一定程度的抖動(dòng),實(shí)際輸出力能較穩(wěn)定地跟隨期望輸出力。
基于DDPG 深度強(qiáng)化學(xué)習(xí)算法進(jìn)行PID 參數(shù)整定,進(jìn)行了打磨實(shí)驗(yàn)測(cè)試,測(cè)試過程開啟打磨頭,測(cè)試結(jié)果如圖11 所示。
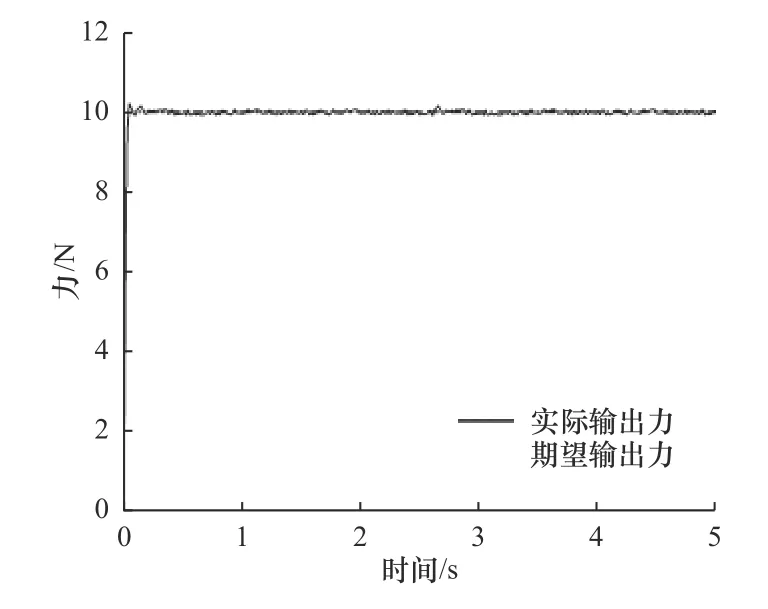
圖11 DDPG 參數(shù)整定后的PID 控制實(shí)驗(yàn)曲線
分別計(jì)算兩組實(shí)驗(yàn)輸出力數(shù)據(jù)的性能指標(biāo),包括實(shí)際輸出力與期望輸出力的偏差的均值、均方差以及實(shí)際輸出力的上升時(shí)間,結(jié)果見表1。
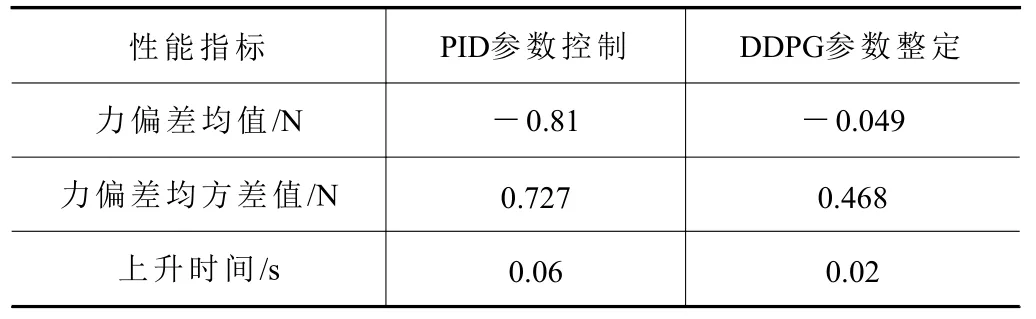
表1 輸出力性能指標(biāo)比較
由表1 中數(shù)據(jù)可知,采用DDPG 深度強(qiáng)化學(xué)習(xí)算法進(jìn)行PID 參數(shù)整定,獲得了更小的力偏差均值和均方差值以及更快的上升時(shí)間,從而具有更高的力控精度和響應(yīng)速度。
5 結(jié)語
本文面向機(jī)器人自動(dòng)化打磨拋光需求,進(jìn)行了浮動(dòng)打磨執(zhí)行器的結(jié)構(gòu)設(shè)計(jì)和力控系統(tǒng)建模分析,并開展浮動(dòng)打磨執(zhí)行器的控制方法設(shè)計(jì)。在傳統(tǒng)PID 控制算法的基礎(chǔ)上,采用DDPG 深度強(qiáng)化學(xué)習(xí)算法進(jìn)行PID 控制參數(shù)的整定,進(jìn)行了浮動(dòng)打磨執(zhí)行器恒力打磨實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,本文設(shè)計(jì)的浮動(dòng)打磨執(zhí)行器,在采用DDPG 算法進(jìn)行PID 控制參數(shù)整定后,獲得了較好的恒力控制性能,具有較強(qiáng)的力控精度和魯棒性,可以實(shí)現(xiàn)接觸力的實(shí)時(shí)監(jiān)測(cè)與恒力控制,可應(yīng)用于各種機(jī)器人自動(dòng)化打磨拋光領(lǐng)域。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57
