機器視覺技術在瓜菜檢測應用中的研究進展
2023-11-27 10:31:34戴軍
中國瓜菜 2023年11期
關鍵詞:檢測
戴 軍
(1.蘇州工業園區服務外包職業學院智能管理學院 江蘇蘇州 215123;2.同濟大學經濟與管理學院 上海 200092)
機器視覺技術主要通過算法模型計算目標圖像三維信息特征,自動對目標圖像信息進行智能化決策判斷,模擬學習人類視覺處理圖像信息的一門科學技術[1-3]。它融合了計算機科學、應用數學、統計學和運籌決策學等眾多交叉學科知識,成為當前人工智能應用領域的研究熱點,已經在無人駕駛、人臉識別、臨床醫學、航天軍工、化工紡織、材料工程、行政治理與農業監測等眾多領域實現了較為豐富的場景應用[4-10]。
機器能模仿人閱讀學習意味著機器在一定程度上已經具備了人類獲取外界信息形成自己知識儲備的自動化能力[11-12]。由于采集被測目標圖像的特征信息極為復雜,且存在光線強弱、背景陰影、觀察角度等諸多動態因素的影響,要讓機器真正達到像人類一樣輕松地識別目標檢測物,且能自如地感知捕捉目標物體的各種特征信息是一件極其困難的事情[13-16]。但機器視覺技術對目標圖像的數字化處理已經表現出了強大的智能化識別能力,例如在Image Net(目前世界最大的圖像識別數據庫)舉辦的世界機器視覺技術大賽上,機器視覺對目標圖像的識別水平曾經一度超越了人類視覺水平,體現出了機器視覺技術對目標物體檢測的極大潛能[17]。
近年來農業科學技術領域特別是瓜菜生產和種植方面也逐漸開始了機器視覺技術的應用探索研究,尤其是在一些大規模生產和種植環境或人工視覺難以達到識別要求的農業條件下,利用機器視覺技術代替人工視覺對瓜菜實施智能化檢測,通過機器換人不但提升了瓜菜生產和種植的規模化效率,而且能夠解決生產和種植人員的專業知識與技術經驗不足問題,機器視覺技術的檢測結果為瓜菜后續診斷防治和產銷工作提供靶向性指導具有十分重要的意義。
1 機器視覺的技術機理及其在瓜菜檢測應用中的邏輯機理
1.1 機器視覺的技術機理
通常來說,機器視覺系統主要由光學照明與成像系統模塊、信號采集與數字處理系統模塊、智能分析決策系統模塊和動力控制執行系統模塊等組成[18]。系統模塊具體包括各種電光源照明設備、光學鏡頭(定焦、變焦、定光圈等)、工業相機(CCD、CMOS 等)、圖像采集卡(PCI、ISA 等)、圖像數字化處理設備、各種監視器與傳感器、視頻與通信、輸入輸出單元等軟硬件構成(圖1)。機器視覺的檢測技術邏輯機理是依靠機器模擬人類的視覺功能,利用光學成像系統采集目標圖像信號,通過圖像信號數字化技術提取目標圖像信息特征,借助數學算法計算對目標檢測物實施精準定位與識別。其中目標圖像信號獲取與數字化處理分別是機器視覺系統的“視”技術與“覺”技術。“視”技術主要是通過工業相機等圖像拍攝設備獲取目標檢測物的各種圖像信號[19-20];“覺”技術主要是對采集送達的圖像信號實施數字化處理,包括對目標圖像的信號預處理、圖像定位與分割、圖像特征提取、信號模式分類、圖像語義理解等一系列層次處理[21-24],在基于預先設置的允許值等判別條件下輸出目標檢測物的最終分析結果,完成機器視覺技術對目標檢測物的智能化定位、識別、引導與執行等決策功能。
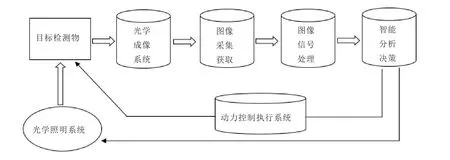
圖1 機器視覺的技術機理Fig.1 Technical mechanism of machine vision
1.2 機器視覺技術在瓜菜檢測應用中的邏輯機理
在自然因素以及人為因素共同影響下,瓜菜的生產和種植過程難免遭受不同程度的損害,如蟲害病害肆虐、水分養分缺失、植株生長變形等,嚴重影響瓜菜的產量、品質與安全性,因此實時、快速、精準的瓜菜檢測機制可以防患于未然。更為關鍵的是,機器可以7×24 h 全時段地對瓜菜實施監測,且能很好地識別害蟲的保護色與隱蔽性,圖像采集系統第一時間自動地捕捉瓜菜生病、生蟲、長勢不良等圖像信號,傳輸給數據處理系統實施數字化處理,為智能決策系統提供準確的損害特征信號,例如尺度大小、數量多少、莖稈粗細與植株高矮等圖像信息,為后續對癥防治和產銷對接工作提供靶向性對策(圖2)。傳統的純人工檢測瓜菜損害的方法效率較低,且生產和種植人員需要具備較強的專業性和豐富的經驗加以判斷。機器視覺技術相比純人工檢測能有效避免檢測的經驗性誤差,檢測結果更具客觀性且檢測效率較高,檢測成本大幅降低。因此,目前在瓜菜生產和種植過程的損害檢測方面,機器視覺技術逐漸得到了廣泛應用。
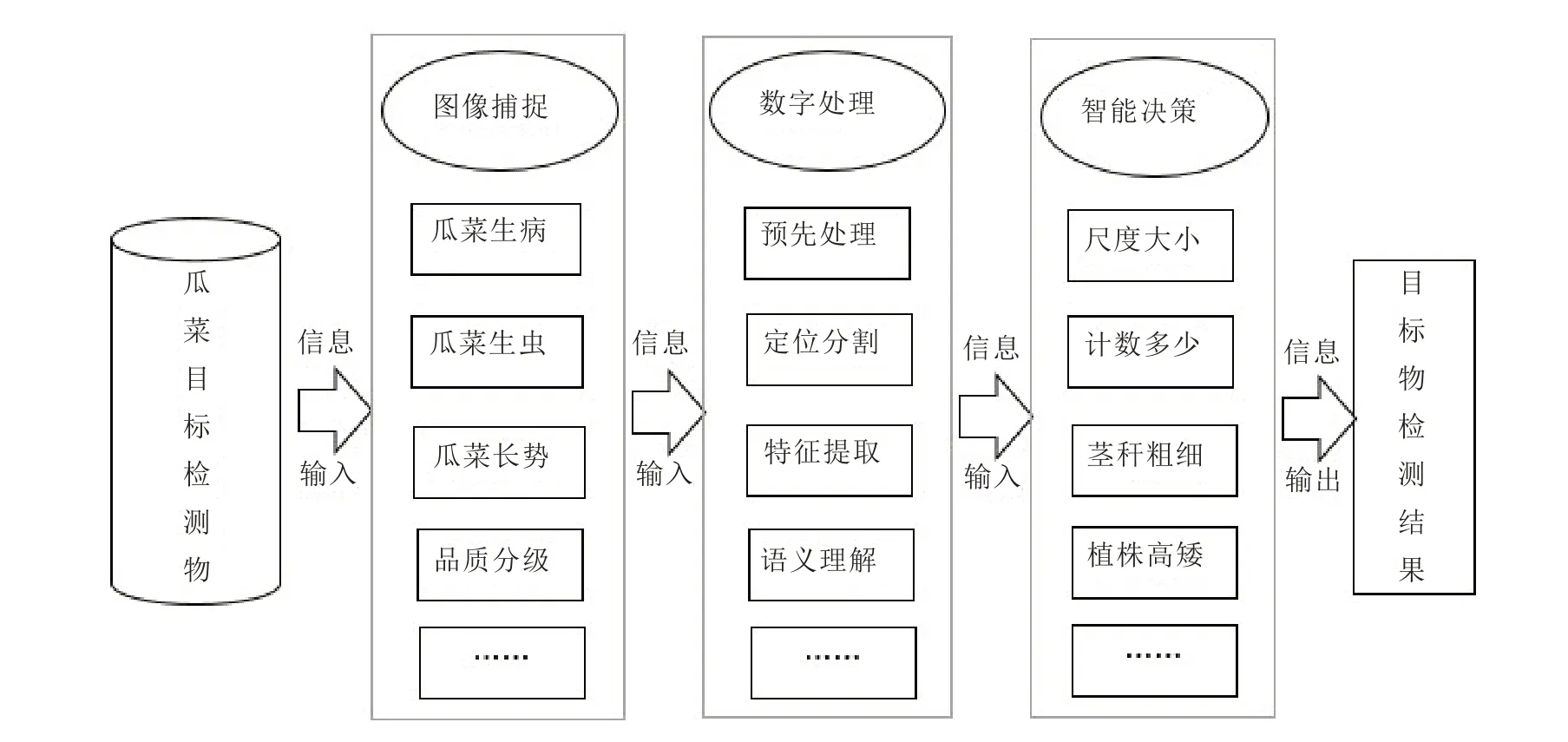
圖2 機器視覺技術在瓜菜檢測中的應用邏輯框架Fig.2 Application logic framework of machine vision technology for melon and vegetable detection
2 機器視覺技術在瓜菜檢測應用中的研究進展
基于內容分析方法對已有文獻統計梳理,發現當前機器視覺技術對瓜菜檢測的應用研究主要集中于4 個方面,一是應用于瓜菜病蟲害的識別檢測;二是應用于瓜菜長勢的信息檢測;三是應用于瓜菜品質的分級檢測;四是應用于瓜菜采摘的果實定位檢測。
2.1 病蟲害識別檢測
利用機器視覺的現代化技術對病蟲害實施預警、實時與快速識別檢測,不僅能夠替代用時長、費用高的人工檢測,而且在農作物生產和種植日趨規模化、產業化的今天是大勢所趨,對農業實現可持續發展具有非常重要的現實意義[25-28]。
為改善機器視覺技術對瓜菜病蟲害檢測系統預警機制,楊國武等[29]圍繞病蟲害發生的氣候因素進行統計分析,針對萵苣的霜霉病和菜青蟲這2 種主要病蟲害,設計了較為完善的病蟲害產生的氣候指標體系,在此基礎上建立了霜霉病和菜青蟲流行程度的短期預警和氣候年景長期預測模型。Da Silva 等[30]以農田現場溫度、地表溫度等氣候條件為研究要點,以每15 min 為1 個時間區間采集大量氣象分析數據,針對番茄的病蟲害構建了系統預警模型,試驗結果顯示病蟲害識別檢測的預警效果較為顯著。
在加強機器視覺技術對瓜菜病蟲害實時性監測方面,蔣國松等[31]針對蘆筍的病蟲害設計了在手機、電腦等移動終端可隨時隨地查看的線上監測系統,通過系統模型的實踐檢驗,方便了種植戶對蘆筍的病蟲害遠程監控。彭琛等[32]建立了以機器視覺技術融合發音報警功能于一體的蔬菜病蟲害監測系統,結合蔬菜生長的溫度、濕度和光照等因素開展實時分析與監測,監測系統突出了遠程監控和無線收發功能的應用,除了方便種植戶對蔬菜的管理,主要貢獻在于建立了消費者對蔬菜生長環境信息的實時了解渠道,緩解了消費者的購買顧慮,促進了消費能力的提高。
為了提升機器視覺技術對瓜菜病蟲害的識別精度,Mohanty 等[33]對20 余種病蟲害的5 萬多張信息采集圖像進行改進模型的識別對比,識別效果顯著提升,最高識別精度達到99.3%。朱莉等[34]改進了由Grab Cut 算法分割的最小外接矩形區域H/S直方圖,計算交叉匹配系數通過C4.5 分類器分類識別油菜蟲害,試驗結果顯示蟲害分類識別率達到92.0%。肖德琴等[35]優化了蔬菜蟲害的識別與計數算法,結合隨機森林算法模型對蟲害圖像分割和信號特征提取,蔬菜蟲害識別率可達到91.0%。Wang等[36]對葉片蟲害圖像用K-means 方法網格分割,利用自適應聚類方法再通過形態提取特征去掉葉脈,最終得到蟲害精準信息,識別有效精度達96.3%。Chen 等[37]結合卷積神經網絡CNN 對白菜蟲害進行圖像分割和計數分析,機器計數與人工計數的線性相關系數R2達到0.99,識別精度達到95.3%。He等[38]結合卷積神經網絡CNN 對12 種蔬菜蟲害對比檢測,結果表明利用SSD/Inception 檢測到的平均精確度最高,可達77.1%。Ye 等[39]結合形態學改進邊緣提取算法去除黃瓜圖像的噪聲,提高黃瓜圖像在復雜背景下的病蟲害檢測精度,試驗結果表明檢測準確率達到93.9%,誤分類率低于5.8%。郭慶文等[40]結合顯著圖注意力網絡模型檢測蔬菜蟲害,平均精度達86.4%,平均計數誤差為0.11 只,若模型移除顯著圖注意力模塊則機器視覺技術的平均精度降到82.4%左右,平均計數誤差升到0.32 只。徐境深等[41]將機器視覺技術結合極坐標與傅里葉變換方法,提取蔬菜病蟲害的顏色與外形特征實施快速識別,檢測結果的識別準確率達到99.0%,識別速度更是達到320 株·min-1。
綜上所述,機器視覺技術對瓜菜病蟲害檢測能起到一定的預警作用,能夠實施全天候的實時性監測,在識別精準度方面確實有著一定的檢測優勢。
2.2 長勢信息檢測
采用機器視覺技術檢測瓜菜長勢信息包括高矮粗細信息、顏色紋理信息等,利用數據處理系統對采集到的長勢圖像信號進行特征提取和識別分析,檢測結果可作為判斷瓜菜長勢強弱的依據,應用于瓜菜生長的實際診斷與環境調控[42-45]。
針對瓜菜不同的生長周期,杭騰等[46]利用機器視覺技術以番茄株高、莖粗與果實大小參數為檢測目標樣本信息,采集不同生長周期番茄的3 個檢測目標樣本的長勢圖像信息,對圖像信號進行中值濾波預處理,通過r-g 顏色因子自動閾值分割法提取圖像信號特征,建立長勢參數圖像特征值擬合函數。檢測結果表明番茄莖粗參數在幼苗、開花坐果與結果期的3 個周期內的相對檢測誤差分別介于1.73%~4.04%、0.64%~4.42%、0.46%~4.78%之間;而番茄株高參數和果實大小參數的相對檢測誤差則分別介于1.2%~6.5%、0.8%~3.1%之間。
為優化選擇最佳的生長環境條件,王泉清[47]研究認為,必須掌握溫室培養條件下的各種生長環境因素與蔬菜長勢之間的促進關系,優化選取出最有利于蔬菜長勢的最佳生長環境條件,才能達到蔬菜生產效能的最大化發揮。將機器視覺技術獲取的圖片信號經過數據處理系統處理后,再將檢測結果通過云計算分析得出蔬菜長勢與生長環境之間的參數關系,進而建立友好生長環境下蔬菜長勢檢測的成熟機制,生成最利于蔬菜成長的環境控制模式。
在瓜菜種苗出芽、嫁接苗愈合與無土栽培的檢測方面,張帆等[48]設計了一套視覺在線系統檢測種苗發芽率。基于機器視覺技術采集瓜菜種苗圖像,通過多視圖融合方法評估每個點位出苗可信度,根據可信度大小判斷發芽率高低,試驗結果驗證表明點位檢出率達100.0%,種苗發芽檢出率達95.2%。蘇穎欣等[49]以瓜類愈合期嫁接苗的接穗子葉長勢數據為檢測圖像樣本數據信息,利用機器視覺技術實時監測瓜類嫁接苗長勢狀況,試驗結果預計機器視覺技術檢測與接穗子葉人工觀察相比,至少可提前1~2 d 確定瓜類嫁接苗成活狀態。祝朝坤等[50]設計了一種基于機器視覺技術的無土栽培蔬菜種植系統,自動調節管控無土栽培環境下蔬菜生長所必需的參數變量,根據對蔬菜長勢狀態信息的實時化識別與判斷,針對不同生長階段供給蔬菜生長所需的不同營養液濃度和光照條件,能夠把生長所需的參數變量數值控制在預設范圍內,提高了無土栽培環境下蔬菜生長的安全保障。
將兩種及以上技術方法相融合更能提高瓜菜長勢信息檢測的準確性。吳瓊等[51]將光譜分析技術和機器視覺技術相結合,以菠菜、油菜、小白菜和娃娃菜4 種蔬菜葉片為檢測對象,分別采集在失水0、12、24、48 h 的4 種時間狀態下的葉片圖像信息,通過蔬菜葉片的外觀形態變化及其內部葉綠素變化的光譜曲線對比,實現對4 種蔬菜的4 種時間狀態下葉片鮮嫩程度的信息檢測,兩種技術方法綜合使用的試驗檢測效果非常顯著。豆東東等[52]將Lab 空間下K-means 分割法融合機器視覺技術,以30 株綠色蔬菜的第15、30 與45 天的葉面積大小為檢測圖像信息數據樣本,分成兩步驟對比檢測:一是相同蔬菜在不同時間的葉面積大小信息數據檢測;二是不同蔬菜在相同時間的葉面積大小信息數據檢測。共同檢測評估30 株蔬菜的長勢狀況,試驗過程既可獲取有效圖像分割也能輸出彩色圖像信號,樣本數據信息處理與檢測結果較為理想。進一步佐證了機器視覺技術與其他多種人工智能技術方法相融合,成為未來檢測瓜菜長勢信息的一個主要研究方向[53]。
綜上所述,機器視覺技術能夠比人工觀察更早、更及時地捕捉瓜菜長勢的細微變化,因此該技術用于檢測瓜菜長勢信息,可以很好地輔助瓜菜種植與管理人員做好提前決策與事先控制。
2.3 品質分級檢測
利用機器視覺技術進行綜合指標判斷后對農產品實施品質分級是一個新的技術應用嘗試,目前已廣泛應用到農產品的表觀品質分級檢測中,在計算機軟硬件與算法技術的創新發展幫助下,機器視覺技術在瓜菜品質分級檢測領域應具有廣闊的應用前景[54-58]。
在根莖類蔬菜的品質分級檢測方面,Tao 等[59]根據外觀顏色結合機器視覺技術,應用于區別正常馬鈴薯與發芽馬鈴薯(有毒)的品質分級檢測。孔彥龍等[60]以馬鈴薯的面積與周長為檢測參數,利用機器視覺技術對馬鈴薯進行外觀質量的品質分級檢測。為突破內部特征檢測瓶頸,田芳等[61]嘗試利用機器視覺技術結合透射光源系統創新性地對馬鈴薯黑心病進行試驗檢測,結果表明效果良好,檢測準確率可達96.0%。韓仲志等[62]基于機器視覺技術針對胡蘿卜須根、青頭與開裂等不同缺陷采用不同算法進行品質分級,試驗以520 份胡蘿卜須根、青頭與開裂圖像為樣本信息進行檢測,正確率分別達到81.8%、97.5%和92.3%,總體識別率達到91.3%。為對消費者負責,謝為俊等[63]指出胡蘿卜上市銷售前要剔除缺陷產品,采用機器視覺技術針對青頭、彎曲、斷裂、分叉和開裂等不同缺陷,結合了不同算法測試,檢測結果顯示機器對這些缺陷胡蘿卜的識別準確率分別為100.0%、91.1%、90.6%、94.6%和95.5%,檢測識別的總體準確率達到94.9%。
在葉類蔬菜的品質分級檢測方面,馮甲一[64]基于機器視覺技術采集小白菜的葉片圖像,以小白菜的葉片顏色、形狀和紋理等作為檢測信息樣本數據,利用MATLAB 軟件處理圖像信息,同時將主成分分析與Fisher 判別法相結合對葉片新鮮度實施品質分級檢測,試驗結果表明識別準確率達84.0%。徐海霞[65]將機器視覺技術應用于菠菜新鮮度品質分級檢測,采集貯藏期內菠菜圖像信息,建立菠菜新鮮度等級判別神經網絡模型,實現了對貯藏期內菠菜品質的有效檢測。魏文松等[66]研發了基于機器視覺技術的葉菜品質分級檢測系統,包括負壓吸氣樣品分離模塊、LED 光源照明模塊與氣吹式分選模塊,以320 份菠菜樣品為檢測對象,檢測結果顯示分選1 份葉菜樣品僅需0.84 s,總體判別正確率達到94.7%。
在水生蔬菜的品質分級檢測方面,馬京鳳[67]將機器視覺與形態學技術結合,降噪處理與閾值分割采集到的蓮藕圖像信號,以蓮藕彎曲度與長度為參數代入統一函數方程計算,結果作為蓮藕外觀檢測品質分級的標準,總體分級準確率達到85.0%。張文蓉等[68]基于機器視覺技術設計了茭白自動分級檢測設備系統,根據茭白大小、形狀、顏色等表觀特征進行品質分級,設備系統包含上料、分揀包裝與品質分級模塊等,設備系統穩定性良好,試驗結果顯示茭白品質分級的準確率達到95.6%。
在瓜類的品質分級檢測方面,張建華等[69]提出利用機器視覺技術結合連續凹點組方法,計算凹點組內最大曲率點鏈碼距離與歐氏距離比值,根據比值判斷瓜蒂質量與甜瓜品質,方法識別準確率達到92.0%。徐瑩瑩等[70]也提出根據瓜蒂質量判斷甜瓜品質,提出基于角點的檢測方法,利用瓜蒂表面的高曲率點集中分布特點準確識別瓜蒂質量,試驗結果顯示該方法快速有效且具較好的魯棒性。呂福香等[71]以甜瓜外觀直徑參數為檢測數據樣本,將機器視覺技術結合形態學和Spline 插值法處理甜瓜圖像信號,實現了根據甜瓜縱橫徑表征形態進行品質分級。王書志等[72]以紋理和顏色特征為檢測數據樣本,分析圖像可疑區并提取灰度共生矩陣特征參數,構建甜瓜品質分級檢測系統,檢測識別準確率達到92.2%。劉啟全等[73]采用機器視覺技術結合橢圓擬合算法對哈密瓜圖像提取橢圓特征,根據橢圓長軸與橢圓率計算結果基于大小標準評判品質分級,試驗識別準確率達到90.3%。
綜上所述,機器視覺技術對瓜菜的品質分級主要基于表觀特征的檢測,根據不同檢測目標需求結合恰當的算法模型,可以表現出較高的檢測識別準確率。而突破產品質地障礙深入瓜菜內部檢測,根據內部特征檢測結果實行品質分級的研究尚處于探索階段,未來應該會有更多更成熟的檢測手段出現。
2.4 采摘定位檢測
傳統人工采摘瓜菜工作雖然能夠保證采摘的質量,但勞動強度大、采摘效率低,而且人力成本高,這些因素嚴重制約著我國瓜菜產業的高質量發展。基于機器視覺技術對瓜菜果實實施精準定位,通過機器人實施瓜菜采摘作業,可以有效突破傳統人工采摘的瓶頸問題[74-77]。
在葫蘆科瓜果的采摘定位檢測方面,Edan 等[78]基于機器視覺模塊對笛卡爾型和圓柱型甜瓜采摘機器人仿真測試,試驗結果可以做到笛卡爾型機器人采摘甜瓜均速為1.3 s·個-1,圓柱型機器人采摘甜瓜均速為3.8 s·個-1。湯修映等[79]研制的黃瓜采摘機器人采用PC 機和運動控制卡配合機器視覺技術實現機械臂的多軸控制,試驗結果表明機器人采摘黃瓜成功率達到93.3%。王燕[80]研制的黃瓜采摘機器人采用DSP 上位機控制器+CAN 總線+DSP 關節控制器的分布式控制方案,通過充氣、放氣系統實現黃瓜的無損采摘,試驗結果表明果實定位精度達到2.4 mm,采摘成功率達到86%,平均耗時約18 s·根-1。張帆等[81]設計的黃瓜采摘機器人由視覺伺服系統、末端執行器及移動平臺構成,檢測結果表明該機器人果實識別準確率達95%,采摘黃瓜成功率達到85%,采摘平均速度為8 s·根-1,視覺系統定位最大誤差-7 mm。
在茄科蔬菜的采摘定位檢測方面,Bac 等[82-83]設計了一款基于機器視覺技術的甜椒采摘機器人,試驗結果表明,該機器人對甜椒的識別采摘成功率高達97%。王麗麗等[84-85]研發的番茄采摘機器人包括雙目視覺識別定位系統和智能導航系統等,試驗檢測表明對番茄果實的識別成功率高達99%,采摘成功率達到86.7%,采摘耗時平均為15 s·個-1,但尚無法保證對番茄無損采摘,且對番茄種植環境要求高。王曉楠等[86]研發的番茄采摘機器人利用結構光視覺識別定位算法,通過HIS 顏色模型對番茄圖像分割與目標定位,該機器人采摘番茄成功率達83.9%,果實采摘平均耗時24 s·個-1。陳光宇[87]基于機器視覺技術提出流行排序顯著目標檢測算法解決機器人識別綠色青椒困難問題,該方法采用前景特征的顯著性檢測,采集位于圖像邊緣的青椒目標圖像,將前景特征和背景特征融合,獲得最佳性能的顯著性檢測圖像,檢測結果顯示對青椒目標果實識別準確率達到85.6%。
在百合科蔬菜的采摘定位檢測方面,馬聰等[88]基于機器視覺技術搭建了黃花菜采摘機器人視覺系統,采用Bouguet 算法對雙目圖像進行校正,通過HSV 顏色模型完整地分割出黃花菜目標區域,初步試驗結果良好,其采用的方法和算法可以為黃花菜采摘機器人進一步更精準采摘提供借鑒。
在睡蓮科蔬菜的采摘定位檢測方面,武曉坤[89]基于機器視覺技術設計出一款智能機械臂對水生莼菜實施采摘,檢測結果顯示對于葉徑小于80 mm、根莖與菜葉平面夾角大于20°的莼菜采摘效果較佳,采摘時耗平均25.5 s·個-1,采摘成功率可達65.63%。
綜上所述,機器視覺技術在瓜菜果實的采摘定位方面確實有著較為廣闊的應用前景,其采摘效率優于人工采摘作業。只是目前在背景識別精度、無損采摘質量與采摘環境適應性方面還有著一定的不足,隨著機器視覺與機器人技術的越發成熟,未來的瓜菜果實定位采摘機器人一定會突破此類瓶頸的束縛,實現智能化與無損化采摘。
3 機器視覺技術在瓜菜檢測應用中的研究展望
3.1 主要存在的問題
機器視覺技術憑借其檢測智能化及精準度高等特征,已經成為目前瓜菜檢測領域的重要研究方向之一。研究機器視覺技術并讓其服務于瓜菜檢測應用,不僅能夠釋放勞動力資源,還能促進瓜菜產業的高質量發展與安全保障,對增強廣大生產者和消費者的獲得感、安全感與幸福感具有十分重要的意義。盡管機器視覺技術研究取得了一定進展,并在農產品領域有了較為廣泛的應用,但當前在瓜菜檢測應用方面依然存在一些不足,主要體現在以下幾個方面。
3.1.1 難以應對復雜多變的檢測場景環境 機器視覺技術需要適應一定的檢測場景環境才可對瓜菜檢測做出精準識別。通常研究都是基于試驗場景環境下開展檢測,因此人為設置的檢測場景較為理想。瓜菜的實際生長環境較為復雜,大多是自然環境下的開放農田或者設施種植的封閉溫室大棚。自然環境下的農田受多種不確定性因素影響較大,例如風霜雨雪及大風刮起的灰塵等都會影響機器攝取瓜菜圖像的質量。而溫室大棚內存在較大的水汽濕度,溫度上升產生水霧會影響機器抓拍清晰的瓜菜圖像,另外溫室大棚內的酸堿度和濕度也會影響機器的硬件采集設備而縮減機器系統的使用壽命。
3.1.2 圖像數據信號傳輸與處理的速度亟待加快 瓜菜檢測模型多用大型神經網絡搭建,參數多且計算量大,特征空間維度高,通常需要將算法模型放置于云端服務器中,網絡通道一定要穩定順暢,否則難以達到機器視覺系統的實時在線檢測目的。機器“視”系統采集到的瓜菜海量圖像數據信號龐大且冗余繁多,需要多傳感器融合成并行處理單元解決海量圖像數據信號傳輸,并且機器“覺”系統的算法必須計算力超強,否則圖像數據信號處理速度會出現明顯時滯,也難以實現機器視覺系統智能化的高效率檢測目標。
3.1.3 動態檢測結果的準確程度仍需提高 機器視覺技術應用于瓜菜檢測的研究對象一般為處于靜態的瓜菜個體,對其采集靜態的圖像數據信號開展檢測分析。而實際生產中的瓜菜品質分級工作現場,需要采集處于動態的多個瓜菜的連續圖像序列。從檢測靜態瓜菜到動態瓜菜圖像序列采集、特征提取與數據處理,對機器視覺技術檢測結果的準確性提出了極大的考驗。因而試驗狀態下的檢測識別準確率尚不能真實代表實際的檢測工作。目前的研究只重視試驗狀態下機器視覺技術的智能化檢測優勢,過度依賴機器的分析判斷結果,而實際工作中是否影響到了人的自覺能動性的發揮值得探討與商榷。
3.1.4 機器視覺算法模型檢測的通用性有待提升 當前不同的檢測環境與檢測對象通常設計不同的機器視覺算法模型,這些算法模型尚不能做到普適性的檢測需求,且檢測的精準度各有不同。尤其針對一些復雜的種植環境與采摘背景,機器視覺的算法識別模型改進空間較大。例如通過建立瓜菜果實的背景數據庫,讓算法識別模型能夠記憶并區分各種背景特征,輕松識別出背景中的目標物,這必須依賴并提高機器視覺算法模型的通用性。因此研發并采用普適性的機器視覺算法模型尤為必要。
3.2 未來展望
當前機器視覺技術已經滲透到了工農業生產與日常生活中,在很多場景實現了較為豐富的應用。機器視覺技術的廣泛應用提高了工農業的生產力與自動化水平,也改善了人們的日常生活。隨著大數據、云計算、物聯網與人工智能技術的飛速發展,以及機器人、3D 傳感器、計算機處理算法等技術的日益突破,機器視覺技術必將在瓜菜等農產品領域發揮更快速便捷、更智能、更可靠以及更多元的檢測作用。尤其是在機器替代人眼的研究與使用方面,在各種先進的現代化人工智能與信息技術加持下,普適性的機器視覺系統能夠輕松克服各種檢測噪聲的干擾影響。機器視覺算法模型的通用性能夠適應各種自然的檢測場景環境與復雜的檢測背景,其強大的計算力能夠對瓜菜目標數據實施快速毫無時滯地精準處理,真正實現智能化的高效檢測。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48