檢測與機器人傳感器技術課程教學內涵式發展策略探究*
2024-01-03 09:29:30杜一君劉娣喬貴方周磊
中國教育技術裝備 2023年22期
杜一君 劉娣 喬貴方 周磊
南京工程學院 南京 211167
0 引言
2022年政府工作報告提出“推進高等教育內涵式發展,優化高等教育布局”。高等教育內涵式發展是我國向高等教育強國發展的必然選擇,也是人才強國的重要途徑[1]。高等教育內涵式發展的提出表明了我國高等教育發展已經由以數量規模為考量進入以質量為特征的內涵發展新階段,為我國高等教育今后發展道路和發展模式指明了方向[2]。
南京工程學院為深入貫徹黨中央關于教育的重要論述,落實立德樹人根本任務,鼓勵教師積極參與教學研究與改革,推動教學研究和改革成果的交流與推廣[3-6]。在這樣的大背景下,檢測與機器人傳感器技術課程開展了教育內涵式發展策略的實踐探究,以實現高等教育內涵式發展為目標,圍繞推動“教學創新和培養一流人才”的教學理念,推動課堂教學改革,提升創新型與應用型人才培養質量。下面將具體介紹檢測與機器人傳感器技術課程的教學改革措施。
1 實踐對象
南京工程學院自動化學院機器人工程專業本科生,機器人2019 級3 個班,實踐時間為2021 至2022 第1 學年,教學學時為32 學時,其中理論學時占32 學時,實驗學時為0,學分為2 學分。
2 教學改革
檢測與機器人傳感器技術課程是機器人工程專業的核心專業課,面向三年級本科生。課程教學采用線上、線下混合式教學模式,以線下課堂教學為主導,小組討論、線上學習和課后作業相結合的混合式教學,充分利用網絡資源,引導學生利用課程線上資源進行自主學習、復習、練習,把傳統教學和網絡教學有機結合起來。本學期該課程主要在大綱的修訂、網絡資源的完善、學習興趣的培養、學習情況的檢查、課程思政五個方面進行了教學改革。
2.1 修訂檢測與機器人傳感器技術課程大綱
本學期完成檢測與機器人傳感器技術課程大綱修訂工作,使大綱不僅符合OBE理念,同時融入思政教育、勞動教育確保課程育人目標達成,具體可參見南京工程學院自動化學院檢測與機器人傳感器技術課程大綱,表1 為課程大綱部分內容展示。
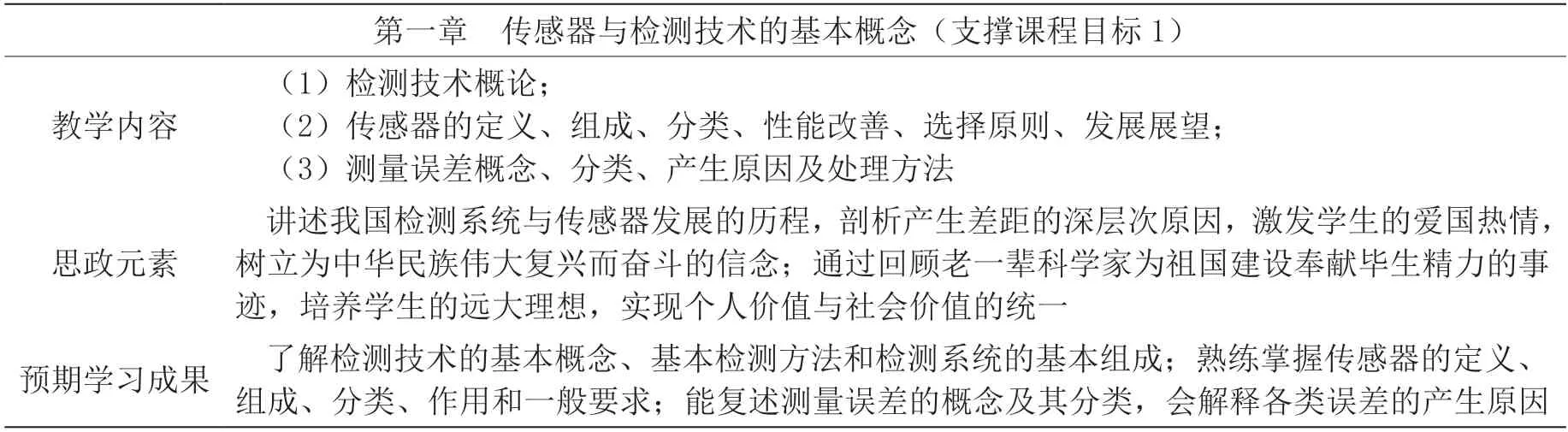
表1 修訂檢測與機器人傳感器技術課程大綱部分內容
2.2 打破忽視網絡學習資源的傳統教學模式問題
以往的教學模式采用PPT+板書,缺少對網絡學習資源的利用,導致學生缺乏自主學習與自我管理能力。
1)本學期完善線上自建課程資源:根據教學內容分配課程組教師錄制教學視頻任務,上傳教學大綱、電子教材、PPT 講義、自主學習材料、練習題、活動話題等資料。圖1 為自建教學視頻截圖。

圖1 檢測與機器人傳感器技術部分自建教學視頻
2)鼓勵學生課下充分利用網上教學資源,如《傳感器與測試技術》(國防科技大學,主講葉湘濱),進行自主學習。
2.3 打破教學中注重知識講授,忽略學生學習興趣和自學能力的培養問題
以往教學注重理論知識的傳授,輕視動手實踐能力,忽略學生學習動機的激發。
1)本學期通過生活中常見的檢測系統,傳感器的應用引入理論知識,通過對實際檢測系統中傳感器工作原理分析,激發學生的學習好奇心。例如,在講解電阻應變式傳感器時,先帶領學生觀看一段由日本AIST 公司生產的高級人形機器人正在搬運的視頻,指出機器人握力傳感器用的就是電阻應變式傳感器,簡要介紹一下它的工作原理,引起學生對本堂教學內容的興趣和求知欲。
2)通過前沿新技術的介紹,激發學生對本領域科學研究的熱情,培養學生以“技”報“國”的社會責任感。向學生介紹機器人大講堂、Cver、新智元等技術類公眾號刊登的科技報道,使學生了解當今技術發展動態,及時更新知識儲備。
3)鼓勵學生對某類機器人進行系統研究,鍛煉學生查閱資料、篩選信息、分析和表述能力。表2 展示的是一次作業布置的內容。
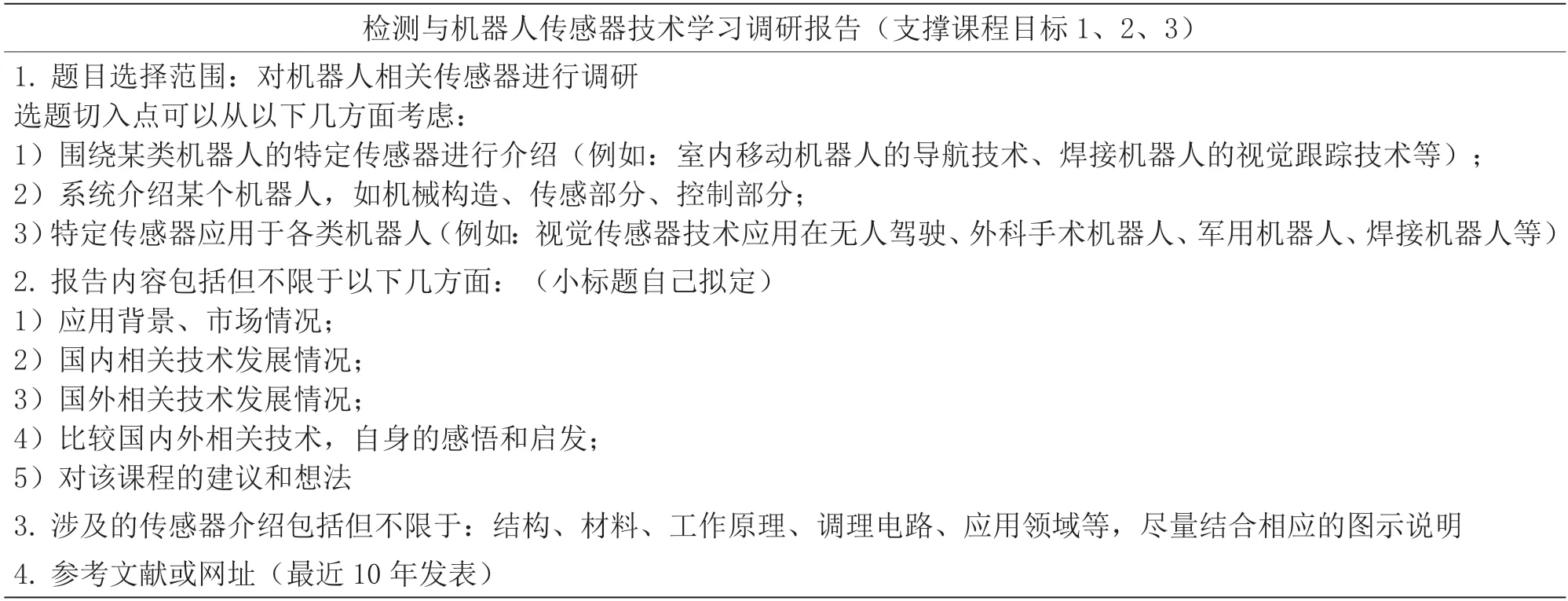
表2 過程考核中作業布置的研究內容
2.4 改變學生學習情況檢查、課堂問題反饋不及時問題
以往作業、習題布置在作業本上,學完一章后統一收齊批改。課下學生學習遇到問題一般都是留到下次上課才能問教師得到解答。這些都造成了問題的堆積,不能及時反饋。
本學期通過學習通相關功能查看每位學生隨堂練習測試情況,討論話題參與情況等,及時督促學生完成相應任務,督促方式采用QQ 群課堂點名形式和每周發布通知形式,提醒大家學習進度。
1)根據學習通作業題正確率統計,及時了解學生知識點掌握情況,上課時有重點和針對性地進行查漏補缺。
2)學生在學習過程中遇到不懂問題,可隨時在QQ 群或者學習通留言提問,教師通過語音或文字進行解答,使學生問題能夠得到及時反饋。
2.5 改變把政治教育寄托在政治課上,忽略專業課程職業道德和價值觀的培養問題
以往的教學設計,教師僅考慮知識和技能的傳授,并未深入挖掘課程背后的思政元素,使學生對職業崗位無認同感,對未來職業規劃迷茫,產生碰到困難就想放棄的逃避心態。
本學期課程教學過程中加入思政元素,拓展課外資源加入科學家故事,機器人傳感器技術發展歷程,搜集詮釋傳感器制造重要性,突出課程學習必要性和彰顯工匠精神的視頻,如《大國工匠》《大國重器》等,提供網絡觀看平臺供學生自主觀看,全方位進行課程思政教育。
3 改革效果與反思
3.1 課程總體成績分析
經過這學期的教學改革,機器人19 級檢測與機器人傳感器技術課程平均分為74.27 分,最高分為95 分,最低分為51 分,優、良、中、及格、不及格各分數段成績分布如圖2所示。從考核結果可以看出,成績分布較合理,各檔次學生均有分布,對學生學習效果的區分度明顯,66.96%的學生處在中等及以上,課程目標總體達成度為0.743。相比較于機器人18 級課程目標總體達成度0.686,教學改革后機器人19 級達成度提高較大。此次授課的一些教學改革措施促進了學生成績的提高,歸結有:1)完善了線上教學資料,按照知識點隨堂布置練習題,督促學生及時掌握所學知識點,及時發現問題,及時查漏補缺;2)加強對重點、難點知識講解,課堂帶領大家一起做練習,并及時講解;3)考核制度進行了改革,增大了過程考核力度,注重學生實踐能力、自主學習能力和創新能力的培養,提高了學生學習熱情和動力。
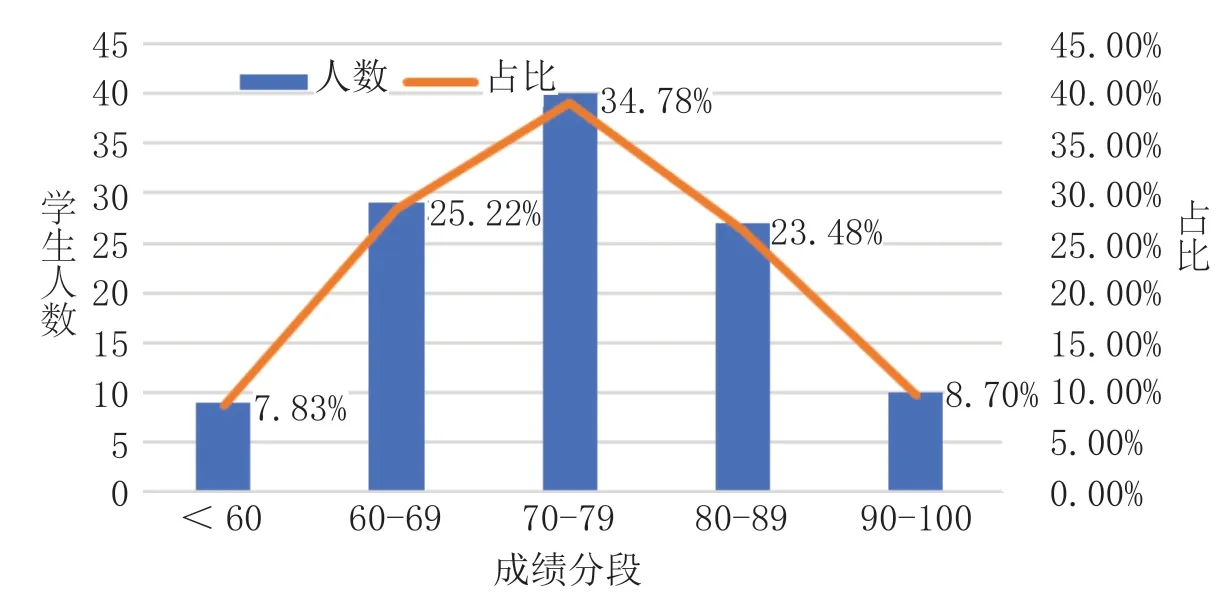
圖2 機器人19 級課程成績分布圖
3.2 課程調查問卷分析
檢測與機器人傳感器技術課程在教學任務完成后,為了總結和了解學生的學習效果,了解通過本課程學習后,學生的知識、能力是否得到提升,課程組設計了課程調查問卷,全卷12 道問題,包括學生對課程目標的了解程度,課程目標是否具有指導作用,考核的了解情況,怎樣的考核方式更能促進課程目標的達成,學習中遇到的問題和解決途徑,是否喜歡挑戰性的課題任務,本課程的重、難點的理解和掌握情況評估,提高工程素養的途徑,教學的建議等方面。該調查問卷旨在了解和把握該課程的課堂教學實施現狀,為進一步深化課程教育教學改革,全面提升課程質量提供數據支撐。該調查問卷發放115 份,收回105 份,并對每個問題的回答情況進行了匯總分析。
圖3 為調查報告第7 題關于學生對課程目標1達成情況的自我認識調查,圖4 為學生的最終成績對課程目標1 達程情況的真實反映。課程目標1 要求學生掌握檢測技術的基本知識,檢測系統的基本結構、功能和設計方法,誤差理論,培養學生能夠運用相關專業原理,建立系統模型,分析和解決復雜工程問題的能力。
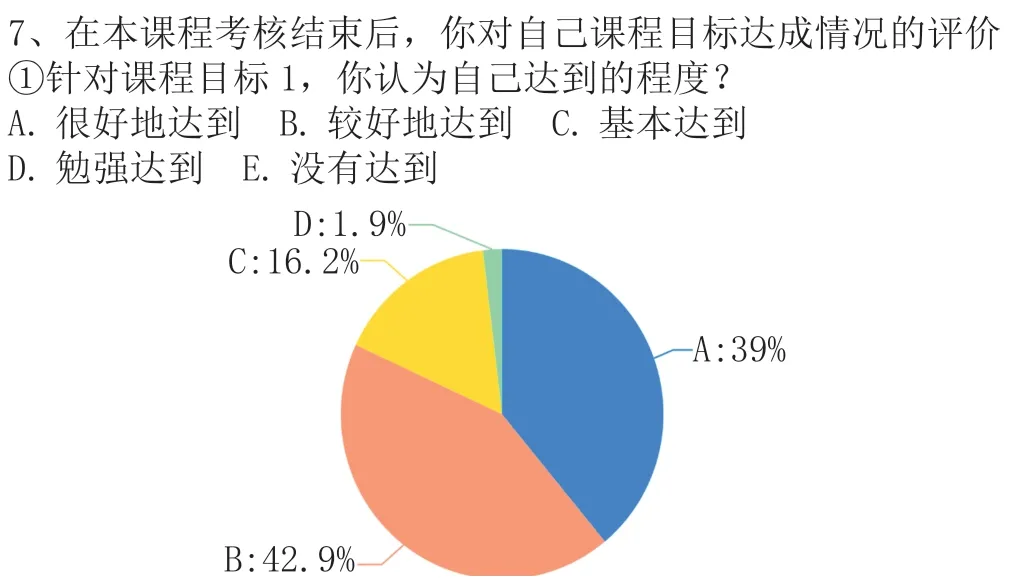
圖3 關于調查報告第7 題的調查情況截圖
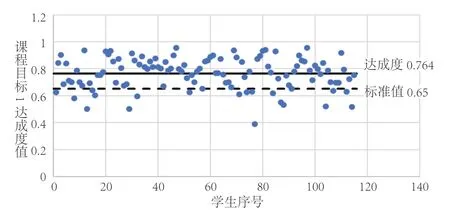
圖4 機器人19 級學生課程目標1 達成情況分布圖
問卷統計結果有81.9%的學生認為對課程目標1 能夠較好達到,有16.2%的學生認為能夠基本達到課程目標1,有1.9%的學生認為勉強達到課程目標1。從實際考核結果來看,19 級年級課程目標1 的達成度為76.4%,學生對自己學習情況的認知基本清楚,通過分布圖4 發現有少部分學生課程目標1 的能力沒有達成,分析原因如下:這部分知識點比較多,概念抽象容易混淆,學生對檢測系統的分析和設計能力還需要加強培養,多練習有助于理解。
3.3 采取的改進措施
通過對考核結果和問卷調查的分析,我們在今后的教學工作中可以采取以下改進措施。
1)本課程將繼續采用線上、線下混合式教學,運用討論式、探究式、任務驅動式和案例式等多元化教學方法,提高教學效果,激發學生學習興趣。
2)為了加強學生對機器人傳感器的直觀認識,增加帶領學生參觀自動化學院機器人創新實驗室環節,對學院引進的機器人設備進行簡要介紹,讓學生進行實際操作,培養學生動手能力和理論聯系實際的能力。
3)加強培養學生表述、搜索資料、提煉、總結、制作PPT 和撰寫報告能力,按照機器人的不同應用場景(如:工業、農業、醫療、軍用、服務、仿生機器人等)分小組就所選擇課題進行討論、匯報。
4)鼓勵學生積極參加科創項目研究,讓學生真正達到“做中學”,以此培養學生以“技”報“國”的社會責任感和良好的職業道德。
4 結束語
教育是國之大計,黨之大計。本次檢測與機器人傳感器技術課程的教學改革以實現高等教育內涵式發展為目標。通過本課程學習,使學生能夠構建完整的監測技術和工業機器人傳感器技術知識體系。本次教學改革注重知識的建構性、學習者的主導性與學習的互動性,引導學生創造性地運用知識,自主發現問題、研究問題和解決問題,培養學生社會責任感和愛國主義情懷,為畢業后從事相關工程技術工作和科學研究奠定必要的技術基礎和職業素養。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
內蒙古教育(2021年20期)2021-03-08 01:09:14
甘肅教育(2020年14期)2020-09-11 07:57:50
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
海峽科技與產業(2016年3期)2016-05-17 04:32:12