基于LabVIEW的農(nóng)業(yè)采摘機(jī)器人虛擬運(yùn)動(dòng)仿真研究
2024-01-09 02:24:14張倩,李楊
農(nóng)機(jī)化研究 2024年1期
張 倩,李 楊
(1.石家莊工程職業(yè)學(xué)院,石家莊 050000;2. 石家莊科技信息職業(yè)學(xué)院,石家莊 050024)
0 引言
隨著先進(jìn)種植技術(shù)的不斷發(fā)展,設(shè)施農(nóng)業(yè)生產(chǎn)過程的各個(gè)環(huán)節(jié)對勞動(dòng)力的需求也不斷增長,而水果蔬菜的收獲過程仍依靠大量的手工作業(yè)完成,造成果蔬收獲成本無法有效降低[1-2]。隨著城市化進(jìn)程的加快,農(nóng)村勞動(dòng)力缺口越來越大。因此,研究開發(fā)一種水果蔬菜收獲采摘型農(nóng)業(yè)機(jī)器人,能夠有效促進(jìn)先進(jìn)種植的發(fā)展,并從中解放出大量的勞動(dòng)力。采摘機(jī)器人具有較高的精確度,且效率高,可以保證果蔬采摘過程順利進(jìn)行,能有效降低農(nóng)業(yè)種植生產(chǎn)成本[3-5]。果蔬采摘機(jī)器人作業(yè)速度和作業(yè)精度直接影響使用過程中的成本,采摘機(jī)器人生產(chǎn)成本直接決定了采摘機(jī)器人的推廣使用過程。因此,對農(nóng)業(yè)采摘機(jī)器人進(jìn)行虛擬運(yùn)動(dòng)仿真,能在設(shè)計(jì)階段對采摘機(jī)器人的作業(yè)速度和運(yùn)動(dòng)軌跡進(jìn)行驗(yàn)證,從而有效降低生產(chǎn)成本,提高農(nóng)業(yè)采摘機(jī)器人使用過程中的生產(chǎn)效率[6-7]。
筆者通過對六自由度農(nóng)業(yè)采摘機(jī)器人的正運(yùn)動(dòng)學(xué)和逆運(yùn)動(dòng)學(xué)過程進(jìn)行分析,結(jié)合SolidWorks中的Motion模塊對采摘機(jī)器人的運(yùn)動(dòng)軌跡進(jìn)行規(guī)劃,并采用LabVIEW對農(nóng)業(yè)采摘機(jī)器人的運(yùn)動(dòng)學(xué)過程進(jìn)行虛擬仿真。
1 采摘機(jī)器人總體結(jié)構(gòu)
所設(shè)計(jì)的采摘機(jī)器人是一種六自由度農(nóng)業(yè)采摘機(jī)器人,主要包含機(jī)器人移動(dòng)本體、腰部回轉(zhuǎn)機(jī)構(gòu)、大臂、小臂、腕部及采摘執(zhí)行器[8],如圖1所示。
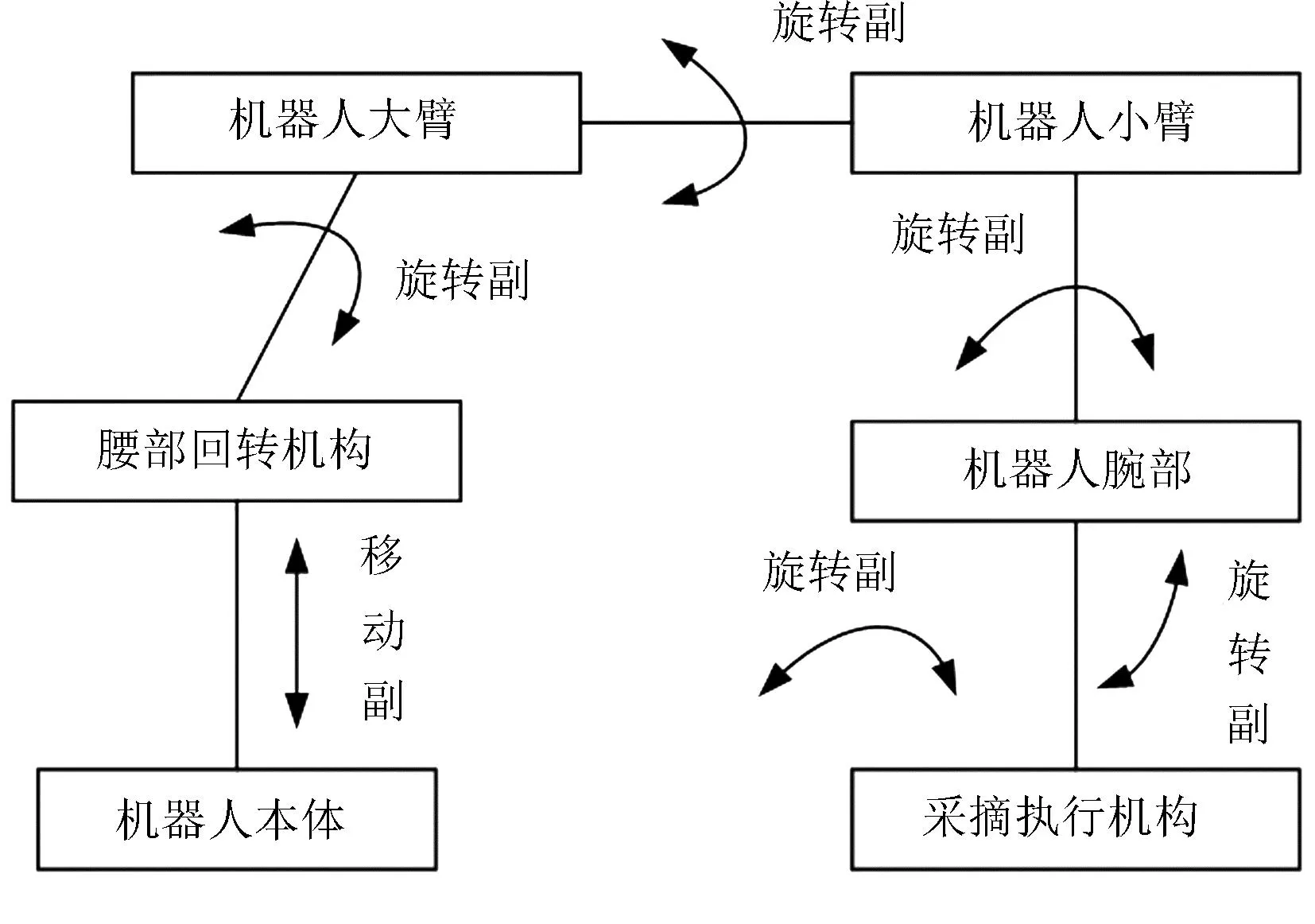
圖1 農(nóng)業(yè)采摘機(jī)器人結(jié)構(gòu)示意圖Fig.1 Structure diagram of agricultural picking robot
采摘機(jī)器人臂部包含1個(gè)移動(dòng)副和3個(gè)旋轉(zhuǎn)副,機(jī)器人腕部包含俯仰和回轉(zhuǎn)2個(gè)自由度,形成采摘機(jī)器人的六自由度運(yùn)動(dòng)副,且每一個(gè)運(yùn)動(dòng)副位置均安裝有零位開關(guān)和正負(fù)兩個(gè)方向的限位開關(guān)[9]。采摘機(jī)器人肩關(guān)節(jié)和肘關(guān)節(jié)位置采用諧波減速器,各轉(zhuǎn)動(dòng)軸在旋轉(zhuǎn)過程中采用編碼器進(jìn)行電機(jī)位置反饋,形成采摘機(jī)器人作業(yè)過程中的閉環(huán)控制[10]。表1所示為農(nóng)業(yè)采摘機(jī)器人D-H參數(shù)表。
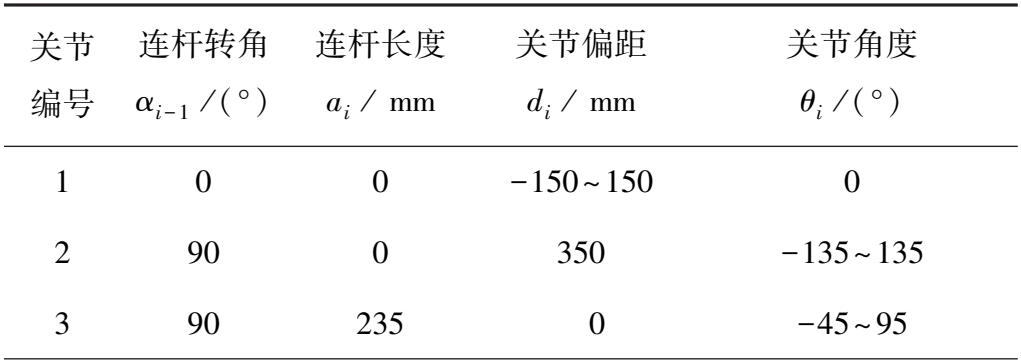
表1 農(nóng)業(yè)采摘機(jī)器人D-H參數(shù)表Table 1 D-H parameter table of agricultural picking robot
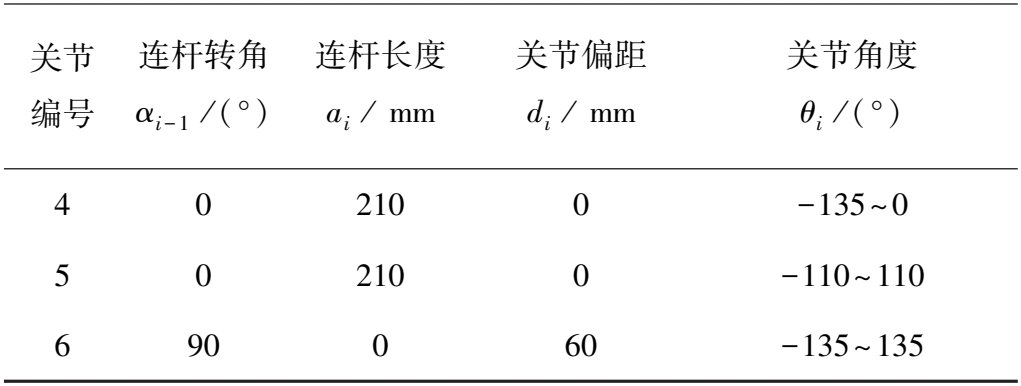
續(xù)表1
2 采摘機(jī)器人運(yùn)動(dòng)學(xué)分析
機(jī)器人各關(guān)節(jié)坐標(biāo)之間的齊次變換矩陣為
其中,s2=sinθ2,c2=cosθ2,s34=sin(θ3+θ4),c34=cos(θ3+θ4),s345=sin(θ3+θ4+θ5),c345=cos(θ3+θ4+θ5)。
由此可以得出采摘機(jī)器人正運(yùn)動(dòng)學(xué)方程為
其中,nx、ny、nz,ox、oy、oz、ax、ay、az表示采摘機(jī)器人采摘機(jī)構(gòu)的姿態(tài)信息;px、py、pz表示采摘機(jī)器人采摘機(jī)構(gòu)的位置信息。
采摘機(jī)器人逆運(yùn)動(dòng)學(xué)求解是在確定好機(jī)器人采摘機(jī)構(gòu)作業(yè)位置信息與姿態(tài)信息的條件下,求解各關(guān)節(jié)的變量,用來進(jìn)行關(guān)節(jié)運(yùn)動(dòng)控制,從而實(shí)現(xiàn)采摘機(jī)器人作業(yè)過程的精準(zhǔn)運(yùn)動(dòng)控制[11]。
采摘機(jī)器人逆解的數(shù)學(xué)表達(dá)式可理解為非線性方程組的求解,該逆解沒有通用的求解方法[12]。因此,在求解過程中,使用代數(shù)迭代和幾何求解相互結(jié)合的方式進(jìn)行采摘機(jī)器人逆運(yùn)動(dòng)學(xué)求解,由此可以得出采摘機(jī)器人逆解表達(dá)式,即
θ4=
θ5=arccosay-θ3-θ4
3 采摘機(jī)器人虛擬運(yùn)動(dòng)仿真
機(jī)器人采摘機(jī)構(gòu)軌跡規(guī)劃算法包含直線軌跡規(guī)劃和圓弧軌跡規(guī)劃,在此利用SolidWorks實(shí)現(xiàn)采摘機(jī)器人執(zhí)行機(jī)構(gòu)的虛擬運(yùn)動(dòng)仿真[13-14]。圖2所示為直線軌跡規(guī)劃示意圖;圖3所示為圓弧軌跡規(guī)劃示意圖。虛擬仿真過程中,調(diào)用SolidWorks Motion模塊,利用兩種不同的方式獲取采摘機(jī)構(gòu)運(yùn)行軌跡參數(shù)插補(bǔ)數(shù)據(jù)。
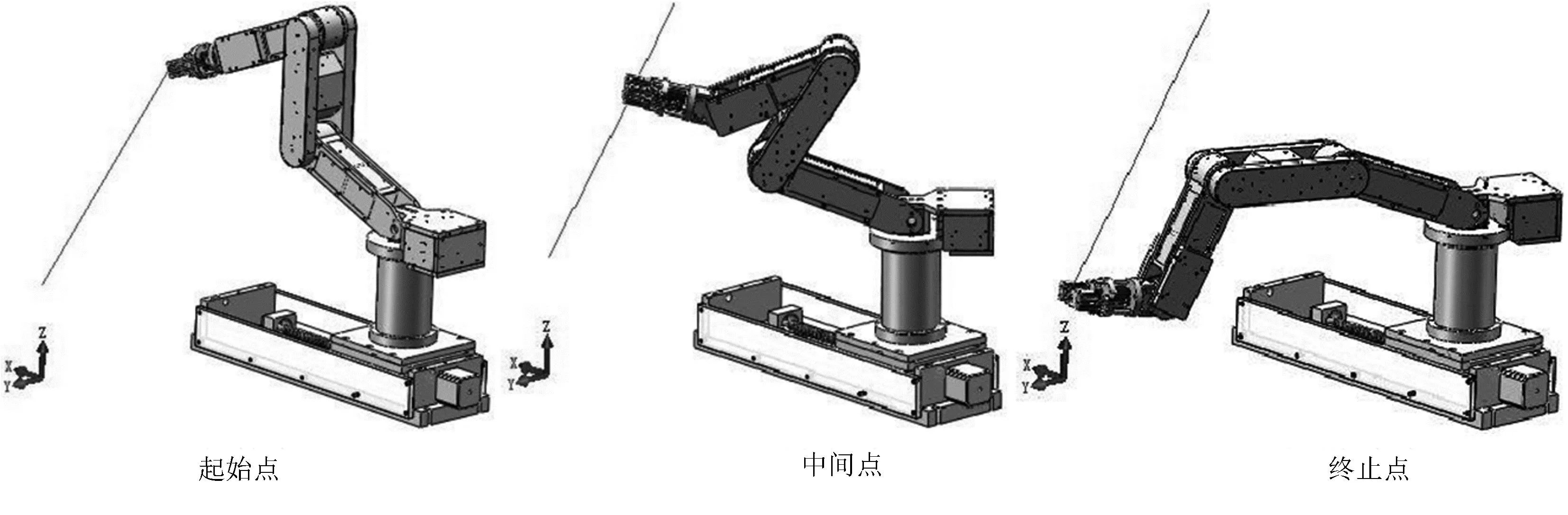
圖2 直線軌跡規(guī)劃示意圖Fig.2 Schematic diagram of linear trajectory planning
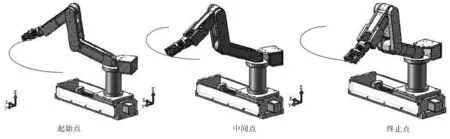
圖3 圓弧軌跡規(guī)劃示意圖Fig.3 Schematic diagram of arc trajectory planning
4 聯(lián)合仿真試驗(yàn)分析
采摘機(jī)器人在作業(yè)過程中,多個(gè)關(guān)節(jié)變量之間相互耦合,需對其進(jìn)行協(xié)調(diào)控制。因此,使用LabVIEW中的控制向量對多關(guān)節(jié)進(jìn)行協(xié)調(diào)控制。控制過程中,將不同的關(guān)節(jié)驅(qū)動(dòng)變量配置為獨(dú)立的向量,控制命令直接對獨(dú)立的關(guān)節(jié)電機(jī)進(jìn)行驅(qū)動(dòng),采摘機(jī)器人采摘機(jī)構(gòu)按照設(shè)定的軌跡進(jìn)行運(yùn)動(dòng)[15]。圖4所示為采摘機(jī)器人運(yùn)動(dòng)仿真程序框圖。仿真試驗(yàn)過程中,LabVIEW與SolidWorks之間利用通訊接口進(jìn)行數(shù)據(jù)交互,實(shí)現(xiàn)采摘機(jī)器人的虛擬運(yùn)動(dòng)仿真。圖5所示為采摘機(jī)器人執(zhí)行機(jī)構(gòu)運(yùn)行軌跡曲線。

圖4 采摘機(jī)器人虛擬仿真程序框圖Fig.4 Virtual simulation program block diagram of picking robot

圖5 采摘執(zhí)行機(jī)構(gòu)運(yùn)行軌跡曲線Fig.5 Running track curve of picking actuator
5 結(jié)論
利用LabVIEW與SolidWorks進(jìn)行采摘機(jī)器人運(yùn)動(dòng)學(xué)聯(lián)合仿真,能夠有效地對機(jī)器人的半物理模型樣機(jī)系統(tǒng)開發(fā)進(jìn)行控制,提高采摘機(jī)器人設(shè)計(jì)和使用過程效率,為采摘機(jī)器人的精準(zhǔn)化和高效率作業(yè)提供依據(jù)。
猜你喜歡
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30

- 農(nóng)機(jī)化研究的其它文章
- 報(bào)廢更新補(bǔ)貼政策視角下農(nóng)業(yè)機(jī)械化轉(zhuǎn)型研究
- 基于ADAMS的植保機(jī)操縱穩(wěn)定性分析與研究
- 基于離散元的顆粒肥料與PVC板之間的仿真參數(shù)的標(biāo)定
- 面向?qū)ο蠹夹g(shù)的智能插秧機(jī)控制系統(tǒng)設(shè)計(jì)研究
- 雙電機(jī)拖拉機(jī)動(dòng)力系統(tǒng)參數(shù)匹配及優(yōu)化設(shè)計(jì)
- 農(nóng)業(yè)運(yùn)輸車自動(dòng)導(dǎo)航系統(tǒng)的設(shè)計(jì)及試驗(yàn)研究