類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化
2024-03-05 08:29:50李雅軒劉新福
導(dǎo)彈與航天運載技術(shù) 2024年1期
魯 鵬,李雅軒,劉新福
(北京理工大學(xué)宇航學(xué)院,北京,100081)
0 引 言
航天運輸系統(tǒng)是開展空間活動的核心支撐,是發(fā)展航天事業(yè)、建設(shè)航天強國的基本前提,是加速發(fā)展空間科學(xué)技術(shù)、和平開發(fā)空間資源和維護國家空間安全的重要保障[1]。近年來,隨著人類空間資源開發(fā)需求的快速增長,可重復(fù)使用運載器受到了全球的廣泛關(guān)注,世界各主要航天大國積極開展了相關(guān)的理論研究和工程實踐[2]。
瞄準星際移民和深空探測的目標,美國太空探索技術(shù)公司(SpaceX)研制了名為星艦(Starship)的新一代可重復(fù)使用航天運輸系統(tǒng)。2016 年9 月,SpaceX 公司正式對外公布了“星際運輸系統(tǒng)”方案[3]。此后,星艦設(shè)計方案經(jīng)歷了多次重大改進和演化。自2020 年起,通過開展密集的飛行測試,SpaceX 公司逐步掌握了150 m 低空懸停、10 km 高空飛行、翻轉(zhuǎn)機動和垂直定點軟著陸等關(guān)鍵技術(shù),項目取得重大進展。值得關(guān)注的是,星艦采取了與傳統(tǒng)航天器截然不同的著陸方式:著陸前,星艦采用90°左右大攻角飛行,在視覺上以腹部平拍的姿態(tài)向地面飛行;接近地面時,星艦發(fā)動機開機進行推力矢量控制,聯(lián)合首尾四個氣動舵,完成姿態(tài)由水平向垂直的快速翻轉(zhuǎn),并控制星艦減速和修正位置誤差,實現(xiàn)定點軟著陸[4]。圖1展示了該特殊的著陸過程。這種獨特的著陸方式對飛行器的軌跡優(yōu)化設(shè)計提出了新的挑戰(zhàn)。大范圍的姿態(tài)機動和復(fù)雜的約束條件必須在優(yōu)化設(shè)計翻轉(zhuǎn)著陸飛行軌跡時得到充分的考慮。

圖1 類星艦飛行器翻轉(zhuǎn)著陸過程示意Fig.1 The flipping and landing process of a starship-like vehicle
近年來,凸優(yōu)化方法被廣泛地應(yīng)用于飛行器軌跡優(yōu)化設(shè)計,特別是在解決星際探測器、運載火箭等常規(guī)航天器的著陸軌跡優(yōu)化問題時發(fā)揮積極作用[5]。美國噴氣推進實驗室的A??kme?e 等[6]通過使用無損松弛和變量替換等方法將帶有非凸推力約束的火星著陸軌跡優(yōu)化問題轉(zhuǎn)化為凸優(yōu)化問題,顯著提高了軌跡優(yōu)化算法的可靠性和計算效率。Szmuk等[7]對六自由度火星動力下降制導(dǎo)問題進行了深入研究,通過設(shè)計序列凸優(yōu)化算法計算考慮姿態(tài)動力學(xué)的著陸飛行軌跡。相比于火星著陸,因為氣動力不可忽略,運載火箭著陸在地球表面的軌跡優(yōu)化問題求解難度更大。劉新福[8]將推力和攻角同時作為控制量,把對應(yīng)的燃料最優(yōu)著陸問題順利轉(zhuǎn)化為凸優(yōu)化問題進行迭代求解,并理論證明了所采用松弛技術(shù)的有效性。楊潤秋等[9]將該研究工作拓展到飛行時間自由的問題,用高度代替時間作為自變量對優(yōu)化問題進行重構(gòu),并基于序列凸優(yōu)化設(shè)計了軌跡優(yōu)化算法,其中使用的非線性保留技術(shù)被證實可以有效提升算法收斂性。
盡管上述方法能夠有效解決常規(guī)航天器的著陸軌跡優(yōu)化問題,但對類星艦飛行器的翻轉(zhuǎn)著陸軌跡優(yōu)化并不太適用。原因在于類星艦飛行器在滑翔段和著陸段之間存在獨特的翻轉(zhuǎn)過程。大范圍的姿態(tài)機動導(dǎo)致類星艦飛行器不能被簡單地處理為質(zhì)點模型,而必須在設(shè)計著陸軌跡時考慮姿態(tài)動力學(xué)和因姿態(tài)控制產(chǎn)生的復(fù)雜約束條件。但是,目前針對此類軌跡優(yōu)化問題的研究非常有限。
本文針對類星艦飛行器的翻轉(zhuǎn)著陸軌跡優(yōu)化問題進行了深入研究。首先根據(jù)類星艦飛行器在翻轉(zhuǎn)著陸階段的飛行力學(xué)特征和任務(wù)特點,建立考慮姿態(tài)機動和典型約束條件的翻轉(zhuǎn)著陸軌跡優(yōu)化問題。然后研究將該優(yōu)化問題通過凸化方法轉(zhuǎn)化為凸優(yōu)化問題,進而設(shè)計迭代算法序列求解。通過提供合理的初值、引入虛擬控制和在目標函數(shù)中懲罰信賴域半徑等方法,該迭代算法表現(xiàn)出良好的收斂性。針對發(fā)動機擺角振蕩問題,本文提出將發(fā)動機擺角響應(yīng)引入動力學(xué),這種處理被證實能夠有效抑制發(fā)動機擺角振蕩,并有利于迭代算法的收斂。此外,依托軌跡優(yōu)化算法,本文亦分析了發(fā)動機個數(shù)和優(yōu)化目標選取等因素對類星艦飛行器翻轉(zhuǎn)著陸過程的影響,相關(guān)數(shù)值結(jié)果可以為類星艦飛行器的翻轉(zhuǎn)著陸軌跡優(yōu)化設(shè)計提供參考。
1 翻轉(zhuǎn)著陸軌跡優(yōu)化問題
1.1 動力學(xué)建模
本文將研究類星艦飛行器在二維平面內(nèi)考慮一個姿態(tài)角的翻轉(zhuǎn)著陸軌跡優(yōu)化問題。再入過程中飛行器控制能力強,通常可使飛行器再入終端速度矢量和著陸點位于同一垂直平面內(nèi),而著陸過程中的側(cè)向運動通常會消耗額外燃料,因此在進行類星艦飛行器軌跡優(yōu)化時可以忽略側(cè)向運動。實際飛行時,著陸過程中的側(cè)向位置誤差可以通過控制進行修正。構(gòu)造類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化問題時會使用到著陸坐標系Oxy和體坐標系Obxbyb,如圖2所示。
圖2 著陸坐標系Oxy和體坐標系Obxb ybFig.2 The definition of landing coordinate system Oxy and the body-fixed coordinate system Obxb yb.
圖3a 展示了飛行器翻轉(zhuǎn)著陸過程受力分析結(jié)果,根據(jù)牛頓第二定律建立動力學(xué)方程。為了避免在問題求解時出現(xiàn)數(shù)值問題,需要對動力學(xué)方程中的物理量進行無量綱化處理。長度的無量綱系數(shù)為飛行器初始高度ry0,速度無量綱系數(shù)為ry0g0(g0是地球表面重力加速度),時間無量綱系數(shù)為ry0g0,質(zhì)量無量綱系數(shù)為初始質(zhì)量m0。著陸坐標系下,無量綱的飛行器翻轉(zhuǎn)著陸的動力學(xué)方程,記為x?(t) =f(x(t),u(t)),如下:
圖3 飛行器受力分析和結(jié)構(gòu)參數(shù)Fig.3 Force analysis and structural parameters of the vehicle
式中r∈R3為飛行器位置矢量;v∈R3為飛行器速度矢量;m為飛行器質(zhì)量;T為發(fā)動機推力矢量;T為推力矢量的模,T=‖T‖;D為氣動阻力矢量;g為重力加速度矢量;θ為飛行器俯仰角(定義見圖2);ω為俯仰角速度;MT為推力產(chǎn)生的力矩;MD為阻力力矩;Jz為飛行器繞質(zhì)心的轉(zhuǎn)動慣量;αe為質(zhì)量消耗率,αe=-1Isp,Isp為發(fā)動機比沖;δ為發(fā)動機擺角;δd為δ的響應(yīng);Td為一階慣性環(huán)節(jié)的無量綱時間常數(shù)。本文將發(fā)動機擺角視為控制變量,它同時控制位置和姿態(tài),進行軌跡優(yōu)化時會導(dǎo)致嚴重的發(fā)動機擺角振蕩。鑒于此,本文將發(fā)動機擺角響應(yīng)引入動力學(xué)(見式(6))。數(shù)值仿真結(jié)果表明,這一思路將有效抑制發(fā)動機擺角振蕩現(xiàn)象,進而提高了2.3 節(jié)設(shè)計的軌跡優(yōu)化算法的收斂性。x為狀態(tài)變量,x=[rTvTθ ω m δd]T,u為控制變量,u=[T δ]T。本文將動力學(xué)投影在著陸坐標系中,因此無量綱的推力T、阻力D以及相應(yīng)推力力矩MT和阻力力矩MD的計算公式如下:
1.2 其它約束條件
飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化不僅受到動力學(xué)方程的約束,還有端點約束和過程約束,接下來詳細介紹這些約束。
飛行器初始狀態(tài)約束可以表述成Φ= 0 的形式。本優(yōu)化問題給定初始位置r(1)0、速度v(1)0、俯仰角θ(1)0、俯仰角速度ω(1)0和初始質(zhì)量m(1)0,本文使用上標“(1)”標記翻轉(zhuǎn)段對應(yīng)的量,使用上標“(2)”標記著陸段對應(yīng)的量。因此Φ具體表達式如下:
翻轉(zhuǎn)著陸過程中飛行器不能有向上的速度,即豎直速度vy不能為正,因此得到速度約束:
為了保證翻轉(zhuǎn)過程中飛行器姿態(tài)在合理范圍,保證著陸過程飛行器垂直著陸,翻轉(zhuǎn)著陸過程施加如下關(guān)于俯仰角的邊界約束:
考慮到飛行器在載人時的舒適性和姿態(tài)控制系統(tǒng)的能力,姿態(tài)角速度不能超過最大值ωmax,即有:
發(fā)動機的最大擺角記為δmax,故擺角需要滿足:
發(fā)動機擺角速度不能超過最大值δ?max,可以通過約束發(fā)動機擺角響應(yīng)的變化率δ?d實現(xiàn)對發(fā)動機擺角速度的限制,由式(6)可知,需引入如下限制發(fā)動機擺角速度的約束:
式中n為發(fā)動機個數(shù),n∈N+。
為了方便垂直著陸,每個時刻飛行器和著陸點連線與豎直方向的夾角不能大于給定角度γgs,這就需要添加下滑道約束:
式中ry為位置矢量在著陸坐標系y軸方向的分量。該下滑道約束是一個二階錐約束。
過程約束(12)~(18)可以改寫為如下不等式約束:
末端等式約束可以表示為E=0 的形式,本優(yōu)化問題中飛行器將著陸到給定位置r(2)f,與此同時末端速度到達給定值v(2)f、俯仰角到達θ(2)f并且俯仰角速度到達ω(2)f。因此,E具有如下形式:
由于燃料有限,終端質(zhì)量需要滿足m(2)(t(2)f)≥mdry,mdry為燃料耗盡時飛行器的質(zhì)量。
飛行器在翻轉(zhuǎn)段和著陸段交接點處的飛行狀態(tài)應(yīng)當連續(xù),連接約束可以表示為Ψ=0,其中:
翻轉(zhuǎn)段耗時、著陸段耗時和翻轉(zhuǎn)著陸段總飛行時間滿足約束:
式中tmin為總飛行時間下界;tmax為總飛行時間上界。
1.3 翻轉(zhuǎn)著陸軌跡優(yōu)化問題
在優(yōu)化類星艦飛行器翻轉(zhuǎn)著陸的軌跡時,為節(jié)約燃料,同時保證翻轉(zhuǎn)結(jié)束時飛行器高度不能太低,設(shè)計了如下目標函數(shù):
式中μ為懲罰系數(shù),調(diào)節(jié)μ可以改變翻轉(zhuǎn)段結(jié)束時飛行器的離地高度。當μ= 0 時,該優(yōu)化目標將轉(zhuǎn)化為翻轉(zhuǎn)著陸過程燃料最優(yōu)。本文3.4 節(jié)將詳細探討該懲罰系數(shù)的取值對翻轉(zhuǎn)著陸軌跡的影響。
綜上所述,可以構(gòu)造翻轉(zhuǎn)著陸軌跡優(yōu)化問題P0:
問題P0的本質(zhì)是多階段飛行時間自由的最優(yōu)控制問題。因為動力學(xué)約束非線性很強,P0 求解難度較大。
2 凸優(yōu)化求解
本節(jié)將介紹使用改進的序列凸優(yōu)化(Sequential Convex Programming,SCP)算法求解飛行時間自由的類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化問題的方法。雖然序列凸優(yōu)化算法無法保證收斂,但是可以使用一些方法提高其收斂性。為了提高收斂性,求解問題P0時引入虛擬控制,懲罰信賴域半徑[10],并給出了初值選取方法。為了公式的簡潔性,本節(jié)不再添加區(qū)分翻轉(zhuǎn)段和著陸段的上標“(i)”。
為了將飛行時間自由的最優(yōu)控制問題P0轉(zhuǎn)化為等價的飛行時間固定的最優(yōu)控制問題,引入變量τ=(t-t0)/Δt,其中Δt=tf-t0表示該階段耗時,t0是該階段的初始時間,tf是該階段的終端時間。將動力學(xué)方程轉(zhuǎn)換為以τ∈[0,1]為自變量的形式:
式中 上標“'”表示變量對τ求導(dǎo)。狀態(tài)變量和控制變量是t的函數(shù),同樣也是τ的函數(shù),故有:
當以τ作為自變量時,初始狀態(tài)約束是τ= 0時的狀態(tài)約束,終端狀態(tài)約束是τ= 1時的狀態(tài)約束。
2.1 線性化
線性化可以將上述非線性動力學(xué)方程(25)轉(zhuǎn)化為線性動力學(xué)方程。將方程(25)在上一次迭代得到的解附近泰勒展開并保留常數(shù)項和一階項,用展開后的線性方程近似原本的非線性動力學(xué)方程。這里將上一次迭代得到的解記為z[k](τ) ?[(x[k])T(u[k])T]T,時間記為Δt[k],那么在z[k](τ)和Δt[k]附近線性化方程(25),可以得到如下線性動力學(xué)方程:
為了構(gòu)造凸優(yōu)化問題,除了動力學(xué)方程外其它非凸約束也需要進行線性化處理,例如:假設(shè)sn(z)是關(guān)于z的非凸函數(shù),則如下約束是非凸約束:
使用一階泰勒展開,略去高階項,sn(z(τ))≤0 可以由如下線性不等式約束近似:
而問題P0 中除了動力學(xué)約束外沒有其它非凸約束。
2.2 離 散
為了將連續(xù)時間最優(yōu)控制問題轉(zhuǎn)化為非線性規(guī)劃問題,需要對連續(xù)時間最優(yōu)控制問題進行離散。將τ所在的區(qū)間[0,1]離散成N份,0 =τ0<τ1< …<τN=1,式中τ0,τ1,…,τN是離散節(jié)點,與自變量對應(yīng)的狀態(tài) 離 散 點 記 為x0,x1,…,xN,控 制 離 散 點 記 為u0,u1,…,uN。離散動力學(xué)的數(shù)值方法有很多[11],包括歐拉法、梯形法、零階保持器和一階保持器等,本文使用梯形法。線性化后的動力學(xué)方程(26)經(jīng)梯形法離散得到線性等式:
式中hj=τj+1-τj。
動力學(xué)以外的其它約束,例如sn(z(τ)) ≤0,離散形式是每個離散節(jié)點上都滿足相應(yīng)約束:
2.3 虛擬控制和懲罰信賴域
非線性動力學(xué)和其它非線性約束經(jīng)過線性化后,可能使原本可行的問題變成不可行的問題。為了解決由線性化導(dǎo)致的問題不可行,在動力學(xué)方程(29)上添加虛擬控制。離散的動力學(xué)方程(29)添加虛擬控制vc(τ) ∈R8后 得 到 等 式 約 束(31), 記 為
式中vcj=vc(τj),虛擬控制vcj可以保證任意下一個節(jié)點處的狀態(tài)xj+1都是可以達到的。需要注意,如果序列凸優(yōu)化算法收斂時虛擬控制的值不為零,則得到的結(jié)果就不滿足線性化前的動力學(xué)約束。為了使程序收斂時虛擬控制為零,需要在目標函數(shù)中增加關(guān)于虛擬控制的懲罰項Jvc,并且需要為虛擬控制設(shè)置一個較大的懲罰系數(shù)λvc,本文使用的Jvc如下:
為了保證線性化的合理性,需要添加信賴域約束。本文使用可變信賴域,信賴域作為懲罰項放在目標函數(shù)中,即在目標函數(shù)中添加關(guān)于信賴域的懲罰項Jtr:
式中λtr為懲罰系數(shù)。這種以添加懲罰項的方式處理信賴域半徑的方法通常可以使問題收斂得更快。λtr取值一般較小,因為當該值較大時,前后兩次迭代的結(jié)果相差較小,會導(dǎo)致序列凸優(yōu)算法收斂速度變慢,并且很容易收斂到初值附近的可行解。
至此,可以得到時間自由的兩階段軌跡優(yōu)化問題P0被凸化后的優(yōu)化問題P1。本文在翻轉(zhuǎn)段將τ離散為N1等份,在著陸段將τ離散為N2等份。
序列求解凸優(yōu)化問題P1,當Jvc< ?vc并且Jtr
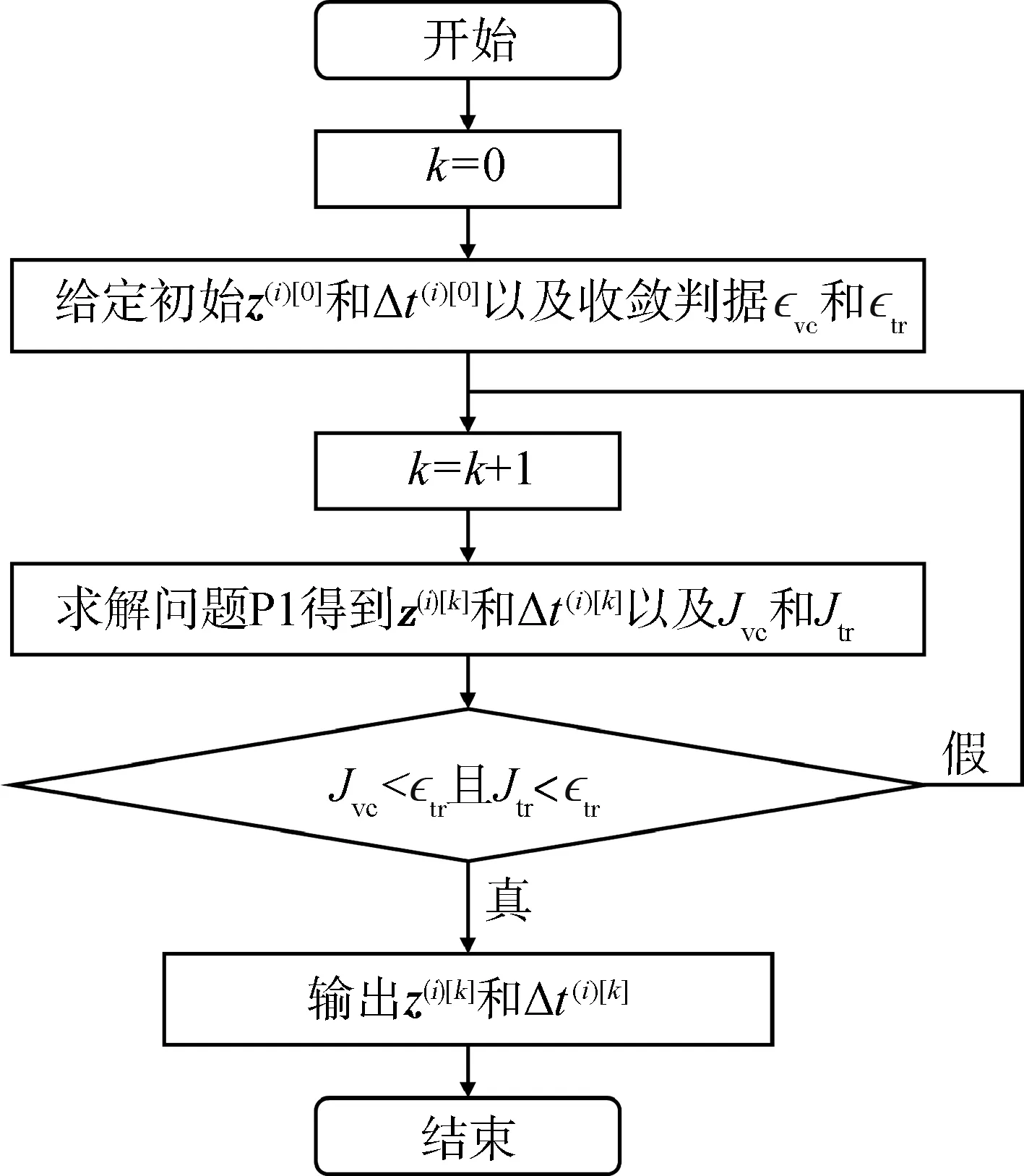
圖4 軌跡優(yōu)化算法流程Fig.4 Flow chart of trajectory optimization algorithm
2.4 初值選取
對于動力學(xué)和其它約束較為簡單的優(yōu)化問題,在使用序列凸優(yōu)化算法求解時,通常可以直接使用線性初值。而對于本文構(gòu)造的動力學(xué)非線性很強的優(yōu)化問題,由于線性初值表現(xiàn)不佳,很容易造成算法1收斂慢或無法收斂的情況。為了提高算法1的收斂性,在這里給出一種選取更好初值的方法。
在求翻轉(zhuǎn)段初值時,先忽略翻轉(zhuǎn)過程中氣動阻力產(chǎn)生的力矩,然后給定發(fā)動機推力和擺角,積分到俯仰角等于給定的θs且垂直速度等于vys時結(jié)束,積分結(jié)果作為翻轉(zhuǎn)段初值。θs取90°附近的值便于后續(xù)垂直著陸。速度vys不能太大,需要保證著陸時速度能減到0。在計算著陸段初值時,求解在問題P0著陸段基礎(chǔ)上簡化得到的凸優(yōu)化問題,以簡化問題的解作為著陸段初值。具體來說就是給定簡化問題的著陸時間,忽略氣動力,關(guān)于速度的動力學(xué)方程不考慮質(zhì)量變化,不考慮姿態(tài)動力學(xué)和發(fā)動機擺角,并滿足部分過程和終端約束,即求解如下凸優(yōu)化問題:
式中x0取翻轉(zhuǎn)段末端狀態(tài);γT為推力方向和y軸間允許的最大夾角;ε為松弛變量;不使用ε計算初值的優(yōu)化問題可能無解。 上述優(yōu)化問題中不包括θ,ω,δ,δd。俯仰角θ根據(jù)推力方向計算,引入推力方向約束就是為了避免通過推力方向計算的俯仰角過大,ω通過對θ進行差商得到,δ(t) =δd(t) =0。求解上述凸優(yōu)化問題可以得到一個較好的初值,且計算效率高。仿真部分將比較本初值選取方法和線性初值選取方法對算法1的影響。
3 數(shù)值仿真
本節(jié)將通過數(shù)值仿真來分析類星艦飛行器翻轉(zhuǎn)著陸問題的特性,希望能為相關(guān)任務(wù)設(shè)計提供一定的參考。本節(jié)數(shù)值仿真主要參考星艦公開的參數(shù)[13],部分重要參數(shù)見表1。本文在實現(xiàn)算法1 時使用了凸優(yōu)化求解器ECOS[14]。
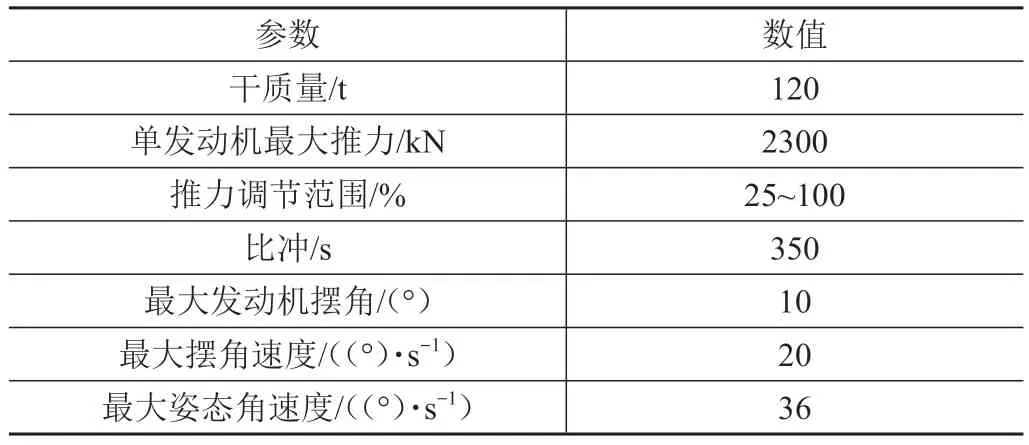
表1 飛行器參數(shù)Tab.1 Vehicle configurations
飛行器高l= 50 m,lcg= 0.6l,lcp= 0.55l。飛行器初始位置r0=[360 1200]Tm,初始速度v0=[-18.82-106.73]Tm/s,θ0= 170°,ω0= 0(°)/s,m0= 132 t。用于計算的初值θs= 80°,vys=-20 m/s。翻轉(zhuǎn)過程使用3 臺發(fā)動機,著陸使用2 臺發(fā)動機。末端位置rf=[0 0]Tm,末端速度vf=[0 -0.1]Tm/s,θf= 90°,ωf=0(°)/s。邊界約束中θ(1)max= 170°,θ(1)min= 45°,θ(2)max=105°,θ(2)min= 75°。算 法1 參 數(shù):N1= 40,N2= 50,λvc= 103,λtr= 5 × 10-5,收斂判據(jù)?vc= 1 × 10-8,?tr=1 × 10-8,目標函數(shù)中μ=0.3。
使用圖4算法求解該算例時,迭代7次收斂,翻轉(zhuǎn)段耗時2.43 s,著陸段耗時13.61 s,整個過程消耗燃料9.773 t。圖5 展示了優(yōu)化結(jié)果:圖5a 展示了翻轉(zhuǎn)著陸過程的路徑點和推力方向。圖5b展示了俯仰角和俯仰角速度的變化,最大的俯仰角速度小于給定上界36 。優(yōu)化的控制量繪制在圖5c和圖5d中,由于目標函數(shù)考慮了讓翻轉(zhuǎn)過程高度差較小,所以翻轉(zhuǎn)時先以最大推力和最大擺角加速翻轉(zhuǎn),接著使用小推力翻轉(zhuǎn),同時擺角開始減小為接下來減小俯仰角速度做準備,然后在著陸段開始時以最大推力和最小擺角為翻轉(zhuǎn)過程減速,即降低俯仰角速度。整個翻轉(zhuǎn)著陸過程推力幾乎是砰—砰(bang-bang)形式,發(fā)動機擺角不大于10°。
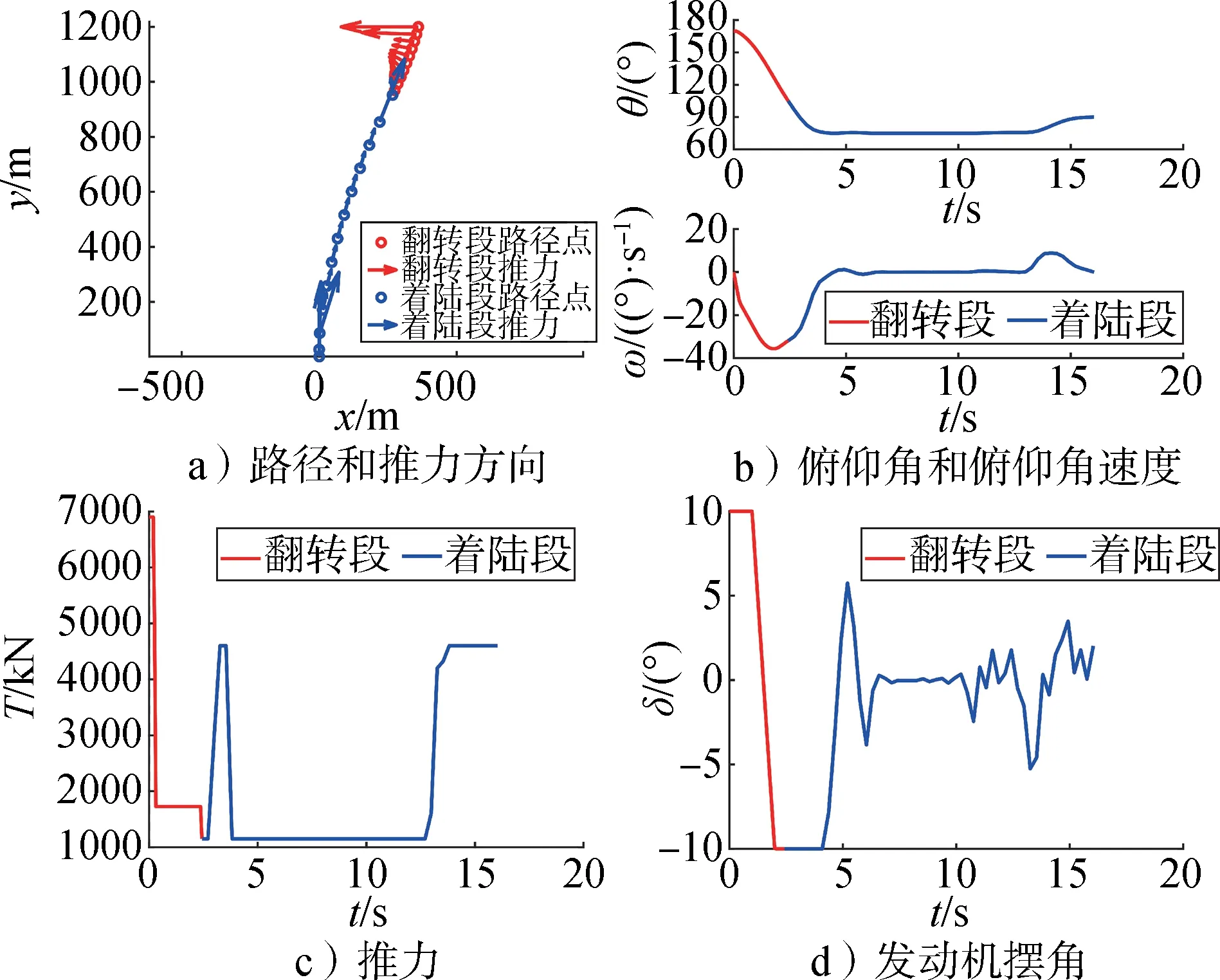
圖5 飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化結(jié)果Fig.5 Optimized results of the flipping and landing trajectory of the Starship-like vehicle
接下來改變部分仿真條件,深入研究類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化問題的性質(zhì),并將對應(yīng)結(jié)果與圖5中的結(jié)果進行比較。
3.1 不同初值選取方法的影響
對于復(fù)雜的軌跡優(yōu)化問題,初值選取對于序列凸優(yōu)化算法的收斂性有較大影響。這一小節(jié)將比較線性初值和本文初值選取方法對算法1的影響。
使用線性初值,算法1 迭代9 次后收斂,比使用本文初值選取方法多了2次迭代,從圖6a可以看出使用本文初值收斂更快。翻轉(zhuǎn)段耗時2.38 s,著陸段耗時14.02 s,整個過程消耗燃料9.947 t,比使用本文初值多消耗174 kg。圖6c 展示了推力剖面的對比,使用線性初值時,推力不是砰—砰形式。此外,使用線性初值時,發(fā)動機擺角剖面也不如使用本文初值時那么平緩,如圖6d所示。大量仿真實例表明算法1使用本文初值選取方法比線性初值收斂性更好,在有些使用線性初值無法收斂的情況下,使用本文初值也能收斂。本文初值選取方法不僅提高了算法的收斂性,而且優(yōu)化的推力和發(fā)動機擺角剖面更適合工程使用。
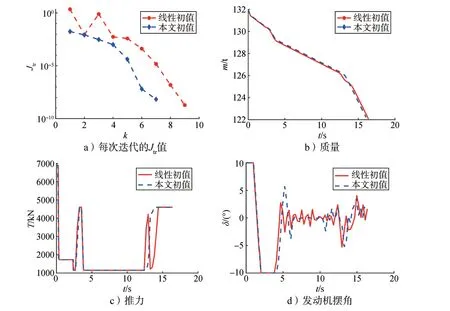
圖6 使用線性初值和本文方法確定的初值的結(jié)果對比Fig.6 The comparison between the results with linear initial guess or the initial guess obtained by the proposed method
3.2 發(fā)動機擺角響應(yīng)相關(guān)約束的作用
在3.1 節(jié)中說明了引入發(fā)動機擺角響應(yīng)和相關(guān)約束的作用——避免求解的發(fā)動機擺角振蕩。這一小節(jié)將給出不使用發(fā)動機擺角響應(yīng)δd而其它部分都相同時的計算結(jié)果。
如前所述,使用δd的算例迭代7 次收斂,而不使用δd的算例迭代20次未收斂。圖7給出了使用和不使用δd計算結(jié)果的對比(不使用擺角響應(yīng)的算例20次迭代未收斂,這里畫了第20次迭代中的解),圖7a和圖7c顯示兩個算例計算的推力和速度剖面幾乎相同,但是發(fā)動機擺角差別較大,不使用δd的算例得到的發(fā)動機擺角(見圖7b 中紅色實線)著陸前出現(xiàn)了劇烈的振蕩。從圖7d可以看出不使用δd時,Jtr還未小于?tr就不再減小,因此不使用δd的算例沒有收斂。發(fā)動機擺角劇烈振蕩是此算例不好收斂的主要原因。
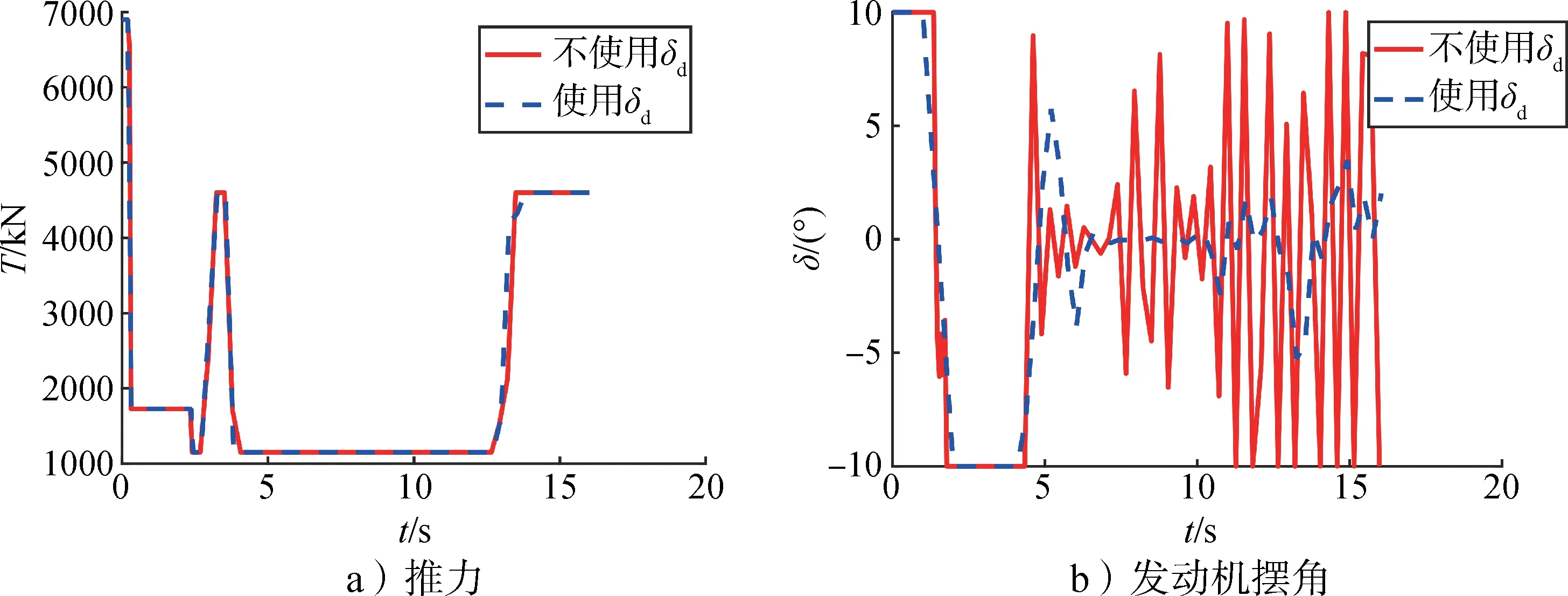
圖7 不使用和使用擺角響應(yīng)約束求解結(jié)果的對比Fig.7 The results solved with and without δd
3.3 著陸使用發(fā)動機臺數(shù)的影響
仿真使用的飛行器的發(fā)動機推力較大,足以實現(xiàn)單臺發(fā)動機著陸。這一小節(jié)給出單臺發(fā)動機和兩臺發(fā)動機著陸時的對比結(jié)果。翻轉(zhuǎn)段仍然使用三臺發(fā)動機。
使用單臺和兩臺發(fā)動機著陸的算例都是迭代7次收斂。圖8展示了使用單臺和兩臺發(fā)動機著陸時優(yōu)化的控制量,兩個算例推力變化趨勢相近,兩臺發(fā)動機著陸時大推力持續(xù)時間更短。單發(fā)動機著陸消耗燃料10.727 t,兩臺發(fā)動機著陸消耗燃料9.773 t,少消耗954 kg燃料。由此可見飛行器的推力設(shè)計對其著陸燃料消耗也是有一定影響的。
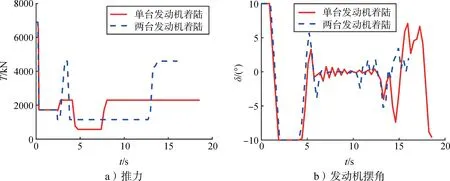
圖8 單臺發(fā)動機和兩臺發(fā)動機著陸的控制量對比Fig.8 The differences of controls between one-engine landing and two-engine landing
3.4 先翻轉(zhuǎn)再著陸和邊翻轉(zhuǎn)邊著陸的比較
上文的仿真算例中,目標函數(shù)中的懲罰系數(shù)μ都取0.3,當目標函數(shù)中μ取0時目標函數(shù)就變成了最省燃料,因為不考慮對翻轉(zhuǎn)過程高度差的優(yōu)化,可能出現(xiàn)翻轉(zhuǎn)剛結(jié)束飛行器就接近地面的情況,這里把這種優(yōu)化目標對應(yīng)的優(yōu)化問題P0稱為邊翻轉(zhuǎn)邊著陸問題;μ= 0.3 時目標函數(shù)表示先翻轉(zhuǎn)再著陸的同時節(jié)省燃料,這種優(yōu)化目標對應(yīng)的問題P0就是本文主要討論的先翻轉(zhuǎn)再著陸問題。本節(jié)將通過仿真比較兩種著陸方式的結(jié)果。
先翻轉(zhuǎn)再著陸和邊翻轉(zhuǎn)邊著陸兩個算例都迭代7 次收斂,邊翻轉(zhuǎn)邊著陸時燃料消耗8.844 t,比先翻轉(zhuǎn)再著陸少消耗929 kg燃料。圖9展示了兩個算例的仿真結(jié)果對比。圖9a是飛行器俯仰角和俯仰角速度變化曲線,可以看出邊翻轉(zhuǎn)邊著陸(μ= 0)時翻轉(zhuǎn)過程變長,翻轉(zhuǎn)過程變慢。圖9b 顯示了質(zhì)量變化,邊翻轉(zhuǎn)邊著陸更省燃料,因為其目標函數(shù)就是最省燃料。圖9c 和圖9d 是兩個算例推力和發(fā)動機擺角的對比。邊翻轉(zhuǎn)邊著陸的前期使用最小推力,因為不需要快速翻轉(zhuǎn);著陸前先最小推力再最大推力。這個邊翻轉(zhuǎn)邊著陸的算例中翻轉(zhuǎn)段耗時較短,有些算例中邊翻轉(zhuǎn)邊著陸問題中翻轉(zhuǎn)過程可以占整個飛行時間的一半以上。
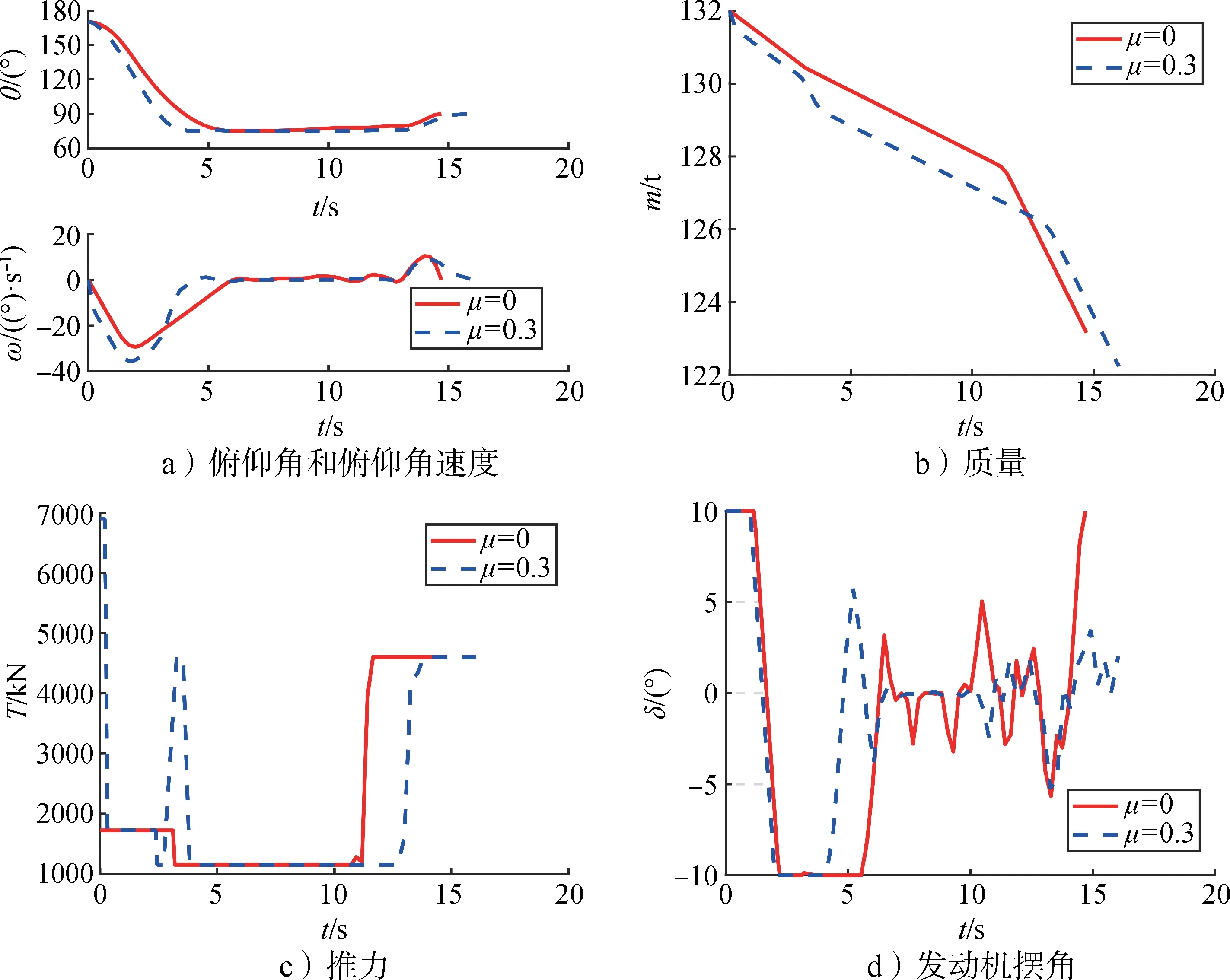
圖9 先翻轉(zhuǎn)再著陸和邊翻轉(zhuǎn)邊著陸的結(jié)果對比Fig.9 The comparison between flipping before landing case and flipping while landing case
4 結(jié) 論
本文對類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化問題進行了建模,設(shè)計了用于求解該問題的序列凸優(yōu)化算法。為了提高算法的收斂性,該算法引入虛擬控制,懲罰信賴域,并給出了較好的初值計算方法。通過數(shù)值仿真可以發(fā)現(xiàn),在求解考慮姿態(tài)動力學(xué)的類星艦飛行器翻轉(zhuǎn)著陸軌跡優(yōu)化問題這樣一個強非線性軌跡優(yōu)化問題時,與一般的序列凸優(yōu)化算法相比本文設(shè)計的算法收斂性有很大提高。本文給出的翻轉(zhuǎn)著陸過程的軌跡優(yōu)化結(jié)果可以為相關(guān)飛行器的研發(fā)提供一定的參考。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
