大中型液體運載火箭水平起豎與發射技術
2024-03-05 08:30:00劉聰聰荊慧強賈永濤
導彈與航天運載技術 2024年1期
劉聰聰,荊慧強,賈永濤,樊 蕾,范 虹
(北京航天發射技術研究所,北京,100076)
0 引 言
《國家民用空間基礎設施中長期發展規劃(2015—2025)》中提到計劃在2030 年前后中國將發射近450 顆衛星,其中SSO 軌道衛星約占50%,1 t 至4.5 t衛星則占SSO軌道衛星的66%。
針對中低軌航天器發射任務,開展了CZ-8 運載火箭的研制工作,其SSO運載能力4.5 t,擬采用“三平”測發模式(箭體水平總裝、水平測試、水平轉運),并針對目前航天發射任務高密度化的趨勢,提出了快速智能測發的新要求[1-4]。
大中型火箭水平起豎與發射技術是實現大中型液體運載火箭“三平”測發模式的關鍵環節,需要完成大中型帶助推火箭水平總裝、水平運輸、在發射工位準確對接及平穩起豎,在此基礎上進一步實現加注與發射流程中供氣的智能控制,實現快速發射。地面發射支持系統是火箭系統的分系統之一,本文重點介紹地面發射支持系統所采取的相關新技術。
1 地面發射支持系統發展趨勢
目前,各國的火箭測試發射模式已由三級(分級組裝、分級測試、分級運輸)轉為三垂(整體垂直組裝、整體垂直測試、整體垂直運輸)、三平(整體水平組裝、整體水平測試、整體水平運輸),發射控制則由近距離發射控制模式向遠距離高度自動化測試發射模式發展,測控也在逐步向天基過渡,地面發射支持系統的健康管理成為趨勢。
各國在早期發射火箭時,普遍采用的是分級水平測試、分級水平運輸和分級起豎的模式。美國在20世紀50年代進行了改進,取消了技術廠房測試,箭體在技術廠房經外觀檢查和狀態恢復后,分級水平運往發射陣地,在發射臺上起豎、組裝、測試和發射,這也是目前CZ-3A系列采用的模式,稱為“一平兩垂”(水平運輸、垂直組裝、垂直測試)。其優點是測試狀態和發射狀態一致,對于地面發射支持系統來講技術成熟,可靠性高,發射臺不需要具有行走功能。但是也存在發射陣地環境條件較差、操作不如技術廠房等不足。另外,由于火箭的主要測試和操作在發射陣地開展,發射陣地設備較多,發射工位占用時間長。
美國在使用土星V火箭發射阿波羅飛船時采用了“三垂”的測發模式,后來歐洲阿里安發射場、日本吉信發射場也采用這種模式,在中國目前主要為CZ-2F、CZ-5和CZ-7運載火箭所采用,其特點為在垂直廠房內將火箭垂直組裝至活動發射平臺上并進行測試,測試通過后整體垂直運往發射陣地。其優點為火箭的組裝和測試在技術廠房內進行,環境條件好,同時減少了發射陣地的占用時間,可以提高發射工位使用效率,發射陣地的設備也較少;其缺點為發射支持系統產品較為復雜,特別是發射平臺,需具有行走功能,且部分設備設置在發射平臺內,工作條件和維修條件不夠好。“三垂”測試發射模式對于地面發射支持系統來講具有同樣成熟的技術。
“三平”測試發射模式最早為蘇聯在發射東方號、上升號和聯盟號飛船時所采用,至今在俄羅斯仍然被廣泛應用。其特點是在技術廠房內將火箭水平整體組裝至轉運起豎車上并進行測試,測試完成后整體水平運輸至發射陣地,然后整體起豎至發射臺上進行發射。蘇聯的聯盟號、質子號、能源號和天頂號,美國的德爾塔4、法爾肯9 等火箭采用的就是這種模式,中國的CZ-6 也是采用這種模式。其優點與“三垂”的測發模式類似,但是地面設備和發射場所需要的建造費用更低,不需要研制建造造價高昂的垂直組裝廠房和活動發射平臺,但是也存在測試狀態與發射狀態不一致、對箭體結構強度要求較高等不足。
通過對國內外發射模式進行分析和整理,目前采用“三垂”測發模式的火箭主要有:CZ-7、CZ-5、CZ-2F、美國土星V、法國阿里安5、日本H-2A 等;采用“三平”測發模式的火箭有:CZ-6、天頂號、聯盟號、安加拉、質子號、德爾塔ⅠV、法爾肯9等。采用“一平兩垂”測發模式的火箭有:CZ-2C、CZ-3A、CZ-4B 等。對3 種發射模式進行對比,項目及結果詳見表1。
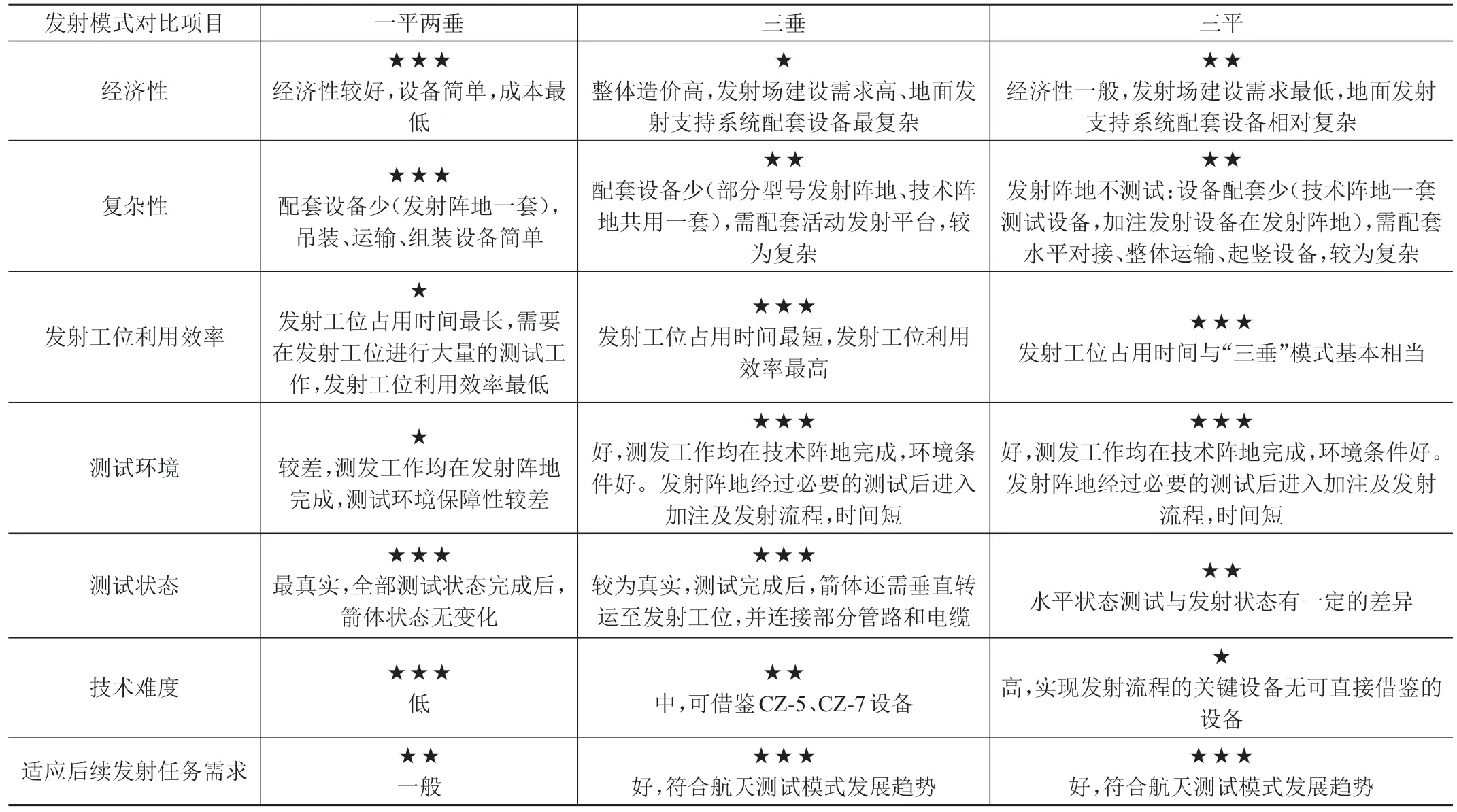
表1 不同測試模式優缺點對比表Tab.1 Comparison table of different test modes
綜上所述,無論是“三平”還是“三垂”,世界各國的火箭測發模式都從分級向整體轉變,整體組裝、整體測試和整體運輸已經成為了趨勢[1-10]。
基于“三平”測發模式的液體型號火箭,目前中國僅有CZ-6 火箭。CZ-6 火箭無助推器,全箭尺寸規模相對較小,對于大中型捆綁型火箭的“三平”測發技術,還需要開展技術攻關工作。結合CZ-8 型號研制需求,地面發射支持系統針對大中型液體運載火箭水平起豎與發射技術開展了相關研制工作,本文主要從箭體水平組裝技術、整體轉運起豎對接技術、智能供配氣技術3個方面進行闡述。其中箭體水平組裝技術、整體轉運起豎對接技術重點解決以CZ-8 火箭為代表的大中型火箭水平起豎技術問題,智能供配氣技術主要滿足CZ-8火箭快速測發需求。
2 大中型液體運載火箭水平起豎技術
箭體水平組裝技術與整體轉運起豎對接技術配合使用,適用于“三平”測發模式。其主要優點為:降低對發射場的建設要求,縮短發射工位占用時間。但其對地面發射支持系統的要求增加,新增加了箭體水平組裝、整體轉運起豎與發射臺對接的需求。
2.1 箭體水平組裝技術
箭體水平組裝的核心為箭體在水平狀態下的自由度調整能力,可分為支架車水平組裝和吊具組裝兩個方案。
a) 支架車水平組裝方案。
箭體水平狀態停放在支架車上,支架車具備橫向、縱向、垂向、整體滾轉4 個自由度的調節功能。通過對支架車的調整實現對箭體姿態的調節,適應箭體水平組裝。支架車高度調節可采用升降機的結構形式;通過車的整體移動實現前后調節;可采用直線導軌與頂桿的結構形式實現左右調節;整體滾轉可采用弧形導軌與頂桿的結構形式,該方式僅能適應箭體在小范圍內的滾轉,一般不宜超過5°。
支架車結構示意見圖1。每級箭體使用支架車,每個支架車具備4個自由度調整能力,兩個支架車組合后能夠具備箭體模塊六自由度調整能力。當箭體需要大角度調整時,則需對支架車進行改進,新增加滾轉環,用于固定箭體,滾轉環與支架車一起配合使用,實現箭體大角度調整,滾轉環的結構示意見圖2,該方式可實現箭體360°滾轉。箭體在方位調整過程中最關鍵的操作項目為保持動作的一致性,需保證箭體兩個支架車調節動作協調一致,避免滾轉調整過程中因為支架車動作不一致對箭體產生附加力。
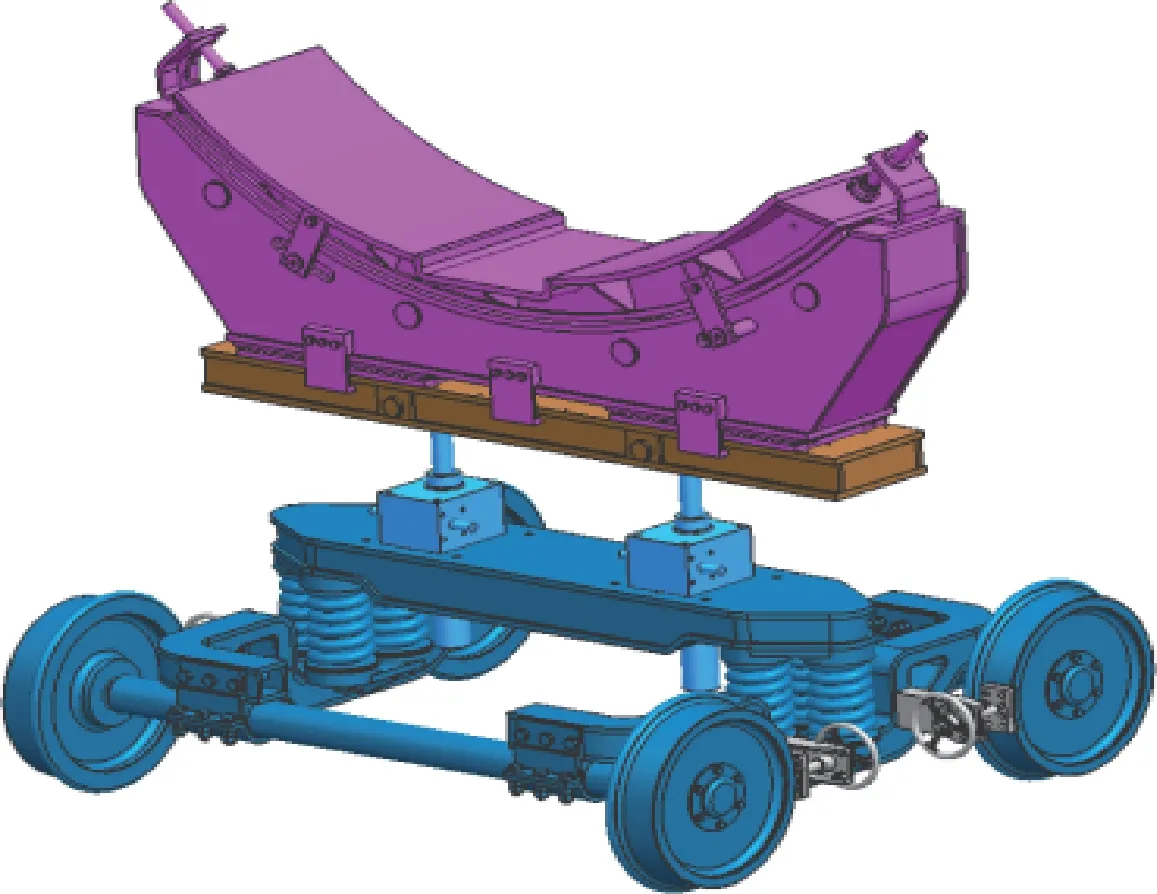
圖1 水平組裝支架車結構示意Fig.1 Structure of horizontal assembly bracket car
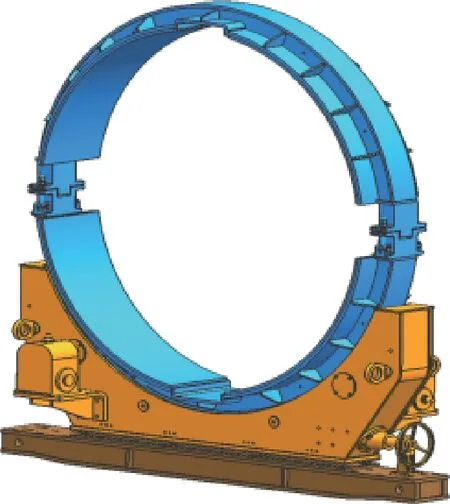
圖2 大角度滾轉環結構示意Fig.2 Structure of large angle rolling ring
b)吊具組裝方案。
采用可自由調整的吊具,通過吊車移動及吊具狀態調整,實現對箭體方位的調整,以滿足箭體水平組裝對接的需求。吊具采用雙鉤吊具,吊裝狀態示意見圖3。通過雙吊車的移動,可實現橫向、縱向、垂向、垂直擺動4個自由度的調節功能。在單側吊帶上設置一套調節機構,調節機構的主要功能為對吊帶的長度進行帶載調節,可選擇手動或電動形式,通過吊帶調節可以實現箭體模塊滾轉,通過人工可實現箭體模塊的橫向小幅度擺動。
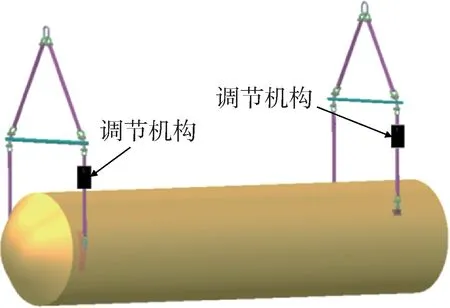
圖3 雙三角架吊具吊裝示意Fig.3 Schematic of spreader
2.2 整體轉運起豎對接技術
整體轉運起豎對接設備的主要功能是完成水平組裝后火箭由技術區至發射區的轉運工作,并在發射區通過起豎的形式完成火箭與發射平臺的對接工作。與傳統的分級吊裝后在垂直狀態與發射平臺進行組裝相比,特點為:傳統的吊裝方案,吊具是柔性的,箭體與發射平臺對接過程中有一定的自由度調整能力;起豎設備通常為剛性連接狀態,一旦開始起豎箭體,則難以對火箭方位進行調整,或者說調整方案可實現性較差,且存在較大的風險。整體轉運起豎對接技術最核心的技術是火箭起豎對接調整及定位技術,實現火箭與發射平臺的精確對接,并需對對接精度指標進行合理分配,保證各單機設備的合理性和經濟性。
整體轉運起豎對接設備按照運輸方式可分為軌道運輸和公路運輸兩類,按照起豎結構可分為整體式和分體式兩類。上述類型各有優缺點,本文主要針對公路運輸分體式起豎技術進行介紹。
整體轉運起豎對接設備由轉運車、起豎托架、地面起豎裝置3大部分組成,如圖4所示。
圖4 整體轉運起豎對接設備示意Fig.4 Schematic of overall transfer erection and docking equipment
轉運車的主要功能為實現運輸及停車定位;起豎托架主要用于支撐固定箭體,保證箭體在水平運輸及起豎工況下的安全性和穩定性;地面起豎裝置固定在發射區,主要提供起豎力,并保證起豎后與發射平臺的對接精度。
參與起豎的設備較多,影響起豎后火箭與發射平臺對接精度的因素較多,需要充分考慮各影響因素,并進行科學合理分配,保證方案的合理性和經濟性。針對地面發射支持系統依據型號的特點對對接精度影響因素進行了識別及初步精度分配,具體見表2。在精度分配過程中,充分考慮了整體的經濟性,避免單一設備精度指標要求過高。

表2 運輸起豎對接精度分析Tab.2 Accuracy analysis of transportation erection and docking
整體轉運起豎對接設備在方案設計過程中需重點關注以下方面:
a)起豎工況決定了起豎托架必然會產生一定的變形,在對起豎托架進行優化的同時,要關注起豎托架的變形與箭體之間的協調性,箭地連接宜采用具有回轉自由度的結構形式,避免起豎托架的變形施加在箭體結構上。
b)起豎托架與地面起豎設備之間的對接精度由運輸車的停車調整精度來保證,可在運輸車上設置方位調節機構,通過運輸車粗定位與方位調節機構精確調整組合的形式,保證起豎托架與地面起豎設備之間的對接精度,通過調節精度的合理分配,可降低總研制成本。
c)起豎托架方位自動調節功能:可通過激光雷達感知系統感知起豎托架與地面起豎設備之間的相對位置關系,并通過PLC 對方位調節執行元件進行控制,實現自動調節功能。
d)起豎托架與地面起豎設備之間的對接鎖緊適宜配套自動鎖緊/解鎖機構。動作元件可采用液壓油缸或電動缸,其中液壓油缸用于需要施加主動力的工況,電動缸用于被動保持位置的工況。可采用杠桿形式作為執行機構,實現對起豎托架與地面起豎裝置之間的自動鎖緊和解鎖。
e)起豎過程平穩性控制。起豎過程中,起豎產品的合成質心圍繞回轉中心轉動,前半程起豎油缸承受壓力,后半程當質心超過回轉中心后承受拉力。需要重點識別該項變化并加以控制。
針對起豎托架剛度,開展了專項分析工作。由于箭體本身結構尺寸要求及起豎設備展長比不足等條件限制,托架結構長徑比值較大且懸臂較長,起豎工況下,末端變形量大,對箭體的影響較大,需要開展托架結構優化設計工作,在控制自重的情況下,進一步提高剛度。
通過托架承載模型簡化,確定托架變形優化目標函數,最后根據參數優化,控制托架變形,簡化模型見圖5,優化目標函數見式(3)。
圖5 托架承載簡化模型Fig.5 Simplified model of bracket bearing
根據簡化模型可得位置C處的變形量,即:
其中:
式中qm為質量引起的載荷;qP為外部作用力引起的載荷。且由于:
因此:
從上式中可以看到,托架剛度主要取決與托架結構尺寸、質量及外部載荷。其中外部載荷由箭體決定,可視為常量。因此提高托架剛度,減小托架變形,可以通過減輕質量、增大托架寬度或高度值來實現,其中影響權重較大的是托架的高度值。
通過采取減輕質量、增加寬度兩個措施,進一步提升起豎托架剛度。采用ANSYS 軟件對起豎工況進行仿真,仿真結果見圖6至圖8,主要數據見表3。
圖6 初始桁架結構Fig.6 Ⅰnitial truss structure

圖7 桁架結構+減重Fig.7 Ⅰnitial truss structure and weight loss status
圖8 桁架結構+減重+增寬Fig.8 Ⅰnitial truss structure, weight loss status and widening state
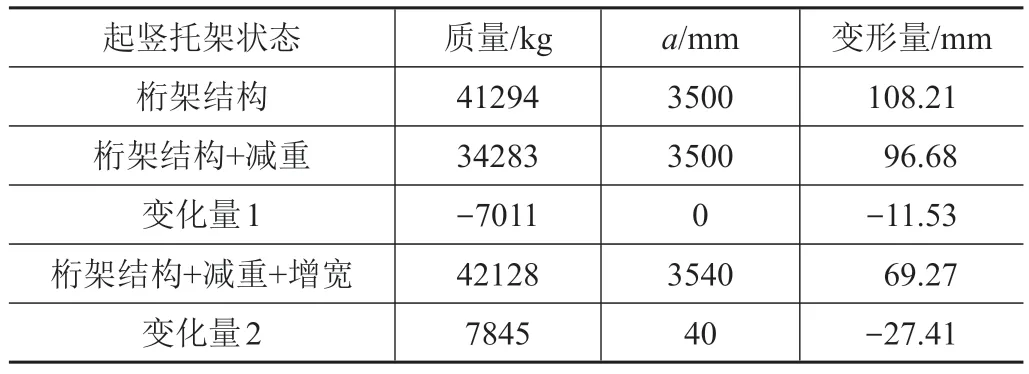
表3 起豎托架剛度優化對比Tab.3 Comparison of rigidity optimization of erecting bracket
通過減重及增加結構寬度進行變形對比,其中質量減少7 t,變形量減少11.53 mm,則變形量與質量變化量的比值η= 1.65;增加結構寬度40 mm 的同時結構質量自然增加7.8 t,變形量減少27.41 mm。根據η= 1.65 可知,質量增加7.8 t,則變形量增加13.1 mm,故寬度a對變形的影響達14.31 mm。通過上述改進措施,可將起豎托架變形量由108.21 mm減少至69.27 mm。
3 智能供配氣技術
3.1 智能供配氣總體方案
與傳統的供氣系統相比,智能供氣系統可實現無人值守、自動工作、故障診斷及處理。系統的重點在于供氣壓力、流量、溫度調控可通過遠程方式、實時自動控制完成。系統中最關鍵的元件為智能減壓閥,智能減壓閥可通過通信接口與后端進行通信,接收后端發出的指令對減壓閥出口壓力進行調整,并將減壓閥相關的參數傳遞給后端,可實現供氣壓力的遠距離智能控制。
智能供氣系統包括氣路及機械、電控部分。其中,氣路及機械部分主要完成氣體狀態控制和輸送的執行功能;電控部分含軟、硬件兩部分,主要完成設備供電,傳感器信號采集,各類數據存儲、處理、運算、決策、反饋、控制、通信等功能。電控部分采用模塊化、通用化設計,包括電源模塊、控制采集模塊、負載驅動模塊等。
智能供氣系統功能組成見圖9。圖9 中實線方框為硬件模塊,虛線方框為軟件模塊。硬件系統主要包括氣體控制閥、中央控制器、繼電器、傳感器、人機交互系統等模塊。軟件系統主要可實現自動供氣、狀態監測、故障診斷、健康管理等子功能。氣路部分可按照功能劃為氣源控制模塊、壓力調節模塊和供氣狀態控制模塊3個模塊。功能模塊劃分示意見圖10。電路原理劃分為電源模塊、中央控制器、采集模塊、通信模塊、輸出模塊和人機交互模塊,電路原理如圖11所示[16]。
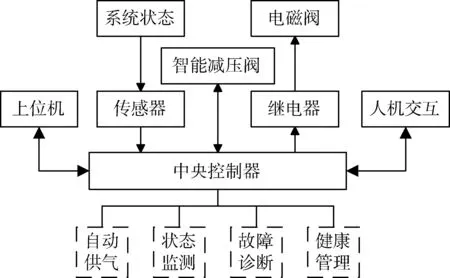
圖9 自動供氣系統Fig.9 Automatic air supply system
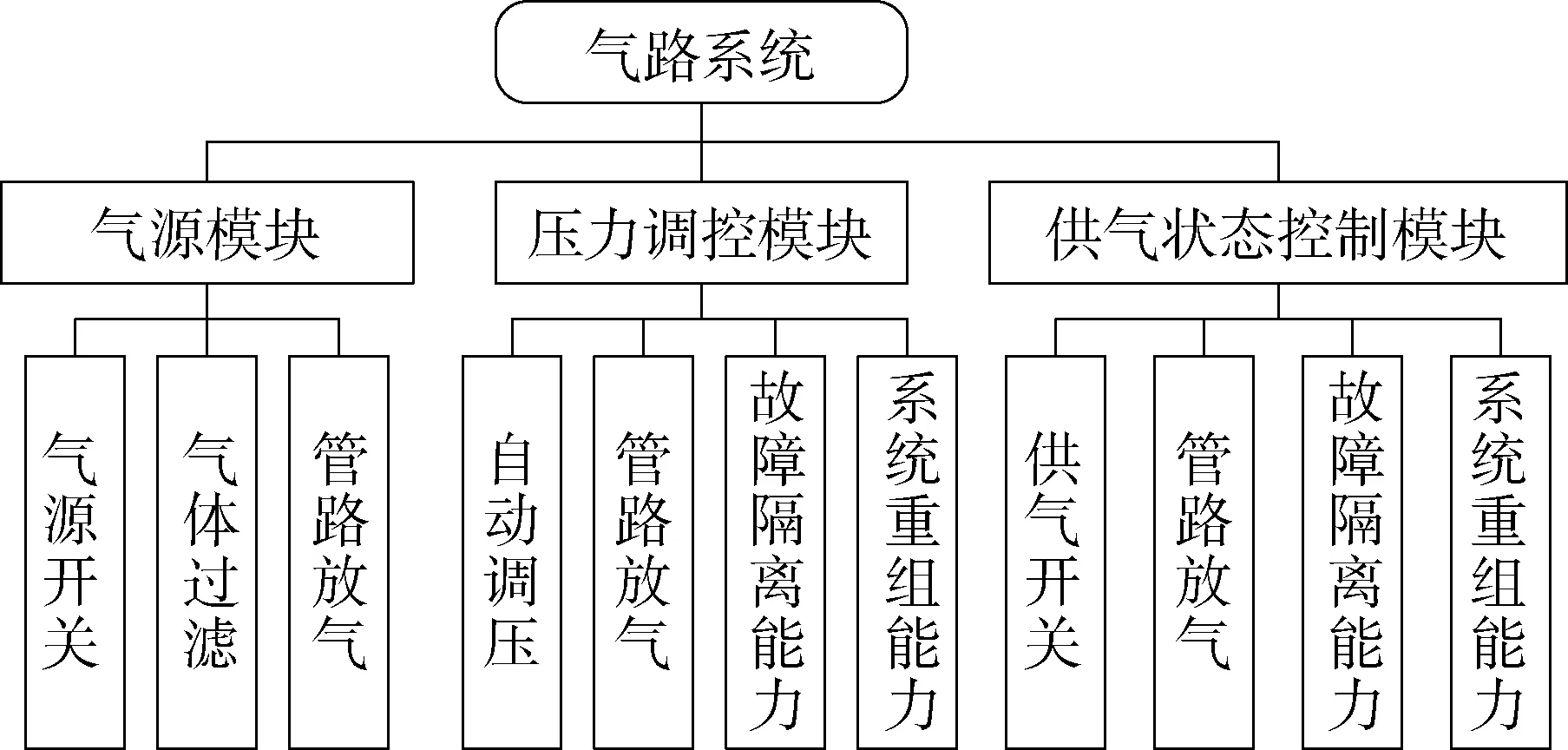
圖10 氣路原理功能Fig.10 Function of gas circuit principle
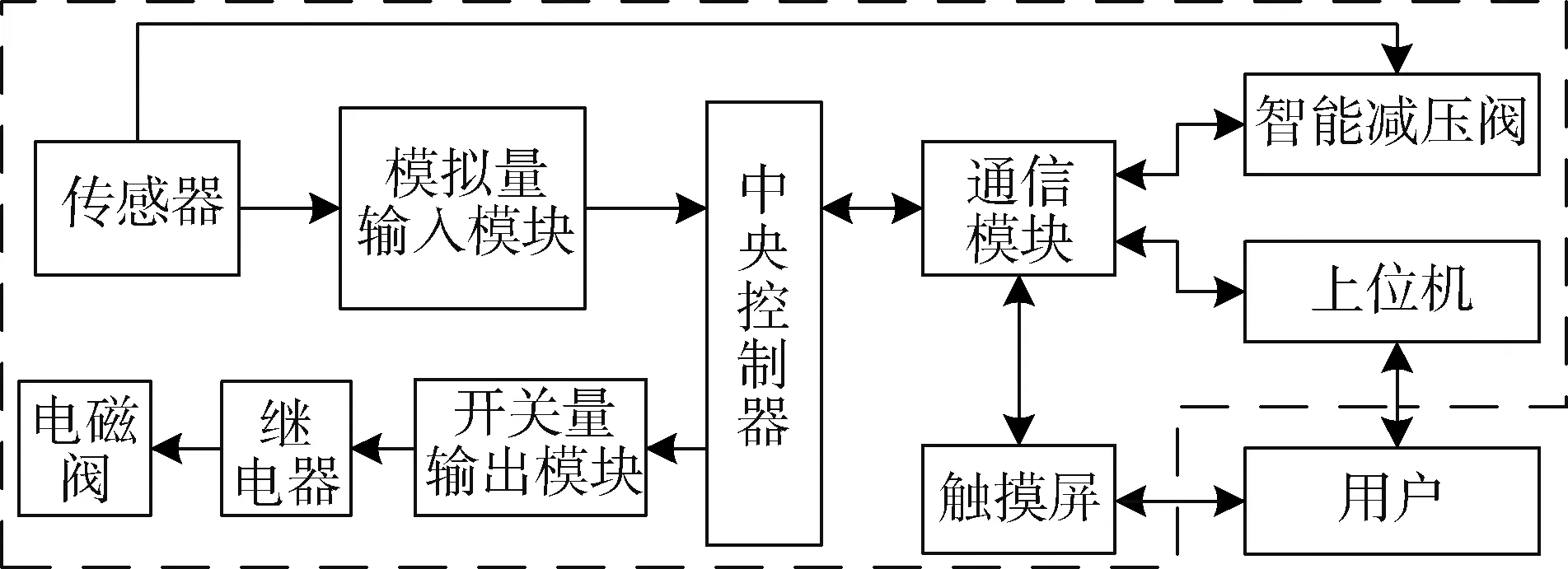
圖11 電路原理Fig.11 Circuit principle
智能供氣系統具備故障診斷及處理功能。可全流程監測供氣參數變化,并進行智能化的數據判讀,實現自動診斷,進行初步故障定位。對供氣系統可能造成故障的硬件、軟件、環境、人為因素等進行分析,形成故障樹,確定故障原因的各種可能組合方式。同時,從設備狀態監視與管控角度,根據故障樹分析結果,將專家系統和神經網絡技術應用于供氣系統故障診斷領域,融合供配氣專業專家經驗及神經網絡知識,建立對應的故障應對策略和故障處理建議等,形成完整的供氣系統故障診斷技術實現方案,并結合仿真、試驗工作,將測量結果和理論研究、仿真研究結果進行對比分析,修正供氣系統的故障診斷技術方案。
3.2 智能減壓閥
與傳統供氣系統相比,智能供氣系統的顯著特點是應用智能減壓閥,實現了壓力的遠程調控。智能減壓閥是實現供氣系統智能化的核心元件。在智能減壓閥研制領域,國外在低壓小流量工況中實現了一體化、小型化、集成化和自動化。在高壓大流量領域產品較少,僅TESCOM 的產品采用低壓氣控方式,組成了高壓大流量減壓系統,而非傳統的單個減壓閥,其系統復雜且尺寸大,難以直接應用。中國的智能減壓閥研究起步較晚,在智能化和自動化程度、覆蓋的壓力及流量范圍、產品化水平等很多方面都顯著落后于美國等發達國家,還未形成成熟的工業產品。
地面發射支持系統開展了高壓大流量智能減壓閥的研究,并實現了產品的小型化、集成化,其組成原理見圖12。智能減壓閥采用基于專家經驗和大量試驗數據的智能化控制策略,以模糊優化的高頻PWM(脈寬調制)技術實現對氣體壓力的高精度控制,同時減壓閥的主閥部分也針對設計工況進行了力平衡系統和流道結構、參數的優化設計,共同實現智能減壓閥對出口壓力的高精度控制。控制單元的硬件原理見圖13。

圖12 智能減壓閥模塊組成原理Fig.12 Schematic diagram of intelligent pressure reducing valve module
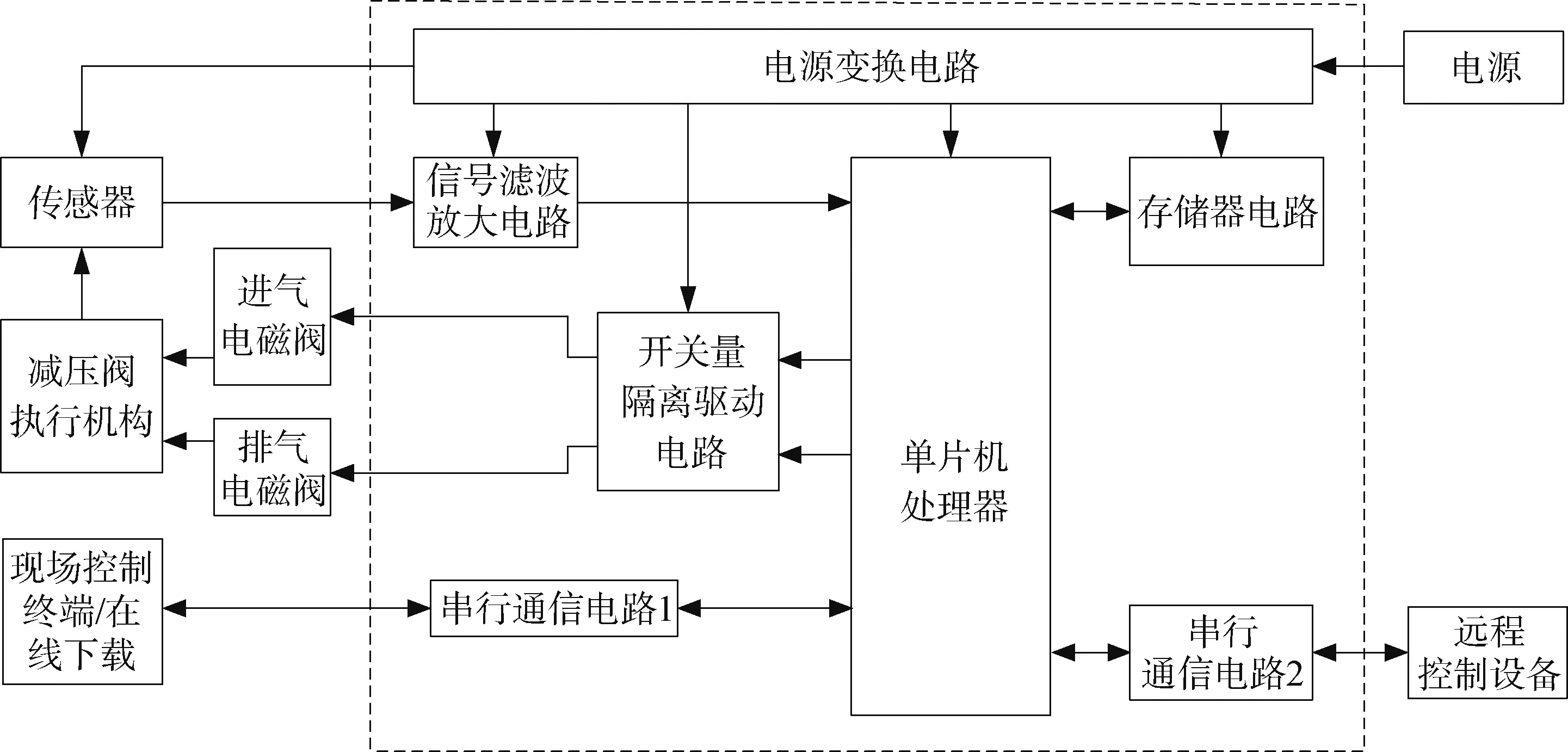
圖13 智能減壓閥控制單元硬件原理Fig.13 Hardware principle of intelligent pressure reducing valve control unit
智能減壓閥的控制原理見圖14。設計中的被控氣體壓力由于其自身的非線性、時滯性等因素,很難用常規的數學工具建立精確的數學模型,采用模糊控制技術對被控對象進行控制時,不需要建立數學模型,控制依據是基于專家經驗及大量試驗驗證數據,歸納出一套完整的控制規則,根據這些控制規則和模糊控制器的輸入進行模糊推理,得到精確的控制量,對減壓閥出口壓力進行高精度控制。
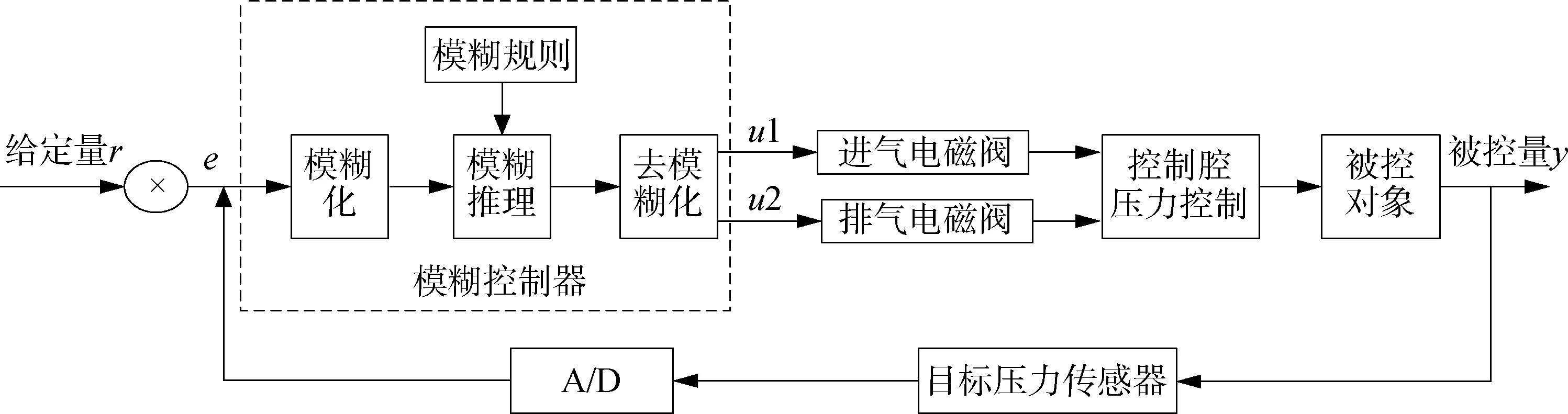
圖14 智能減壓閥控制原理Fig.14 Control principle of intelligent pressure reducing valve
從理論上講,模糊控制器所選用的控制維數越高,系統的控制精度也越高。但維數選擇太高,模糊控制規律過于復雜,基于模糊合成推理的控制算法的計算機實現也就更困難。根據智能減壓閥的特點及精度要求,其控制單元在模糊控制器設計時采用單輸入、雙輸出結構,以減壓閥出口壓力的誤差e為輸入,以進氣電磁閥u1 和排氣電磁閥u2 開合的時間為輸出,即控制進氣電磁閥和排氣電磁閥開合的脈沖占空比為輸出。將采樣得出的壓力偏差e(t)模糊化為相應的等級E,然后根據已獲得的模糊控制表,推算出模糊控制輸出量u1(t),u2(t)。K時刻的壓力為y(K),設定壓力值為r,則此時的偏差e(K) =r-y(K)[7]。
使用AMESim軟件搭建智能減壓閥模型,開展仿真分析,在多種工況下對壓力調控策略的正確性和控制參數的合理性等進行全面虛擬驗證。智能減壓閥典型仿真曲線見圖15。
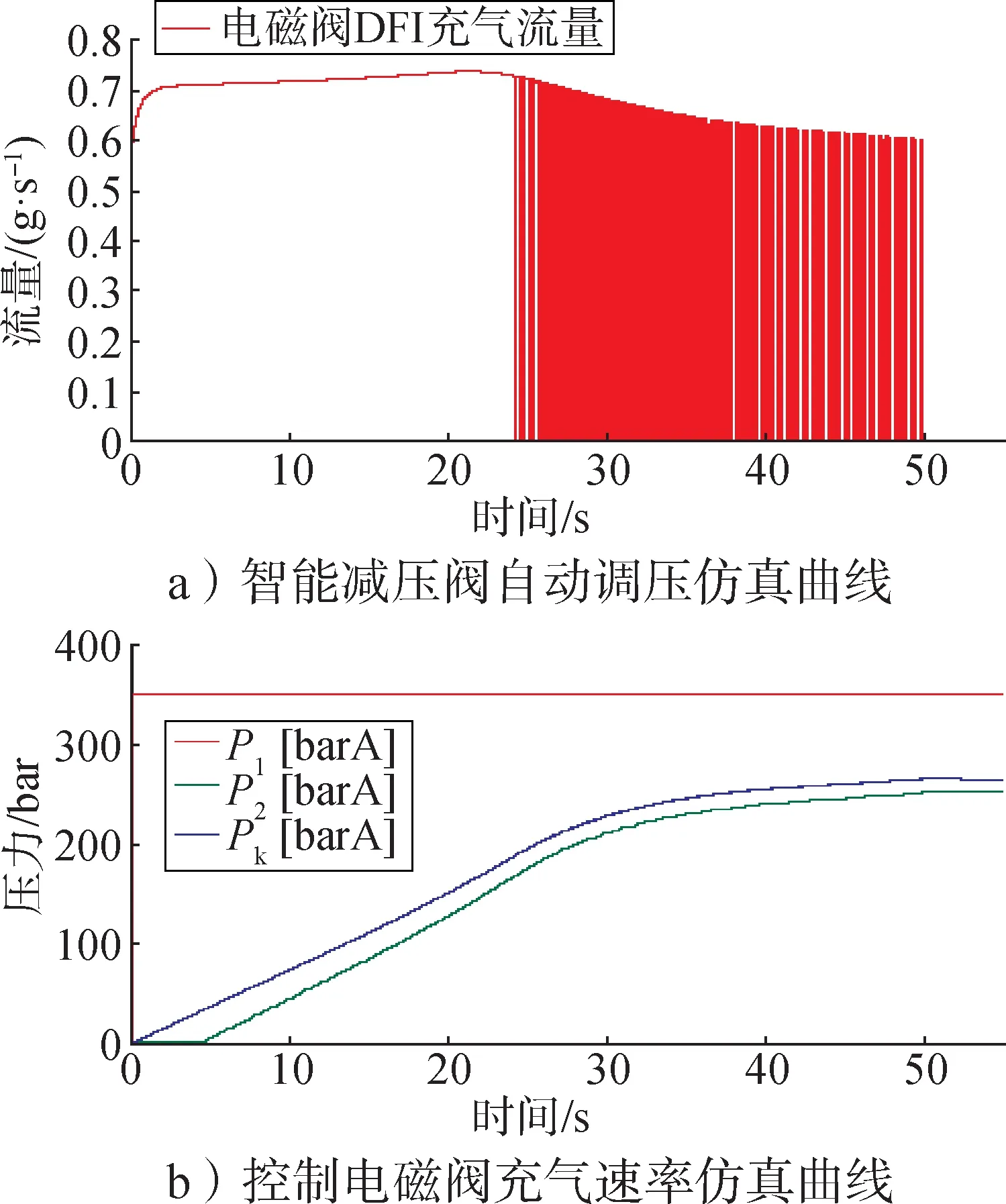
圖15 智能減壓閥典型仿真曲線Fig.15 Simulation model and typical simulation curve of intelligent pressure reducing valve
仿真結果表明:
a)入口壓力35 MPa,出口壓力由0 調整為25 MPa,這種減壓閥常見工況下,調壓所需時間為50 s左右,與傳統減壓閥人工調壓時間相當;
b)出口壓力穩定在25 MPa,調壓精度要高于傳統的人工調壓;
c)調壓過程可分為兩個階段,在遠離目標值時,調壓電磁閥處于打開狀態,壓力上升快(1~24 s),保證調壓時間;在接近目標壓力時,控制電磁閥開始進入高頻通、斷操作,此時減壓閥出口壓力上升速率變緩(24~50 s),可保證最終的調壓精度。
3.3 供配氣設備故障診斷技術
要實現供配氣設備的自動化故障診斷,對系統狀態進行全面有效的檢測是基礎。因發射過程中現場無人,因此系統所有的故障模式都是從后端上位機表現出來,某一故障模式的故障原因的判斷依據是否能通過后端現有信號獲取,即是否能實現故障的檢測和定位。以表4 為例,給出了供氣設備的部分動作或功能,以及與之對應的故障模式、故障原因和判斷依據。
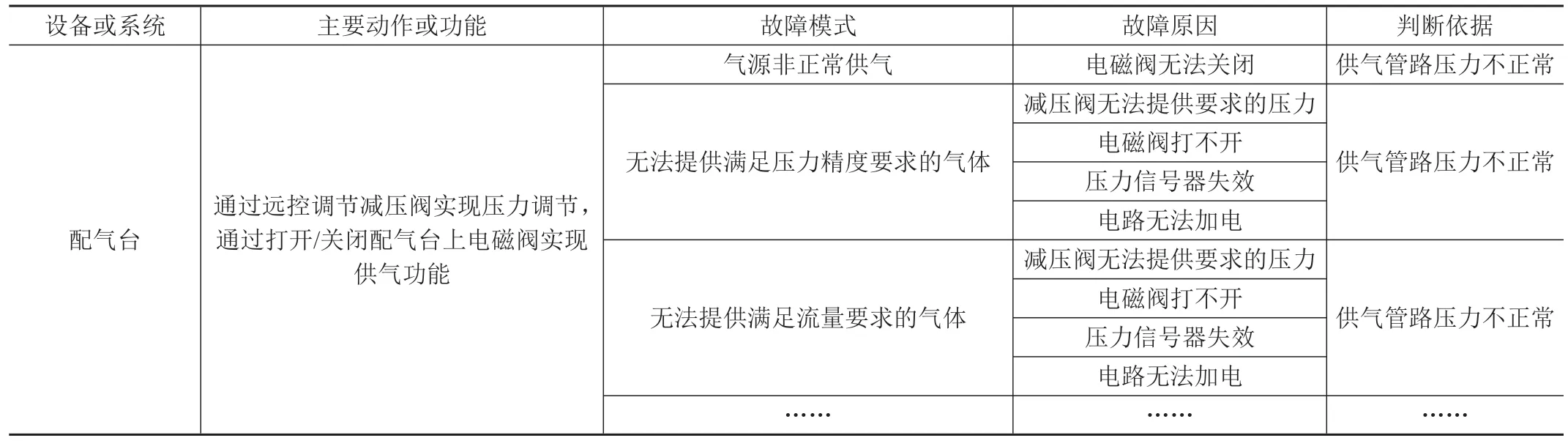
表4 故障原因和判斷依據示例Tab.4 Example of failure cause and judgment basis
射前流程中的實時故障診斷是實現動力系統無人值守的重要前提和基礎,而其關鍵是能夠實時提供用于發現和判斷故障的正確判據,保證各個實時監測的參數和信號出現故障時不漏判、不誤判。供氣設備實時故障診斷系統原理見圖16。圖16 中右側為實現實時故障診斷所需的專家庫查詢系統。實時專家庫查詢系統與動力測控系統上位機之間以TCP/ⅠP 通信的方式完成信號傳遞。
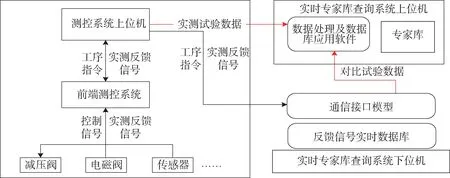
圖16 供氣設備實時故障診斷系統原理Fig.16 Principle of real time fault diagnosis system for gas supply equipment
供氣系統由位于后端的上位機和位于前端的測控機柜,配氣臺內的減壓閥、電磁閥、傳感器等組成,可實現對整個射前過程的控制和參數采集、狀態記錄存儲。動力測控系統上位機給前端設備發出工序或單點控制指令,同時接收前端設備返回的各個實測反饋信號。實時專家庫查詢系統由上位機和下位機組成。上位機中主要包括數據處理及數據庫應用軟件、專家庫查詢軟件。下位機中主要包括通信接口模型,實現前端設備信息的獲取。實時專家庫查詢系統的工作原理是在射前過程中實時采集射前流程測控系統的工序指令、單點控制指令和系統初始參數等外部輸入條件,通過在專家庫查詢系統下位機預先建立的低溫動力系統供氣設備實時反饋信號數據庫。然后在專家庫查詢系統上位機中將理論值作為判據,根據預設的判斷條件與實測反饋信號進行比較、查詢、匹配,出現異常時給出故障報警,同時根據系統已建立的故障樹和推理規則給出故障原因定位及解決措施建議。供氣設備專家庫模型基于供氣系統故障模式庫建立,同時結合動力系統供氣設備的FMEA、FTA以及其它實時監測參數,通過預設的推理規則可對異常原因進行分析、隔離并給出處理建議。
4 結束語
本文結合CZ-8 型號的任務需求,對大中型液體運載火箭水平起豎與發射技術進行了分析,從箭體水平組裝技術、整體轉運起豎對接技術、智能供配氣技術3方面進行了論述,提出了技術途徑,可進一步滿足火箭快速智能測發的需求,同時也為后續地面發射支持系統專業發展提供思路。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
人大建設(2019年12期)2019-05-21 02:55:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
