高速飛行器編隊通信保持控制與協(xié)同制導技術研究綜述
2024-03-05 08:29:58趙長見王辰琳黃建友
導彈與航天運載技術 2024年1期
關鍵詞:方法
李 曦,趙長見,高 峰,王辰琳,黃建友
(中國運載火箭技術研究院,北京,100076)
0 引 言
高速飛行器是大國戰(zhàn)略博弈的重要研究領域,其射程更遠、機動范圍更廣,飛行軌跡靈活多變,故彈道預測難度更大,不易被攔截,被一致認為是實現全球快速打擊的最具潛力飛行器。
以美國、俄羅斯為代表的軍事強國積極開展高速飛行器項目研制,其相關技術已從概念原理探索階段深入至技術開發(fā)階段。美國在20 世紀50—60 年代就啟動了早期戰(zhàn)略機動彈頭研究計劃,20 世紀70—90年代開展再入式高速飛行器研制[1],相關關鍵技術得到快速發(fā)展。進入21世紀后,美國致力于研制高速助推滑翔導彈[2],以實現不同射程的精確打擊。而蘇聯(lián)則于1958 年就開始研制再入式高速助推滑翔飛行器——圖130,兩年后由于技術難度過大被迫中止,20世紀80 年代又通過“4202 項目”重啟了高速滑翔技術驗證,先后研制了Yu-70、71 兩型技術驗證飛行器[3],并在充分驗證高速滑翔機動技術的基礎上成功實現武器化,研制出軸對稱匕首、楔形體外形的先鋒兩型高速滑翔導彈[4]。
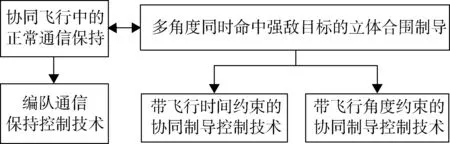
圖1 多高速飛行器協(xié)同關鍵問題與技術Fig.1 Key issues and technologies for collaboration of multiple hypersonic glide vehicles
為應對高速武器威脅,作戰(zhàn)理念、對抗裝備、反導防御系統(tǒng)不斷升級,使得傳統(tǒng)基于單枚飛行器的打擊方案愈加難以實現有效突防。針對這一問題,相關學者提出了多飛行器協(xié)同作戰(zhàn)的概念。多飛行器協(xié)同作戰(zhàn)是指同類或不同類飛行器根據戰(zhàn)術任務要求,通過信息處理、通信交互、智能決策等途徑,進行時空、功能上的協(xié)同。這種信息共享、功能互補、戰(zhàn)術協(xié)同的新型集群策略打破了傳統(tǒng)單飛行器以點擊面的突防劣勢,相比于優(yōu)化單飛行器作戰(zhàn)效能更能滿足未來作戰(zhàn)需求,將成為進攻型武器系統(tǒng)發(fā)展的必然趨勢。
1 多高速飛行器協(xié)同關鍵問題
在高速武器平臺網絡化的背景下,針對多約束下高速飛行器制導方法的研究已經相對成熟完善,目前研究重點主要集中于突破多飛行器協(xié)同制導控制技術難題。近年來,國內外學者已經針對傳統(tǒng)飛行器集群協(xié)同作戰(zhàn)開展了豐富的研究,并積累了一定的成果。但高速、高動態(tài)、高機動性的高速飛行器集群涉及學科門類更廣,協(xié)同作戰(zhàn)實施的難度更大,亟待解決的技術難點多且復雜。
多高速飛行器協(xié)同作戰(zhàn)涉及多項關鍵技術,其中編隊通信保持是實現協(xié)同制導、協(xié)同突防、協(xié)同探測等多項協(xié)同技術的前提與信息支撐,協(xié)同制導控制技術是飛行器編隊高效完成作戰(zhàn)任務的核心與先決條件,在一定程度上制約了高速飛行器的突防優(yōu)勢與整體作戰(zhàn)效能的發(fā)揮,故而本文主要針對高速飛行器集群在協(xié)同飛行中編隊通信保持與協(xié)同制導控制兩大重點問題開展研究。
目前協(xié)同作戰(zhàn)以數據鏈技術結合各類傳感器為基礎,通過構建完整的集群信息化網絡體系,支撐協(xié)同探測、協(xié)同規(guī)劃等協(xié)同技術應用,實現作戰(zhàn)效能與實戰(zhàn)化能力的提升。對于多飛行器協(xié)同飛行,確保飛行器編隊正常通信成為亟須解決的問題之一。對于高速、高動態(tài)、高機動性的高速飛行器編隊通信保持問題,其本質為多約束下的構型保持控制問題,一方面受飛行器載荷限制要考慮動態(tài)飛行過程中的通信距離約束,另一方面由于通信天線波束無法實現完整的三維覆蓋,要考慮飛行器間的通信相對角度約束。
另外多飛行器如何突破多層立體防御體系、實施有效毀傷,是亟須解決的現實問題。其中多角度同時命中強敵目標的立體合圍制導是目前較為有效的作戰(zhàn)樣式。多飛行器立體合圍,一方面需利用不同發(fā)射地點等手段,充分發(fā)揮高速飛行器的高機動性;另一方面需要采用多方向圍捕、多波次配合的協(xié)同飛行方案,來提升整體作戰(zhàn)的突防和打擊效能,最終支撐體系效益的發(fā)揮。對于多飛行器立體合圍,一方面要開展多枚飛行器的協(xié)同角度進入、協(xié)同到達時間的能力研究,另一方面要開展適用于滑翔式飛行器動力學特性的編隊構型保持與制導等關鍵技術的研究。
多高速飛行器在滑翔機動段的編隊通信保持控制以及立體合圍制導兩大問題,涉及的關鍵技術主要分為編隊通信保持控制技術、帶飛行時間約束的協(xié)同制導控制技術以及帶飛行角度約束的協(xié)同制導控制技術,如圖1所示。
2 高速飛行器協(xié)同關鍵技術研究現狀
下面就近年來關于編隊通信保持控制方法、帶飛行時間約束的協(xié)同制導控制方法、帶飛行角度約束的協(xié)同制導控制方法研究成果分別進行介紹。
2.1 編隊通信保持控制
目前有關多飛行器協(xié)同的研究一般是以各飛行器在動態(tài)飛行過程中保持正常通信的前提下開展的。然而在實際協(xié)同作戰(zhàn)過程中,受復雜多變的作戰(zhàn)環(huán)境及不清晰的敵我態(tài)勢等多重因素的影響,飛行器間可能出現通信拓撲切換、通信距離受限及時延等情況,影響整體作戰(zhàn)效能的發(fā)揮。編隊通信保持是實現協(xié)同制導、協(xié)同突防、協(xié)同探測等各類協(xié)同任務的基礎,為其提供大量高更新率的共享信息,因此研究多高速飛行器的通信保持控制具有重要的工程價值。
由于無人機等飛行器機體載荷存在限制,其可攜帶的傳感器的數量及性能有限,從而通信距離存在極值邊界,目前主要通過控制編隊相對位置協(xié)同以保持通信。李建等[5]使用改進的A*算法不斷計算,比較無人機間的距離,建立了存在通信距離約束的多無人機協(xié)同路徑規(guī)劃算法,從而使各無人機始終保持在允許的通信范圍內。鄭重[6]研究了航天器編隊在不同境況下的通信保持控制問題:理想情況下,為保持航天器編隊間正常通信,設計了一種連續(xù)的相對位置協(xié)同控制器,使航天器編隊在跟蹤期望參考軌跡的同時保持編隊隊形不變;在考慮外界干擾與控制輸入受限的情況下,設計了一種魯棒自適應相對位置協(xié)同控制器,同時在此基礎上設計了考慮避碰的自適應隊形協(xié)同控制。劉雅麗等[7]通過分析多水下爬游機器人通信距離、航程等約束,提出了一種帶通信距離約束的異構水下爬游機器人集群任務分配方法。以上方法對多高速飛行器的通信距離控制研究提供了一定啟示。
對于高速、高動態(tài)、高機動性的飛行器集群,電離和黑障等現象對其編隊通信保持存在較大的影響,因此有必要考慮飛行器間通信距離約束;另外考慮到雷達、通信天線以及機體材料結構等約束,使得通信天線的波束指向范圍存在限制且安裝數量與位置有限,從而波束指向范圍無法全方位覆蓋三維空間,存在無法通信的區(qū)域,稱為通信盲區(qū)。因此設計多高速飛行器通信保持控制方案時不僅要考慮編隊相對位置協(xié)同,還需要考慮各飛行器的相對角度協(xié)同,本質上是使得各飛行器滿足時變指向約束。
目前針對高速飛行器集群,同時考慮各飛行器間通信距離與相對角度約束的研究相對較少,可借鑒上述領域中編隊相對位置協(xié)同控制方法與相對角度協(xié)同控制方法的思路,摸索出適合高速飛行器集群通信保持的控制方案。結合相關背景及任務需求,對高速飛行器通信盲區(qū)分布進行簡化建模,通過判斷兩飛行器是否處于通視狀態(tài),設計合理的控制策略以調整飛行器間相對距離與相對角度,最終使得多枚高速飛行器保持實時通信。
2.2 帶飛行時間約束的協(xié)同制導控制
為突破多層立體防御系統(tǒng),實現有效毀傷,可以利用多枚高速飛行器呈多角度、多批次同時攻擊單個目標,形成飽和攻擊作戰(zhàn)樣式,以彌補單飛行器能力缺陷,大幅度提升系統(tǒng)突防概率與作戰(zhàn)效能[8]。這種制導方法被稱為帶飛行時間約束的協(xié)同制導方法。
趙啟倫等[9]率先提出了一種利用多枚導彈協(xié)同攔截高速目標的作戰(zhàn)方案,通過設計相應的“領彈-從彈”式異型導彈協(xié)同制導律證明了常規(guī)導彈協(xié)同對抗高速飛行器的可行性,該協(xié)同制導律在固定及切換拓撲下均能實現協(xié)同攔截指定高速目標。自此啟發(fā)了學界后續(xù)對多高速飛行器的協(xié)同研究,特別是在再入滑翔段的時間協(xié)同研究。
目前針對時間約束下協(xié)同制導的研究成果較多,但大多集中于基于質點運動學模型的多彈協(xié)同問題。而對于欠驅動、強機動的高速飛行器集群,其系統(tǒng)控制能力有限,動力學特性復雜,滑翔約束條件較多,且采用傾斜轉彎(Bank-to-Turn,BTT)控制難以精確控制航向角等狀態(tài)量,故而多彈時間協(xié)同制導方法無法直接應用于高速飛行器的再入時間協(xié)同制導控制。目前關于多高速飛行器時間協(xié)同制導的研究較少,現有文獻一般采用滑翔制導+協(xié)同決策的復合協(xié)同制導方法(如標準軌跡跟蹤法+協(xié)同決策、預測校正法+協(xié)同決策等)或高斯偽譜、凸優(yōu)化等多優(yōu)化方法實現多高速飛行器的時間協(xié)同。梁子璇等[10]基于標準軌跡跟蹤法,在傳統(tǒng)固定式方向偏差走廊的基礎上設計了邊界可調式走廊,通過控制偏差走廊邊界來調整高速飛行器飛行航程,從而間接實現再入時間協(xié)同。2017年,該團隊為量化高速飛行器橫側向機動強弱程度,設計了一種基于機動系數的三維機動軌跡快速規(guī)劃方法[11]。方科等[12]在多邊界方向偏差走廊的基礎上,結合神經網絡算法,對走廊邊界與再入時間的關系進行了擬合,從而通過動態(tài)調節(jié)走廊邊界進行時間控制,但該方法難以獲取再入總時間的可調范圍,從而不易確定合理的協(xié)同再入時間。姜鵬等[13]為實現單枚高速飛行器在時間約束下的快速軌跡規(guī)劃,提出了考慮初始橫向狀態(tài)的邊界可調式方向偏差走廊策略,通過對各飛行器的到達時間進行能力分析,計算出飛行器集群最大、最小到達時間,而后根據作戰(zhàn)任務需求確定協(xié)同時間決策。但基于標準軌跡跟蹤法的時間協(xié)同制導在增大方向角偏差走廊的同時也會帶來一定的終端誤差。Yu[14]與Li[15]兩個團隊基于預測校正法直接迭代調整控制量剖面,以達到控制各飛行器飛行時間的效果,最終實現多高速飛行器的時間協(xié)同。王肖等[16]設計了一種基于高度-速度剖面的分段多項式剖面,通過預測調整多項式參數控制多枚高速飛行器的再入飛行時間。但該方法在求解過程中嚴重依賴準平衡滑翔條件,從而在一定程度上限制了縱向機動;另外,該方法基于大圓弧軌跡預測剩余航程,致使高速飛行器橫側向機動程度同樣有限[17-18],以上兩點均不利于進攻型武器的突防。
基于預測校正法的時間協(xié)同制導通常只能滿足終端位置與時間協(xié)同約束,很難同時滿足終端角度要求,且初值選取較大程度上影響最終迭代解的收斂性。為同時滿足終端角度約束,可采用多優(yōu)化方法將問題離散化后求解。趙江等[19]基于高斯偽譜法實現了多約束下高速飛行器的再入軌跡規(guī)劃,但該方法對初值選取有較高要求,且引入時間約束后會明顯提高優(yōu)化計算難度,難以保證規(guī)劃求解的可行性與快速性。目前有部分學者利用模型預測靜態(tài)規(guī)劃(Model Predictive Statics Programming,MPSP)算法替代了以往文獻中采用的預測校正迭代過程[20]。MPSP算法通過直接求解全時段協(xié)態(tài)矢量對控制變量解進行更新迭代,不必再對非線性動力學模型進行近似化線性處理,故而計算精度高,求解效率快,但該方法仍需預設控制量以獲取初始猜想解,嚴重影響了作戰(zhàn)靈活性與任務適應性。凸優(yōu)化在多項式時間內求解收斂速度快,因此近年來得到廣泛應用。劉哲等[21]基于改進序列凸優(yōu)化算法設計了高速飛行器集群的時間協(xié)同策略,實現了各飛行器再入滑翔時間的精確控制與多飛行器在滑翔段的時間協(xié)同,且該策略適用于不同再入作戰(zhàn)任務。對比基于高斯偽譜法及MPSP算法的數值仿真結果,該方法對初值的依賴程度低,所求再入時間可調范圍與偽譜法得到的仿真結果基本一致,且求解效率更高,規(guī)劃得到的縱向軌跡更平滑。
2.3 帶飛行角度約束的協(xié)同制導控制
帶飛行角度約束的制導問題最早是由Kim 于20 世紀70 年代提出的,又被稱為“攻擊角度控制導引律”。根據不同的控制方法可將其分為基于比例導引的攻擊角度控制導引律、基于最優(yōu)控制理論的攻擊角度控制導引律、基于滑模控制理論的攻擊角度控制導引律、基于模型預測靜態(tài)規(guī)劃的攻擊角度控制導引律以及基于幾何理論的攻擊角度控制導引律等幾類。
基于比例導引的攻擊角度控制導引律主要通過在傳統(tǒng)比例導引律的基礎上附加偏置項來調整其攻擊角度,最終實現飛行器以期望角度命中目標,該方法結構簡單、易于實現,但一般只適用于攻擊靜止或低速目標。最初Kim 等[22]設計了一種偏置項是彈目距離函數的導引律,該導引律雖能實現飛行角度控制,但其效能過分依賴于彈目距離。為改善這一缺陷,Erer等[23]提出了一種基于兩階段控制的偏置比例導引律,該偏置項僅取決于導引初始條件與期望攻擊角度,但此導引律僅適用于攻擊固定目標。隨后該團隊將上述方法改進為同樣適用于攻擊橫縱向無機動運動目標的導引律,但這種基于兩階段控制的偏置比例導引律在模式切換時可能帶來導引指令的跳變。為解決這一問題,Lee等[24]構造了一種將攻擊角度誤差和剩余飛行時間的函數作為時變偏置項的導引律。為進一步消除偏置項對剩余時間的依賴,Kim 等[25]提出了偏置項是攻擊角度誤差的函數的新結構,并按指數衰減的規(guī)律引入導引系統(tǒng)中。
基于最優(yōu)控制理論的攻擊角度控制導引律本質是將帶飛行角度約束的導引問題轉化為最優(yōu)控制問題,其中性能指標一般選用控制總能量的加權函數。該導引律能在某種程度上實現總控制能量最優(yōu),但其推導基于線性化模型,適用范圍有限。目前相關研究主要集中于通過選擇合適的加權函數或導引參數控制飛行器在滿足零脫靶量和零攻擊角度誤差的同時沿期望彈道飛行。王曉芳等[26]基于最優(yōu)控制理論設計狀態(tài)調節(jié)器,提出了一種可以同時控制攻擊角度與攻擊時間的協(xié)同制導方法。
目標的機動對于導引系統(tǒng)而言可視為一種擾動,而滑模控制能有效處理外界擾動對系統(tǒng)的影響,因此當攻擊機動目標時,滑模控制理論是設計相應導引律的最佳選擇。目前基于滑模控制的攻擊角度控制導引律的研究重點在于合理設計滑模面、處理未知的目標加速度以及消除導引指令的奇異現象等[27]。該方法可實現以固定角度精確打擊機動目標,但難以保證導引指令的連續(xù)性。Kumar 等[28]設計了一種能夠同時滿足零脫靶量與飛行角度約束的終端滑模面,且該滑模面可實現視線角速率與視線角誤差的有限時間收斂。但該方法以目標的加速度信息為輸入,滑模變量計算難度較大。為此,Xiong等[29]引入線性擴張狀態(tài)觀測器以實現對目標加速度的實時估計,同時設計了一種新型非奇異終端滑模面。該方法不再依賴于目標加速度信息,同時解決了當滑模變量收斂到零時導引律出現奇異的問題。
模型預測靜態(tài)規(guī)劃是一種結合預測控制思想與近似動態(tài)規(guī)劃的控制理論,可用于處理有限時間域內的帶終端約束的非線性控制問題[30],其出眾的計算效率使其成為解決航天領域中短周期控制問題的關鍵方法。帶飛行角度約束的導引問題本質為有限時間域內的帶終端約束的非線性控制問題,故而該方法能夠有效處理帶飛行角度約束的三維導引問題,但其基礎原理為模型線性化后的最優(yōu)控制,可達角度范圍有限。國海峰等[31]成功改進模型預測靜態(tài)規(guī)劃算法,并應用于高速飛行器制導問題。
基于幾何理論的攻擊角度控制導引律主要通過分析導引過程中彈目相對幾何關系,基于某種幾何原理獲得滿足固定攻擊角度約束的彈道,進而針對導引方程設計出相應的控制律。該導引律所需信息相對較少,但一般只適用于靜止目標,且很難考慮到如能量最優(yōu)等性能指標。Manchester 等[32]基于幾何原理設計了一種圓弧導引律,可實現導彈沿圓弧運動并以指定角度精確打擊目標。以上帶飛行角度約束的制導方法均為多高速飛行器協(xié)同攻擊強敵目標提供探索思路[33]。
3 總結與展望
高速飛行器涉及總體設計、結構材料、熱防護、導航、制導與控制等多項關鍵技術,具有巨大的軍事潛在價值,逐步成為航空航天領域研究的熱點。本文分析了多高速飛行器在滑翔機動段的編隊通信保持控制與立體合圍制導兩大問題以及其中涉及的關鍵技術,介紹了編隊通信保持控制方法、帶飛行時間約束的協(xié)同制導控制方法以及帶飛行角度約束的協(xié)同制導控制方法的研究成果。目前,多高速飛行器編隊通信保持控制方法以及集群協(xié)同制導控制方法的研究尚處于理論階段,隨著一些新興控制方法以及智能算法的發(fā)展,未來的主要研究發(fā)展方向有以下趨勢:
a)基于強化學習的多約束下編隊通信保持控制。
多高速飛行器編隊通信保持問題本質為狀態(tài)約束受限的控制問題,約束要求為系統(tǒng)狀態(tài)不能超過預設的邊界,即不能超過彈間通信距離閾值,且位于可通視姿態(tài)角度區(qū)間內。故而可以將其簡化為狀態(tài)受限控制問題進行求解,為高速飛行器的編隊通信保持控制提供探索思路。另外在多高速飛行器協(xié)同作戰(zhàn)過程中,作戰(zhàn)環(huán)境的復雜性以及敵方防御系統(tǒng)的多層立體化對飛行器間的通信同樣具有較大的影響。而強化學習能夠較好地適應未知環(huán)境,且在與環(huán)境的反復交互過程中可通過學習策略不斷優(yōu)化系統(tǒng)性能,從而使得指定性能指標在一定程度上達到最優(yōu)。故而該方法可較好適應復雜作戰(zhàn)環(huán)境下的多高速飛行器編隊通信保持控制問題。因此,基于強化學習的狀態(tài)約束條件下的編隊通信保持控制是未來應用研究的重要方向。
b)基于深度學習的多約束下在線三維軌跡規(guī)劃。
高速飛行器集群在執(zhí)行戰(zhàn)術任務時會受到地貌環(huán)境、天氣變化以及敏感地帶等多重因素的影響。同時其獨特的動力學特性、橫側向強機動性以及多飛行器間的通信距離約束與通信角度約束也是影響三維軌跡規(guī)劃的重要因素。深度學習是實現人工智能的重要途徑之一,它通過組合“低層”特征形成更抽象的“高層”特征,以發(fā)現數據的分布式特征表示,從而用簡單模型解決高難問題,因此在多約束條件下,深度學習可用來實現在線三維軌跡規(guī)劃[34],是未來多高速飛行器協(xié)同作戰(zhàn)技術的關鍵研究方向之一。
未來,隨著飛行器集群不斷智能化、自主化,高速飛行器協(xié)同作戰(zhàn)將不只局限于理論研究,而是逐漸具備實戰(zhàn)化的集群作戰(zhàn)能力,屆時將成為未來的主要作戰(zhàn)手段。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
