基于粒子群算法的數(shù)字控制伺服系統(tǒng)離線參數(shù)自尋優(yōu)方法研究
2024-03-05 08:29:58楊弘棖許文波李沛文
導(dǎo)彈與航天運(yùn)載技術(shù) 2024年1期
關(guān)鍵詞:調(diào)試
楊弘棖,劉 山,許文波,張 博,李沛文
(北京精密機(jī)電控制設(shè)備研究所,北京,100076)
0 引 言
目前,航天伺服領(lǐng)域已經(jīng)廣泛采用了數(shù)字控制器和數(shù)字控制算法,為提高伺服系統(tǒng)性能提供了便利的手段。當(dāng)前大多采用以傳遞函數(shù)為基礎(chǔ)的經(jīng)典控制理論對系統(tǒng)性能進(jìn)行設(shè)計(jì)和校正。其中,機(jī)電伺服系統(tǒng)產(chǎn)品由于采用全數(shù)字控制,特性較為一致,控制參數(shù)在經(jīng)過設(shè)計(jì)階段調(diào)試后一般可固化在控制算法中,生產(chǎn)過程中不需要更改。而電液伺服系統(tǒng)使用的伺服閥受到機(jī)加尺寸、裝配等環(huán)節(jié)影響,導(dǎo)致合格產(chǎn)品的靜、動態(tài)特性存在一定散布,有時需要對軟件中的控制參數(shù)進(jìn)行調(diào)整,保證系統(tǒng)性能滿足控制系統(tǒng)任務(wù)書指標(biāo)要求。
粒子群算法是由Kennedy 和Eberhart 等于1995 年提出的一種演化計(jì)算算法[1-2],該方法對初值選取具有一定的魯棒性,收斂速度快,全局收斂性較好,是一種適用于工程應(yīng)用的參數(shù)尋優(yōu)方法[3]。目前粒子群算法已廣泛應(yīng)用于函數(shù)優(yōu)化、神經(jīng)網(wǎng)絡(luò)訓(xùn)練和模糊系統(tǒng)控制等領(lǐng)域。本文將其應(yīng)用于數(shù)字伺服系統(tǒng)控制參數(shù)的離線尋優(yōu),開展了相關(guān)理論分析和仿真研究。
1 推力矢量控制伺服系統(tǒng)特性校正原理
某電液伺服系統(tǒng)的控制原理如圖1所示,使用PⅠ控制方法,結(jié)合濾波環(huán)節(jié)進(jìn)行頻率特性幅值和相位的調(diào)整,其中有多項(xiàng)控制參數(shù)需要進(jìn)行整定。
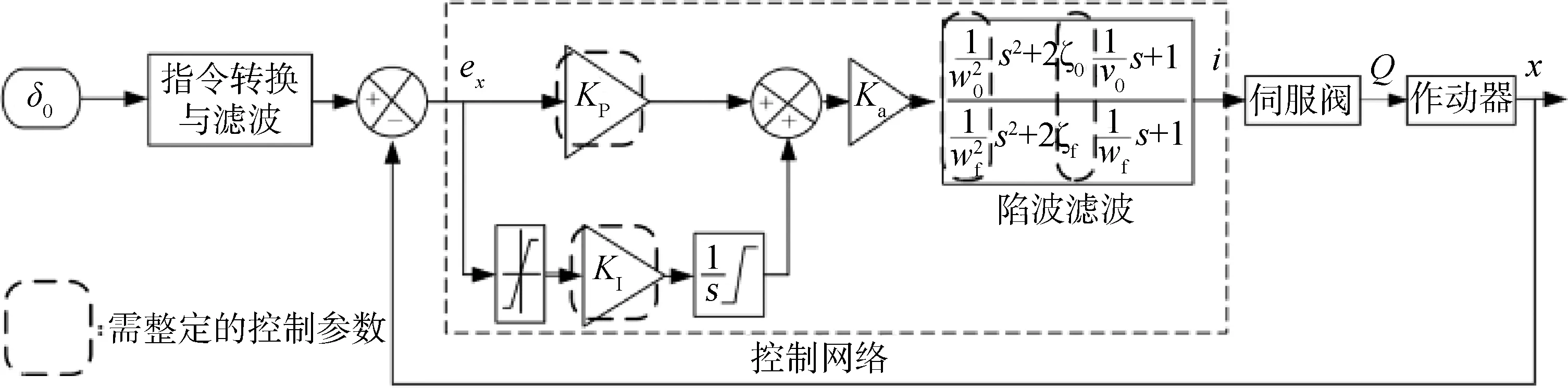
圖1 電液伺服系統(tǒng)控制原理Fig.1 Control principle of electro-hydraulic servo system
由于伺服閥的靜、動態(tài)特性存在一定散布,為補(bǔ)償伺服閥的性能差異,確保電液伺服系統(tǒng)的頻率特性在滿足任務(wù)書指標(biāo)要求的同時具有一定余量,通常由設(shè)計(jì)人員手動調(diào)試數(shù)字控制器內(nèi)的相關(guān)參數(shù),不適用于后續(xù)大批量生產(chǎn),因此,需要對伺服系統(tǒng)控制參數(shù)自整定方法進(jìn)行研究,提高調(diào)試速度和產(chǎn)品合格率。
2 粒子群算法
粒子群算法通過模擬鳥群覓食過程中的遷徙和聚集,產(chǎn)生不可預(yù)測的群體搜索行為。在優(yōu)化之前首先執(zhí)行初始化:在給定的解空間內(nèi)對粒子群賦予一組隨機(jī)值。給定的解空間決定了優(yōu)化的速度,對粒子群進(jìn)行隨機(jī)賦值的目的是在全局范圍內(nèi)搜尋目標(biāo)問題的最優(yōu)解,確保了最優(yōu)解的求解精度。個體粒子有了初始值等其他屬性后,將其代入優(yōu)化目標(biāo)函數(shù)進(jìn)行適應(yīng)度的計(jì)算。然后通過迭代尋優(yōu)。迭代過程即持續(xù)更新與尋優(yōu)的過程。在每一次迭代中,每個粒子通過跟蹤個體最優(yōu)值Pbest(個體粒子本身在迭代過程中找尋到的最優(yōu)解粒子)和全局最優(yōu)值Gbest(種群中所有的粒子們在迭代過程中所找尋到的最優(yōu)解)來更新自己在解空間內(nèi)的位置與飛行速度。
與人工控制參數(shù)整定方法相比,將粒子群算法用于伺服系統(tǒng)控制器參數(shù)自整定主要有以下優(yōu)點(diǎn):a)可同時對多項(xiàng)控制參數(shù)整定,比人工逐個調(diào)試各項(xiàng)參數(shù)的方法效率更高;b)可對大量控制參數(shù)自動進(jìn)行計(jì)算,尋優(yōu)范圍更廣,優(yōu)化度更高;c)可根據(jù)實(shí)際需求自主設(shè)計(jì)算法的目標(biāo)函數(shù);d)可在指定范圍內(nèi)進(jìn)行參數(shù)尋優(yōu),使整定結(jié)果能夠保證系統(tǒng)的穩(wěn)定性。
3 基于粒子群算法的伺服系統(tǒng)離線參數(shù)自尋優(yōu)方法
本節(jié)結(jié)合電液伺服系統(tǒng)調(diào)試過程,分別確定粒子群算法的適應(yīng)度函數(shù)、粒子編碼方式、參數(shù)搜索空間、粒子學(xué)習(xí)速度和算法規(guī)模,設(shè)計(jì)了一種基于粒子群算法的電液伺服系統(tǒng)離線參數(shù)自尋優(yōu)方法。
3.1 適應(yīng)度函數(shù)的設(shè)計(jì)
首先,根據(jù)控制系統(tǒng)任務(wù)書和人工調(diào)試結(jié)果確定尋優(yōu)目標(biāo)特性,即適應(yīng)度函數(shù)。
對于同一伺服作動器,如果忽略泄露對其性能的影響,可以認(rèn)為從伺服閥流量到作動器位移的傳遞特性GxQ不變,因此影響伺服系統(tǒng)性能的主要因素為控制偏差e到伺服閥流量Q的傳遞特性GQe。若能得到比較一致的傳遞特性GQe,即可保證伺服系統(tǒng)總體性能的一致性。由于伺服閥流量特性難以通過測量獲取,因此將傳遞特性GQe按照式(1)進(jìn)行計(jì)算:
式中N為控制網(wǎng)絡(luò)的傳遞特性;Gxδ為指令信號到線位移的傳遞特性;Giδ為閥電流到線位移的傳遞特性。Gxδ和Giδ均可通過對測試數(shù)據(jù)進(jìn)行分析獲得。
為得到穩(wěn)定一致的GQe,則需Gxδ/GiδN在不同性能伺服閥條件下能夠保持一致。而對于固定的伺服閥和作動器,閥電流到作動器輸出線位移的傳遞特性通常保持不變,即Gxδ/Giδ頻率特性不變,且可通過對測試數(shù)據(jù)進(jìn)行分析獲得。因此可以結(jié)合Gxδ/Giδ測試特性,計(jì)算得到需要的目標(biāo)網(wǎng)絡(luò)特性N?,使Gxδ/GiδN特性保持一致。
使用粒子群算法對電液伺服系統(tǒng)進(jìn)行整定時,需要建立單一的、能反映控制系統(tǒng)綜合性能的指標(biāo)。本文以人工調(diào)試完成、性能較好的伺服系統(tǒng)的Gxδ/GiδN特性作為整定目標(biāo)。參數(shù)尋優(yōu)前,首先進(jìn)行一次初測,得到待調(diào)試系統(tǒng)的閥電流到作動器輸出線位移的Gxδ/Giδ頻率特性,然后可通過計(jì)算解得所需要的控制網(wǎng)絡(luò)目標(biāo)特性N?,將其作為適應(yīng)度的計(jì)算準(zhǔn)則。
粒子適應(yīng)度的計(jì)算方法為:粒子當(dāng)前位置值對應(yīng)一組控制參數(shù),計(jì)算按照該組控制參數(shù)設(shè)置的控制網(wǎng)絡(luò)頻率特性與目標(biāo)網(wǎng)絡(luò)特性N?在各測試頻率點(diǎn)幅值特性的方差并求和取倒數(shù)。
適應(yīng)度F的計(jì)算公式為
式中M0(ωi)為控制網(wǎng)絡(luò)目標(biāo)頻率特性在第i個頻率點(diǎn)的幅值;P0(ωi)為控制網(wǎng)絡(luò)目標(biāo)頻率特性在第i個頻率點(diǎn)的相位,共有m個頻率點(diǎn);MN(ωi)為待評估的粒子位置代表的控制參數(shù)代入控制網(wǎng)絡(luò)時在相應(yīng)頻率點(diǎn)的幅值;PN(ωi)為待評估的粒子位置代表的控制參數(shù)代入控制網(wǎng)絡(luò)時在相應(yīng)頻率點(diǎn)的相位;ηM為幅值權(quán)值;ηP為相位權(quán)值。用粒子適應(yīng)度描述粒子位置值對應(yīng)的控制參數(shù)與能達(dá)到目標(biāo)特性控制參數(shù)的接近程度,可以用該指標(biāo)反映控制系統(tǒng)綜合性能。
3.2 粒子編碼方式和參數(shù)搜索空間
根據(jù)控制器可裝訂參數(shù)確定粒子編碼方式和參數(shù)搜索空間。伺服系統(tǒng)需要整定的控制參數(shù)包括控制器位置增益KP、積分增益KⅠ、陷波頻率w0、濾波器wf、濾波器阻尼ξ0及ξf,因此將粒子的解空間維數(shù)設(shè)為六維,位置編碼方式定義為[KP,KⅠ,w0,wf,ξ0,ξf]。為保證參數(shù)整定結(jié)果的穩(wěn)定性,需要使粒子群在規(guī)定的控制參數(shù)范圍內(nèi)進(jìn)行整定。基于伺服系統(tǒng)穩(wěn)定性分析結(jié)果和批產(chǎn)工藝數(shù)據(jù)包絡(luò),確定參數(shù)尋優(yōu)范圍為[0.7,1;0.2,0.25;100,200;0.01,1;100,200;0.01,1]。這是對電液伺服系統(tǒng)進(jìn)行多次調(diào)試后總結(jié)出的控制參數(shù)范圍,并適當(dāng)進(jìn)行擴(kuò)大,嘗試找到比歷史經(jīng)驗(yàn)更優(yōu)的控制參數(shù)組合。
3.3 控制參數(shù)自整定方法
基于粒子群算法的電液伺服系統(tǒng)控制參數(shù)自整定具體步驟如下:
a)初始化粒子群信息。首先設(shè)置種群個數(shù)為200,迭代次數(shù)為100,慣性權(quán)重w為0.8,自我學(xué)習(xí)速度c1為0.5,群體學(xué)習(xí)速度c2為0.5。隨機(jī)產(chǎn)生各粒子的初始位置。
b)個體粒子有了初始位置后,計(jì)算每個粒子的適應(yīng)度,適應(yīng)度F按照式(2)進(jìn)行計(jì)算。
c)分別記錄每個粒子的適應(yīng)度,記錄每個粒子個體的歷史最佳位置xm和歷史最佳適應(yīng)度fxm,并更新群體最佳位置ym和群體最佳適應(yīng)度fym。
d)更新每個粒子的速度,其中,每個粒子速度的方向?qū)⒊鴤€體最優(yōu)值和群體最優(yōu)值的方向進(jìn)行跟蹤,體現(xiàn)了粒子群算法的進(jìn)化屬性,使得粒子群整體朝著全局最優(yōu)點(diǎn)逐漸運(yùn)動。粒子的速度更新公式為
式中 rand1,rand2為0~1之間的隨機(jī)值。
位置更新公式為
e)根據(jù)粒子更新后的位置,重復(fù)步驟b,計(jì)算新位置的適應(yīng)度,并更新個體的歷史最佳位置xm、歷史最佳適應(yīng)度fxm、群體最佳位置ym和群體最佳適應(yīng)度fym。
f)達(dá)到最大迭代次數(shù)時,或多次運(yùn)算后群體最佳適應(yīng)度保持不變,或在搜尋到滿足要求的最佳位置時,終止計(jì)算。
基于粒子群算法的伺服系統(tǒng)控制參數(shù)自整定方法流程如圖2所示。
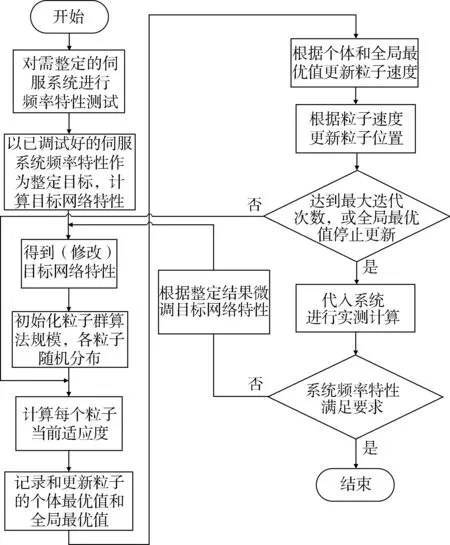
圖2 基于粒子群算法的伺服系統(tǒng)控制參數(shù)自整定流程Fig.2 Self-tuning process of servo system control parameters based on particle swarm optimization algorithm
4 整定實(shí)例
使用上述方法,對某電液伺服系統(tǒng)的一套伺服作動器進(jìn)行參數(shù)自整定。
根據(jù)對該伺服作動器實(shí)測數(shù)據(jù)的分析,計(jì)算得到所需的控制網(wǎng)絡(luò)目標(biāo)特性如圖3所示。
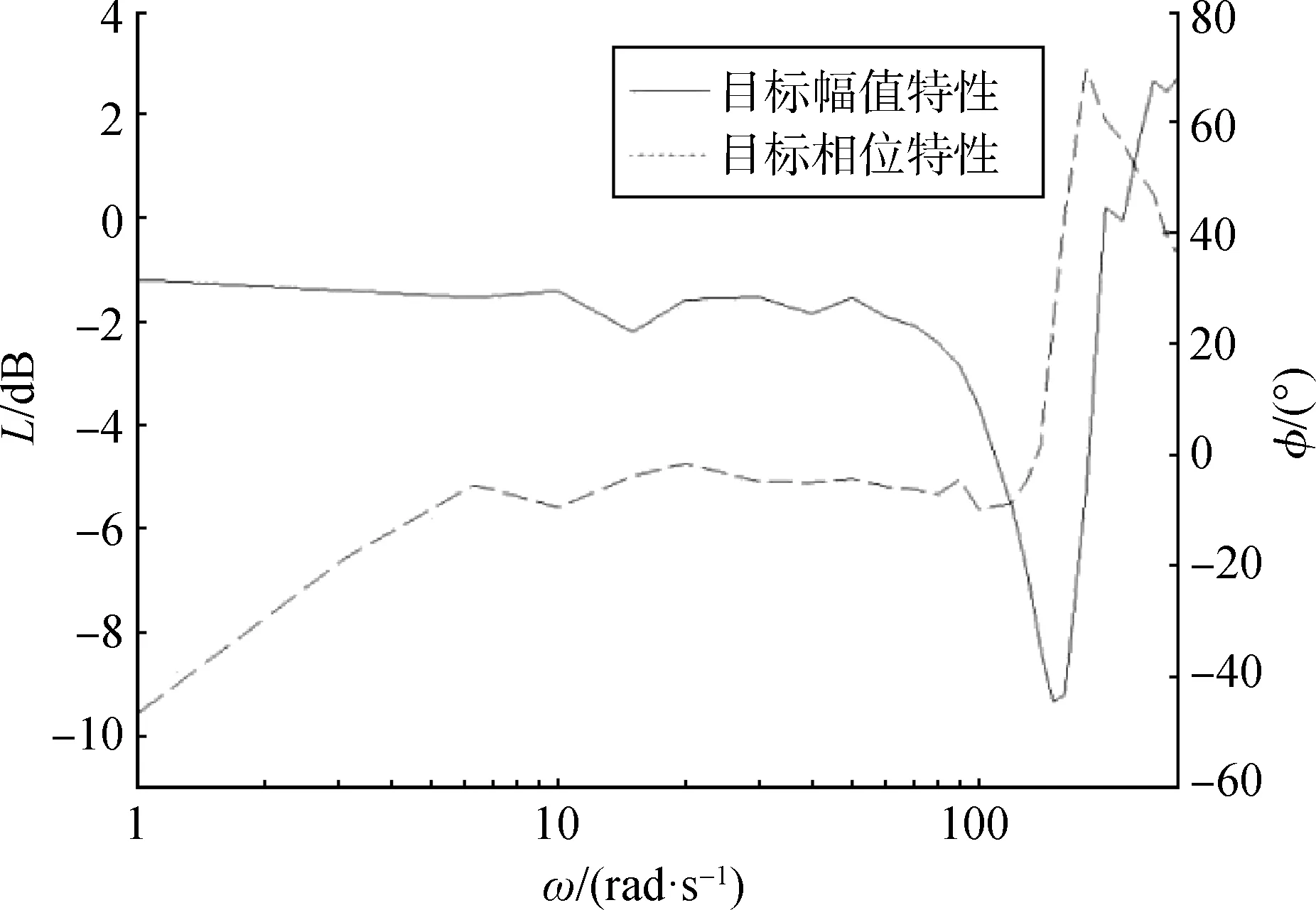
圖3 控制網(wǎng)絡(luò)目標(biāo)特性Fig.3 Target characteristics of control network
運(yùn)行粒子群算法,并改變運(yùn)算規(guī)模進(jìn)行多次仿真驗(yàn)證,參數(shù)自整定結(jié)果如表1所示。
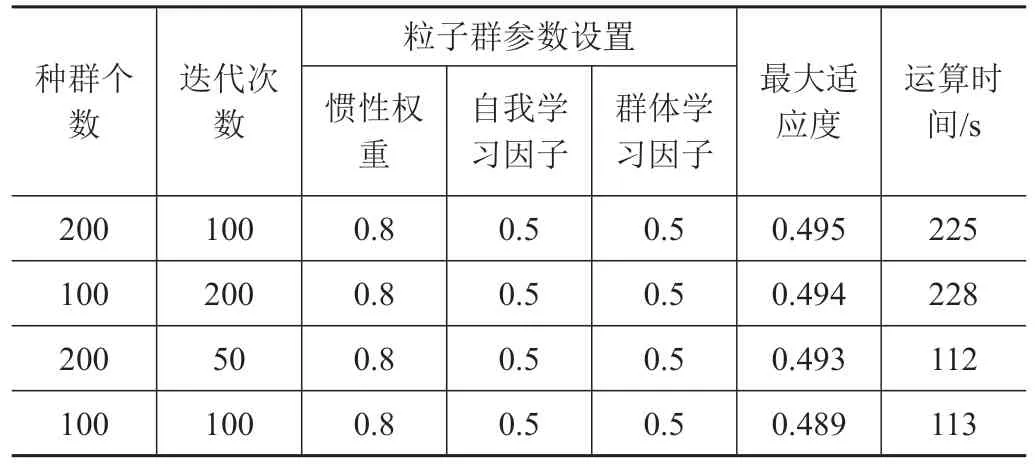
表1 粒子群算法參數(shù)自整定結(jié)果Tab.1 Parameter self tuning results of particle swarm optimization
由表1可知,基于粒子群算法的控制參數(shù)自整定方法可以在225 s 左右找到全局最優(yōu)值。多次計(jì)算結(jié)果接近,證明該方法對初值選取具有一定的魯棒性,全局收斂性較好;且減小運(yùn)算規(guī)模后,運(yùn)算112 s 即已接近全局最優(yōu)值,算法收斂較快。
適應(yīng)度最大時的最優(yōu)控制參數(shù)組合為KP=0.849,KⅠ=0.2,w0=158.047,ζ0=0.120,wf=194.413,ζf=0.311。
將粒子群算法求得的最優(yōu)參數(shù)組合作為控制網(wǎng)絡(luò)的各項(xiàng)參數(shù),控制網(wǎng)絡(luò)的頻率特性和目標(biāo)網(wǎng)絡(luò)特性對比如圖4所示。
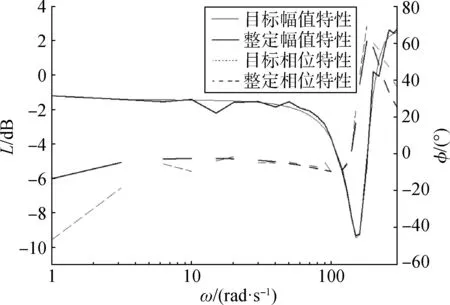
圖4 控制網(wǎng)絡(luò)的頻率特性和目標(biāo)特性對比Fig.4 Comparison of frequency characteristics and target characteristics of control network
整定后伺服系統(tǒng)的閉環(huán)頻率特性如圖5所示。
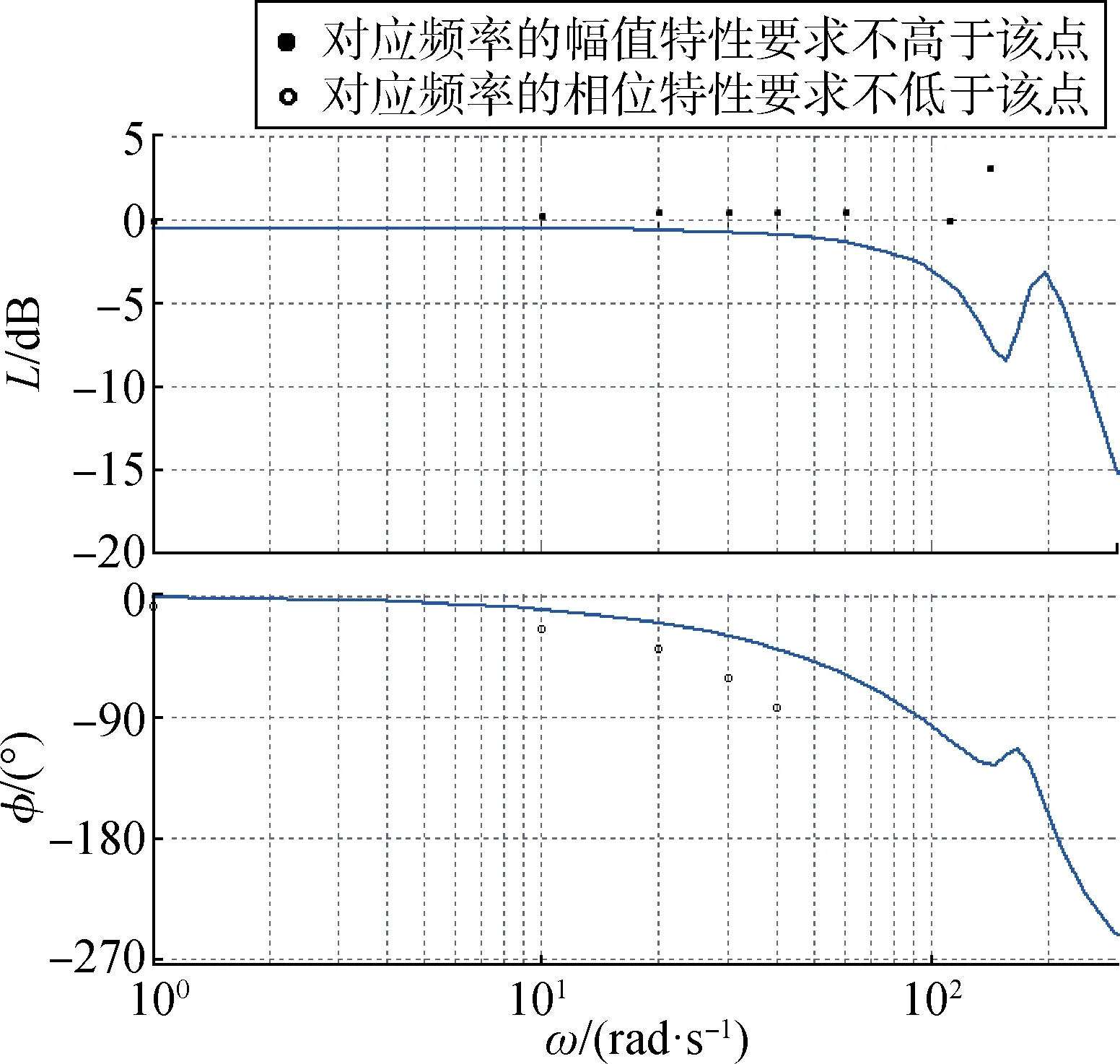
圖5 自整定后伺服系統(tǒng)的閉環(huán)頻率特性Fig.5 Closed loop frequency characteristics of servo system after self-tuning
由圖5可以看出,由粒子群算法整定后伺服系統(tǒng)的閉環(huán)頻率特性能夠滿足任務(wù)書要求,且余量充足。因此,通過基于粒子群算法的伺服系統(tǒng)控制參數(shù)自整定方法整定得到的控制參數(shù)組合可以對伺服閥的差異進(jìn)行補(bǔ)償,使伺服閥性能具有差異的伺服系統(tǒng)傳遞特性GQe保持不變,在伺服閥小信號流量特性發(fā)生一定散布的情況下,保證伺服系統(tǒng)性能滿足任務(wù)書指標(biāo)要求。
5 結(jié)束語
根據(jù)以上研究可知,將粒子群算法應(yīng)用于對某電液伺服系統(tǒng)的控制參數(shù)自整定,可以實(shí)現(xiàn)數(shù)字伺服系統(tǒng)控制參數(shù)離線尋優(yōu)的自動化。同時,使用粒子群算法得到的控制網(wǎng)絡(luò)頻率特性與能夠補(bǔ)償伺服閥特性散布的目標(biāo)特性非常接近。仿真結(jié)果表明,該參數(shù)自尋優(yōu)方法能同時對多項(xiàng)控制參數(shù)尋優(yōu),可大量節(jié)省人工調(diào)試時間,優(yōu)化人工整定的繁瑣過程,具有更高的調(diào)試效率,能夠在保證系統(tǒng)穩(wěn)定性的同時在更廣范圍內(nèi)找到最符合實(shí)際需求的控制參數(shù)。
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(shè)(2018年1期)2018-07-10 09:49:50
制造技術(shù)與機(jī)床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當(dāng)代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(shè)(2015年5期)2015-12-01 04:17:19
電子設(shè)計(jì)工程(2015年3期)2015-02-27 12:04:00
