三枕搗固作業過程中道砟細觀運動及能量演變分析
2024-04-11 03:44:52張智海崔旭浩劉光鵬
工程力學 2024年4期
張智海,肖 宏,崔旭浩,劉光鵬
(1.北京交通大學土木建筑工程學院,北京 100044;2.北京交通大學軌道工程北京市重點實驗室,北京 100044)
在長期自然環境影響及高速列車動荷載作用下散體道床易發生道砟磨耗、破碎,改變道床級配和道砟的工作性能,使道床產生不均勻沉降,改變線路幾何形位,降低線路平順性,影響列車運營品質[1-3]。為保持線路的平順性和安全性,需不斷的進行養護維修作業[4-5]。目前,采用大型搗固車對線路進行定期或不定期的維修作業(簡稱大機搗固)已成為消除有砟軌道不平順病害的有效手段[6]。但大型搗固作業車種類繁多、參數及作業工序多樣,現場搗固作業質量難以控制。不合理的大機搗固作業方式不僅不能達到整正線路幾何形位、提高道床密實程度的目的,還會造成道床越搗越松、道砟顆粒破碎等負面影響,降低散體道床的服役壽命,增加工務養護維護成本[7-8]。因此,為探明有砟道床搗固密實機理,提高搗固作業質量,需開展大機搗固作業對有砟道床的作用效應影響研究,從細觀角度揭示搗固作業過程中道砟顆粒運動力學機制。
近年來,諸多學者主要利用物理試驗和數值模擬兩種手段來研究大機搗固作業對有砟道床宏細觀力學特性的影響。在物理試驗研究方面,LIU等[9]、王衛東等[10]和KOC 等[11]開展了現場單枕、雙枕搗固作業前后道床縱橫向阻力試驗,分析了搗固作業次數與道床縱橫向阻力間的內在聯系,驗證了利用搗固車來測量道床縱橫向阻力的可靠性,研究結果表明:道床阻力隨著搗固次數的增加,呈先增大后減小的變化趨勢。KUMARA等[12]和MCDOWELL 等[13]借助室內縮尺試驗平臺,研究了不同臟污狀態道砟試樣在搗固作業后的沉降特性,結果表明:臟污道床搗固作業計劃與臟污率密切相關。AINGARAN 等[14]和PADERNO 等[15]借助室內試驗來模擬搗固作業過程中枕下道砟的受力,分析了搗固作業對道床劣化及長期服役性能的影響。PRZYBY?OWICZ 等[16]通過室內試驗,探究了垂直搗固法和側向搗固法的差異性,結果表明:側向搗固法更有利于提高枕端道砟密實度。綜合分析可知,以上試驗研究主要以室內試驗為主,缺乏大量現場試驗研究。僅有的現場試驗主要關注搗固作業對道床阻力特性的影響,未從細觀角度揭示搗鎬與道砟之間相互作用機制,且現場試驗對象為單枕、雙枕搗固作業車,并未涉及三枕搗固作業車。與單枕、雙枕搗固作業相比,三枕搗固作業擾動范圍更大,道床部分區域振動強度更高,對道床的宏細觀力學狀態影響更為顯著,因此現有的單枕、雙枕搗固作業的研究無法反映三枕搗固車對有砟道床的作用效應。
在數值模擬方面,SHI 等[17]建立了較為精細的雙枕搗固裝置-有砟道床耦合分析模型,分析了搗固作業參數對道床力學行為的影響,但該模型在模擬搗鎬運動時并未考慮道砟對搗鎬的非線性阻力特性。SAUSSINE 等[18]和ZHOU 等[19]利用離散單元法建立了道砟箱局部搗固作業模型,探究了搗固作業參數與道床密實度間的內在聯系,研究結果表明:夾持力和搗鎬振動頻率對搗固作業后道床密實度影響較大。WANG 等[20]建立了小型搗固設備與有砟道床耦合仿真模型,分析了道砟在搗固作業過程中的振動響應特性。由以上數值仿真研究可知,搗固作業仿真模型局限于雙枕及小型搗固設備,并未涉及DWL-48 型搗固穩定車的三枕搗固裝置(09-3X)-有砟道床耦合分析模型。由此可見,目前針對有砟道床搗固作業的機理研究尚落后于大型搗固養維修設備在工程實際中的應用,尤其是在高效率、高質量的三枕搗固作業方面,鮮有相關文獻報道。此外,模擬研究主要針對搗固作業參數,并未從細觀角度探究搗固作業過程中道砟的細觀運動特征,無法從本質上揭示搗固密實工作原理及力學機制。
針對上述研究中的不足之處,本文結合DWL-48連續走行搗固穩定車三枕搗固裝置的實際動態作業過程,率先建立了三枕搗固裝置-軌排-有砟道床多層多介質、多尺度精細化耦合仿真模型,分析了三枕搗固作業過程中道砟顆粒移動、旋轉及能量演變規律。從細觀角度揭示了搗固作業過程中搗鎬與道砟間相互作用,探明了搗固作業過程中道砟顆粒的運動形式及密實過程,加深了對三枕搗固作業過程中道砟細觀運動特征的認識,為進一步研究大型搗固機械作業機理和參數優化奠定了理論基礎。
1 數值仿真模型建立
1.1 道砟顆粒模擬及散體道床建模
鐵路碎石道砟形態萬千,粒徑大小各不相同,且各向異性顯著[21],對于道砟顆粒形態的精確模擬及表征是實現大型搗固車搗鎬與道砟細觀相互作用精細化建模的關鍵。為真實表征道砟顆粒的形態學特征,本文利用三維激光掃描儀獲取了真實道砟三維輪廓.stl 文件[22-24],并將其導入到EDEM 軟件中作為道砟顆粒簇單元中組合球的填充邊界,如圖1 所示。綜合考慮離散元模型的生成速度及計算效率,將導入EDEM 中的道砟顆粒樣本分為兩類,采用縮減部分道砟顆粒樣本組合球數目及占比的方法,減少了道床模型總的球單元數目,縮短了接觸判斷的時間,提高了模擬計算效率。本文采用的道砟顆粒模板,如圖2 所示。
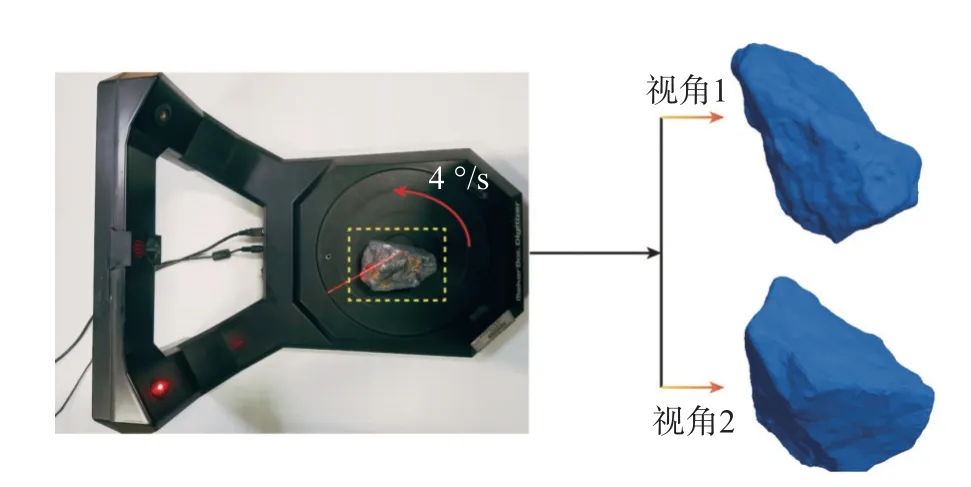
圖1 道砟顆粒輪廓掃描過程Fig.1 Scanning process of ballast particle profile

圖2 道砟顆粒模板Fig.2 Ballast particle templates
由圖2 可知,主要道砟顆粒模板選擇了5 種不同的道砟顆粒形態,組合球數目介于10~14,顆粒占比分別為20%、15%、15%、20%和15%,而另一種道砟顆粒模板中組合球數目介于35~50,顆粒占比控制在15%,并且每種道砟顆粒樣本均按照圖3 的特級道砟顆粒級配來生成不同形態的道砟顆粒。本文生成的道砟顆粒未考慮破碎特征,也未限定顆粒生成的角度或方向,采用顆粒在自重作用下隨機堆積的方式構建了散體道床離散元模型,如圖4 所示。圖4 中道床厚度為350 mm,砟肩堆高為150 mm,砟肩寬度為500 mm,道床頂面寬度為3600 mm;模型中III 型混凝土軌枕采用幾何體單元進行模擬,長度為2600 mm,軌下截面寬度為320 mm,間距為600 mm。值得注意的是,生成搗固作業前道床模型時,采用分層壓實的方式,使道床密度達到1780 kg/m3,符合《高速鐵路設計規范》[25]的要求。一般情況下,由于道床密實度受搗鎬振動夾持作用影響較大,搗固作業后的道床密實度會降低。

圖3 特級道砟顆粒級配Fig.3 Ballast particle gradation

圖4 散體道床離散元模型Fig.4 Discrete element model of ballast bed
1.2 三枕搗固裝置-軌排-有砟道床耦合模型
DWL-48 連續式搗固穩定車(簡稱DWL-48 搗穩車)是由搗固車和穩定車兩部分構成,是一種結構先進的自行式、多功能線路維修機械。由于其搗固穩定作業過程復雜,結構功能多樣,本文僅研究搗固車作業對道床力學狀態的影響,如圖5所示。圖5 展示了DWL-48 搗穩車的搗固車的部分機構及三枕搗固裝置(09-3X)。

圖5 DWL-48 搗穩車搗固裝置Fig.5 DWL-48 tamping and stabilizing machine
為精確模擬三枕搗固作業裝置,先根據表1的搗鎬鎬掌基本幾何參數,在solidworks 三維建模軟件中繪制了搗固鎬的全鎬和半鎬幾何模型,如圖6(a)所示。然后,在北京大型養路機械運用檢修段實測了三枕搗固裝置外鎬臂、內鎬臂和第三鎬臂的幾何尺寸,繪制了其幾何模型,并與圖6(a)的全鎬和半鎬模型進行裝配,生成了三枕搗固裝置幾何模型,如圖6(b)所示。根據《高速鐵路設計規范》[25]的相關尺寸要求,在三維建模軟件中繪制了鋼軌(60 kg/m)和III 型混凝土軌枕的幾何模型,如圖6 所示。最后,將三枕搗固裝置模型(圖6(b))和軌排模型(圖6(c))的.step 文件導入多體動力學軟件RecurDyn 中,生成了三枕搗固裝置-軌排-有砟道床精細化耦合仿真模型,如圖6(d)所示。需要注意的是仿真模型中鋼軌和軌枕之間并未考慮扣件系統,采用固定約束進行了連接,這是由于在搗固作業過程中主要關注軌下搗固區域的力學狀態變化,扣件系統對搗固作業效果影響較小。

表1 三枕搗固裝置搗固鎬鎬掌基本幾何參數Table 1 Geometric parameters of tamp tine for three-sleeper tamping machine

圖6 三枕搗固裝置-軌排-有砟道床耦合模型生成過程Fig.6 Generation process of three-sleeper tamping machinetrack panel-ballast bed coupling model
三枕搗固裝置-軌排-有砟道床精細化耦合仿真模型中道砟-道砟接觸、道砟-軌枕接觸、道砟-搗鎬接觸均采用Hertz-Mindlin(No Slip)本構模型,其中法向接觸力分量基于Hertzian 接觸理論[26],切向力模型基于Middlin-Deresiewicz 的研究工作[27],滾動摩擦力通過接觸獨立定向恒轉矩模型實現[28]。在數值模型中,鋼軌與道砟顆粒不直接接觸,參考文獻[29 - 31]將彈性模量取為2.07×105,密度取為7860 kg/m3,泊松比取為0.3;搗鎬、軌枕與道砟顆粒直接接觸,為保證接觸參數的可靠性,參考文獻[17],將搗鎬的彈性模量設為2.07×105MPa,密度設為7900 kg/m3,泊松比設為0.29,軌枕的彈性模量設為3.1×104,泊松比設為0.2,密度設為2240 kg/m3。根據文獻[17,32 - 34]中的道砟顆粒材料屬性及接觸參數,通過控制變量法,結合2.2 節搗固作業前后道床橫向阻力試驗結果,擬定了仿真模型的計算參數,如表2 所示。

表2 仿真模型接觸參數Table 2 Contact parameters of simulation model
考慮到多體動力學與離散元雙向耦合計算的穩定性,在數值模型計算時,將計算時步設為Rayleigh 時間步的10%左右,借助GPU 進行加速計算,將一次模型的計算時間控制在8 天以內。
2 搗鎬運動施加及模型驗證
2.1 三枕搗固裝置搗鎬運動設置
一個完整的三枕搗固作業過程,包括起道、搗入、夾持、撤鎬回轉及提升4 個基本作業階段,如圖7 所示。為精確模擬現場實際搗固作業過程中搗鎬的運動情況,結合現場養護維修作業中的常用搗固作業參數[10,17],在搗固作業前將起道量設為30 mm,搗固深度設為386 mm。在圖7(a)起道階段,將作業時間設為0.1s,軌排向上運動的速度設為300 mm/s,各鎬尖振幅調整為10 mm,激振頻率設為35 Hz。在圖7(b)搗入階段,將作業時間設為0.4 s,并考慮搗鎬和道砟間的相互作用,設置搗鎬運動為先勻速后勻減速運動,初速度設為1880 mm/s,勻速運動時間設為0.1 s,勻減速階段加速度設為18800/3 mm/s2。

圖7 搗固作業過程及搗鎬運動Fig.7 Tamping operation process and tamping pick movement
在圖7(c)夾持階段,假設各搗固鎬鎬尖的線位移相同,將夾持時間設為1 s,根據鎬尖至旋轉中心的距離、夾持時間與搗鎬旋轉角度的關系,通過換算得到外鎬、內鎬和第三鎬的角速度分別為7.2 °/s、8.4 °/s 和9.2 °/s。在圖7(d)的撤鎬回轉及提升階段,先將外鎬、內鎬和第三鎬的角速度設為-14.4 °/s、-16.8 °/s 和-18.4 °/s,持續時間設為0.5 s 來完成搗鎬回轉作業,然后在各搗鎬上施加先勻加速后勻速的運動來完成搗鎬提升歸位作業,其中勻加速階段各搗鎬加速度為-18800/3 mm/s2,勻速階段各搗鎬速度為-1880 mm/s。
2.2 模型可靠性驗證
本文為驗證三枕搗固裝置-軌排-有砟道床耦合仿真模型的正確性,在北京豐臺站附件某高鐵線路開展了三枕搗固作業前后道床橫向阻力試驗[10],如圖8 和圖9 所示。現場搗固作業起道量為30 mm,搗鎬激振頻率35 Hz,搗固時間2.4 s,夾持時間1 s,外鎬夾持壓力為90 bar,內鎬夾持壓力為120 bar,第三鎬夾持壓力為125 bar,行車速度為1 km/h。搗固作業前后道床橫向阻力測試結果,如圖10 所示。

圖8 現場搗固作業車Fig.8 On-site tamping operation vehicle

圖9 搗固作業后道床橫向阻力試驗Fig.9 Lateral resistance test of ballast bed after tamping

圖10 道床橫向阻力及阻力功試驗結果與仿真結果Fig.10 Test and simulation results of lateral resistance and resistance work of ballast bed
由圖10 可知,搗固作業可使道床橫向阻力降低約51%,且搗固作業前后道床橫向阻力及阻力功的試驗結果和仿真結果變化規律基本一致。由圖10(a)可知,搗固作業前道床橫向阻力試驗結果為12.07 kN,模擬結果與其相差大約1.33%;搗固作業后道床橫向阻力試驗結果為5.92 kN,模擬結果為5.75 kN,相差2.87%。由圖10(b)可知,搗固作業前道床橫向阻力功試驗結果與模擬結果相差0.768 J,大約為試驗結果的4.27%;搗固作業后道床橫向阻力功的試驗結果為8.557 J,模擬結果為8.168 J,兩者相差4.54%。綜上所述,搗固作業前后道床橫向阻力及阻力功的試驗結果和仿真結果在數值大小、曲線走勢等方面均較為吻合,從而驗證了三枕搗固裝置-軌排-有砟道床耦合仿真模型中接觸參數的正確性及模型的可靠性。
3 道砟顆粒細觀運動
3.1 道砟顆粒平動
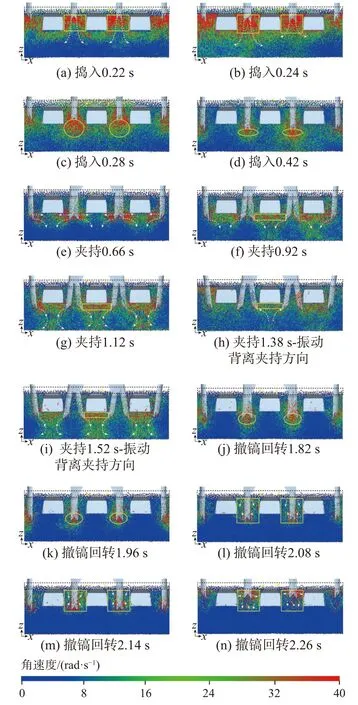
搗固作業過程伴隨著搗鎬振動、擠壓道砟等復雜的力學行為,對于搗固作業過程道砟顆粒平動特征的描述和表征是探明道砟與搗鎬間細觀相互作用的關鍵。本文為研究道砟和搗鎬間的相互作用,提取了鋼軌外側搗固作業過程中道砟顆粒速度的大小和方向,繪制了不同搗固階段道砟顆粒速度分布云圖,如圖11 所示。
由圖11 可知,在搗固作業過程中道砟顆粒速度變化規律極為復雜,較大速度道砟顆粒分布區域隨著搗固時間的增加,區域面積不斷發生變化。由圖11(a)~圖11(d)可知,在搗入階段道砟顆粒較大速度分布區域面積隨著搗入深度的增加,呈逐漸減小趨勢,且較大速度道砟顆粒主要分布在鎬掌周圍。另外,隨著搗入深度的增加,搗鎬對道砟顆粒的影響區域先增大后逐漸減小,砟肩區域較大速度道砟顆粒的數目也呈先增大后減小的趨勢,但砟肩道砟顆粒在搗入階段的速度方向均豎直向上,這與搗鎬下插速度及振動密切相關。
由圖11(e)~圖11(h)可知,在夾持階段(1.38 s除外)鎬掌周圍的較大速度道砟顆粒數目隨著夾持角度的增加而逐漸增多,且枕下鎬掌直接作用的道砟顆粒速度方向從弧形向上的運動方式逐漸趨于直線型運動,而鎬掌以下區域道砟顆粒的速度呈“喇叭狀”逐漸向下延伸和擴展,其影響區域不斷擴大;砟肩道砟顆粒速度方向不斷變化,始終保持向下的運動趨勢,相比于搗入階段速度明顯減小。進一步對比分析可知,在1.38 s 時鎬掌周圍較大速度道砟顆粒分布面積迅速減小。這是由于搗鎬在夾持作業過程中伴隨著搗鎬左右振動,當夾持方向與振動方向相同時,枕下較大道砟顆粒速度分布區域會明顯增大;當夾持方向與振動方向相反時,枕下較大速度道砟顆粒分布面積會迅速減小。綜上所述,起道量恒定的情況下,當夾持階段搗鎬的夾持方向與振動方向保持一致時,有助于道砟顆粒快速向枕下區域移動,填充軌枕和道砟之間的空隙,有利于枕下道砟密實。
由圖11(i)~圖11(k)可知,在撤鎬回轉階段,當搗鎬回轉方向與振動方向相反時,較大速度道砟顆粒的分布面積會增大,尤其在初始撤鎬階段。之后隨著撤鎬回轉角度的增加,鎬掌周圍的較大速度道砟顆粒數目逐漸減小,且隨著搗鎬振動方向不斷變化,鎬掌周圍較大速度道砟顆粒的分布形式在中心聚集狀態與四周放散狀態來回演變,但整個過程中搗鎬對道砟顆粒的影響區域卻逐漸減小。綜上可知,起道量保持不變的情況下,在撤鎬回轉階段,當搗鎬的回轉方向與振動方向相反時,有利于保持夾持階段枕下道砟的密實性。
由圖11(l)~圖11(n)可知,在撤鎬提升階段,搗鎬主要影響區域為枕間區域。隨著搗鎬提升高度的增加,鎬掌周圍較大速度道砟顆粒分布區域逐漸轉移到搗鎬上沿,且鎬掌以下區域道砟顆粒有向下的運動趨勢,而鎬掌以上區域道砟顆粒有向上的運動趨勢,這與搗鎬提升方向及道砟填充鎬掌所占區域的動態過程密切相關。
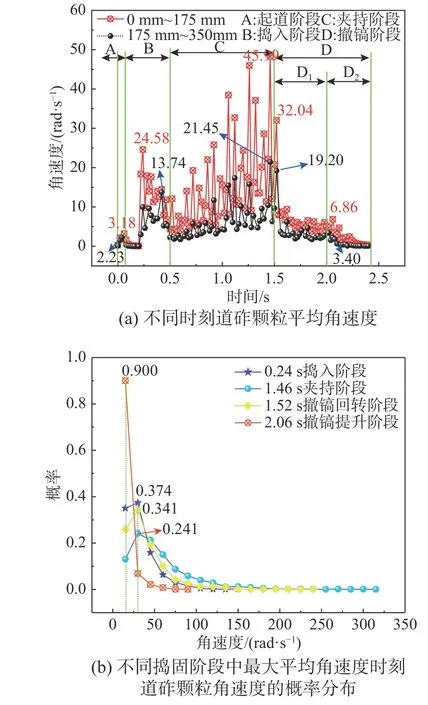
為進一步研究搗鎬運動對道砟顆粒平動特性的影響,將搗鎬主要作用區域中間軌枕底部道砟顆粒劃分為2 部分(0 mm~175 mm 和175 mm~350 mm)進行統計分析,如圖12 所示。根據圖12 的劃分的區域,統計得到了搗固作業過程中各區域道砟顆粒的平均速度,并借助式(1)計算了不同搗固階段中最大平均速度時刻道砟顆粒速度的概率分布,如圖13 所示。

圖12 統計區域劃分 /mmFig.12 Division of statistical regions

圖13 搗固過程中道砟顆粒平均速度變化Fig.13 Average velocity change of ballast particles during tamping
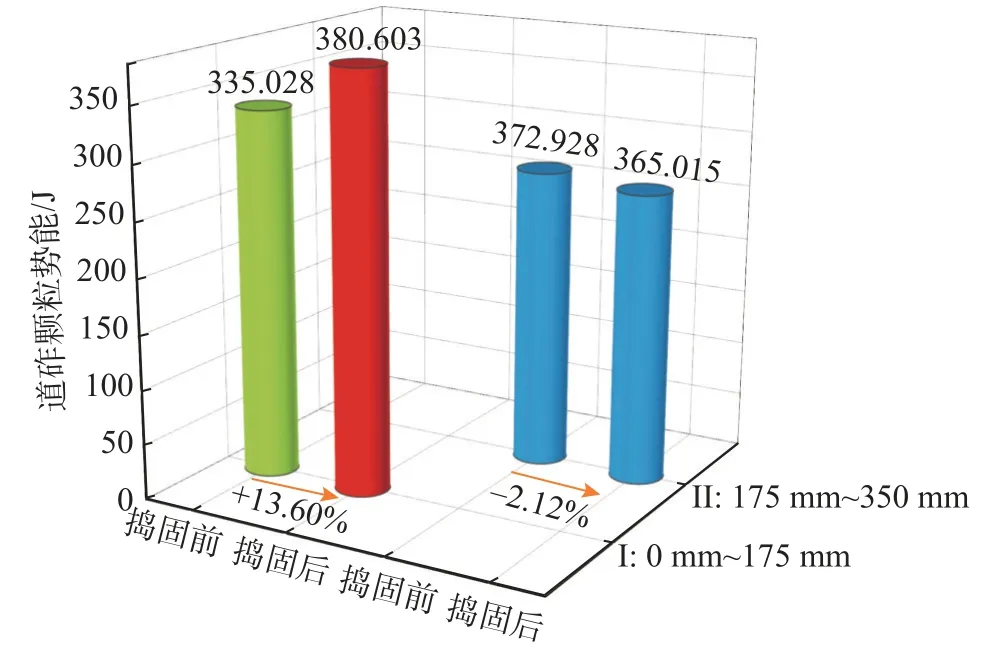
式中:pij為搗固作業第j階段區域i的最大平均速度時刻道砟顆粒速度的概率分布;Nij為搗固作業第j階段區域i的道砟顆粒總個數;naij≤xij 由圖13(a)可知,隨著搗固作業時間的增加,0 mm~175 mm 和175 mm~350 mm 區域的道砟顆粒平均速度均呈先增大后減小,再增大又減小的趨勢,且0 mm~175 mm 區域的變化幅度更大。對比各個搗固階段不同區域的道砟顆粒最大平均速度可知,各區域道砟顆粒最大平均速度均出現在夾持階段,且隨著搗固時間的增加,各搗固階段的最大平均速度差值呈先增大后減小的趨勢,最大差值為0.45 m/s,約為175 mm~350 mm 區域夾持階段的64.3%,這進一步說明了夾持階段是枕下道砟密實的關鍵,也表明了搗鎬作業過程中的主要影響區域為枕下0 mm~175 mm,這與圖11 中道砟顆粒細觀平動規律相一致。 由圖13(b)可知,不同時刻(不包括2.06 s)道砟顆粒速度概率分布隨著速度的增大,均呈先增大后減小的趨勢。搗入階段道砟顆粒速度占比較高的區域位于0.5 m/s 附近,撤鎬回轉階段位于0.75 m/s 附近,提升階段位于0.2 m/s 附近。這些階段道砟顆粒速度概率分布曲線極差較大,道砟顆粒速度分布不均勻,道床狀態不穩定。而在夾持階段道砟顆粒速度占比較高區域在1.25 m/s 附近,道砟顆粒速度概率分布曲線極差較小,道砟顆粒速度分布較為均勻,平均道砟顆粒速度較高,填充枕下軌枕與道砟空隙的速度越快,有利于枕下道砟密實,這也說明了枕下道砟密實狀態關鍵取決于夾持階段與回轉階段的分界點處搗鎬與道砟間的相互作用。 在搗鎬振動、下插、夾持、回轉和提升等復雜運動過程中,道砟顆粒平動的同時也伴隨著旋轉運動,對道砟顆粒旋轉特性及轉動方式的研究是探明搗固作業過程中道砟顆粒細觀運動力學機制的紐帶。為研究搗固作業過程道砟顆粒的旋轉細觀特征,繪制了不同搗固階段道砟顆粒角速度分布云圖,如圖14 所示。 圖14 搗固作業過程道砟顆粒角速度演變過程Fig.14 Evolution process of angular velocity of ballast particles during tamping 由圖14 可知,搗固作業過程中道砟顆粒角速度的變化規律與圖11 道砟平動特征變化規律較為相似。由圖14(a)~圖14(d)可知,在搗入階段較大角速度道砟顆粒分布區域主要位于鎬掌周圍,且隨著搗入深的增加,較大角速度道砟顆粒分布區域先擴大后逐漸減小,搗鎬振動下插動作的影響范圍逐漸縮小,砟肩道砟角速度方向也不斷發生變化。 由圖14(e)~圖14(h)可知,在夾持階段(不包括1.38 s)隨著搗鎬夾持角度的增加,鎬掌下沿與軌枕底部間較大角速度道砟顆粒的分布面積逐漸增大。當搗鎬夾持方向與振動方向相反時(1.38 s),較大角速度道砟顆粒分布面積有減小趨勢,這是由于該時刻的搗鎬夾持瞬態角位移小于相反方向搗鎬的振動角位移。此外,隨著夾持角度的增加,砟肩道砟顆粒的角速度逐漸減小,這說明夾持階段對砟肩道砟顆粒旋轉運動影響較小。 由圖14(i)~圖14(k)可知,隨著回轉角度的增加,較大角速度的道砟顆粒分布區域逐漸減小,搗鎬的影響范圍也逐漸減小,且較大角速度的道砟顆粒分布區域由最初的“喇叭狀”演變為“橢圓狀”。由圖14(l)~圖14(n)可知,隨著搗鎬提升高度的增加,較大角速度道砟顆粒的分布區域及搗鎬的影響范圍逐漸上移,鎬掌下沿以上的道砟顆粒角速度有向上的運動趨勢。砟肩道砟顆粒在初始提升階段有向道床內部轉動的趨勢,而隨著搗鎬提升高度的增加,道砟顆粒角速度不斷發生變化,又有向道床外部轉動的趨勢,這表明提升階段后期不利于砟肩道砟密實。 為進一步分析搗固作業對道砟顆粒轉動特性的影響,利用3.1 節道砟顆粒速度的統計方法,獲得了搗固作業過程中各區域道砟顆粒的平均角速度及不同搗固階段中最大平均角速度時刻道砟顆粒角速度的概率分布,如圖15 所示。 圖15 搗固過程中道砟顆粒平均角速度變化Fig.15 Average angular velocity change of ballast particles during tamping 由圖15(a)可知,隨著搗固作業時間的增加,0 mm~175 mm 和175 mm~350 mm 區域的道砟顆粒平均角速度均呈先增大后減小,再增大又減小的趨勢,且0 mm~175 mm 區域的變化幅度更大,這與圖13(a)道砟顆粒的平均速度變化規律一致。另外,隨著搗固時間的增加,各搗固階段的最大平均角速度差值呈先增大后減小的趨勢,最大差值為24.54 rad/s,約為175 mm~350 mm 區域夾持階段的114.4%。對比各個搗固階段不同區域的道砟顆粒最大平均角速度可知,各區域道砟顆粒最大平均角速度均出現在夾持階段,且搗固過程中各階段最大平均角速度出現的時間與圖13(a)有較好的一致性,這表明當道砟顆粒平均速度達到最大時,0 mm~175 mm 區域道砟顆粒的平均角速度也達到最大,兩者具有很好的同步性,這有助于枕側道砟顆粒填充枕下空隙。 由圖15(b)可知,不同時刻(不包括2.06 s)道砟顆粒角速度概率分布隨著速度的增大,均呈先增大后減小的趨勢。搗入、夾持和撤鎬回轉階段道砟顆粒角速度占比較高的區域均位于30 rad/s 附近,但夾持階段的道砟顆粒角速度概率分布曲線極差較小,道砟顆粒角速度較為均勻,有利于枕側道砟在搗鎬夾持動作迫使道砟顆粒平動的同時發生顆粒轉動,減弱了道砟顆粒間的互鎖效應,加速了枕側道砟向枕下空隙運動的速率。此外,道砟顆粒瞬態角速度越大,說明在該時刻道砟向某個方向運動的能量越大,搗鎬對道砟作用就越劇烈。因此,道砟顆粒角速度的大小有助于量化搗鎬對道砟的細觀相互作用。 搗固作業過程中道床能量的演變規律可以間接反映搗鎬和道砟之間的能量傳遞過程及道床內部的能量傳遞機理。為研究搗固作業過程搗固區域枕下道床的能量演變規律,繪制了0 mm~175 mm和175 mm~350 mm 兩個區域的道砟顆粒平動動能、轉動動能、勢能及道砟顆粒總能量變化曲線,如圖16 所示。圖16 中任意時刻的道砟顆粒的平動動能、轉動動能及勢能,可通過式(2)~式(4)計算得到。 圖16 搗固區域軌枕下方道砟顆粒能量演變規律Fig.16 Evolution of ballast particle energy under sleeper in tamping area 式中:Kb道砟顆粒平動動能;mbi為第i個道砟顆粒質量;Vbi為第i個道砟顆粒速度;Mb為道砟顆粒轉動動能;Jbi為第i個道砟顆粒轉動慣量;ωbi為第i個道砟顆粒角速度;Pe為道砟顆粒勢能;hbi為第i個道砟顆粒距離0 勢能面的高度;Np為道砟顆粒數目。 由圖16 可知,區域0 mm~175 mm 的道砟顆粒平動動能、旋轉動能、勢能及總能量均大于175 mm~350 mm 區域,這表明搗鎬對175 mm~350 mm 道砟顆粒能量傳遞及演變影響較小。由圖16(a)可知,道砟顆粒的平動動能在搗入和夾持階段的變化最為明顯,最大平動動能可達到61.420 J。由圖16(b)可知,道砟顆粒旋轉動能變化規律基本與平動動能相一致,最大旋轉動能為12.490 J 是平動動能的20.33%,這表明搗鎬對道砟的作用既有平動也有轉動,但道砟顆粒平動所需的能量較大。同時也說明了軌枕下的空隙主要是通過“道砟顆粒以平動為主,轉動為輔”的方式進行填充。 由圖16(c)可知,隨著搗鎬作用時間的增加,0 mm~175 mm 的道砟顆粒勢能先逐漸增大,后緩慢減小,之后又緩慢增大趨于平穩,最大勢能可達384.640 J,是道砟顆粒平動動能的6.26 倍,這說明搗固作業主要影響道砟勢能的變化,0 mm~175 mm 區域內道砟顆粒勢能提高的越明顯,軌枕以下的道床密實度越大,搗固作業后軌枕的下沉量越小。此外,在撤鎬回轉階段道砟勢能會有減小趨勢,這是由于搗鎬振動作用使夾持動作后0 mm~175 mm 內的道砟顆粒位置發生了變化,部分道砟顆粒高度會有所降低。 道砟顆粒總能量是衡量任意時刻搗鎬給道砟顆粒傳遞的能量多少的尺度。由圖16(d)可知,道砟的總能量在夾持階段增長的幅度最大,高低起伏也最為明顯,這說明了夾持階段搗鎬給道砟傳遞的能量較多,這與現場搗固作業夾持階段搗鎬做功較多相一致,很好的解釋了現場搗固作業的宏觀過程對道砟顆粒細觀特性的影響。 道砟顆粒勢能的變化與搗固質量狀態密切相關,可以間接反映枕下區域道床的密實情況。為進一步研究搗固作業對道砟顆粒勢能的影響,獲取了搗固作業前后0 mm~175 mm(Ⅰ)和175 mm~350 mm(Ⅱ)兩個區域的道砟顆粒勢能,如圖17 所示。 圖17 搗固前后枕下區域道砟顆粒勢能Fig.17 Potential energy of ballast particles in the area under the sleeper before and after tamping 由圖17 可知,搗固作業前Ⅰ區域的道砟顆粒勢能為335.028 J,搗固作業后為380.603 J,增長了13.60%;而Ⅱ區域搗固作業前道砟顆粒勢能為372.928 J,搗固作業后為365.015 J,減小了2.12%。這表明搗鎬主要影響Ⅰ區域,對Ⅱ區域作用較弱,這與圖13(a)和圖15(a)得出的結論相一致,這也很好的揭示了搗鎬和道砟之間能量傳遞規律。 本文結合DWL-48 連續式搗固穩定車搗固裝置的實際作業過程,利用離散元與多體動力學耦合仿真理論建立了三枕搗固裝置-軌排-散體道床三維空間耦合仿真模型,分析了道砟和搗鎬之間的細觀運動力學機制,揭示了三枕搗固裝置細觀作業方式及道砟顆粒的運動形式。具體結論如下: (1) 利用離散元與多體動力學相關理論,基于縮減部分道砟顆粒樣本組合球數目及占比的方式,建立了三枕搗固作業數值仿真模型,通過現場試驗驗證了模型的可靠性。通過分析現場試驗結果發現,三枕搗固作業可使道床橫向阻力降低約51%。因此,建議現場搗固作業后應及時進行穩定作業,恢復道床橫向抵抗變形能力。 (2) 在搗固作業過程中道砟顆粒速度的變化規律極為復雜,較大速度道砟顆粒分布區域隨著搗固時間的增加,區域面積不斷發生變化。通過分析道砟顆粒速度變化規律發現,在夾持階段0 mm~175 mm 區域的道砟顆粒速度概率分布曲線極差較小,道砟顆粒速度分布較為均勻,平均道砟顆粒速度較高,填充枕下軌枕與道砟空隙的速度越快,有利于枕下道砟密實。 (3) 在搗固作業過程中道砟顆粒角速度的變化規律與速度變化規律較為相似。當道砟顆粒平均速度達到最大時,0 mm~175 mm 區域道砟顆粒的平均角速度也達到最大,兩者具有很好的同步性,這有助于枕側道砟顆粒快速填充枕下空隙。此外,道砟顆粒角速度的大小有助于量化搗鎬對道砟的細觀相互作用。 (4) 搗固作業主要影響枕下搗固區域0 mm~175 mm 范圍內道砟顆粒能量變化。搗固作業過程中伴隨著道砟顆粒平動動能和旋轉動能向道砟顆粒勢能的轉變過程,且搗鎬采用以“道砟平動為主,轉動為輔”的方式填充枕下空隙。此外還發現,枕下搗固區域道砟顆粒勢能與密實度密切相關,道砟顆粒勢能越大,枕下搗固區域密實程度就越好。3.2 道砟顆粒旋轉運動
4 道床內部能量演變規律

5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
