基于多源域自適應殘差網絡的滾動軸承故障診斷
2024-04-20 11:29:54高學金張震華高慧慧齊詠生
振動與沖擊 2024年7期
高學金, 張震華 , 高慧慧 , 齊詠生
(1.北京工業大學 信息學部,北京 100124;2.數字社區教育部工程研究中心,北京 100124;3.城市軌道交通北京實驗室,北京 100124;4.計算智能與智能系統北京市重點實驗室,北京 100124;5.內蒙古工業大學 電力學院,呼和浩特 010051)
滾動軸承是旋轉機械設備中承受載荷和傳遞動力的核心部件,廣泛地應用于工業領域中。然而很多設備中的滾動軸承長時間工作在高溫、高壓等惡劣的工況下[1]。因此,滾動軸承是極易損壞的元件之一,而一旦機械設備的滾動軸承發生故障,例如磨損、斷裂等,極有可能會產生嚴重的后果[2-3]。據相關文獻統計,軸承故障占機械設備總故障的40%~50%[4-5]。因此,及時、準確地識別軸承的故障至關重要[6-7]。
近年來,深度學習在軸承故障診斷領域得到了廣泛應用。其中最常用是深度卷積神經網絡(deep convolutional neural networks,DCNN)[8-9]、長短期記憶網絡(long short-term memory,LSTM)[10]、自動編碼器(autoencoder,AE)[11]和支持向量機(support vector machine,SVM)[12]等。這些方法通常可以很好地解決大多數滾動軸承故障診斷問題[13],這得益于大量標記的、相同分布的訓練數據[14]。然而,在工業中很難滿足這一假設,因為軸承的工作條件隨著不同的任務不斷變化[15-18]。由于訓練和測試數據的分布不同,性能上也會出現差距,這通常被稱為域移位[19]。因此,一種稱為無監督領域自適應(unsupervised domain adaptation,UDA)[20]的研究發展起來,其主要思想是通過利用已標記的源域數據和未標記的目標域數據減少跨域不匹配問題的影響[21]。目前,將UDA集成到故障診斷模型中的主流方法有兩種:統計距離度量方法和領域對抗訓練方法。第一類方法通過減小統計指標從而縮小源域和目標域的分布差異,例如最大平均差異(maximum mean discrepancy,MMD)[22]及其改進版本,包括多項式核誘導MMD(PK-MMD)[23]和聯合MMD[24]。Li等[25]采用Wasserstein距離度量準則測量分布差異,并在此基礎上開發用于部分域自適應的雙重對齊策略。UDA的第二類方法利用生成器和鑒別器之間的對抗訓練實現特征對齊。Farajzadeh-Zanjani等[26]提出一種GBSS(generative-adversarial based semi-supervised)的生成對抗學習方法,以捕獲訓練樣本的分布,從而提高在惡劣條件下的診斷性能。然而對抗學習方法在對抗訓練的過程中會造成某些信息的丟失。統計距離度量方法忽略了兩個域中子域之間的關系,混淆相關子域的分布和故障分類結構,可能會丟失每個類的細粒度信息。且傳統UDA方法主要設計為從單個源域適應到單個目標域(single-target domain adaptation,STDA),即目標域服從單一分布,這限制了其工業適用性。
隨著工業自動化的發展,各類旋轉機械在多工序、多任務約束下,其軸承轉速與載荷均會發生變化。故障診斷中的遷移任務不可避免地需要執行多次,具有多個目標分布的多工況故障診斷場景,尚未得到很好的解決。多目標域自適應(multi-target domain adaptation,MTDA)旨在將知識從已標記的源域數據轉移到多個未標記的目標域數據[27]。與單目標域自適應(STDA)相比,MTDA中的特征分布更為復雜和廣泛。雖然UDA方法的研究已經相當成熟,但大多數UDA方法都不能簡單地擴展到多目標域,而且傳統的UDA方法不可避免地在單一域上進行過擬合, 當診斷樣本為多個目標域時,會導致較高的誤診率[28]。
為了解決傳統無監督領域自適應方法擴展到多目標域軸承故障診斷適用性較弱的問題,本文提出了一種多源域自適應殘差網絡進行多工況下的滾動軸承故障診斷。該網絡以滾動軸承已標記源域數據和未標記目標域數據作為輸入,利用特征提取器充分提取可遷移特征。引入局部最大平均差異(local maximum mean difference,LMMD)度量準則,計算兩域間的特征分布差異以最小化類內距離和最大化類間距離,減少相關子域間和全局域間的分布差異,進而對齊全局分布和邊緣分布。基于西儲大學標準軸承數據集和MFS(machine failure simulation)機械綜合故障試驗臺產生的真實軸承振動數據,進行了多工況遷移試驗驗證,與現有代表性方法相比,多源域自適應殘差網絡(multi-source domain adaptive residual network,MDARN)具有更好的故障診斷性能,試驗結果證實了該方法在多工況下滾動軸承故障診斷的有效性。
1 問題定義和理論背景
1.1 問題定義


1.2 Inception block卷積模塊
傳統卷積神經網絡為獲得更深層次的特征圖,傾向于使用更深層次的架構,這導致參數過多,訓練難度大,更重要的是增加了時間和空間消耗[29]。然而,Inception模塊為提取更深層次的特征圖提供了一種不同的方法。Inception模塊包含幾個具有不同內核大小的并行卷積層,其架構如圖1所示。初始塊有四個不同的卷積層:內核大小為1×1的卷積層(縮寫為conv1×1)、conv2×2、conv3×3和內核大小為3×3的最大池化層。經過四個不同圖層的提取后,輸出特征圖被連接到其最后一個通道。由于不同通道中卷積核的大小不同,來自不同通道的特征呈現不同的含義。同時,Inception模塊克服了傳統神經網絡的缺點,并行架構減少了反向傳播中梯度的下降。

圖1 Inception模塊Fig.1 Inception module
1.3 ResNext網絡
近年來,卷積神經網絡在計算機視覺、圖像分類等領域得到了廣泛的應用。深度卷積神經網絡得到蓬勃發展,但是隨著淺層疊加成深層網絡,模型出現退化和梯度爆炸等現象。而ResNet[30]殘差塊的跳躍連接,緩解了梯度消失的問題。鑒于Inception的“拆分—轉換—合并”策略在計算復雜度較低的情況下,達到接近大型密集網絡的特征提取能力。基于此,Xie等[31]提出了ResNeXt網絡,ResNeXt是ResNet和Inception的結合體,其本質是分組卷積。ResNeXt采用了ResNet的重復層策略,同時利用了“拆分—轉換—合并”策略,如圖2所示。ResNeXt在保持或降低參數復雜度的前提下提高精度,同時減少超參數的數量。ResNeXt網絡的殘差部分,輸入特征被分割成 32個低維嵌入,之后對32個低維嵌入進行變換,再嵌入聚合。右側的捷徑(Shortcut)從輸入連接輸出,主線由聚合后的輸出與右側捷徑輸出相加,之后經過ReLu激活函數得到整個塊的輸出。

圖2 ResNeXt模塊Fig.2 ResNeXt module
1.4 局部最大均值差異LMMD
為了減小源域和目標域之間的分布差異,本文引入差異度量準則計算兩域間的特征分布差異。最大均值差異(MMD)[32]是度量兩種分布差異的有效距離指標。給定源域D(s)和目標域D(t),源域和目標域樣本分別取自不同的概率分布p,q。通過核函數φ(g)將數據映射到再生核希爾伯特空間(RKHS)H中,兩域之間的MMD距離可表示為

(1)

(2)
式中,δ>0為帶寬參數。
局部最大均值差異(LMMD)[33]是由MMD演變而來的。兩域之間的LMMD距離可表示為
(3)

(4)

(5)
式中,zl為第l層全連接層的激活(l∈L={1,2,…,|l|})。
2 基于MDARN滾動軸承變工況故障診斷
2.1 網絡模型結構
MDARN網絡模型結構如圖3所示。主要包括特征提取器、子領域自適應和故障分類器。在診斷過程中,具有標記樣本的兩個源域D(s)提供診斷知識,而沒有標記樣本的兩個目標域D(t)期望從D(s)學習診斷知識。特征提取器分別提取兩個源域D(s)和兩個目標域D(t)的有效故障表示特征;在子領域自適應中,通過最小化源域和目標域間同一故障類別子域的分布差異,從而拉近同一故障類別的分布;最后,由訓練好的共享故障分類器對來自兩個D(t)的未標記樣本進行分類。
首先對數據預處理,將已標記的源域數據D(s)和未標記的兩個目標域數據D(t)利用小波變換統一轉換為256×256的時頻圖;將ResNeXt設計為特征提取器,以分別在源域數據D(s)和目標域數據D(t)中挖掘可遷移特征。ResNeXt分組卷積中每個分支的拓撲結構都是相同的。在特征提取器中,ResNeXt包括初始化操作和四個殘差塊,殘差塊中有32個通道和4個不同的卷積核,見圖2。對于D(s)和D(t)的輸入,ResNeXt特征提取器的相應輸出是1×2 048矢量特征;最后,采用完全連接層連接特征提取器,分別獲得D(s)數據集的1×2 048向量Zs1、Zs2和兩個D(t)數據集的1×2 048向量Zt1、Zt2。表1給出了網絡模型結構參數詳情。

表1 模型結構參數Tab.1 Model structure parameters
由于工況的變化,訓練數據和測試數據的分布不同,模型的診斷性能也會出現差距,這通常被稱為域移位,多目標域的域偏移則更加嚴重。為了有效測量源域和目標域之間的特征分布差異,如圖3所示,本文在全連接層FC中嵌入領域自適應模塊,該模塊采用局部最大平均差異(LMMD)準則計算兩域樣本之間的分布差異。由于同一故障類別具有更強的相關性,通過對齊具有相同標簽樣本的子域可以匹配全局分布和局部分布。在子領域自適應層中,通過LMMD準則測量激活層中源域特征輸出Zs1、Zs2和目標域特征輸出Zt1、Zt2之間相關子域分布的差異,并將其距離作為MDARN模型的優化目標。以兩個源域中每一故障類別的子域分布為基礎,從源域的固有數據中學習更廣義的診斷邊界,擴大每一故障類別對應的子域的表示空間,計算目標域樣本與每一個子域的分布距離,并將其最小化,從而對齊全局分布和邊緣分布。特征自適應如圖4所示,兩目標域與源域之間的LMMD距離可表示為

圖4 特征自適應Fig.4 Feature adaptation
(6)


2.2 MDARN的優化目標
MDARN的優化目標包括源域數據D(s)健康狀態的域共享分類器損失Lc,以及源域數據D(s)和目標域數據D(t)之間子域分布的損失LLMMD。

(7)
式中:n為源域樣本總數;C為樣本類別數;zs為全連接層所生成的激活;f(zs)=softmax(zs);fc(zs,i)為輸出f(zs,i)的第c個元素。
第二個優化目標LLMMD是源域數據集D(s)和多個目標域數據集D(t)中同一故障類別子域的分布差異,采用式(6)計算兩域之間的LMMD距離。最后,MDARN模型的總體優化目標為
L=Lc+λLLMMD
(8)
式中,λ為超參數。
2.3 故障診斷流程
本文所提出方法的診斷步驟如圖5所示。
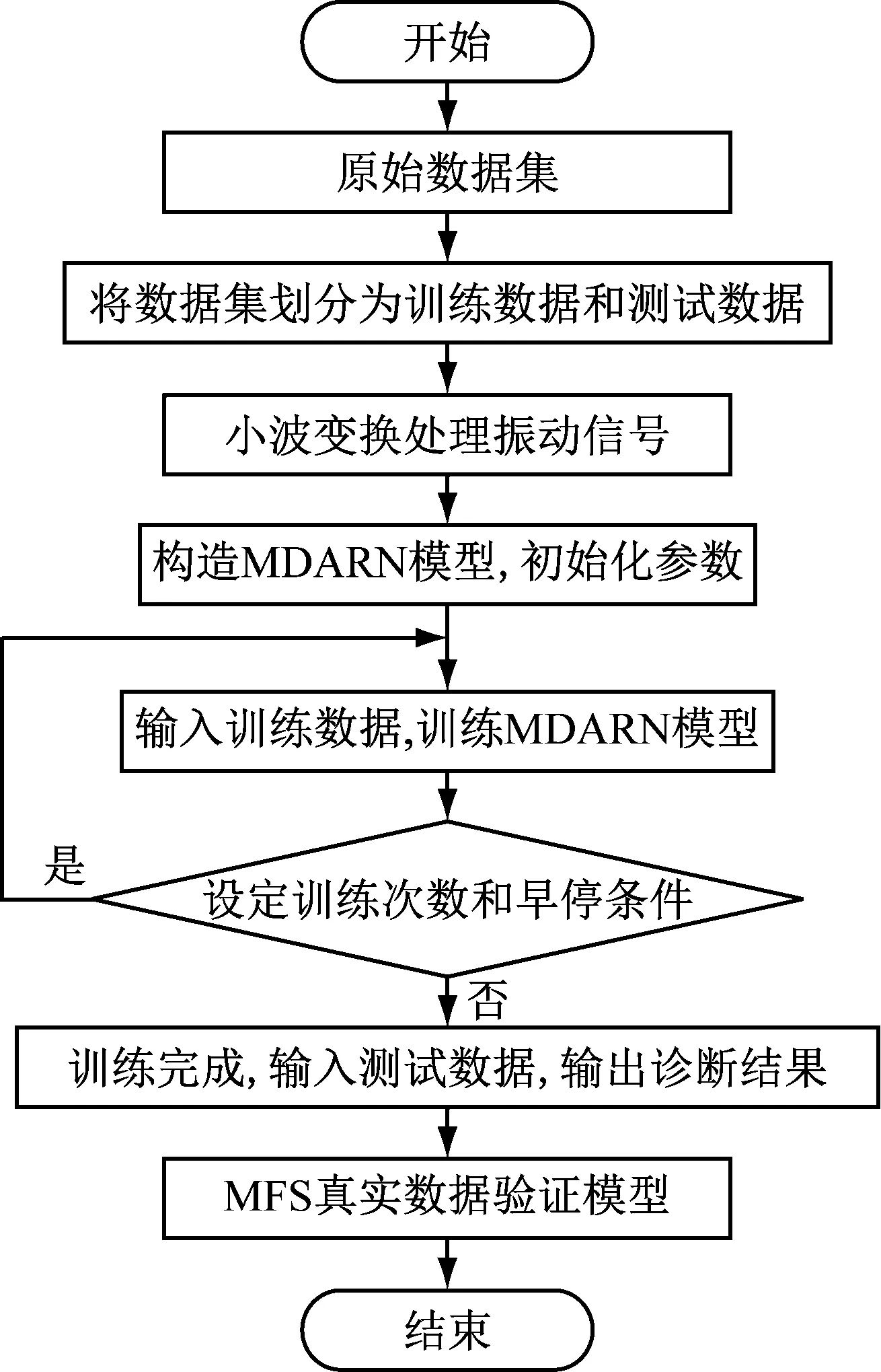
圖5 故障診斷流程圖Fig.5 Fault diagnosis flowchart
(1) 首先,準備數據集,將有標記的源域樣本作為訓練集,無標記的目標域樣本作為測試集。同時,利用小波變換將振動信號轉換成256×256的時頻圖。
(2) 構造MDARN模型,并且初始化模型參數,將數據送入模型進行訓練,計算LMMD距離損失LLMMD和分類損失Lc。
(3) 使用反向傳播對模型參數進行更新,采用早停法防止模型過擬合,并且保存訓練過程中性能最好的模型及其參數。
(4) 將測試集數據輸入到訓練好的故障診斷模型進行故障診斷。
(5) 將MFS機械綜合故障試驗臺產生的真實軸承振動數據輸入到訓練好的故障診斷模型中,進行故障診斷試驗驗證。
3 多工況遷移試驗
3.1 試驗數據
本試驗使用美國凱斯西儲大學(Case Western Reserve University,CWRU)提供的軸承數據集作為基準數據集進行試驗研究。該數據集被廣泛用于試驗驗證,由采樣頻率為12 kHz的加速度傳感器從電機驅動端采集。試驗軸承在1 797 r/min、1 772 r/min、1 750 r/min和1 730 r/min四種工況下運行。為了模擬故障情況,利用電火花匹配技術,將不同故障直徑(0.007、0.014、0.021英寸)的單點故障分別植入滾動軸承的內圈、外圈和滾珠。軸承故障位置位于內圈、外圈和滾珠,每種故障類型都含有三種損傷等級。因此,該數據集包含1種正常和9種故障狀況,以1 024個連續時間序列的分段振動信號組成一個樣本,每種狀態都含有200個樣本,每種工況下樣本總數則為2 000。整個數據集的劃分如表2所示。表3則詳細描述了工況A下數據劃分情況。工況B、C和D的數據劃分方式同工況A。

表2 CWRU數據集Tab.2 CWRU dataset

表3 工況A下數據劃分詳情Tab.3 Details of data division under working condition A
3.2 試驗參數設置
試驗所使用計算機的系統為Windows;CPU為intel i5-12400F 16GB;GPU為NVIDIA GTX 1650 SUPER 4GB。試驗環境:Pytorch 1.0.0;Python 3.9。訓練過程

3.3 對比試驗與分析
在本小節中,進行了多工況遷移試驗。在每個試驗中,其中兩個工況被視為目標域,另外兩個工況則被視為源域,如A+B→C+D任務將A和B視為源域,而C和D則視為目標域。因此,共有六種遷移場景。為了驗證本文所提出的方法的優越性,在本試驗中使用了幾種目前最先進的方法與提出的方法進行比較,包括DDC[34]、DAN[35]、MFSAN[36]和MRAN[37]。Resnet網絡作為比較的基準方法,也被納入并測試。這些方法均按照論文中給定的參數復制模型。表4展示了各類方法在不同遷移任務中的識別準確率,并且計算了在每一種遷移任務中,本文方法相較于其他五種方法在該任務下最高診斷準確率的差值。由表4可知,六種方法的平均識別準確率依次為93.01%、94.46%、96.70%、96.72%、98.71%和99.76%。本文方法在所有故障診斷任務中的表現均優于相較于其他方法,其平均診斷準確率相較于表現最好的MRAN提升了1.05%。試驗結果表明,在滾動軸承多工況遷移故障診斷任務中,本文所提出的MDARN方法獲得了最佳診斷性能,故障診斷效果顯著優于其他五種方法。這表明本文所提的方法提取到可遷移特征,并且有效減小了相關子域間和全局域間的分布差異。同時,表5統計了基于各個遷移任務中各模型迭代一次的訓練用時、總訓練用時和測試集測試用時。各方法的測試用時接近,而本文所提方法的總訓練用時僅比MRAN方法的時間多了13.59 s,比DDC方法多了302.14 s, 卻在故障診斷準確率上又獲得了進一步的提高,因此本文所提方法在故障診斷上更有優勢。以上試驗結果驗證了本文提出的MDARN方法在滾動軸承多工況遷移故障診斷任務中的優越性。

表4 不同遷移任務下的診斷準確率Tab.4 Diagnostic accuracy under different migration tasks

表5 模型訓練及測試時間Tab.5 Model training and testing time 單位:s
由于有誤分類現象的存在,本文計算了遷移任務A+B→C+D的分類混淆矩陣,以展示每個類別的分類精度。如圖6所示,模型在故障診斷中對內圈和外圈故障的分類存在誤差,但故障診斷平均準確率已達到99.65%,表現出較高的診斷精度。在其它的遷移場景中也是如此。這主要是因為在不同工況下,內外圈故障特征較為相近,導致特征產生混疊,從而造成了誤分類現象。

圖6 分類混淆矩陣Fig.6 Classification confusion matrix
3.4 特征可視化
為了更直觀地分析本文方法的優點,選擇遷移任務A+B→C+D的特征可視化圖進行對比分析。本文隨機挑選了200個樣本,并使用t分布隨機鄰域嵌入(t-SNE)將高維特征降為二維可視化圖。本文中的六種方法的可視化結果如圖7所示。在圖7中,黑色圖形代表源域數據,灰色圖形代表目標域數據,不同形狀的圖形代表不同的故障類別。由圖7(a)、(c)、(d)、(e)可知,ResNet、 MRAN、DAN、DDC在分類時存在類別重疊和特征分布較近的問題。由圖7(b)可知, MFSAN特征分布均勻,但存在個別特征誤分現象。由圖7(f)可知, MDARN學習到的特征分布差異要小得多,誤分類樣本也更少。MDARN有效的對齊了全局分布和同一類別子域的分布,各類別間具有明確的邊界,便于分類器更好地識別故障類別。因此,可視化結果進一步印證了本文所提方法的優越性。

圖7 t-SNE可視化結果Fig.7 t-SNE visualization results
3.5 算法實際驗證
為了驗證MDARN滾動軸承故障診斷方法在實際工程信號上的實用性,本文對MFS軸承故障模擬試驗臺上采集的真實的軸承振動信號進行試驗驗證。試驗選用了Spectra Quest公司生產的MFS機械故障綜合模擬裝置,如圖8所示。試驗臺能夠模擬軸承外圈、內圈和滾珠發生故障時的情況,并提供軸承振動信號。通過對真實軸承振動信號進行故障診斷,以驗證本文方法的有效性。
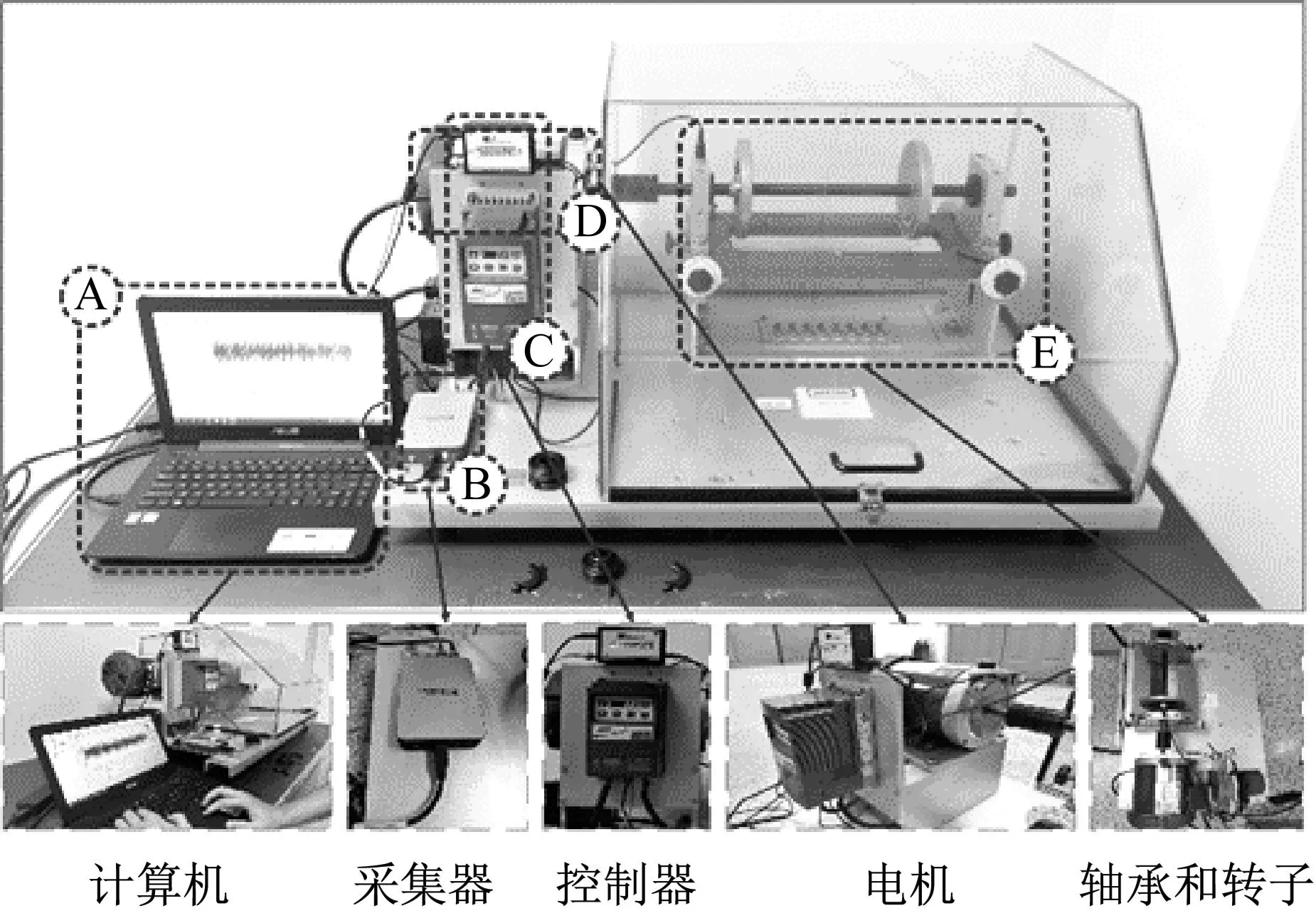
圖8 MFS機械故障綜合模擬試驗臺Fig.8 MFS mechanical failure comprehensive test bench
MFS數據集采集自電機驅動端的加速度傳感器,用于測試軸承在不同工況下的性能表現,轉子試驗臺負載力矩范圍為0~6 N·m。不同轉速的四種工況包括0負載下3 000 r/min、2 000 r/min、1 500 r/min和1 200 r/min。不同負載的四種工況包括2 000 rmp轉速下0%、30%、60%、100%負載,軸承故障位置位于內圈、外圈和滾珠,因此該數據集包含四種軸承健康狀況,其中包括一種正常和三種故障狀態。每種狀態都有200個樣本,每種工況下共有800個樣本。表6和表7分別描述了不同轉速和不同負載下四種工況數據集的劃分情況。表8描述了各工況下數據劃分詳情。

表6 MFS不同轉速數據集Tab.6 MFS different speed datasets

表7 MFS不同負載數據集Tab.7 MFS different load datasets

表8 各工況下數據劃分詳情Tab.8 Details of data division under various working conditions
試驗參數設置同上述變工況遷移試驗。選出兩種工況作為目標域,而余下的兩種工況則被作為源域,因此不同轉速和不同負載試驗各有6種遷移場景。表9和表10分別展示了本文方法在真實軸承信號不同轉速和不同負載的遷移任務中的故障診斷準確率。根據診斷結果,在對MFS軸承故障模擬試驗臺上采集的真實的軸承振動信號進行故障診斷時,本文所提出的方法仍能保持較高的故障診斷準確率,不同轉速和負載的平均識別準確率分別為97.22%、96.99%。與在CWRU數據集上的試驗結果相比,故障診斷準確率有所降低,這主要是因為從MFS軸承故障模擬試驗臺上采集的軸承振動信號有著較高的噪聲和干擾。

表9 不同轉速下軸承故障診斷準確率Tab.9 Accuracy of bearing fault diagnosis at different rotational speeds

表10 不同負載下軸承故障診斷準確率Tab.10 Accuracy of bearing fault diagnosis under different loads
為了展示每個類別的分類精度,本文計算了遷移任務E+F→G+H的分類混淆矩陣。由圖9可見,模型對于外圈故障和正常狀態的誤分類是影響故障診斷準確率的主要原因。在其余的遷移任務中,也是如此。這主要是由于試驗噪聲和干擾的影響,不同工況下外圈故障和正常狀態的特征較為相似,導致特征產生了混疊,進而引起誤分類。盡管如此,故障診斷的平均準確率仍為97.22%,達到了較高的診斷精度。證實了本文方法在實際工程信號上的實用性。

圖9 驗證試驗分類混淆矩陣Fig.9 Classification confusion matrix of validation test
4 結 論
針對在多工況多目標域滾動軸承故障診斷場景中,傳統的無監督領域自適應方法適用性較弱的問題,本文提出了一種基于多源域自適應殘差網絡的滾動軸承故障診斷方法。該方法以ResNeXt作為主干網絡,并且引入局部最大均值差異準則LMMD,以兩個源域的子域為基礎對齊目標域中的相關子域,從而有效減小子域間和全局域間的分布差異。在CWRU標準軸承數據集,選取5種現有代表性的方法進行對比試驗,本文方法在對比試驗中表現出最好的結果,證明了該方法的有效性和優越性。在MFS軸承真實振動數據上進行算法實際驗證,證明了該方法在實際工程信號上的實用性。本文方法對于實際工業中的滾動軸承故障診斷具有一定的應用價值。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31