基于無人機LiDAR的道路勘測DEM構(gòu)建研究
2024-05-27 13:58:13宋冬冬
科技資訊 2024年1期
宋冬冬
關(guān)鍵詞: 濾波 LiDAR 無人機 DEM 構(gòu)建
中圖分類號: U412.2 文獻標識碼: A 文章編號: 1672-3791(2024)01-0022-04
在當前道路建設(shè)不斷新增的大環(huán)境下,道路建設(shè)行業(yè)必須提高工作效率,優(yōu)化工藝技術(shù)、縮短建設(shè)周期。機載LiDAR(Light Detection And Ranging)是近年來發(fā)展較快的一種新型對地觀測技術(shù),其將激光測距、計算機控制以及慣性測量等技術(shù)融為一體,利用無人機、有人機等搭載設(shè)備,實現(xiàn)非接觸、遠距離、高效率對地面點云數(shù)據(jù)采集[1]。數(shù)字高程模型(Digital ElevationModel,DEM)作為重要的基礎(chǔ)地理數(shù)據(jù)之一,已經(jīng)成為國家經(jīng)濟發(fā)展、全球戰(zhàn)略實施的核心,而隨著空間數(shù)據(jù)應用的不斷擴大,如何快速獲取高精度的DEM 數(shù)據(jù)已經(jīng)成為測繪行業(yè)的熱點問題。傳統(tǒng)的DEM 主要依靠數(shù)字化地形圖或者空中三角立體測量技術(shù)。前者需要外業(yè)采集大量地形數(shù)據(jù),一般使用RTK(RealTime Kinematic)進行外業(yè)數(shù)據(jù)采集,耗時耗力,并且對于復雜區(qū)域,人工無法到達,將導致部分DEM 數(shù)據(jù)缺失;后者包括航空攝影、攝影處理、地面測量(空中三角測量)、立體測量和制圖生產(chǎn)等過程,生產(chǎn)周期長,難以適應當前信息化社會需求。作為新型的對地觀測技術(shù),機載LiDAR 為DEM 獲取提供了一種全新的技術(shù)手段,由于其能夠準確地獲取地物的三維坐標,具有航空攝影測量和地面常規(guī)測量的綜合優(yōu)勢[2],因此能夠?qū)碗s的地形(地貌)精確、形象地展示出來。
DEM 作為數(shù)字模型數(shù)據(jù)可以利用計算機快速獲取道路勘測中的縱橫斷面,解決當前道路勘測中縱橫斷面生成的繁瑣問題,同時DEM 作為一類3D 數(shù)據(jù),可以直觀地顯示地形、地勢、地貌,為道路建設(shè)中的可視化分析、道路選線、土方量計算等提供重要的數(shù)據(jù)支撐。而無人機LiDAR 技術(shù)和單波束測深技術(shù)相比于傳統(tǒng)測量技術(shù)有著精度高、速度快、獲取數(shù)據(jù)量大、自動化程度高等優(yōu)點,采用無人機LiDAR 技術(shù),可以大大提高地形數(shù)據(jù)的獲取效率,解決當前道路勘測對海量高精度地形數(shù)據(jù)的強烈需求[3]。
1 無人機LiDAR 點云數(shù)據(jù)獲取
1.1 無人機LiDAR 外業(yè)測量
本文利用無人機LiDAR 技術(shù)獲取實驗區(qū)地形數(shù)據(jù),測量面積約5.65×105 m2。利用無人機LiDAR 技術(shù)外業(yè)采集數(shù)據(jù)流程主要包括:(1)實驗區(qū)環(huán)境資料收集;(2)航飛設(shè)計;(3)架設(shè)基站;(4)飛行前調(diào)試;(5)激光掃描儀工作;(6)慣性導航系統(tǒng)工作;(7)數(shù)碼成像系統(tǒng)工作;(8)導出數(shù)據(jù)。
1.2 外業(yè)數(shù)據(jù)處理
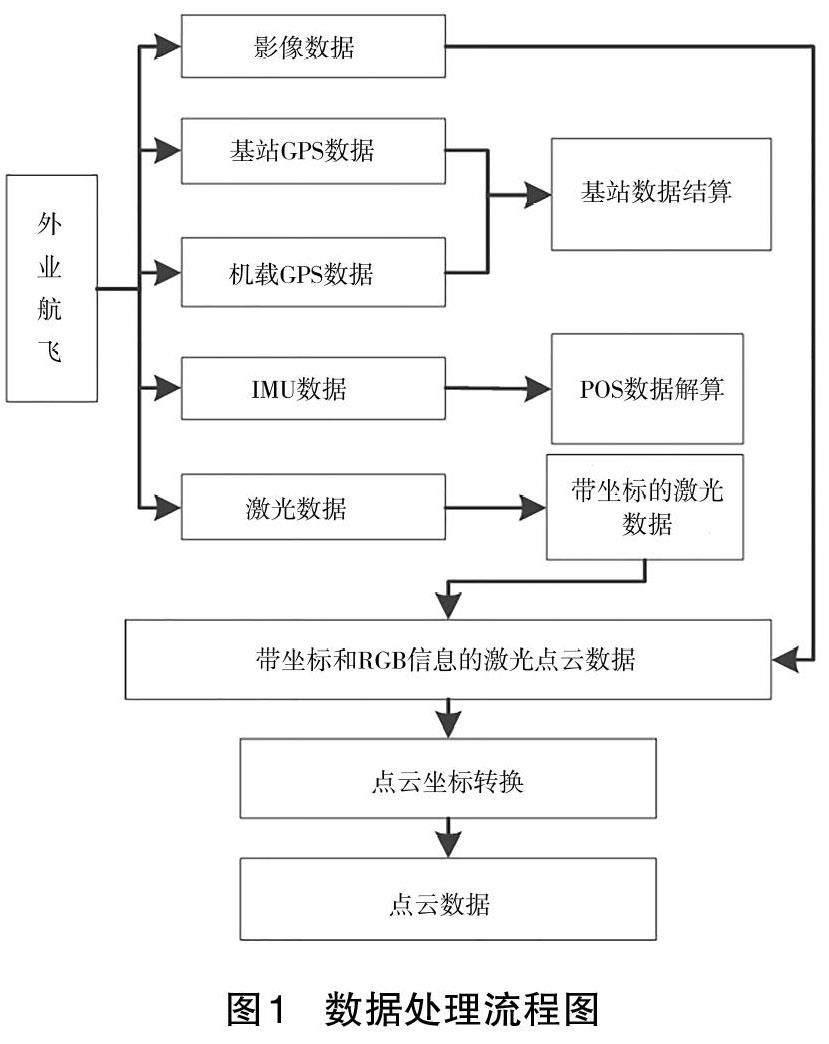
為了生成實驗區(qū)的點云數(shù)據(jù),還需對無人機Li‐DAR 外業(yè)采集數(shù)據(jù)進行進一步處理。其主要處理工作有基站數(shù)據(jù)結(jié)算、POS 數(shù)據(jù)解算、影像數(shù)據(jù)融合、點云坐標轉(zhuǎn)換等[4]。數(shù)據(jù)處理流程如圖1 所示。
1.3 點云數(shù)據(jù)去噪處理
獲得點云數(shù)據(jù)后,在對點云數(shù)據(jù)進行相關(guān)處理應用前,必須先進行去噪處理。無人機LiDAR 掃描作業(yè)過程中非常容易受到各種因素的干擾,產(chǎn)生各種各樣的噪點,此類噪點往往突兀于正常點云數(shù)據(jù)。為獲得更準確的激光數(shù)據(jù),需要進行點云去噪處理[5]。
1.4 無人機LiDAR 點云數(shù)據(jù)獲取結(jié)果
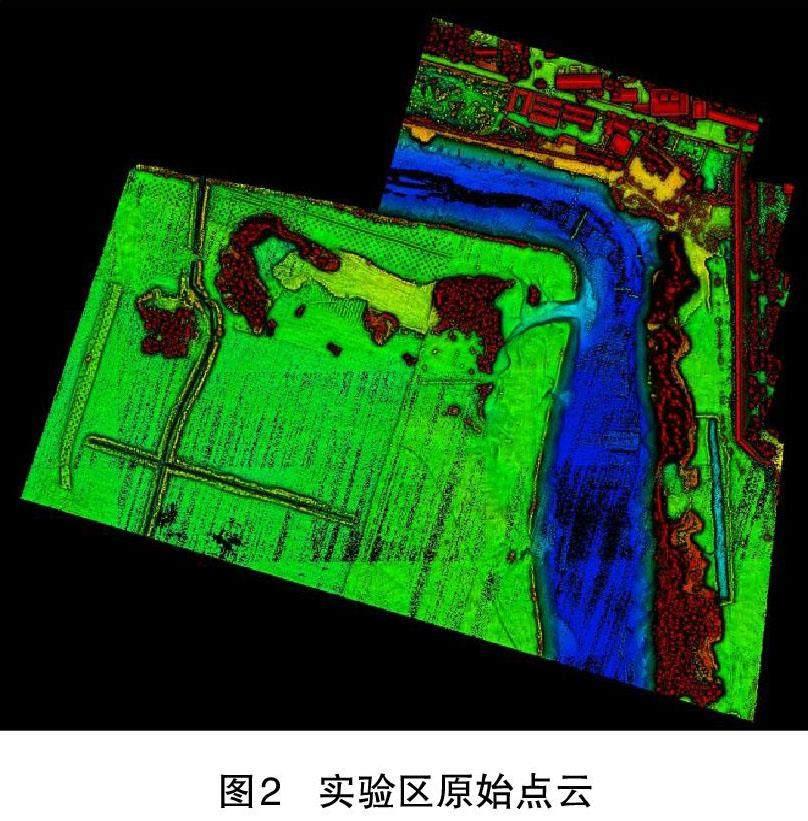
本文利用廣州市某港口區(qū)域獲取的點云數(shù)據(jù)來構(gòu)建DEM,其覆蓋面積約為5.65×105 m2,含有激光雷達點約3.72×107個,點云平均密度為65.791 per/m2,點的間距在0.01~0.18 m 之間,實驗區(qū)最小高程為+0.568 m,最大高程為+38.159 m。原始點云如圖2 所示。在實驗區(qū)中河西的沙灘區(qū)只有一些挖機、吊車等施工車輛和一些生長在沙土中較稀疏的低矮灌木叢,其余地物類型較少;在河東的生活區(qū)內(nèi)包括較多低矮密集的植被、路旁的行道樹、廠房建筑物、低矮棚戶區(qū)、廟宇、輸電塔和電線、防風墻等地物。
2 點云數(shù)據(jù)濾波
在構(gòu)建DEM 之前,須進行點云數(shù)據(jù)濾波去除掉不用的地物點數(shù)據(jù)。濾波的效果越好,構(gòu)建的DEM 精度就越高[6]。本文選用數(shù)學形態(tài)學濾波、布料模擬濾波和三角網(wǎng)迭代濾波來進行對比實驗。
2.1 數(shù)學形態(tài)學濾波結(jié)果
根據(jù)實驗區(qū)點云數(shù)據(jù)地形地物實際情況,本次數(shù)學形態(tài)學設(shè)置的格網(wǎng)分辨率大小為0.2,采取線性增加濾波窗口,初始窗口尺寸為3 m,最大窗口尺寸大小為35 m,地形斜率為0.3,初始高差閾值為0.5 m,最大高差閾值為2 m。
2.2 布料模擬濾波結(jié)果
布料模擬濾波算法進行濾波時需要設(shè)置5 個參數(shù),分別是格網(wǎng)分辨率、高差閾值、最大迭代次數(shù)、布料硬度和坡度后處理。格網(wǎng)分辨率就是布料格網(wǎng)的大小,設(shè)置過小,則布料模擬粒子數(shù)就會過多,會導致計算量過大,設(shè)置過大則會導致布料格網(wǎng)過于粗糙,會將很多點云的屬性誤判。原則上格網(wǎng)分辨率應和點云密度相當或者是點云密度的2~3 倍,文章設(shè)置為0.3 m。高差閾值是用來判斷將距離模擬布料多高的點判定為地面點的依據(jù),文章設(shè)置為0.2 m。最大迭代次數(shù),布料質(zhì)子運動次數(shù)達到最大迭代次數(shù)時將會停止布料模擬,文章將迭代次數(shù)設(shè)置為500。布料硬度可以結(jié)合地形坡度的變化來確定布料剛性參數(shù)。一般來說,區(qū)域越平坦,則RI 值需要越大;反之,區(qū)域越陡峭,RI 值需要越小。本文將RI 值設(shè)置為2。坡度后處理是一個可開關(guān)選項,當?shù)匦屋^陡峭時,需要進行坡度后處理;當?shù)匦屋^平坦時,則不需要進行坡度后處理。本文對實驗對象開啟了坡度后處理。
2.3 三角網(wǎng)迭代濾波結(jié)果
三角網(wǎng)迭代濾波算法主要參數(shù)有最大建筑物尺寸、最大地形坡度、迭代角度和迭代距離。每個格網(wǎng)中都需要有一個地面點作為種子點,所以最大的格網(wǎng)尺寸需要大于等于點云中最大建筑物尺寸。根據(jù)測區(qū)實際情況,設(shè)置最大建筑物尺寸為35 m。最大地形坡度是改變地形地貌所允許的最陡坡度,以實際情況為準,設(shè)置其為88°。迭代角度和迭代距離,待定點到三角網(wǎng)的角度和距離是否在迭代角度和迭代距離閾值范圍內(nèi),將決定其能否被分為地面點并加入三角網(wǎng)中。本文設(shè)置迭代角度為20°,迭代距離為0.5 m。
3 濾波精度評價
3.1 評價指標
本文以廣泛使用的點云濾波評價指標對實驗成果進行定量分析,其中主要有Ⅰ類誤差、Ⅱ類誤差和總誤差這3 個誤差評價指標。Ⅰ類誤差表示錯分地面點占總地面點的比例;Ⅱ類誤差表示錯分非地面點占總非地面點的比例;總誤差表示總的錯分點占總點的比例。
3.2 對比分析
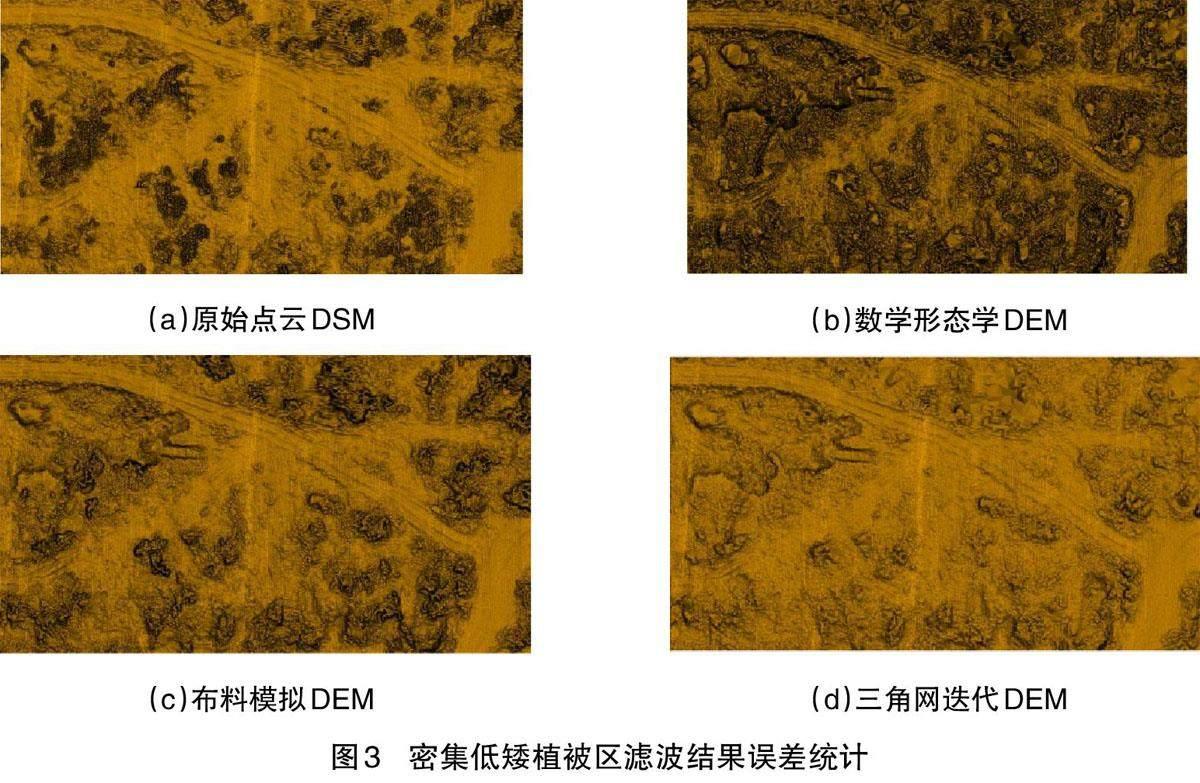
本文為比對數(shù)學形態(tài)學濾波、布料模擬濾波、三角網(wǎng)迭代濾波這3 種濾波算法對不同地區(qū)的適應性,選取了實驗區(qū)中廠房、密集低矮植被、防風堤和行道樹、帶有零散植被的小沙丘等8 個具有不同地形特征和土地利用類型的樣本區(qū)域進行濾波精度評定。其參考數(shù)據(jù)是根據(jù)測區(qū)的航攝影像輔助進行人工分類所獲得的。下面以密集低矮植被為例進行對比說明。具體情況如圖3 和表1 所示。
根據(jù)圖3 和表1 所示,在密集低矮植被區(qū),3 種濾波的Ⅰ類誤差都較小,沒有明顯的丟失地形現(xiàn)象。3種濾波的Ⅱ類誤差都較大,出現(xiàn)明顯的將部分低矮植被歸為地面點的現(xiàn)象。其主要原因是密集低矮植被的枝葉過于密集,激光沒有穿透植被,得到的植被點下沒有地面點,只有一層植被點。對于這類點,3 種濾波方法只能靠其與周邊地面點的高差來進行濾除,低矮植被本身就矮,然而部分低矮植被點與周邊地面點的高差在閾值范圍內(nèi),導致3 種濾波都難以將這類點濾除。其中,由于三角網(wǎng)迭代濾波除了高差閾值外還有一個角度閾值,對這類點的濾除效果比其他兩種濾波更好,這使得其Ⅱ類誤差是3 種濾波中最小的。從總誤差來看,在本區(qū)域三角網(wǎng)迭代濾波較好于其他兩種濾波。
4 無人機LiDAR 點云數(shù)據(jù)的DEM 構(gòu)建
點云數(shù)據(jù)濾波完后得到地面點數(shù)據(jù)依舊屬于離散數(shù)據(jù),同時濾波完后,部分區(qū)域還會出現(xiàn)空洞現(xiàn)象。所以,需對地面點數(shù)據(jù)進行內(nèi)插生成DEM。考慮效率和精度因素,本文選用線性三角網(wǎng)插值法來為點云構(gòu)建DEM。
4.1 點云構(gòu)建DEM
由于點云的數(shù)據(jù)量大,本文首先是利用地面點云構(gòu)建了TIN,然后將TIN 內(nèi)插生成柵格DEM。TIN 是通過利用地面點數(shù)據(jù)構(gòu)建不斷連續(xù)的不規(guī)則三角面,以逼近真實地形。TIN 能夠降低多余數(shù)據(jù)沉積,提高地形模擬的精度。實驗區(qū)的TIN 模型局部圖如圖4所示。
生成TIN 后,由于地面點數(shù)據(jù)密度夠大,要生成的DEM 中的每一像元都能有地面點數(shù)據(jù)對應,所以對TIN 進行線性內(nèi)插就能生成逼近真實地貌的DEM。本文激光雷達點約3.72×107個,數(shù)據(jù)量大,線性三角網(wǎng)插值法有較快的插值速度,誤差低,能有效提高構(gòu)建DEM 的效率。生成DEM 如圖5 所示。
4.2 DEM 精度評價
為檢核DEM 的精度,在實驗區(qū)范圍,利用GPSRTK測取檢核點,這些檢核點應均勻分布于實驗區(qū)內(nèi),數(shù)量適當。將DEM 與檢核點高程值對比,評價其精度。采用中誤差、平均絕對誤差、平均誤差作為數(shù)值指標。計算結(jié)果表明:DEM 的高程中誤差為0.024 m,最大高程差為0.050 m,滿足1∶500 地形圖高程精度要求。
5 結(jié)語
本文采用數(shù)學形態(tài)學濾波算法、布料模擬濾波算法和三角網(wǎng)迭代濾波算法3 種云算法對點云數(shù)據(jù)進行濾波,并對濾波結(jié)果進行精度評價和對比分析。采用線性三角網(wǎng)插值法對濾波后點云進行插值,生成DEM,并利用檢核點法對其進行精度評價。
猜你喜歡
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
現(xiàn)代經(jīng)濟信息(2016年19期)2016-10-20 15:57:03
中國科技博覽(2016年19期)2016-10-19 12:39:29
科技視界(2016年22期)2016-10-18 14:30:27
科學與財富(2016年28期)2016-10-14 00:42:15
大學教育(2016年9期)2016-10-09 08:38:54
成才之路(2016年26期)2016-10-08 12:01:17
成才之路(2016年25期)2016-10-08 10:30:56
企業(yè)導報(2016年9期)2016-05-26 20:58:26