真空泵用屏蔽電機無傳感器殘壓重投控制策略
2024-05-30 00:00:00安躍軍初佰慧安輝陸艷君鄧文宇齊麗君李明
電機與控制學報 2024年2期

摘 要:
針對真空干泵機組故障、生產工藝需要等原因影響真空設備產線在線運行時間的問題,研究真空干泵用屏蔽式感應電機帶速重投策略,尋求重投的有利時刻以保證帶速重投的成功,對電機斷電后的轉速和定子失電殘壓特性展開研究。為此,根據屏蔽感應電機空間向量模型,建立基于電壓電流混合磁鏈觀測的無速度傳感器估算模型、推導電機斷電期間的轉速估算方法以及定子失電殘壓解析式。通過重點研究定子殘壓和虛擬重投電壓間幅值特性和相角特性,確定控制系統的首次重投點和其次重投點。以4 kW真空干泵用屏蔽感應電機機組為例,通過模型仿真和失電殘壓實驗驗證了該控制方法在泵類工程中有較好的適用性和準確性,重投階段的轉速穩定時間為0.5 s以內,重投階段的沖擊電流平均減小59.18%。
關鍵詞:真空干泵;屏蔽電機;帶速重投;定子失電殘壓;無速度傳感器;失電殘壓實驗
DOI:10.15938/j.emc.2024.02.011
中圖分類號:TM301.4
文獻標志碼:A
文章編號:1007-449X(2024)02-0110-10
收稿日期: 2022-08-31
基金項目:遼寧省\"揭榜掛帥\"科技重大專項(2022JH1/10400038)
作者簡介:安躍軍(1962—),男,博士,教授,博士生導師,研究方向為特種電機及其控制;
初佰慧(1991—),男,碩士,研究方向為特種電機控制;
安 輝(1989—),男,碩士,高級工程師,研究方向為特種電機及其控制;
陸艷君(1990—),女,碩士,工程師,研究方向為永磁材料與芯片制備;
鄧文宇(1982—),男,學士,正高級工程師,研究方向為永磁體制備技術;
齊麗君(1981—),男,碩士,高級工程師,研究方向為稀土永磁材料制備;
李 明(1987—),男,博士,講師,研究方向為特種電機及其控制。
通信作者:安躍軍
Residual voltage restart control strategy with sensorless of canned motor for vacuum dry pump
AN Yuejun1, CHU Baihui1, AN Hui1, LU Yanjun2, DENG Wenyu3, QI Lijun3, LI Ming1,4
(1.School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China;
2.Shenyang KINGSEMI Co., Ltd., Shenyang 110168, China; 3.Shenyang China North Vacuum Equipment Co., Ltd., Shenyang 110159, China; 4.College of Control Science and Engineering, Bohai University, Jinzhou 121013, China)
Abstract:
To discuss the problem that the on-line running time of the vacuum equipment production line is affected by the failure of vacuum dry pump unit and the need of production process, it is very significant to study the strategy of restarting at unknown speed of the canned induction motor for vacuum dry pump. In order to find the optimal moment of restarting and ensure the success of restarting at unknown speed, it is necessary to study the speed of motor and the stator residual voltage characteristics after the power off. Therefore, according to the space vector model of canned induction motor, a speed sensorless speed estimation model based on flux observation of voltage-current hybrid rotor was established, and the speed estimation method during the power off and the analytical formula of stator residual voltage after power off were deduced. By focusing on the amplitude and phase-angle characteristics between the stator residual voltage and the virtual reinput voltage, the first and the secondary restart points of the control system were determined. Taking the canned induction motor unit for 4 kW vacuum dry pump as an example, through model simulation and power-off residual voltage experiment, the good applicability and accuracy of the control method in pump engineering were verified, the speed stability time is less than 0.5 s, and the impact current decreases by 59.18% on average.
Keywords:vacuum dry pump; canned motor; restarting at unknown speed; stator residual voltage; speed-sensorless; power-off residual voltage experiment
0 引 言
隨著我國半導體行業、裝備制造業、薄膜工業、化工產業、液晶顯示器等行業的快速發展,真空技術在行業發展中的應用也越來越廣泛,同時各行業對極限真空度的要求也越來越嚴格[1]。目前常使用由屏蔽電機、羅茨泵等組成的真空系統來獲取真空環境,屏蔽電機因其體積小、能耗低、極限真空度好等優點,逐漸成為獲得真空環境的核心設備[2]。
在真空系統工程中,常因真空泵間歇性故障或工藝流程需要等原因導致真空泵系統發生直排大氣現象,造成電機負載突增,過大的沖擊負載會使屏蔽電機過載停機,設備真空度將不能維持,為減少因真空度破壞造成過大的經濟損失,需要斷電后屏蔽電機仍處于高轉速狀態,盡快重新投入工作。如果在電機斷電后直接重新投入電源,勢必會產生較大的沖擊轉矩和沖擊電流[3];如果等斷電后電機轉速降至0,真空系統的真空度將難以保證。因此,在真空干泵用屏蔽電機斷電后,實現快速、平穩、低沖擊的帶速重投具有重要的工程意義[4]。
對于感應電機的帶速重投控制問題,國內外學者進行了一些相應研究。文獻[5]對感應電機采用d軸直流電流注入法,以q軸電流振蕩周期估計電機重投初始轉速,該方法估算轉速所需時間過長。文獻[6]分析了感應電機定子殘壓產生原理,討論了電源與剩余電壓之間的相位差對重新啟動瞬態的影響。文獻[7]通過采取殘壓相位校正與電流滯環配合重投方法,減小了重投時的定子電流,保證了重投成功。文獻[8]運用波波夫穩定性理論建立了全階自適應觀測器無速度傳感器控制系統,采用中心向兩側檢索方法估算初始重投轉速,保證了重投勵磁成功。文獻[9-10]將轉子反電動勢非線性模型輸入輸出線性化與無速度傳感器矢量控制相結合,簡單實現了重投系統的設計。然而,上述研究方法中理論和仿真分析利用的電機數學模型階數較高,不利于運算;轉子反電動勢的非線性模型未考慮定子電流而導致數學模型不精準,進而可能會導致重投失敗。重合閘的控制方法裝置復雜,沒有充分利用定子殘壓來減小瞬態沖擊電流和瞬態沖擊轉矩,未能很好地解決電機的斷電帶速重投問題。
本文首先根據屏蔽式感應電機的特殊結構建立電機的空間向量法模型,設計基于電壓電流混合磁鏈觀測的模型參考自適應(model reference adaptive system, MRAS)轉速估算策略。在此基礎上,對屏蔽感應電機失電后定子殘壓、斷電轉速進行理論分析和解析式推導,提出利用虛擬重投電壓源替代斷電后原控制系統輸出電壓的方法,運用殘壓比較控制器中的希爾伯特變換(Hilbert)函數,對失電殘壓和虛擬重投電壓間的電壓差和相角差特性進行分析,據此確定首次重投點及其次重投點,并通過軟件仿真及4 kW樣機失電殘壓實驗,驗證無速度傳感器殘壓差控制策略的準確性和工程實用性。
1 真空泵屏蔽電機斷電處理方法及空間向量法模型
1.1 定子繞組斷電過程處理方法
屏蔽感應電機斷電時,瞬態熄弧過程錯綜復雜,目前對斷電過程常采用3種處理方法[11]:
1)認為電源斷開時,定子三相繞組同時斷開,即定子三相電流立刻為0。這種處理方法最簡單,但與屏蔽電機斷電實際工程情況有些差別。
2)認為電源斷電時,定子三相電流不立即變為0,而是以指數規律逐漸衰減至0。這種方法雖然接近實際工況,但衰減時間難以確定,工程實用性較差。
3)認為電源斷電時,在某相電流過零時該相定子電流先關斷。隨后,其余兩相電流于過零處再同時關斷。這種方法更貼近實際斷電過程,但電機三相定子繞組瞬態關斷過程較復雜,涉及三相對稱、兩相不對稱及三相定子完全斷電狀態,難以建立適合工程穩態分析的瞬態斷電期間的數學模型。
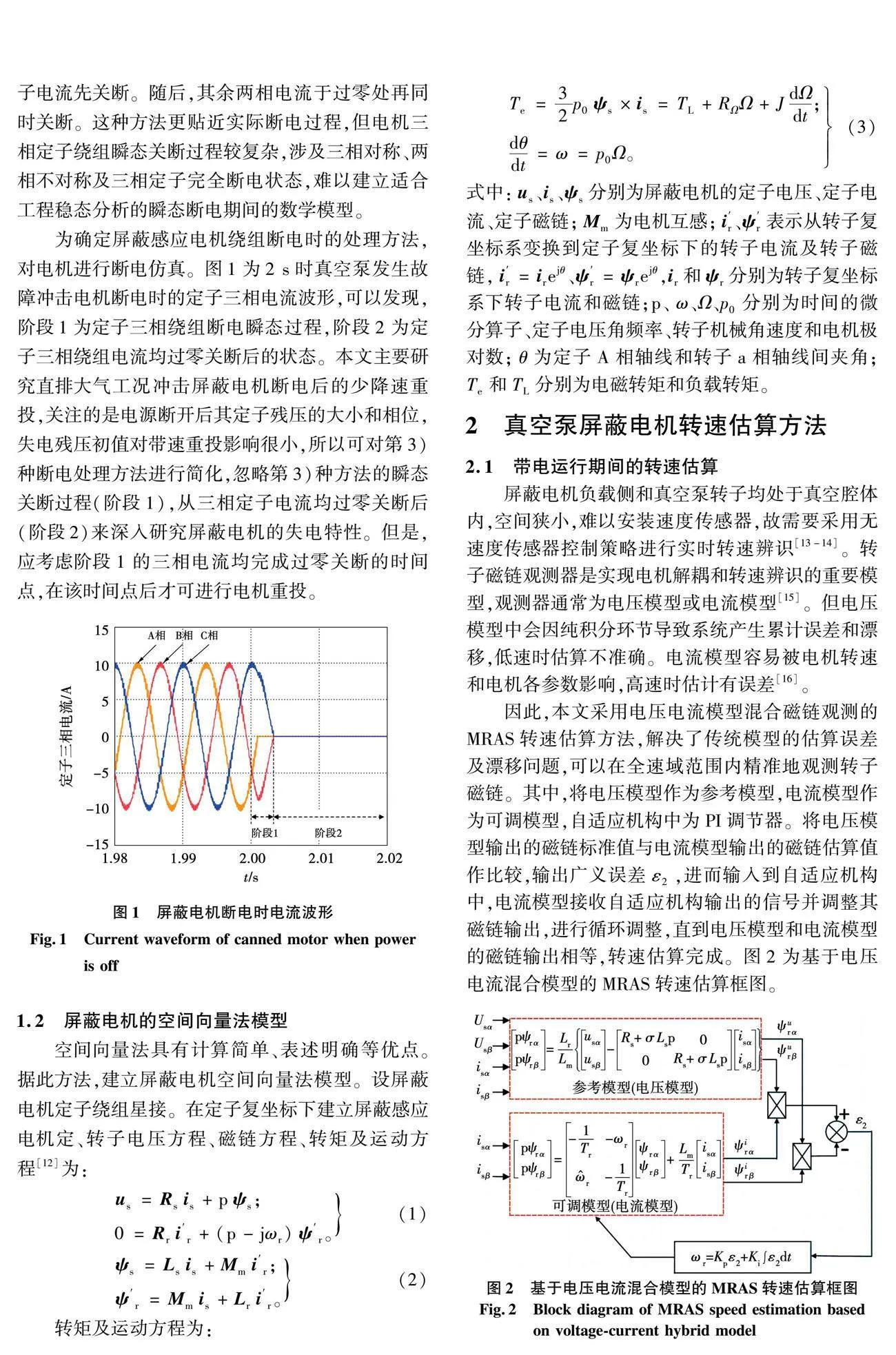
為確定屏蔽感應電機繞組斷電時的處理方法,對電機進行斷電仿真。圖1為2 s時真空泵發生故障沖擊電機斷電時的定子三相電流波形,可以發現,階段1為定子三相繞組斷電瞬態過程,階段2為定子三相繞組電流均過零關斷后的狀態。本文主要研究直排大氣工況沖擊屏蔽電機斷電后的少降速重投,關注的是電源斷開后其定子殘壓的大小和相位,失電殘壓初值對帶速重投影響很小,所以可對第3)種斷電處理方法進行簡化,忽略第3)種方法的瞬態關斷過程(階段1),從三相定子電流均過零關斷后(階段2)來深入研究屏蔽電機的失電特性。但是,應考慮階段1的三相電流均完成過零關斷的時間點,在該時間點后才可進行電機重投。
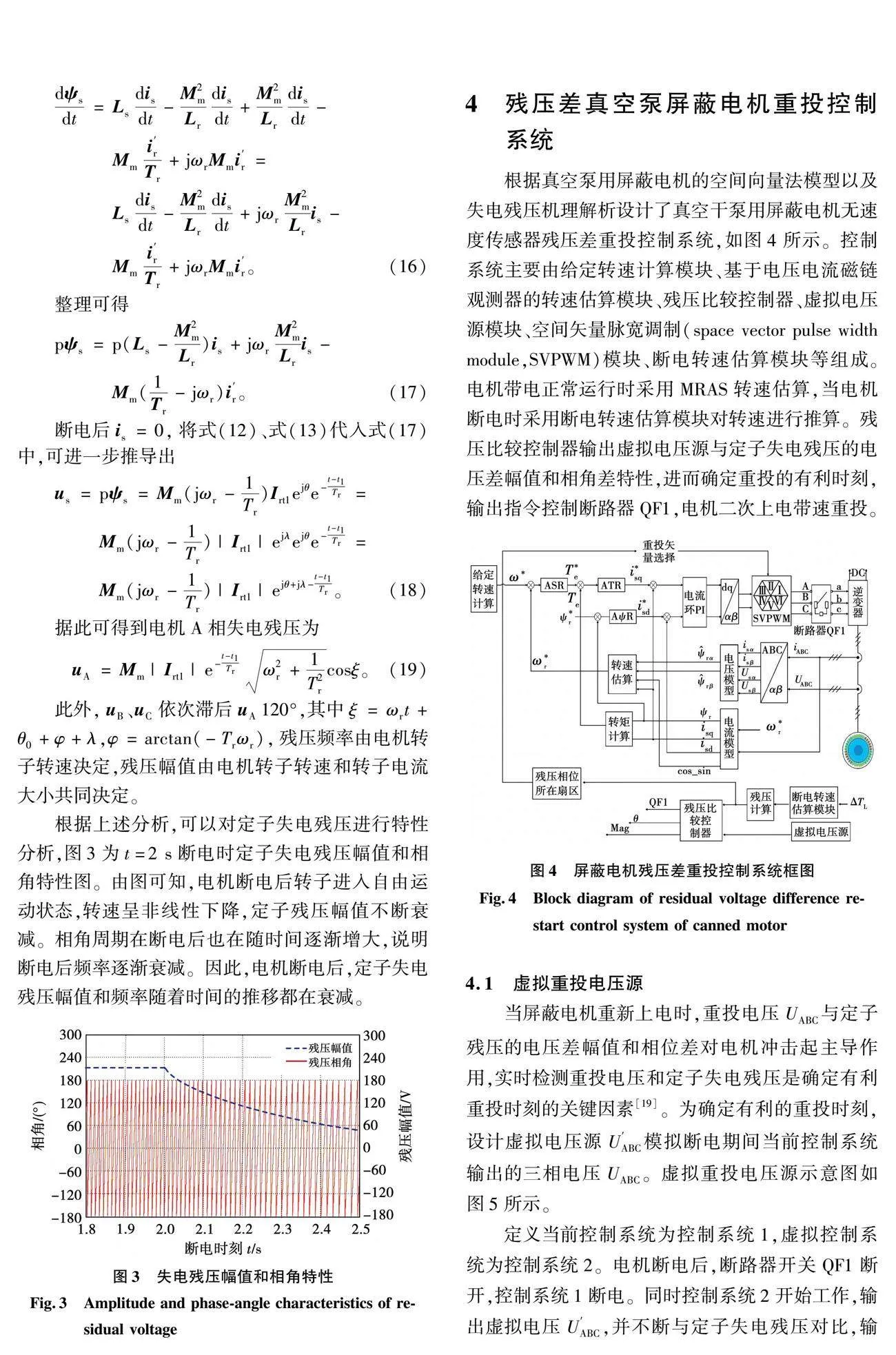
4 殘壓差真空泵屏蔽電機重投控制系統
根據真空泵用屏蔽電機的空間向量法模型以及失電殘壓機理解析設計了真空干泵用屏蔽電機無速度傳感器殘壓差重投控制系統,如圖4所示。控制系統主要由給定轉速計算模塊、基于電壓電流磁鏈觀測器的轉速估算模塊、殘壓比較控制器、虛擬電壓源模塊、空間矢量脈寬調制(space vector pulse width module,SVPWM)模塊、斷電轉速估算模塊等組成。電機帶電正常運行時采用MRAS轉速估算,當電機斷電時采用斷電轉速估算模塊對轉速進行推算。殘壓比較控制器輸出虛擬電壓源與定子失電殘壓的電壓差幅值和相角差特性,進而確定重投的有利時刻,輸出指令控制斷路器QF1,電機二次上電帶速重投。
4.1 虛擬重投電壓源
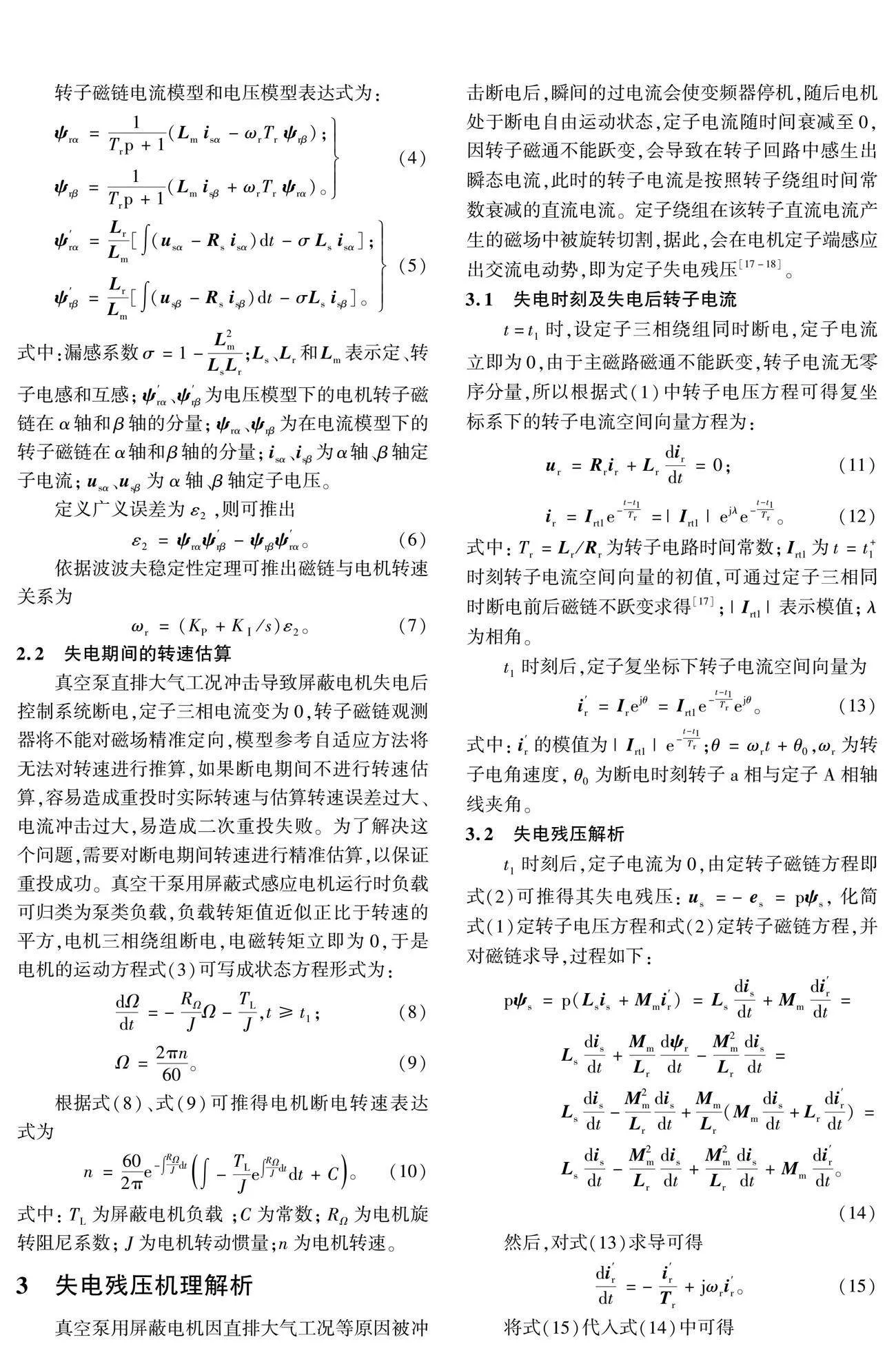
當屏蔽電機重新上電時,重投電壓UABC與定子殘壓的電壓差幅值和相位差對電機沖擊起主導作用,實時檢測重投電壓和定子失電殘壓是確定有利重投時刻的關鍵因素[19]。為確定有利的重投時刻,設計虛擬電壓源U′ABC模擬斷電期間當前控制系統輸出的三相電壓UABC。虛擬重投電壓源示意圖如圖5所示。
定義當前控制系統為控制系統1,虛擬控制系統為控制系統2。電機斷電后,斷路器開關QF1斷開,控制系統1斷電。同時控制系統2開始工作,輸出虛擬電壓U′ABC,并不斷與定子失電殘壓對比,輸出兩者幅值差和相角差,以此確定有利的重投時刻,控制斷路器QF1接通,進而控制系統恢復供電。
經過虛擬重投電壓源的電壓和定子失電殘壓實時比較,在殘壓比較控制器中進行計算,可得二者電壓差,然后運用希爾伯特變換(Hilbert)函數計算定子殘壓與重投電壓間幅值差和相角差,進而確定有利的重投時刻。
4.2 殘壓比較控制器
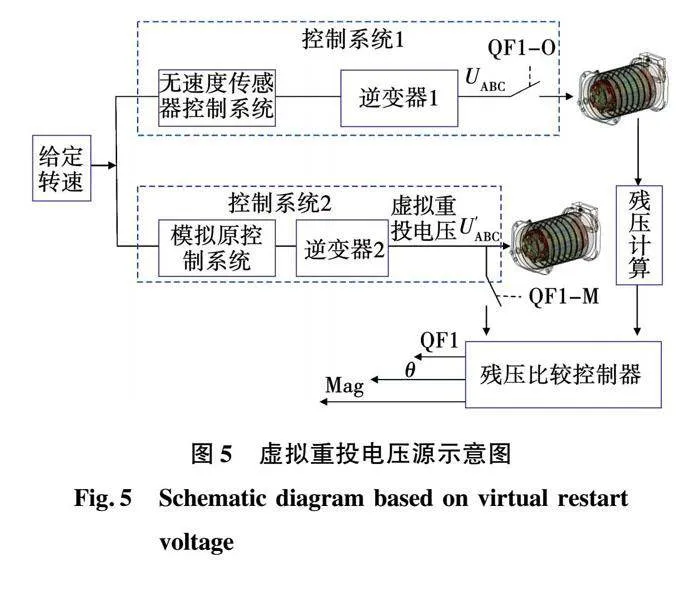
殘壓比較控制器中運用希爾伯特變換(Hilbert)函數,將模擬重投電壓與定子殘壓的電壓差作為目標函數,對非平穩信號的目標函數運用希爾伯特變換(Hilbert)計算出解析信號,將解析信號取模會得出包絡信號,然后再進行傅里葉變換,最終生成電壓差幅值Hilbert包絡譜,如圖6所示。
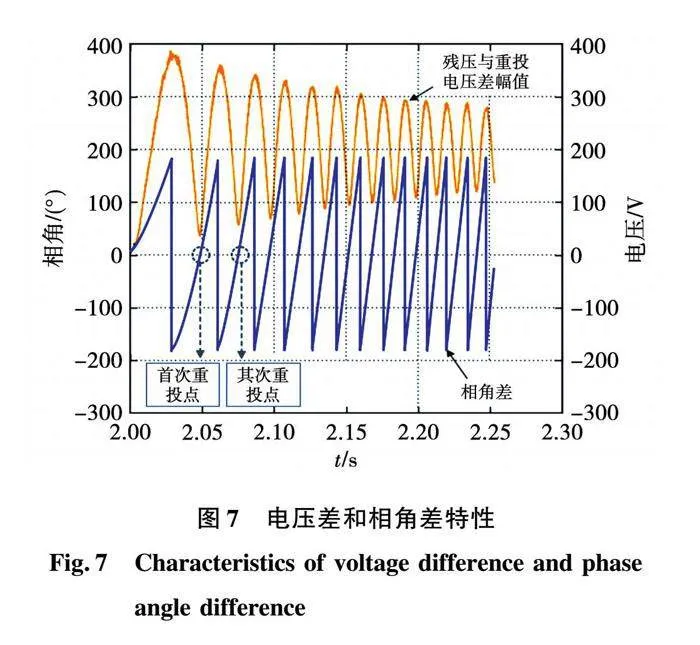
根據仿真計算的定子失電殘壓及虛擬重投電壓得出兩者電壓差幅值。對斷電時刻初期電壓差幅值的數據進行處理,并與斷電時相角差特性進行合并分析,可得電壓差和相角差特性如圖7所示,進而可確定有利的重投時刻。
由圖7可知,兩者電壓差幅值和相角差的變化可分為2個階段。第1階段:相角差從0逐漸增大到180°。當相角差為180°時,虛擬重投電壓和定子A相殘壓反向,電壓差幅值因此達到最大值,此時重投電源沖擊較大,不適合重投。第2階段:相角差由-180°逐漸變化到0,當相角差為0時,虛擬重投電壓和定子A相殘壓同相位,兩者電壓差幅值達到最小值,適合重投。隨著時間推移,兩者電壓差和相角差變化也越來越快,當電機A相殘壓衰減至0后,電壓差幅值和相角差為虛擬重投電壓幅值和相角,并按其幅值和頻率變化。
在圖7中第一次相角差為0時,電壓差幅值第一次達到最小,定義該點為首次重投點;在第二次相角差為0時,電壓差幅值第二次達到最小,定義該區域為其次重投點。電機斷電后,越快重投將越有利,可以選擇首次重投點進行重投,首次重投點若不能實現,可考慮在其次重投點重投。
5 實驗及仿真驗證
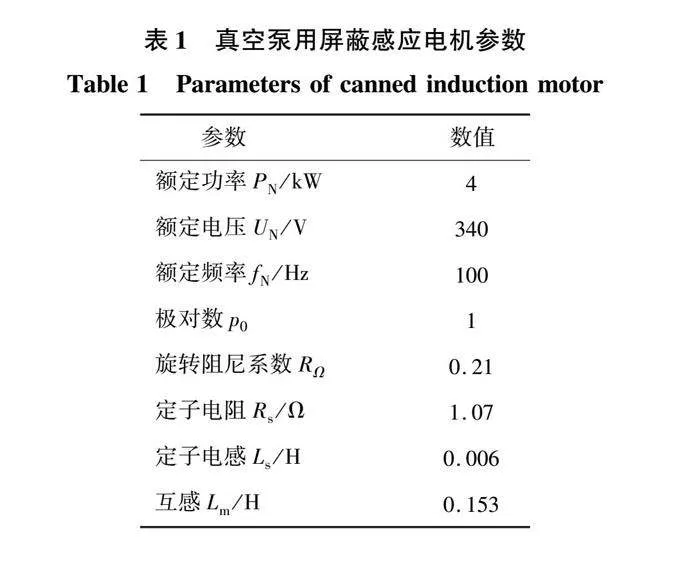
根據MathsWorks公司的MATLAB/Simulink軟件建立真空干泵用屏蔽式感應電機無速度傳感器殘壓差重投控制系統,利用4 kW屏蔽式感應電機機組實驗平臺對電機斷電后定子A相失電殘壓進行實驗測量,之后對殘壓差重投控制策略進行軟件仿真,驗證了屏蔽式感應電機殘壓差重投方法的可行性。屏蔽感應電機定子失電殘壓實驗平臺如圖8所示,屏蔽式感應電機參數見表1。
實驗裝置主要包括4 kW屏蔽式感應電機機組、磁粉制動器、磁粉控制器、示波器、轉矩轉速分析儀、功率分析儀、變頻器、水冷機、電流表、電壓表、控制柜等。變頻器設置電機額定頻率、電流保護、過載保護等。
5.1 屏蔽式感應電機殘壓實驗結果
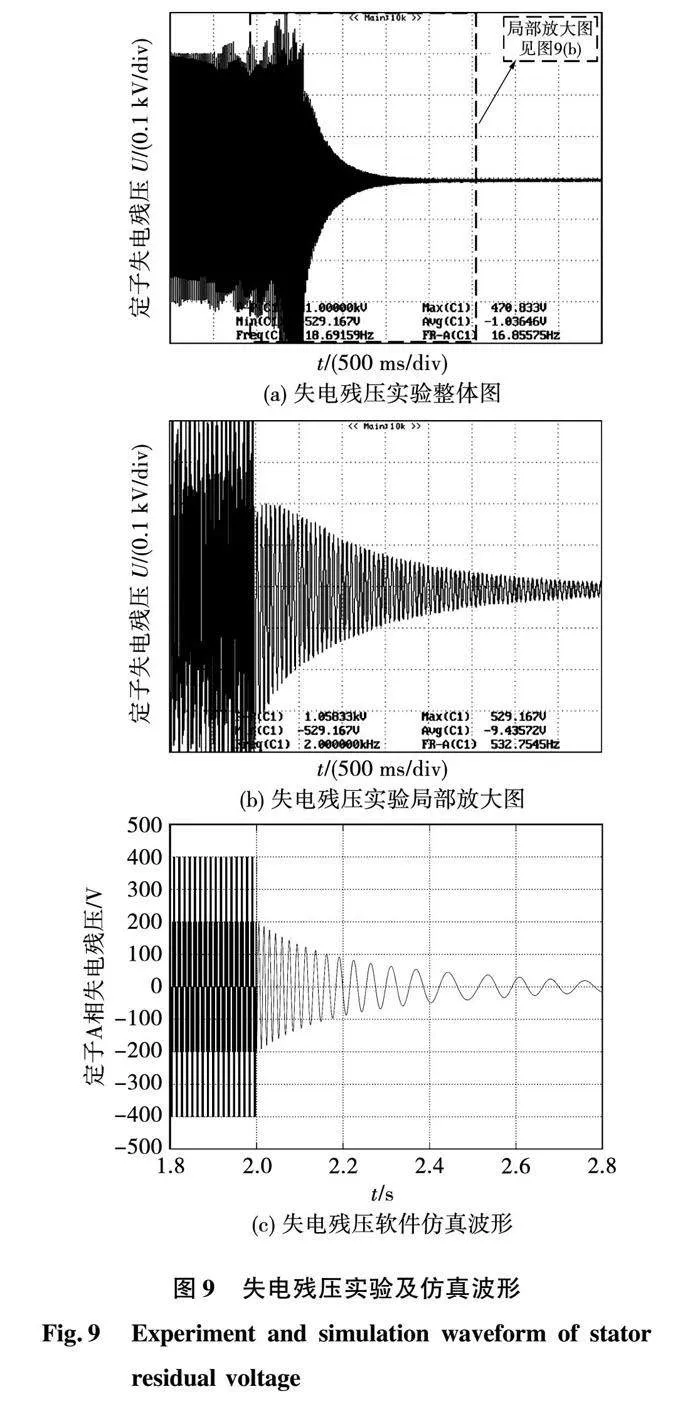
實驗前,調整電機與磁粉制動器的軸平行度及對中度,設置變頻器、功率分析儀以及轉矩轉速測量儀等參數,起動電機升頻至額定轉速6 000 r/min,待轉速穩定后,電機斷電,使用示波器測量電機A相定子繞組失電殘壓,殘壓實驗波形及放大圖如圖9(a)及圖9(b)所示。利用MATLAB/Simulink軟件,在2 s時進行屏蔽感應電機失電殘壓實驗,失電殘壓仿真波形如圖9(c)所示。
由圖9可以看出,斷電后定子A相失電殘壓幅值和頻率隨著時間的推移在逐漸減小。對比示波器實驗波形及軟件仿真波形,結果表明本文控制方法可以準確計算電機斷電后的定子失電殘壓,為殘壓差重投奠定了理論和實驗基礎。
5.2 殘壓差重投仿真實驗結果
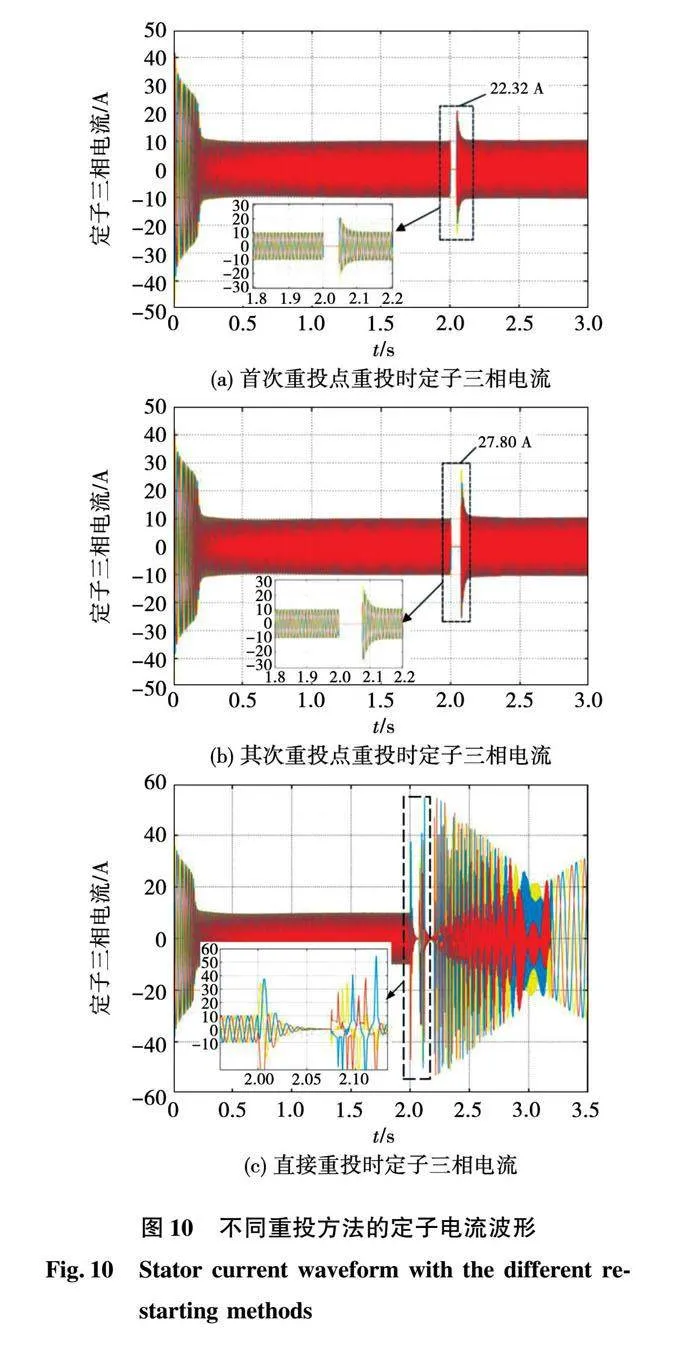
屏蔽感應電機穩定運行后,通過斷路器QF1控制電機的斷電,根據圖7確定的重投點,分別在首次重投點(t=2.047 s)、其次重投點(t=2.075 s)進行仿真驗證,可得2種重投方式下的定子三相電流仿真波形。同時在其次重投點(t=2.075 s)不采用殘壓差重投,而進行直接重投仿真,驗證殘壓差重投的可行性,波形如圖10所示。
由圖10可知,在首次重投點重投時,定子三相電流峰值大小為22.32 A;在其次重投點重投時,定子三相電流峰值大小為27.80 A;采用直接重投時,定子三相電流峰值大小為54.69 A,電流大且無規律波動。分析可知,在首次重投點重投較在其次重投點重投的殘壓和重投電壓差幅值更小,重投時電壓沖擊更小,所以重投時定子三相電流的峰值更小,而直接重投時,由于重投電壓相位和殘壓相位的耦合作用,導致重投失敗,引起持續的不穩定電流波動。因此,采用殘壓差重投的控制策略可以有效減小重投的沖擊電流,避免因電機定子電流過大導致變頻器沖擊關斷、重投失敗等問題的發生。
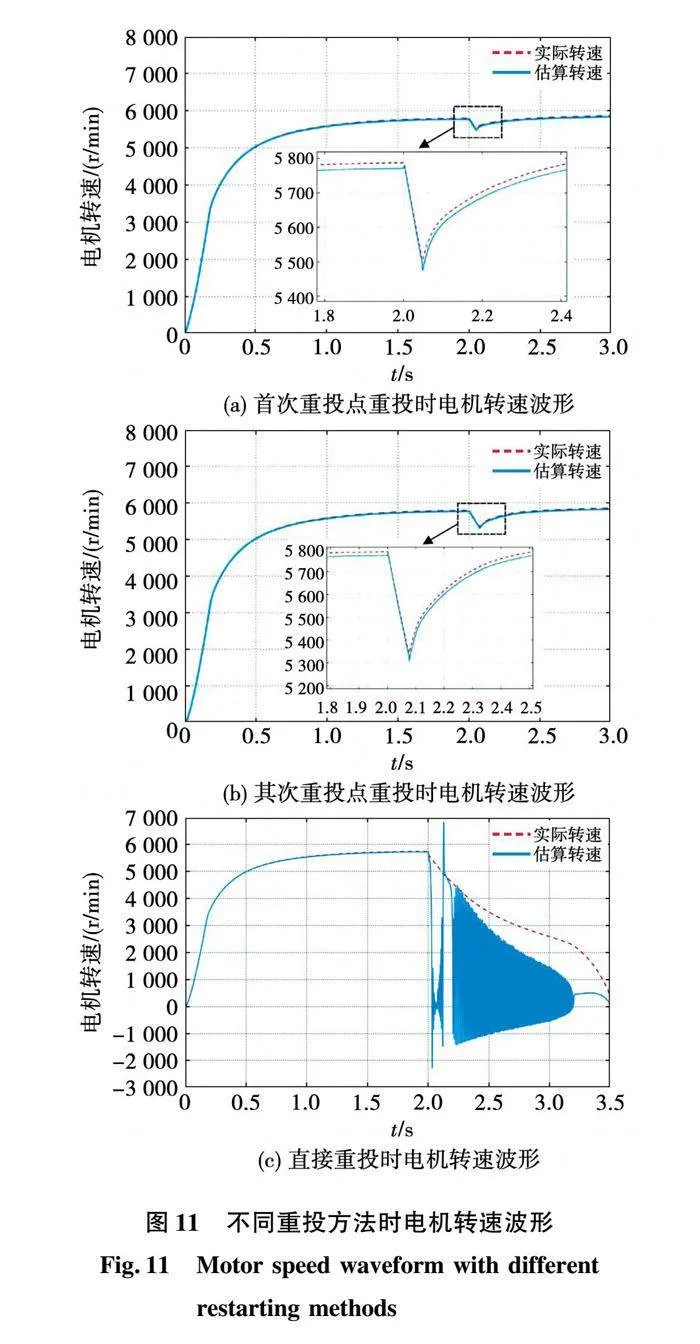
圖11為不同重投方式下的電機轉速波形,從圖11(a)和圖11(b)可以看出,在首次重投點重投時電機轉速降至5 500 r/min,在其次重投點重投時電機轉速降至5 350 r/min,越快重投,電機的轉速降低得越少,恢復至額定轉速所用的時間越短。用殘壓差重投控制方法,電機在帶電正常運行及斷電期間,轉速估算準確,重投時刻轉速波動小、達到額定轉速時間短。重投成功后推算轉速也能快速跟隨電機實際轉速,轉速穩定時間在0.5 s內,保證了帶速重投的成功。從圖11(c)可以看出,電機采用直接重投方法重投失敗。主要由于電機斷電后,定子電流變為0,MRAS的轉速估算將不再適用,磁鏈觀測器不能對磁場精準定向,不能準確地估算斷電轉速,重投時刻估算轉速遠小于電機實際轉速,使得電磁轉矩的性質為制動轉矩,電磁轉矩跌落,電流及轉速波動較大,導致電機重投失敗。
6 結 論
本文提出利用電機定子殘壓和虛擬重投電壓間的電壓差幅值和相角差特性確定帶速重投的有利時刻,設計了適用于真空干泵用屏蔽感應電機的無速度傳感器殘壓差重投控制系統。確定了帶速重投的首次重投區域、其次重投區域。
1)根據解析計算得到的定子殘壓和虛擬重投電壓確定了定子殘壓和重投電壓的電壓差幅值和相角差特性,進而判斷出適合屏蔽感應電機的首次重投點和其次重投點。
2)建立基于電壓電流混合模型的轉速估計策略,估算準確,對于大慣量交流電機如屏蔽電機、泵類負載電機等具有很好的適用性。
3)通過對4 kW屏蔽式感應電機機組進行斷電殘壓實驗,驗證了電機斷電后定子失電殘壓的存在以及所計算的失電殘壓的準確性。
4)通過Simulink仿真驗證了無速度傳感器殘壓差重投的控制策略能有效抑制重投時刻電流沖擊,重投階段的沖擊電流平均減小59.18%,重投階段的轉速穩定時間為0.5 s以內。為提高真空干泵用屏蔽式感應電機帶速重投提供了理論基礎。
參 考 文 獻:
[1] 鄧文宇, 齊麗君, 王光玉, 等.中國高端真空泵驅動電機及控制技術的現狀和發展[J].電機與控制應用,2020,47(7):1.
DENG Wenyu, QI Lijun, WANG Guangyu, et al. Present situation and development of drive motor and control technology for high-end vacuum pump in China [J]. Electric Machines and Control Application,2020,47(7):1.
[2] 馬義剛, 李智慧. 超高真空和高真空技術的應用[J]. 真空, 2021, 58(4): 98.
MA Yigang, LI Zhihui. Application of ultra-high and high vacuum technology [J]. Vacuum, 2021, 58(4): 98.
[3] YIN S B, XIA J H, ZHAO Z, et al. Fast restarting of free-running induction motors under speed-sensorless vector control[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 6124.
[4] 安躍軍, 張志恒, 張振厚, 等. 真空干泵用屏蔽電機無速度傳感器帶速重投控制系統[J]. 電工技術學報, 2018, 33(12): 2665.
AN Yuejun, ZHANG Zhiheng, ZHANG Zhenhou, et al. Restarting at unknown speed-sensorless control system of canned motor for vacuum dry pump[J]. Transactions of China Electrotechnical Society,2018,33(12):2665.
[5] IURA H, IDE K, HANAMOTO T, et al. An estimation method of rotational direction and speed for freerunning AC machines without speed and voltage sensor[J]. IEEE Transactions on Industry Applications, 2011,47(5):153.
[6] GABARAANE T, BARENDSE P S, KHAN A. Reclosing transients in standard and premium efficiency induction machines in the presence of voltage unbalance[C]//2006 IEEE Energy Conversion Congress And Exposition(ECCE),September 18-22,2016,Milwaukee, WI,USA.2016:1-7.
[7] 唐捷. 異步電機無速度傳感器 DTC系統帶速重啟動控制研究[J]. 科技創新與應用,2016(18):54.
TANG Jie. Asynchronous motor speed sensorless DTC system with speed reset control research[J]. Technology Innovation and Application, 2016(18): 54.
[8] 劉輝, 雷亞洲, 曾禮. 異步電機無速度傳感器帶速重 投策略[J]. 電機與控制應用, 2018,45(5): 1.
LIU Hui, LEI Yazhou, ZENG Li. Speed sensorless control and restarting at unknown speed of induction motor[J]. Electric Machines and Control Application,2018,45(5):1.
[9] FUJINAMI K, TAKAHASHI K, KONDO K. A restarting method of an induction motor speed-sensorless vector control system for a small-sized wind turbine power generator system[C]//2009 International Conference on Electrical Machines and Systems, November 15-18, 2009, Tokyo, Japan.2009:1320-1324.
[10] 茍立峰, 王琛琛, 游小杰, 等.基于積分滑膜的感應電機無速度傳感器帶速重投控制策略[J].電工技術學報, 2018,33(24):5700.
GOU Lifeng, WANG Chenchen, YOU Xiaojie, et al.A restart method based on integral sliding mode for speed sensorless controlled induction motor[J]. Transactions of China Electrotechnical Society,2018,33(24):5700.
[11] 崔學深, 張自力, 李和明, 等. 感應電機電源切換中殘壓和電壓差的研究及最優切換策略[J]. 電工技術學報,2015,30(2):162.
CUI Xueshen, ZHANG Zili, LI Heming, et al. Residual voltage, voltage difference and optimal switching strategy during the power switching of induction motors[J]. Transactions of China Electrotechnical Society,2015,30(2):162.
[12] 秦鑫, 安躍軍, 張志恒, 等. 化工泵用新型復合鼠籠結構屏蔽電機驅動性能及多物理場分析[J].電機與控制應用, 2020,47(5):3.
QIN Xin, AN Yuejun, ZHANG Zhiheng, et al. Driving performance and multiphysics analysis of new composite squirrel cage structure canned motor for chemical pumps[J]. Electric Machines and Control Application,2020,47(5):3.
[13] 安躍軍, 李明, 鄧文宇, 等.一種低渦流損耗高效屏蔽電泵: CN111614210B[P].2022.
[14] 安躍軍, 殷福久, 王光玉, 等.真空干泵屏蔽電動機溫度場與屏蔽套應力場分析[J].沈陽工業大學學報,2016,38(2):121.
AN Yuejun, YIN Fujiu, WANG Guangyu, et al. Analysis for temperature field and can stress field of vacuum pump canned motor[J]. Journal of Shenyang University of Technology,2016,38(2):121.
[15] 梁艷萍, 張廣超, 高蓮蓮, 等.核主泵驅動電動機屏蔽套渦流損耗混合算法研究[J].電工技術學報,2018,33(5):1015.
LIANG Yanping, ZHANG Guangchao, GAO Lianlian,et al. Research on hybrid algorithm of can losses in double canned induction motor for nuclear pump[J]. Transactions of China Electrotechnical Society, 2018,33(5):1015.
[16] 包廣清, 祁武剛. 基于MRAS的異步電機無速度傳感器應用研究[J]. 微特電機,2020,48(3): 43.
BAO Guangqing, QI Wugang. Application research of speed sensorless asynchronous motor based on MRAS[J]. Small amp; Special Electrical Machines,2020,48(3):43.
[17] 湯蘊璆, 王成元. 交流電機動態分析[M]. 北京:機械工業出版社,2015.
[18] 高吉增, 楊玉磊, 崔學深. 感應電動機失電殘壓的研究及其對重合過程的影響[J]. 電力系統保護與控制,2009,37(4):4.
GAO Jizeng, YANG Yulei, CUI Xueshen. The research of the residual voltage of induction motor after dumping and its influence during restoration[J]. Power System Protection and Control,2009,37(4):4.
[19] 高雅, 劉衛國, 駱光照. PMSM斷電-重投時的沖擊電流研究[J]. 電機與控制學報,2017,21(3):55.
GAO Ya, LIU Weiguo, LUO Guangzhao. Research of surge current for PMSM when power down-rejoining on[J]. Electric Machines and Control,2017,21(3):55.
(編輯:邱赫男)
