基于非線(xiàn)性建模與擬合的永磁同步電機(jī)轉(zhuǎn)子初始位置精確估計(jì)方法
2024-05-30 00:00:00姚培煜馮國(guó)棟吳軒彭衛(wèi)丁北辰
電機(jī)與控制學(xué)報(bào) 2024年2期
關(guān)鍵詞:永磁同步電機(jī)


摘 要:
針對(duì)永磁同步電機(jī)轉(zhuǎn)子初始位置估計(jì)的精度與收斂速度受限問(wèn)題,提出一種基于高頻信號(hào)注入的非線(xiàn)性建模與擬合實(shí)現(xiàn)的初始位置估計(jì)方法。首先,建立初始位置與高頻信號(hào)響應(yīng)的關(guān)聯(lián)模型,表明高頻響應(yīng)可用于直接計(jì)算初始位置,但直接計(jì)算結(jié)果在大部分轉(zhuǎn)子位置易受測(cè)量噪聲的影響。為此,提出基于多項(xiàng)式模型建立位置估計(jì)非線(xiàn)性模型,選取合適的模型參數(shù),利用少量測(cè)試點(diǎn)擬合該模型,即可實(shí)現(xiàn)初始位置的快速精確估計(jì),有效提高了估計(jì)精度與系統(tǒng)抗干擾能力。實(shí)驗(yàn)與仿真結(jié)果表明,相比現(xiàn)有方法,提出的方法易于實(shí)現(xiàn),無(wú)需復(fù)雜濾波器與觀(guān)測(cè)器設(shè)計(jì),僅需要選取少量測(cè)試點(diǎn)即可快速估計(jì)精確轉(zhuǎn)子初始位置,在保證估計(jì)精度的同時(shí)改進(jìn)了傳統(tǒng)估計(jì)方法收斂速度慢問(wèn)題。
關(guān)鍵詞:永磁同步電機(jī);高頻信號(hào)注入;轉(zhuǎn)子初始位置估計(jì);多項(xiàng)式模型;非線(xiàn)性模型
DOI:10.15938/j.emc.2024.02.014
中圖分類(lèi)號(hào):TM351
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1007-449X(2024)02-0142-10
收稿日期: 2022-09-24
基金項(xiàng)目:國(guó)家自然科學(xué)基金(52105079,62103455)
作者簡(jiǎn)介:姚培煜(1999—),男,碩士研究生,研究方向?yàn)橛来磐诫姍C(jī)無(wú)位置傳感控制;
馮國(guó)棟(1988—),男,博士,副教授,碩士生導(dǎo)師,研究方向?yàn)樾履茉雌?chē)電機(jī)系統(tǒng)控制關(guān)鍵技術(shù);
吳 軒(1983—),男,博士,副教授,研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)、大型風(fēng)力發(fā)電技術(shù)、特種車(chē)輛電驅(qū)動(dòng)技術(shù);
彭衛(wèi)文(1987—),男,博士,副教授,研究方向?yàn)橄到y(tǒng)可靠性、智能系統(tǒng)的狀態(tài)監(jiān)測(cè)、故障預(yù)測(cè)與健康管理;
丁北辰(1990—),男,博士,副教授,研究方向?yàn)闄C(jī)器人控制與新能源汽車(chē)動(dòng)力系統(tǒng)控制。
通信作者:丁北辰
High precision initial rotor position estimation method for permanent magnet synchronous motor based on nonlinear modeling and fitting
YAO Peiyu1, FENG Guodong1, WU Xuan2, PENG Weiwen1, DING Beichen3
(1.School of Intelligent Systems Engineering, Sun Yat-sen University, Shenzhen 518107, China; 2.College of Electrical and Information Engineering, Hunan University, Changsha 410082, China; 3.School of Advanced Manufacturing, Sun Yat-sen University, Shenzhen 518107, China)
Abstract:
Aiming at the problem that the accuracy and convergence speed of rotor initial position estimation of permanent magnet synchronous motor are limited, a nonlinear modeling and fitting method based on high-frequency signal injection was proposed. Firstly, the correlation model between the initial position and the high-frequency signal response was established, which shows that the high-frequency response can be used to calculate the initial position directly, but the direct calculation results are vulnerable to the measurement noise in most rotor positions. To solve this issue, a polynomial model was used to establish the nonlinear model of location estimation, suitable model parameters were selected and a few of test points were used to fit the polynomial model to achieve rapid and accurate calculation of the initial position, which effectively improves the estimation accuracy and anti-interference ability of the system. The experimental and simulation results show that compared with the existing methods, in the proposed method it is easy to implement, complex filter and observer design is not needed, and only a few test points need to be selected to quickly estimate the initial position of the precise rotor, which ensures the estimation accuracy and improves the problem of slow convergence of the traditional estimation methods.
Keywords:permanent magnet synchronous motor;high frequency signal injection;initial rotor position estimation;polynomial model;nonlinear model
0 引 言
永磁同步電機(jī)(permanent magnet synchronous motor, PMSM)因其結(jié)構(gòu)簡(jiǎn)單,高效率,高能量密度等優(yōu)點(diǎn)而被廣泛應(yīng)用于新能源汽車(chē)等多個(gè)領(lǐng)域[1-3]。對(duì)于永磁同步電機(jī)伺服系統(tǒng),轉(zhuǎn)子初始位置是保證電機(jī)啟動(dòng)性能的重要參數(shù)。具體而言,精確的初始位置能夠提高電機(jī)控制性能,若初始位置誤差過(guò)大,會(huì)降低啟動(dòng)性能,甚至?xí)?dǎo)致電機(jī)反轉(zhuǎn)與啟動(dòng)失敗[4-6]。轉(zhuǎn)子位置可通過(guò)光電編碼器,旋轉(zhuǎn)變壓器等獲取,但增加了系統(tǒng)成本和體積,在低成本應(yīng)用如家用電器以及超高速電機(jī)應(yīng)用中,無(wú)位置傳感控制技術(shù)被廣泛應(yīng)用。初始位置估計(jì)是無(wú)位置傳感控制的重要環(huán)節(jié),可有效地提高系統(tǒng)啟動(dòng)與控制的可靠性。因此,轉(zhuǎn)子初始位置估計(jì)對(duì)永磁同步電機(jī)伺服系統(tǒng)十分關(guān)鍵。
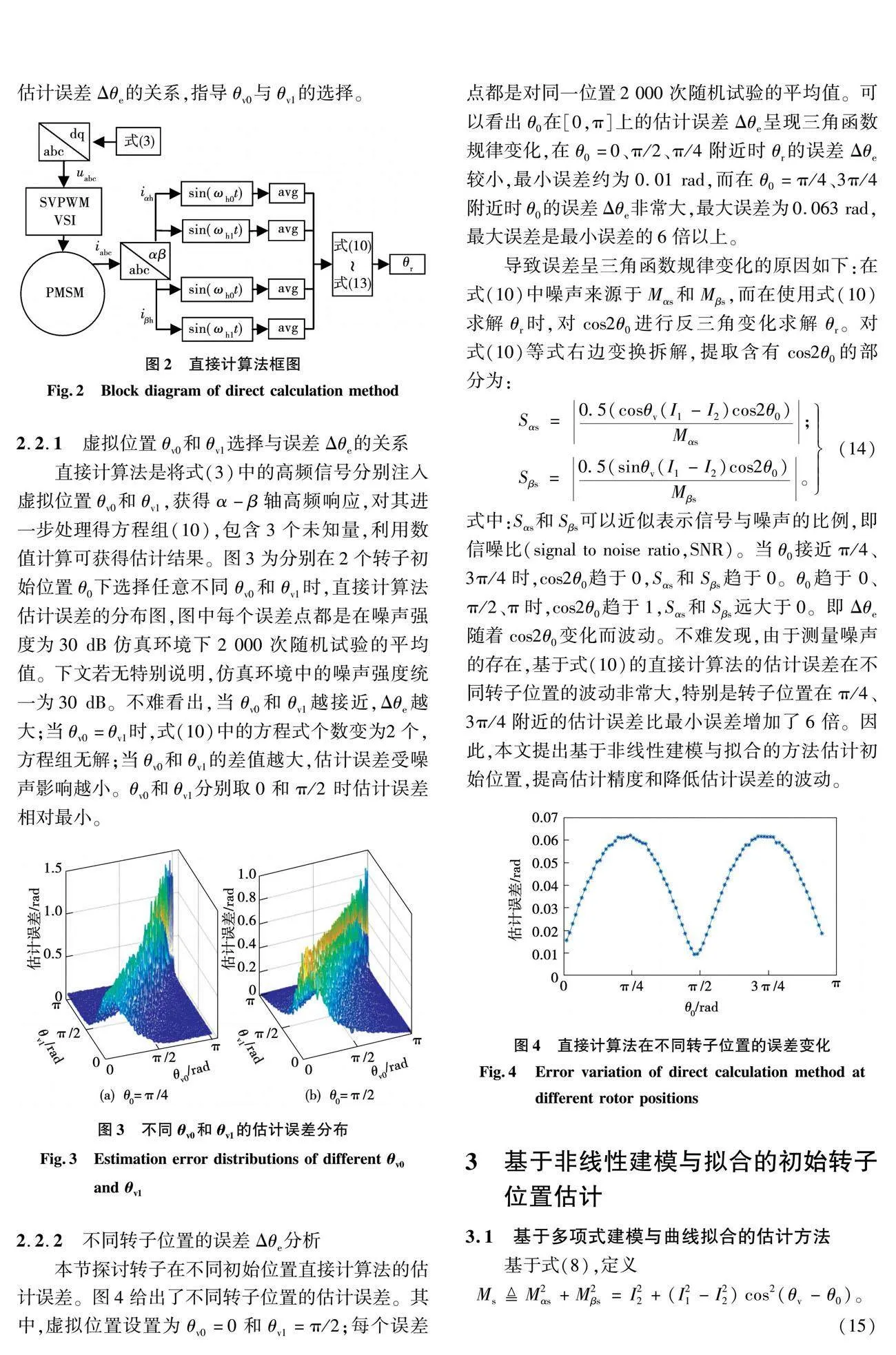
轉(zhuǎn)子初始位置估計(jì)在文獻(xiàn)中已有廣泛研究。其中,利用電感飽和效應(yīng)是近年來(lái)解決轉(zhuǎn)子初始位置估計(jì)的重要手段,可分為脈沖電壓法[7-10],高頻信號(hào)注入法[11-23]。脈沖電壓法通過(guò)注入一系列脈沖電壓矢量,利用電流響應(yīng)估計(jì)轉(zhuǎn)子位置。然而,脈沖電壓注入可導(dǎo)致轉(zhuǎn)子轉(zhuǎn)動(dòng),且過(guò)程耗時(shí)長(zhǎng)。高頻信號(hào)注入法實(shí)現(xiàn)簡(jiǎn)單,無(wú)需電機(jī)參數(shù)和額外硬件,可分高頻旋轉(zhuǎn)電壓注入[11-16]和高頻脈振電壓注入[17-23]。高頻旋轉(zhuǎn)電壓注入法依賴(lài)于轉(zhuǎn)子凸極效應(yīng),且需要通過(guò)坐標(biāo)變換和濾波器提取轉(zhuǎn)子位置。文獻(xiàn)[11]對(duì)高頻電流響應(yīng)進(jìn)行低通濾波,根據(jù)電流幅值隨轉(zhuǎn)子位置變化實(shí)現(xiàn)轉(zhuǎn)子位置估計(jì)。文獻(xiàn)[14]對(duì)三相高頻電流正、負(fù)序分量分離,利用任意一相正負(fù)序相角差估計(jì)轉(zhuǎn)子位置。文獻(xiàn)[15]分析了旋轉(zhuǎn)高頻注入方法受采樣、濾波器的影響,并提出一種補(bǔ)償算法提高位置觀(guān)測(cè)精度。高頻脈振電壓注入法對(duì)凸極性要求不高,適用于表貼式電機(jī)。文獻(xiàn)[17]針對(duì)相移問(wèn)題,改用交直軸響應(yīng)電流解調(diào)去除高頻分量。文獻(xiàn)[18]通過(guò)對(duì)虛擬直軸施加高頻電壓產(chǎn)生一系列振動(dòng)信號(hào)實(shí)現(xiàn)初始位置估計(jì)。但該方法需要振動(dòng)傳感器,且在轉(zhuǎn)動(dòng)慣量較大的應(yīng)用中,需要較大電流誘導(dǎo)轉(zhuǎn)子振動(dòng)。文獻(xiàn)[20]在脈振注入基礎(chǔ)上引入載波頻率成分法判斷磁極極性,避免二次信號(hào)注入,簡(jiǎn)化了實(shí)現(xiàn)步驟。現(xiàn)有高頻信號(hào)注入估計(jì)方法大多通過(guò)濾波環(huán)節(jié)分離高頻信號(hào),再通過(guò)觀(guān)測(cè)器估計(jì)轉(zhuǎn)子初始位置。但濾波器對(duì)高頻信號(hào)的幅值和相位產(chǎn)生影響,限制了系統(tǒng)帶寬,無(wú)法同時(shí)保證轉(zhuǎn)子位置的辨識(shí)精度和辨識(shí)速度。同時(shí),觀(guān)測(cè)器的設(shè)計(jì)也依賴(lài)高頻信號(hào)響應(yīng)和電機(jī)參數(shù)。
針對(duì)以上問(wèn)題,本文提出一種基于高頻信號(hào)注入的非線(xiàn)性建模與擬合方法,實(shí)現(xiàn)轉(zhuǎn)子初始位置估計(jì)。在虛擬直軸注入高頻信號(hào),解調(diào)高頻電流響應(yīng)即可獲得初始位置,但易受轉(zhuǎn)子所在位置的影響。在此基礎(chǔ)上,提出基于非線(xiàn)性建模的初始位置估計(jì)方法,利用少數(shù)測(cè)試對(duì)非線(xiàn)性模型辨識(shí),實(shí)現(xiàn)對(duì)轉(zhuǎn)子位置的精確估計(jì)。此方法無(wú)需復(fù)雜濾波器和觀(guān)測(cè)器設(shè)計(jì),避免相位偏移和收斂速度慢等問(wèn)題。此外,采用測(cè)試點(diǎn)快速擬合估計(jì)模型有效提高初始位置估計(jì)精度和收斂速度。仿真與實(shí)驗(yàn)結(jié)果驗(yàn)證提出方法的有效性。
3.2 多項(xiàng)式模型參數(shù)選擇
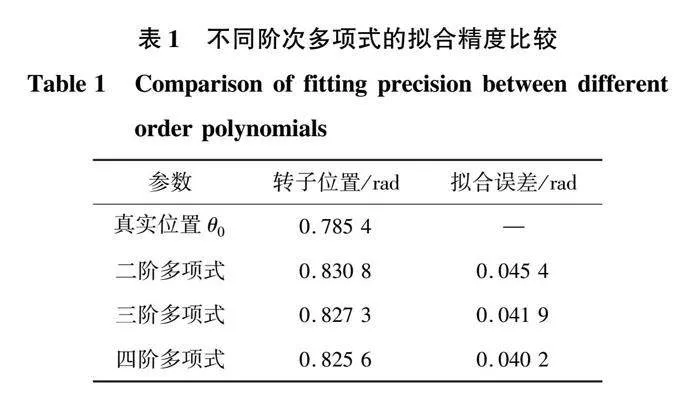
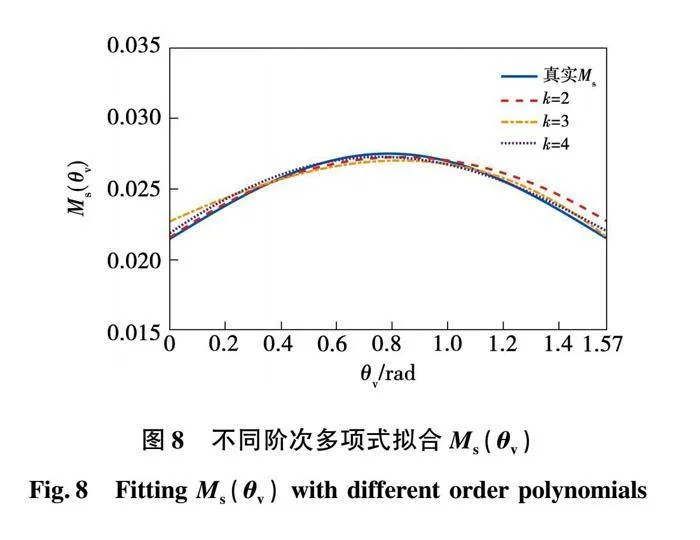
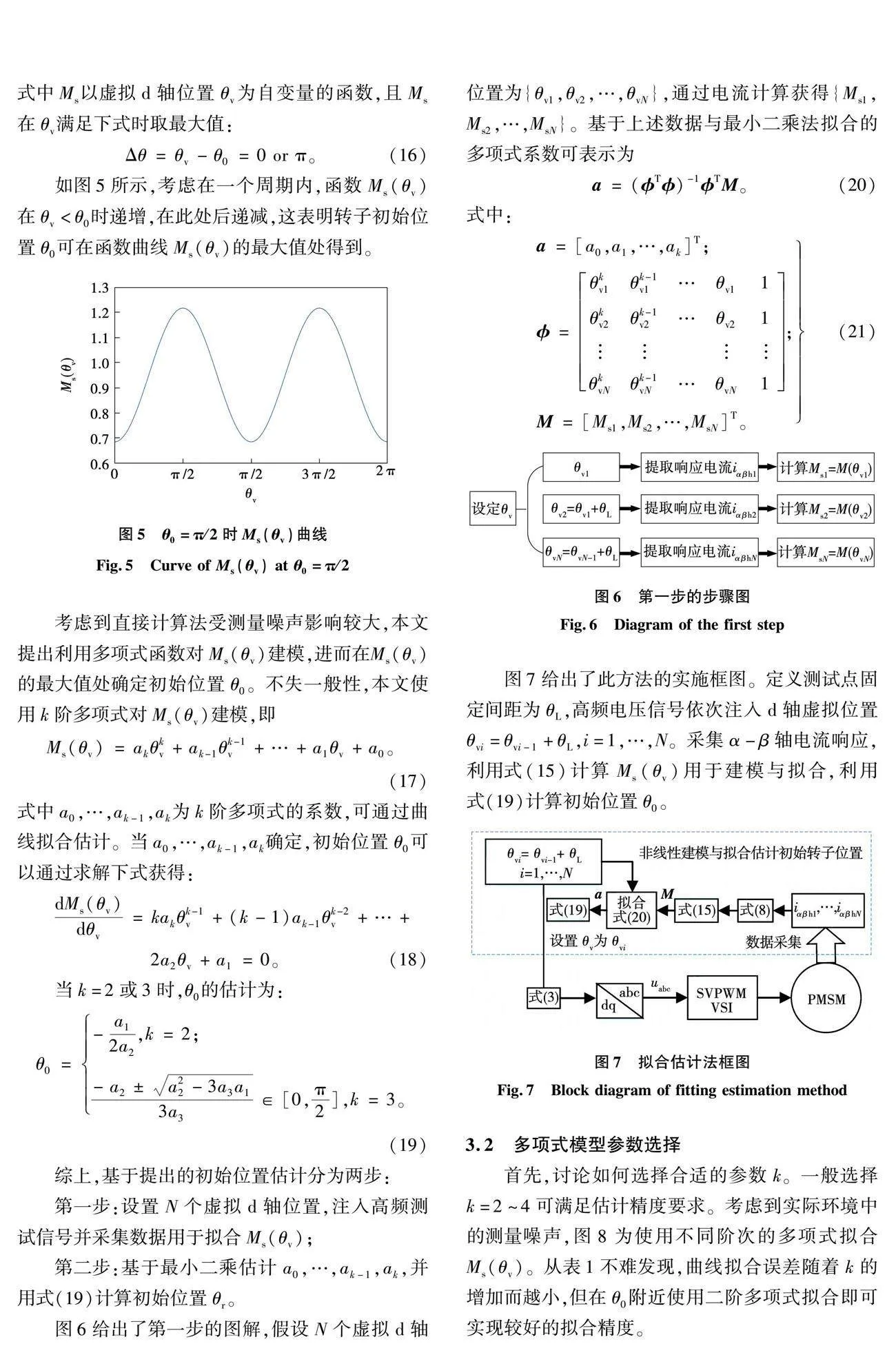
首先,討論如何選擇合適的參數(shù)k。一般選擇k=2~4可滿(mǎn)足估計(jì)精度要求。考慮到實(shí)際環(huán)境中的測(cè)量噪聲,圖8為使用不同階次的多項(xiàng)式擬合Ms(θv)。從表1不難發(fā)現(xiàn),曲線(xiàn)擬合誤差隨著k的增加而越小,但在θ0附近使用二階多項(xiàng)式擬合即可實(shí)現(xiàn)較好的擬合精度。
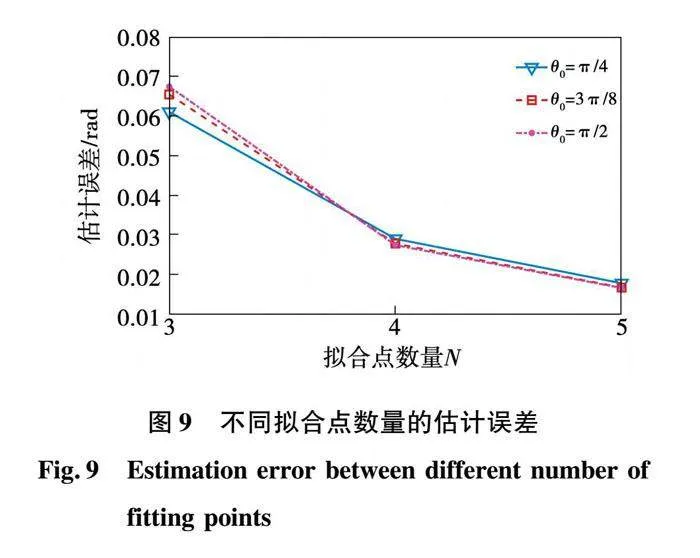
擬合k次多項(xiàng)式最少需要k+1個(gè)擬合點(diǎn),即N≥k+1。其次,研究如何選取合適的虛擬位置{θv1,θv2,…,θvN},保證初始位置估計(jì)精度。圖9給出了選擇k=2、N=3、4、5時(shí)的估計(jì)誤差。從圖9中不難發(fā)現(xiàn)擬合點(diǎn)數(shù)量N=5較N=4擬合精度提升并不明顯,但需要增加測(cè)試點(diǎn);而N=4較于N=3估計(jì)精度有顯著提高,且N=4對(duì)應(yīng)的估計(jì)精度已滿(mǎn)足應(yīng)用需求。綜合實(shí)現(xiàn)復(fù)雜度與估計(jì)精度要求,本文選擇N=4個(gè)擬合點(diǎn)實(shí)現(xiàn)多項(xiàng)式模型的擬合。
直接計(jì)算法估計(jì)的θr可用于確定一個(gè)θ0的粗略分布區(qū)域。假定θ0=π/4、k=2、N=4。分別在區(qū)間R1=[0,π/2]、R2=[π/8,3π/8]和R3=[3π/16,5π/16]內(nèi)隨機(jī)選取擬合點(diǎn)進(jìn)行曲線(xiàn)擬合估計(jì),表2是進(jìn)行2 000次隨機(jī)實(shí)驗(yàn)的平均誤差,表明通過(guò)θr確定一個(gè)合適的區(qū)間可以有效地提高估計(jì)精度。
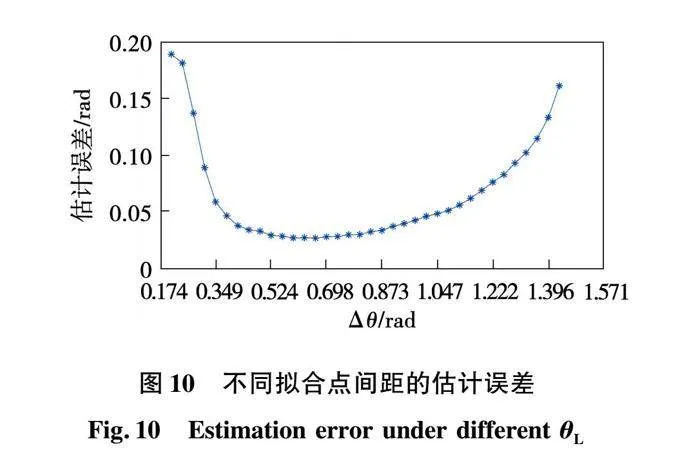
Ms(θv) 曲線(xiàn)在峰值附近以峰值為中心左右對(duì)稱(chēng),因此在兩側(cè)對(duì)稱(chēng)選取擬合點(diǎn)能有效提高擬合效果。考慮到估計(jì)的θr接近峰值位置,因此本文選擇在θr左右對(duì)稱(chēng)地選取擬合點(diǎn)。具體而言,首先確定左側(cè)第一個(gè)擬合點(diǎn),其次在當(dāng)前位置疊加θL確定下一擬合點(diǎn)位置,該過(guò)程可表示為
θ2=θ1+θL,…,θN=θN-1+θL。(22)
式中θL對(duì)擬合結(jié)果有顯著影響。假定θ0=π/4、k=2、N=4,圖10給出了選擇不同θL時(shí)估計(jì)誤差的變化曲線(xiàn)。不難看出,選擇θL=0.558 rad估計(jì)誤差最小。綜上,本文選擇二階多項(xiàng)式四點(diǎn)擬合,其中擬合點(diǎn)以直接計(jì)算值θr左右對(duì)稱(chēng)等間距θL=0.558 rad選取。
3.3 多項(xiàng)式曲線(xiàn)擬合法仿真實(shí)驗(yàn)
本節(jié)通過(guò)仿真結(jié)果驗(yàn)證提出方法的有效性。上文分析得出k階多項(xiàng)式參數(shù)k=2、N=4以及擬合點(diǎn)間距選擇θL=0.558 rad,具有較高的估計(jì)精度,下文仿真實(shí)驗(yàn)都將使用此模型參數(shù)。
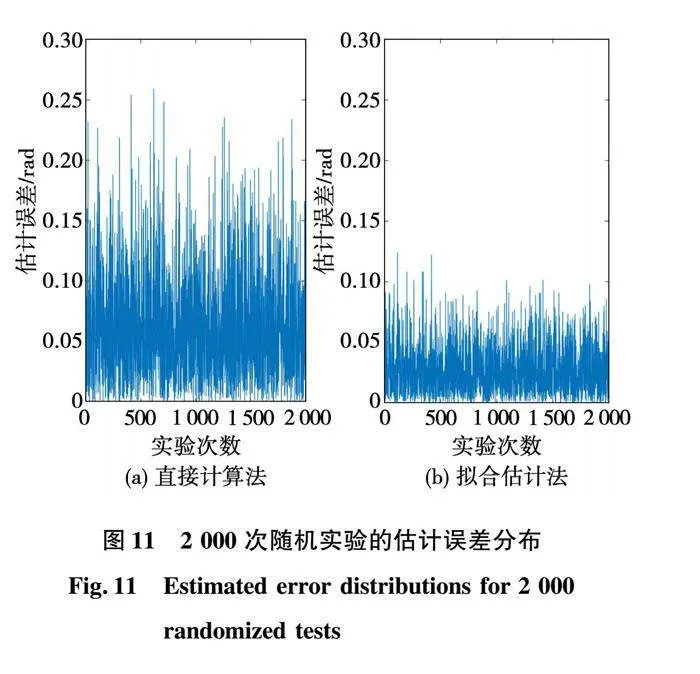
圖11是假定初始位置θ0=π/4時(shí),分別使用直接計(jì)算法和擬合估計(jì)法進(jìn)行2 000次隨機(jī)實(shí)驗(yàn)的估計(jì)誤差分布。不難發(fā)現(xiàn),相比于直接計(jì)算法,曲線(xiàn)擬合估計(jì)法在同一轉(zhuǎn)子位置上的估計(jì)誤差和誤差波動(dòng)都更小。
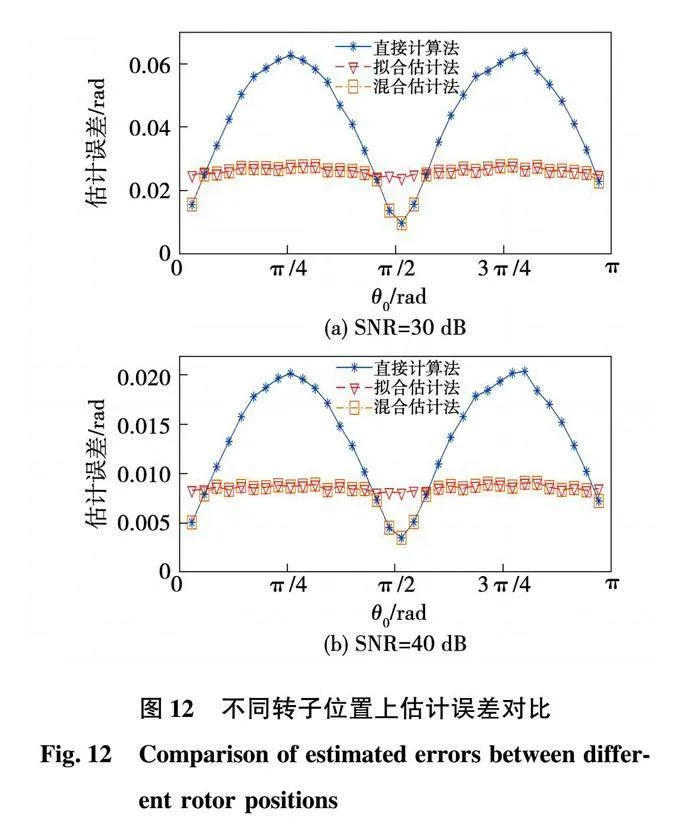
圖12為使用高頻注入直接計(jì)算法和曲線(xiàn)擬合估計(jì)法在不同轉(zhuǎn)子位置上的估計(jì)誤差比較,圖12(a)、(b)分別為30 dB和40 dB測(cè)量噪聲下的結(jié)果。圖中每點(diǎn)都是進(jìn)行了2 000次實(shí)驗(yàn)的平均估計(jì)誤差。可以發(fā)現(xiàn)在θ0=π/4、3π/4附近的大部分區(qū)域,擬合誤差遠(yuǎn)小于直接計(jì)算誤差,差值最大的位置擬合誤差較直接計(jì)算誤差減小了0.035 2 rad,減小了56%。另外,對(duì)比不同噪聲強(qiáng)度環(huán)境可以發(fā)現(xiàn),曲線(xiàn)擬合估計(jì)法在不同噪聲強(qiáng)度下都能夠保持較大幅度的估計(jì)精度提升。
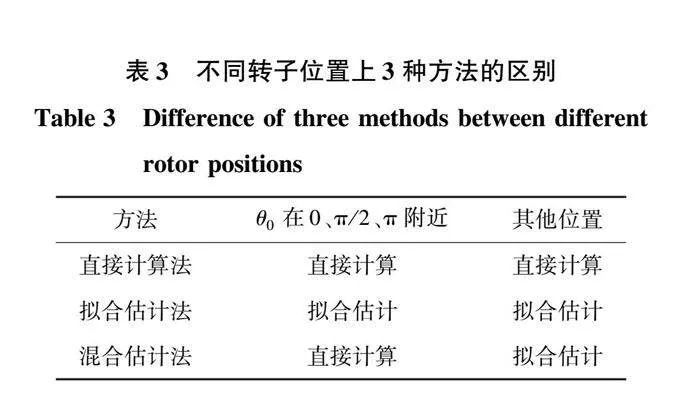
曲線(xiàn)擬合法在超過(guò)80%的轉(zhuǎn)子位置上估計(jì)誤差小于直接計(jì)算法,在一些位置誤差能減小50%以上。但在θ0=0、π/2、π附近其余20%的位置上,因信噪比較大,直接計(jì)算法估計(jì)誤差小于曲線(xiàn)擬合法。因此在一個(gè)電角度周期內(nèi),可以采用兩種方法混合估計(jì),當(dāng)θ0在0、π/2、π附近小部分區(qū)域時(shí)令θr為最終估計(jì)結(jié)果,否則進(jìn)一步實(shí)施擬合方法估計(jì)初始位置,如表3所示。
在所有位置上,θr的平均誤差為0.043 2 rad,擬合θ0的平均誤差為0.026 8 rad,混合估計(jì)法可使平均誤差進(jìn)一步減小到0.024 8 rad。整體估計(jì)精度提高40%,且擬合估計(jì)值的誤差波動(dòng)更小、更平穩(wěn)。
4 實(shí)驗(yàn)驗(yàn)證
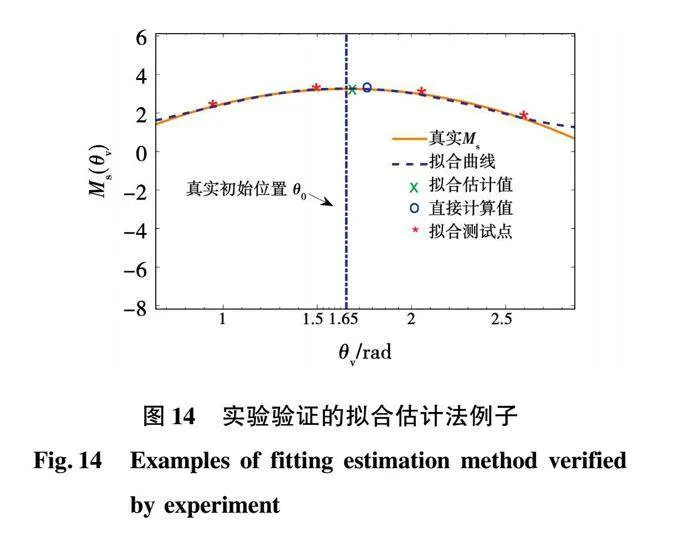
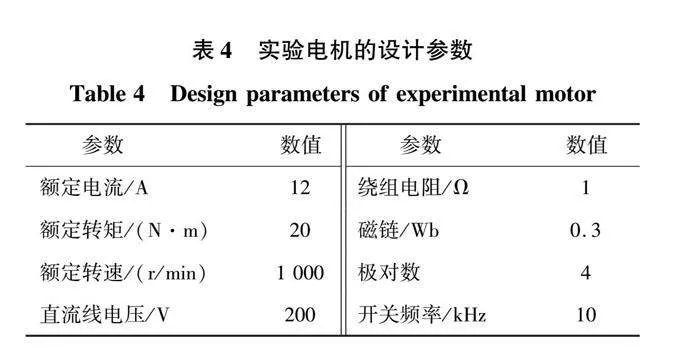
在圖13所示的PMSM樣機(jī)實(shí)驗(yàn)平臺(tái)上驗(yàn)證本文所提出的方法。實(shí)驗(yàn)電機(jī)的設(shè)計(jì)參數(shù)如表4所示。測(cè)試電機(jī)配備高分辨率光學(xué)編碼器,單轉(zhuǎn)脈沖數(shù)(PPR)為2 500。從該編碼器測(cè)量的轉(zhuǎn)子位置將被用來(lái)評(píng)估提出估計(jì)方法的性能,不參與實(shí)際控制。在實(shí)驗(yàn)平臺(tái)驗(yàn)證方法過(guò)程中,電機(jī)的轉(zhuǎn)速與轉(zhuǎn)矩都為0。注入高頻信號(hào)的參數(shù)為:注入信號(hào)頻率ωh=150 Hz,注入信號(hào)幅值Vdh=20 V。選擇的非線(xiàn)性模型參數(shù)為:k=2、N=4、θL=0.558 rad。圖14出了使用此參數(shù)對(duì)Ms(θv)進(jìn)行建模估計(jì)θ0的例子。
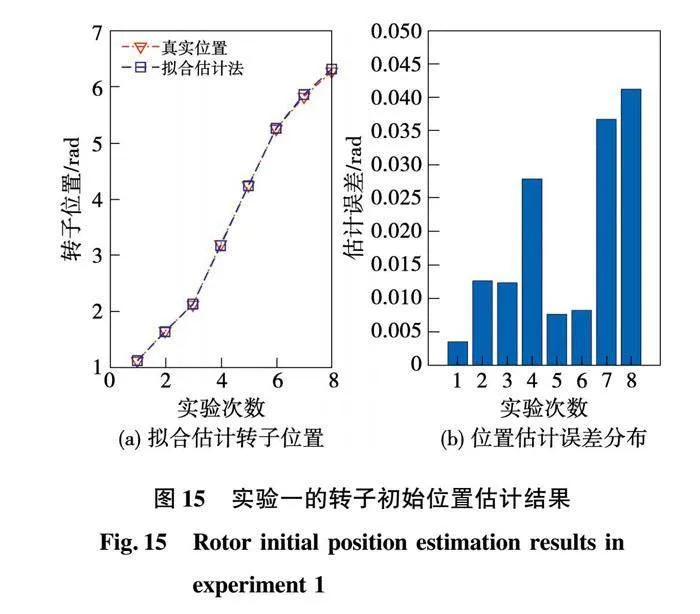
首先,實(shí)驗(yàn)一在不同轉(zhuǎn)子位置進(jìn)行實(shí)驗(yàn)以評(píng)估提出估計(jì)方法的效果。圖15(a)給出了電機(jī)一個(gè)電角度周期內(nèi)8個(gè)位置的估計(jì)結(jié)果,不難發(fā)現(xiàn)估計(jì)結(jié)果與真實(shí)位置十分接近,具體誤差分布見(jiàn)圖15(b)。從圖15可以看出,一個(gè)電角度周期內(nèi),最大擬合誤差0.041 2 rad,最小擬合誤差0.003 5 rad,平均擬合誤差約為0.018 rad。結(jié)果表明,曲線(xiàn)擬合估計(jì)法能精確估計(jì)轉(zhuǎn)子初始位置。
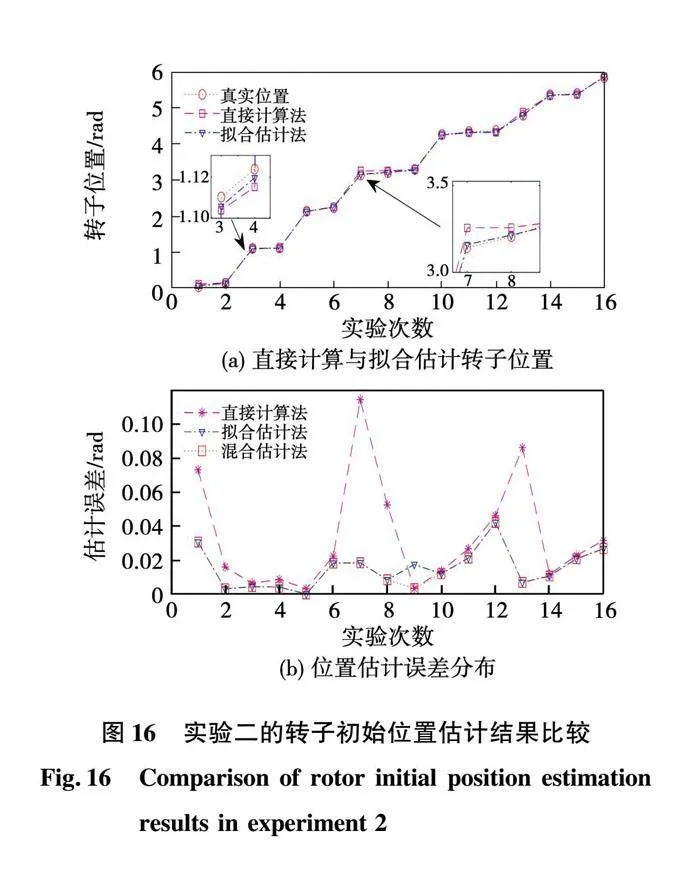
其次,實(shí)驗(yàn)二對(duì)比直接計(jì)算法與擬合估計(jì)法的實(shí)驗(yàn)結(jié)果。直接計(jì)算法從α-β軸高頻響應(yīng)電流計(jì)算轉(zhuǎn)子初始位置,曲線(xiàn)擬合估計(jì)法采用二階多項(xiàng)式四點(diǎn)非線(xiàn)性建模與擬合估計(jì)轉(zhuǎn)子位置。估計(jì)結(jié)果對(duì)比如圖16(a)所示,2種方法的估計(jì)誤差對(duì)比如圖16(b)所示。可以看出,直接計(jì)算法的平均估計(jì)誤差為0.034 rad,最大估計(jì)誤差0.114 rad,擬合估計(jì)的平均擬合誤差為0.016 rad,最大擬合誤差0.042 rad。實(shí)驗(yàn)證明提出的方法相比于傳統(tǒng)高頻注入法大幅提升了估計(jì)精度,降低了誤差波動(dòng)。
5 結(jié) 論
本文提出一種基于高頻注入的非線(xiàn)性建模與擬合的轉(zhuǎn)子初始位置估計(jì)方法,并通過(guò)仿真和實(shí)驗(yàn)驗(yàn)證提出方法的有效性。提出的方法利用少數(shù)測(cè)試點(diǎn)對(duì)位置估計(jì)非線(xiàn)性模型快速擬合,實(shí)現(xiàn)簡(jiǎn)單,不依賴(lài)電機(jī)參數(shù),無(wú)需復(fù)雜濾波器和觀(guān)測(cè)器的設(shè)計(jì)。實(shí)驗(yàn)結(jié)果表明,最大誤差小于0.05 rad,平均誤差小于0.02 rad。與現(xiàn)有方法相比,提出的方法具有估計(jì)精度高,收斂速度快,易于實(shí)現(xiàn)等優(yōu)勢(shì),工程實(shí)用價(jià)值高。此外,該方法同樣在無(wú)位置傳感器控制技術(shù)上有潛在的應(yīng)用前景。
參 考 文 獻(xiàn):
[1] SHOU W, KANG J, DEGANO M, et al. An accurate wide-speed range control method of IPMSM considering resistive voltage drop and magnetic saturation[J]. IEEE Transactions on Industrial Electronics, 2020,67(4):2630.
[2] 朱元,肖明康,陸科,等. 電動(dòng)汽車(chē)永磁同步電機(jī)轉(zhuǎn)子溫度估計(jì)[J]. 電機(jī)與控制學(xué)報(bào),2021,25(6):72.
ZHU Yuan, XIAO Mingkang, LU Ke, et al. Rotor temperature estimation for permanent magnet synchronous motors in electric vehicles[J]. Electric Machines and Control,2021,25(6):72.
[3] 王曉遠(yuǎn),劉銘鑫,陳學(xué)永,等. 電動(dòng)汽車(chē)用 ANGN 帶濾波補(bǔ)償三階滑模自抗擾控制[J]. 電機(jī)與控制學(xué)報(bào),2021,25(11):25.
WANG Xiaoyuan, LIU Mingxin, CHENG Xueyong, et al. Third-order sliding mode active disturbance rejection control of PMSM with filter compensation for electric vehicle [J]. Electric Machines and Control,2021,25(11): 25.
[4] BRIZ F, DEGNER M. Rotor position estimation[J]. IEEE Industrial Electronics Magazine,2011,5(2):24.
[5] YEH H, YANG S. Phase inductance and rotor position estimation for sensorless permanent magnet synchronous machine drives at standstill[J]. IEEE Access, 2021(9):32897.
[6] 賈洪平,賀益康. 基于高頻注入法的永磁同步電動(dòng)機(jī)轉(zhuǎn)子初始位置檢測(cè)研究[J]. 中國(guó)電機(jī)工程學(xué)報(bào),2007, 27(15): 15.
JIA Hongping, HE Yikang. Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J]. Proceedings of the CSEE,2007, 27(15): 15.
[7] 張樹(shù)林,康勁松,母思遠(yuǎn). 基于等寬電壓脈沖注入的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法[J]. 中國(guó)電機(jī)工程學(xué)報(bào),2020,40(19):6085.
ZHANG Shulin, KANG Jinsong, MU Siyuan. Initial rotor position detection for permanent magnet synchronous motor based on identical width voltage pulse injection[J]. Proceedings of the CSEE,2020, 40(19):6085.
[8] 王賓,彭皆彩,于水娟. 一種電流合成的 PMSM 轉(zhuǎn)子初始位置檢測(cè)方法[J]. 電機(jī)與控制學(xué)報(bào),2020,24(8):67.
WANGBin, PENG Jiecai, YU Shuijuan. Method to detect the initial rotor position of PMSM based on current synthesis [J]. Electric Machines and Control,2020,24(8):67.
[9] 孟高軍,余海濤,黃磊, 等. 一種基于線(xiàn)電感變化特征的永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)新方法[J]. 電工技術(shù)學(xué)報(bào), 2015, 30(20): 1.
MENG Gaojun, YU Haitao, HUANG Lei, et al. A novel initial rotor position estimation method for PMSM based on variation behavior of line inductances[J]. Transactions of China Electrotechnical Society, 2015, 30(20): 1.
[10] WU X, LU Z, LING Z, et al. An improved pulse voltage injection based initial rotor position estimation method for PMSM[J]. IEEE Access,2021(9):121906.
[11] 魯家棟,劉景林,衛(wèi)麗超. 永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法[J]. 電工技術(shù)學(xué)報(bào),2015,30(7):105.
LU Jiadong, LIU Jinglin, WEI Lichao. Estimation of the initial rotor position for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society,2015,30(7):105.
[12] JIN X, NI R, CHEN W, et al. High-frequency voltage-injection methods and observer design for initial position detection of permanent magnet synchronous machines[J]. IEEE Transactions on Power Electronics, 2018,33(9):7971.
[13] 王華斌,施金良,陳國(guó)榮, 等. 內(nèi)嵌式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)[J]. 電機(jī)與控制學(xué)報(bào),2011,15(3):40.
WANG Huabin, SHI Jinliang, CHEN Guorong, et al. Initial rotor position detection of IPMSM [J]. Electric Machines and Control,2011,15(3):40.
[14] 劉景林,魯家棟. 基于相電流正負(fù)序分量相角差的高精度內(nèi)置式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法[J]. 電工技術(shù)學(xué)報(bào),2016,31(23):63.
LIU Jinglin, LU Jiadong. High-precision estimation method of initial rotor position for IPMSM based on phase difference of positive and negative sequence current component[J]. Transactions of China Electrotechnical Society,2016,31(23):63.
[15] 楊健,楊淑英,李浩源,等. 基于旋轉(zhuǎn)高頻電壓注入的永磁同步電機(jī)轉(zhuǎn)子初始位置辨識(shí)方法[J]. 電工技術(shù)學(xué)報(bào),2018,33(15):3547.
YANG Jian, YANG Shuying, LI Haoyuan, et al. Initial rotor position estimation for IPMSM based on high frequency rotating voltage injection[J]. Transactions of China Electrotechnical Society,2018,33(15):3547.
[16] SHUANG B, ZHU Z. A novel sensorless initial position estimation and startup method[J]. IEEE Transactions on Industrial Electronics,2021,68(4):2964.
[17] 于安博,劉利,闞志忠,等. 高頻脈振信號(hào)注入永磁同步電機(jī)無(wú)濾波器初始位置辨識(shí)方法[J]. 電工技術(shù)學(xué)報(bào),2021,36(4):801.
YU Anbo, LIU Li, KAN Zhizhong, et al. Initial position identification of PMSM with filterless high frequency pulse signal injection method[J]. Transactions of China Electrotechnical Society,2021,36(4):801.
[18] FU X, XU Y, HE H, et al. Initial rotor position estimation by detecting vibration of permanent magnet synchronous machine[J]. IEEE Transactions on Industrial Electronics,2021,68(8):6595.
[19] ZHANG X, LI H, YANG S, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection[J]. IEEE Transactions on Industrial Electronics,2018,65(6):4702.
[20] 李潔,周波,劉兵,等. 表貼式永磁同步電機(jī)無(wú)位置傳感器起動(dòng)新方法[J]. 中國(guó)電機(jī)工程學(xué)報(bào),2016, 36(9):2513.
LI Jie, ZHOU Bo, LIU Bing, et al. A novel starting strategy of sensorless control for surface mounted permanent magnet synchronous machines[J].Proceedings of the CSEE,2016,36(9):2513.
[21] TANG Q, SHEN A, LUO X, et al. PMSM sensorless control by injecting hf pulsating carrier signal into ABC frame[J]. IEEE Transactions on Power Electronics, 2017,32(5):3767.
[22] 呂德剛,姜國(guó)威,紀(jì)堂龍. 永磁同步電機(jī)低速域改進(jìn)高頻脈振注入控制[J].哈爾濱理工大學(xué)學(xué)報(bào),2022,27(6):32.
L Degang, JIANG Guowei, JI Tanglong. Improved high frequency pulse injection control inlow speed domain of permanent magnet synchronous motor[J]. Journal of Harbin University of Science and Technology, 2022, 27(6): 32.
[23] WU T, LUO D, HUANG S, et al. A fast estimation of initial rotor position for low-speed free-running IPMSM[J]. IEEE Transactions on Power Electronics, 2020, 35(7): 7664.
[24] XUAN W, YAO F, XIAO L, et al. Initial rotor position detection for sensorless interior PMSM with square-wave voltage injection[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1.
(編輯:劉琳琳)
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車(chē)工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國(guó)科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識(shí)與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識(shí)與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(bào)(2015年6期)2016-02-18 00:26:49
