基于情景模擬標準的電動滑板車安全風險場景再現構建
2024-06-03 05:45:03劉霞周成陳倩雯王坤然房祥靜許麗丹
中國標準化 2024年5期
關鍵詞:風險
劉霞 周成 陳倩雯 王坤然 房祥靜 許麗丹

摘 要:基于國家標準《消費品安全 危害識別 情景模擬法》(GB/T 39108-2020)中的相關規定,通過相關軟件與硬件搭建電動滑板車風險分析平臺,模擬場景設計、執行測評、數據收集和結果分析等過程,分析了電動滑板車風險試驗系統的構建過程,為后續電動滑板車的風險分析提供理論依據和試驗平臺。
關鍵詞:電動滑板車,情景模擬,風險,場景
DOI編碼:10.3969/j.issn.1002-5944.2024.05.027
國家標準《消費品安全 危害識別 情景模擬法》(GB/T 39108—2020)是我國第1部提出運用虛擬現實方法,搭建消費品傷害場景的國家標準,該標準規定了運用虛擬現實等情景模擬方法,通過相關流程進行消費品安全風險分析,用于各相關方在消費品設計、生產、使用(包括維修)階段開展危害識別。本研究在充分依據國家標準的基礎上,開發了電動滑板車騎行過程中,可能發生外環境光線過暗、滑板車燈位置不合理等導致騎行車側翻,或者撞到路人等安全事件場景[1-3],為開展電動滑板車研發和設計人員識別產品安全危害源提供依據。
1 系統軟硬件組成
1.1 場景模型渲染平臺
選用3ds Max軟件創建場景三維模型,同時創建電動滑板車、虛擬人物等部分的三維模型和動畫,處理好的模型保存為FBX文件格式。Unity3D引擎支持FBX文件格式,能夠實現模型的網格、材質、動畫和骨骼屬性同時導入。
Unity3D引擎兼容C#、JAVA Script和Boo Script三種語言。本研究選擇C # 語言進行開發,選用Unity3D作為電動滑板車安全風險試驗系統的開發平臺[4]。
1.2 硬件設備
本系統硬件主要由顯示層、交互層、數據層組成,顯示層硬件選用HTC Vive頭戴式設備和電腦顯示屏;交互層硬件包括HTC Vive操控手柄、電動滑板車模擬器、鼠標以及激光定位器;數據層硬件包括圖形工作站和計算機。HTC Vive對運行主機的配置要求如下:①處理器為Intel i7 10850H或更高配置;②顯卡為NVIDA GTX 1060同等或更高配置;③內存16GB;④視頻輸出為HDMI 1.4/ DisplayPort 1.2或更高版本;⑤操作系統為Windows10。
2 系統開發流程
電動車滑板車安全風險試驗系統開發主要包括試驗參數設置頁面構建、試驗場景構建以及VR設備接入三個部分。開發流程主要包括以下步驟:①對環境要素和電動滑板車進行三維建模與渲染;②采集電動滑板車實時騎行數據,并實時上傳;③數據解析為后續數據綁定做準備;④數據綁定,實現實時驅動,同時提供可視化界面,試驗者在騎行過程中也能同步獲取當前騎行過程數據;⑤將環境要素模型和電動滑板車驅動模型導入集成為試驗場景;⑥試驗參數設置頁面構建;⑦接入VR設備;⑧最終發布成可執行文件[5-6]。
3 三維模型構建
3.1 試驗場景模型的構建
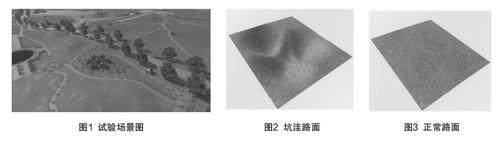
本試驗場景是:電動滑板車在公園主道路進行騎行。試驗場景模型主要起到豐富場景的作用,對模型的尺寸精度要求不高,可以利用貼圖代替模型部分細節特征,因此選用3ds Max軟件創建模型。首先利用3ds Max建立公園的基本模型,對于較細節的部分,采用紋理映射的方法,使用紋理圖片取代詳細模型,最后將創建好的模型導入Unity3D搭建場景。為了提高試驗的隨機性,將道路上的坑洼單獨設置成為可配置選項(即坑洼路面/正常路面)如圖1、圖2和圖3所示,根據試驗參數可動態地分配在道路中。
3.2 電動滑板車模型構建
試驗系統基于電動滑板車模擬真實騎行體驗,為了提升試驗者的真實感,建立虛擬模型來映射電動滑板車的騎行狀態。將電動滑板車結構分為車輪、底座和手柄桿三部分進行建模,如圖4所示。
3.3 虛擬人物模型構建
為了增加場景的真實性以及模擬真實騎行體驗,選擇引入虛擬人物模型實時同步試驗人員的騎行行為和模擬人員在道路上行走以及騎行狀態。選用3ds Max軟件建立虛擬人物的幾何模型和動作模型。在3ds Max中,利用角色動畫CAT工具包建立人體骨骼模型,利用多邊形結構建立人體表面模型,再進行紋理貼圖,最后創建人物站立、行走、騎行、摔倒等行為動畫。創建完成的部分虛擬人物模型如圖5所示。
4 數據采集過程與分析
4.1 數據采集實現
模擬真實騎行狀態,本質上就是要建立滑板車模擬器與安全風險試驗系統的映射關系,兩者映射的紐帶為滑板車模擬器的實時數據。通過采集實時數據,實現兩者的映射交互。(1)數據需求分析。在騎行過程中需要獲取的騎行數據主要為轉向角度、實時速度、油門百分比、剎車百分比。(2)數據通信實現。數據通信也稱數據交換,指將數據從一個系統傳輸至另一個系統的過程。電動滑板車模擬器采用串口通信來實現數據交互。(3)通訊協議確定。通訊波特率:9600;數據位:8位;停止位:1位。數據格式采用Hex(十六進制數據),通訊采用應答方式,主機問一次,滑板車應答一次。
4.2 數據驅動實現
基于獲取到的電動滑板車模擬器的實時速度、轉向角度、剎車百分比和油門百分比。建立一個滑板車圖案(S co oter)作為模型的父物體,將車輪、底座和手柄桿作為子物體。Unity軟件里的WheelCollider(車輪碰撞器)是一種特殊的地面車輛碰撞器,它具有內置的碰撞金測、車輪物理引擎和一個基于滑移的輪胎摩擦模型。WheelCollider是專門為有輪子的車輛所做的設計,因此采用WheelCollider來設置滑板車輪胎的運動和地面的碰撞。通過控制wheelCollider的motorTorque值來控制加速/減速。在滑板車模型上添加Rigidbody組件,通過獲取Rigidbody的velocity值來控制速度值。
4.3 可視化界面
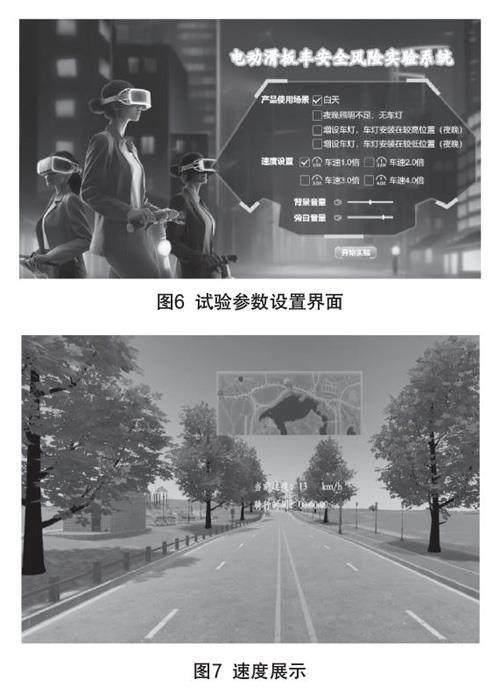
本系統界面的主要作用是實現試驗參數設置以及試驗過程騎行數據的展示交互。通過選擇不同的試驗參數,進入相應的試驗場景。交互界面設計為兩個主模塊,一個是試驗參數設置模塊,另一個是騎行過程數據展示模塊。
在虛擬場景中添加名為Menu的Canvas組件,設置渲染模式為World Space,使畫布渲染于世界坐標系,在Menu下添加不同的Button控件、Text控件和Image控件,調整各個控件到合適位置,設置相應參數,創建完成的試驗參數設置界面如圖6所示。模擬時獲取實時速度并展示,如圖7所示。
5 結 語
通過情景模擬平臺的軟硬件系統及場景三維建模分析,構建了電動滑板車風險試驗系統。軟件主要用于電動滑板車騎行試驗,得出在不同試驗場景下,電動滑板車的安全騎行速度。通過構建與現實場景同等比例模型提高試驗真實參與感。軟件不僅提供多個試驗場景滿足試驗需求,在試驗場景中設置行人、路障等要素,同時實時采集電動滑板車模擬器的騎行數據,更好地模擬出真實騎行道路狀況。試驗者通過佩戴VR設備即可開始騎行試驗,根據試驗者的騎行速度與遇到道路狀況的處置行為,軟件會反饋相應的結果顯示,達到更好的交互體驗。
參考文獻
[1]陳治灸,陳洋,李倩倩,等.基于用戶體驗的電動滑板車設計研究[J].包裝工程,2020,41(18):207-213.
[2]錢曉波,張凌浩,陳香.基于門徑管理模型的電動滑板車概念設計[J].機械設計,2015,32(12):116-119.
[3]劉延柱.自平衡獨輪滑板車的動力學分析[J].力學與實踐,2021,43(6):1002- 1005.
[4]戈秋虞,徐藝諾, 邱榮祖,等. 基于系統動力學的城市客運交通減碳情景模擬研究[ J ] .氣候變化研究進展,2023,19(3):357-370.
[5]張沛朋,李俊雅.虛擬現實場景下的精準化采摘機器人作業研究[J].農機化研究,2024,46(6):210-213.
[6]葉家杰,黃菊清,蕭蕾. 基于虛擬現實技術的高校校園生活區種植場景環境恢復性效益研究[ J ] .中國園林,2023,39(11):97-103.
作者簡介
劉霞,博士,研究員,從事消費品安全標準化及監管制度、產品安全風險管理研究工作。
(責任編輯:張佩玉)
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 15:36:30
現代經濟信息(2016年19期)2016-10-20 15:20:15
中國科技博覽(2016年18期)2016-10-19 06:47:57
中國市場(2016年33期)2016-10-18 13:14:16
中國市場(2016年33期)2016-10-18 13:13:33
中國市場(2016年33期)2016-10-18 12:55:28
商(2016年27期)2016-10-17 06:18:10
商(2016年27期)2016-10-17 05:41:05
商(2016年27期)2016-10-17 05:33:32
大眾理財顧問(2016年9期)2016-10-11 17:05:02