高壓斷路器操動機構驅動電機及其控制技術研究
2024-06-06 00:00:00王奕飛林莘徐建源厲偉
電機與控制學報 2024年1期



摘"要:
高壓斷路器操動機構用電機驅動提高了斷路器運行的可靠性與可控性,因此設計了一套適用于126 kV真空斷路器的電機操動機構。基于操動機構動力學分析結果確定驅動電機轉矩、轉速要求,提出一種有限轉角永磁無刷電機設計方案,研制樣機進行聯機試驗完成動作要求檢驗。在此基礎上,設計分段轉矩控制策略,結合驅動電機輸出轉矩需求將操動機構的運動過程分為4個階段,從降低觸頭碰撞、避免預擊穿現象發生、提高斷路器工作可靠性角度對各階段電機輸出轉矩進行動態調節。結果表明:所研制的驅動電機配合分段轉矩控制策略,在保證滅弧室對操動機構動作時間、動作速度要求的前提下,實現了操動機構的運動過程優化和工作可靠性提高,促進了斷路器智能化操作進程。
關鍵詞:高壓斷路器;操動機構;驅動電機;分段轉矩控制;智能化操作;試驗驗證
DOI:10.15938/j.emc.2024.01.010
中圖分類號:TM561
文獻標志碼:A
文章編號:1007-449X(2024)01-0095-10
Motor design and control technology of highvoltage circuit breaker operating device
WANG Yifei,"LIN Xin,"XU Jianyuan,"LI Wei
(School of Electric Engineering, Shenyang University of Technology, Shenyang 110870, China)
Abstract:
The motordriven operating device of highvoltage circuit breakers improves the reliability and controllability of circuit breaker operation. A set of motordriven operating device for 126 kV vacuum circuit breaker was designed. Based on the driving motor torque and speed requirements determined by the kinetic analysis of the actuator, a finite angle permanent magnet brushless motor design was proposed, and a prototype was developed for inline testing to complete the action requirement test. On this basis, the segmented torque control strategy was designed to combine the output torque requirements of the drive motor to divide the motion process of the operating device into four stages, and dynamically adjust the output torque of the motor in each stage from the perspective of reducing contact collision, avoiding prearcing and improving the working reliability of the circuit breaker. The results show that the developed drive motor with segmental torque control strategy can optimize the motion process and improve the reliability of the operating device and promote the intelligent operation of the circuit breaker, while ensuring the interrupter’s requirements for the operating time and speed of the operating device.
Keywords:high voltage circuit breaker; operating device; drive motor; segmental torque control; intelligent operation; test verification
0"引"言
電機操動機構采用電機直驅,傳動結構簡單,利用電機良好的伺服性能可實現對開斷和關合過程的調節與控制,獲得理想的斷路器開關特性,是解決傳統操動機構結構復雜、工作可靠性和運動可控性不佳的有效途徑,符合斷路器智能化操作的發展方向[1-5]。
當前,高壓斷路器電機操動機構的研究重點主要集中在驅動電機設計與電機控制方法的研究上:
1)驅動電機設計。文獻[6-7]針對驅動電機的定子結構進行了研究,分析了多槽結構和少槽結構對驅動電機性能的影響,結合仿真對比發現,多槽定子結構電機齒槽轉矩脈動小,更加有利于電機的控制,為驅動電機定子結構的選取提供了依據。文獻[8]針對電機操動機構設計了一臺永磁無刷直流電機,采用多數槽定子結構,永磁體采用普通表貼埋入方式安裝在轉子表面,與一臺40.5 kV SF6斷路器進行了聯機試驗,驗證了驅動電機設計的合理性。文獻[9]通過多次試驗發現,分/合閘結束時操動機構與機械限位裝置的機械碰撞會導致采用表貼埋入方式安裝的永磁體出現松動、脫落等現象,影響斷路器工作可靠性。為此,提出了3種不同轉子結構,通過改變永磁體與轉子之間的裝配關系來改善此問題,并進行了對比仿真分析。
2)電機控制方法。文獻[10-12]針對斷路器滅弧室對操動機構的動作要求,預設了電機動作目標軌跡,將現有的電機智能控制算法應用于操動機構驅動電機上,使電機完成對目標軌跡的跟蹤控制。但是,斷路器幾十毫秒的分/合閘動作時間使電機始終處于啟動、短時工作狀態,電機內部的電磁關系并未穩定建立,控制參數計算所需的電機數學模型會與理論存在一定偏差,電機在毫秒級時間內保證目標軌跡的跟蹤精確度,實際應用中存在一定難度。文獻[13-14]考慮到上述問題,在550 kV GIS中隔離開關和126 kV SF6斷路器電機操動機構的控制方法中沒有采用固定軌跡跟蹤的控制思路,而是結合斷路器智能化操動的要求,設計分段控制策略。在操動機構運動的起始階段、緩沖階段有針對性地增加和減小電機輸入給定量,目的是保證分/合閘速度的同時降低分/合閘結束時操動機構的機械沖擊。這種控制思路調試簡單,工程上實現相對容易。但是,滅弧室開距、超程與操動機構傳動結構不同,對驅動電機的出力要求也略有不同,分段控制策略需要針對負載變化情況與操動機構的動作要求做相應調整,而現有研究并未對此進行深入分析。電機操動機構應用于真空斷路器相比于隔離開關和SF6斷路器驅動電機的負載特性與動作要求并不相同,若操動機構、斷路器以及控制策略之間的匹配不合理,容易引起操動機構機械碰撞加劇、觸頭彈跳、預擊穿等現象的出現,影響斷路器的工作可靠性。
基于當前研究現狀,本文首先通過對126 kV真空斷路器電機操動機構的負載特性進行分析,確定作為操動機構驅動電機所需滿足的轉矩、轉速要求。提出一種有限轉角永磁無刷電機設計方案,研制樣機與斷路器進行聯機試驗,證明驅動電機的輸出轉速與出力特性均可以滿足滅弧室對操動機構的動作要求。其次,結合分段控制思想,根據驅動電機輸出轉矩需求,設計分段轉矩控制策略,將操動機構運動過程進一步劃分為啟動階段、合閘階段、超程階段和緩沖階段,分段調節電機輸出轉矩。目的是降低觸頭碰撞、避免預擊穿現象發生、提高斷路器工作可靠性。最后,在驅動電機-斷路器-控制策略的配合試驗中完成對整套電機操動機構運動過程優化以及提升工作可靠性方面的檢驗。
1"126 kV真空斷路器電機操動機構
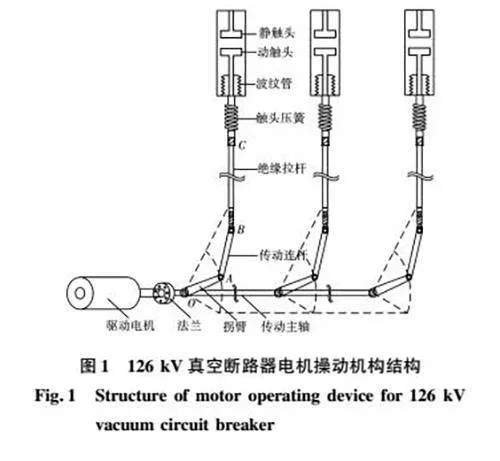
126 kV真空斷路器電機操動機構結構如圖1所示。位于邊相的一臺電機通過法蘭盤直接驅動傳動主軸,帶動拐臂、傳動連桿、絕緣拉桿構成的傳動機構將電機的旋轉運動轉換為動觸頭的直線運動,實現斷路器的分/合閘操作。
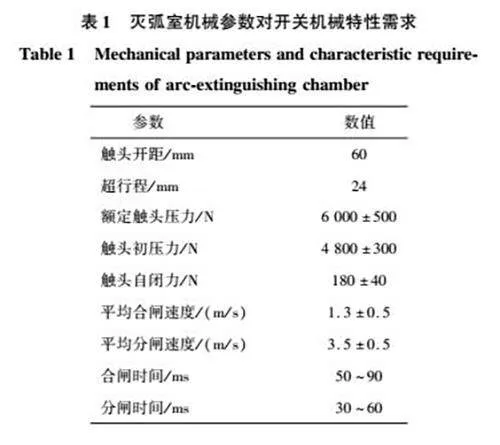
斷路器真空滅弧室的主要參數如表1所示,其中:平均合閘速度指操動機構從30%開距至觸頭閉合位置行程內的平均速度;平均分閘速度指從觸頭閉合位置至75%開距行程內的平均速度。
2"操動機構動力學分析
2.1"運動過程分析
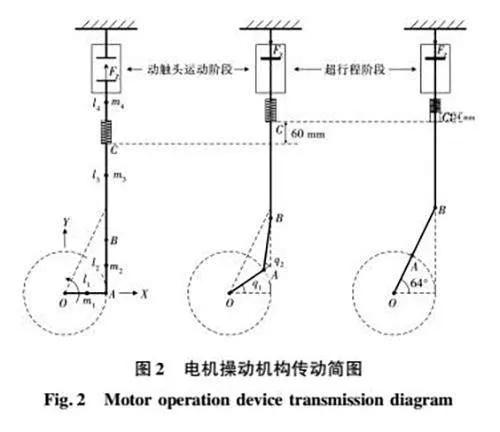
根據表1中觸頭開距60 mm,超行程24 mm的操動機構運動要求,設計拐臂長度為109.2 mm,傳動連桿長度為139.9 mm。拐臂在電機的驅動下由水平位置逆時針旋轉至34°時,操動機構完成開距階段運動,繼續旋轉30°與水平位置夾角為64°時,操動機構完成超行程階段運動,合閘過程結束。此時,拐臂與傳動連桿成一條直線,利用電機驅動力與傳動機構死點位置實現斷路器的合閘保持,具體過程如圖2所示。操動機構的分閘過程與此相反。
2.2"負載特性分析
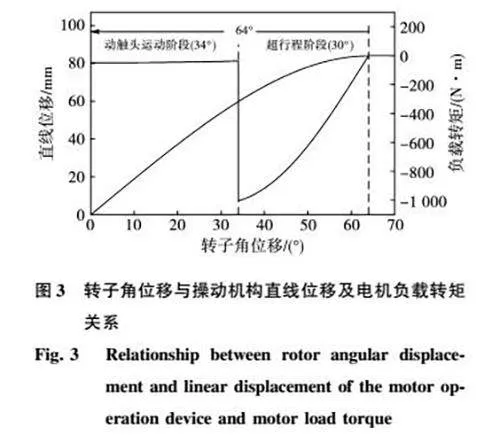
操動機構在動觸頭運動階段,驅動電機的負載特性受滅弧室自閉力和系統重力影響;在超行程階段,除自閉力和系統重力外,驅動電機還需克服觸頭壓簧的彈性反力作用。操動機構運動過程中電機轉子角位移與操動機構直線位移及驅動電機負載轉矩的關系如圖3所示。
從圖3可以看出,剛合閘瞬間由于觸頭壓簧的預緊力作用,電機負載轉矩發生突變,其最大值接近1 000 N·m,此值為驅動電機峰值轉矩輸出要求提供了依據。同時結合表1中滅弧室對操動機構的動作速度要求,可以計算出滿足平均分/合閘速度要求下驅動電機所需達到的平均合閘轉速為132 r/min,平均分閘轉速為212 r/min。
3"操動機構驅動電機設計
3.1"驅動電機結構設計
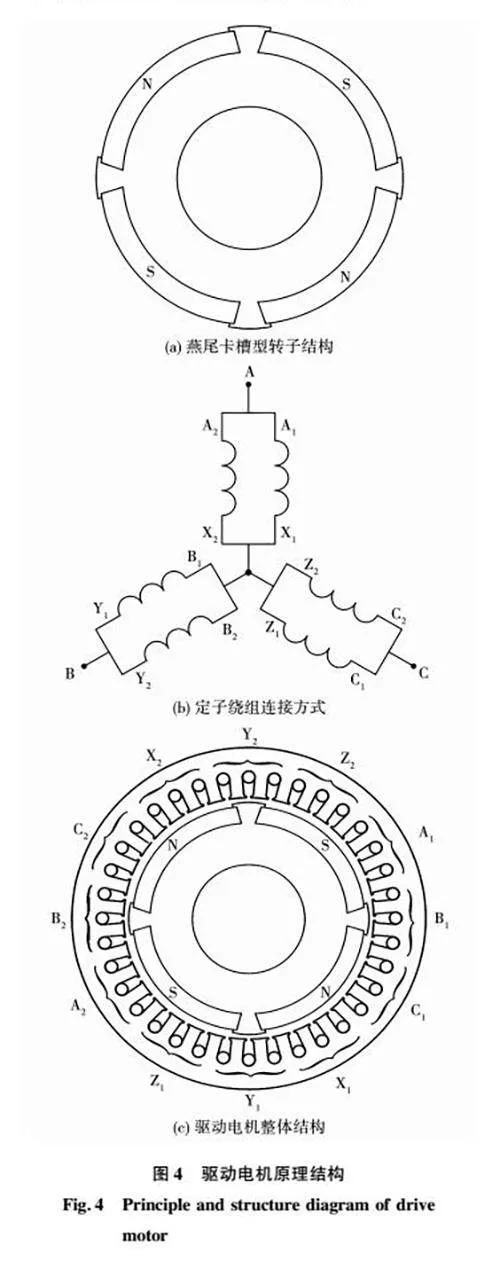
本文研制完成了一臺3相、4極、36槽圓筒形定子外殼、內轉子結構有限轉角永磁無刷電機。
轉子材料選用10號鋼,永磁材料選用N40型釹鐵硼永磁體,采用瓦形徑向充磁結構。設計燕尾卡槽型轉子結構改變永磁體與轉子表面的裝配關系,通過將永磁體外表面嵌入在燕尾卡槽內,改善操動機構在分合閘結束時與機械限位碰撞導致永磁體發生松動和脫落的問題,提高驅動電機工作可靠性。其結構如圖4(a)所示。
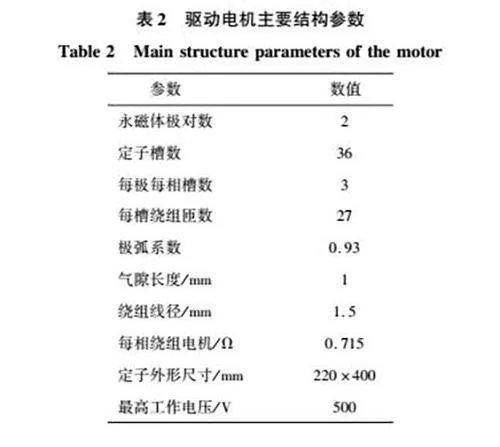
定子材料選用DW470硅鋼片,采用整數槽、多槽結構設計。電樞繞組為單層集中整距繞組排列方式,考慮到電機僅工作在啟動狀態,為加快電流上升速度,增大啟動轉矩,采用2套獨立線圈并聯結構,其接線方式如圖4(b)所示。驅動電機整體結構如圖4(c)所示,詳細結構參數列于表2。
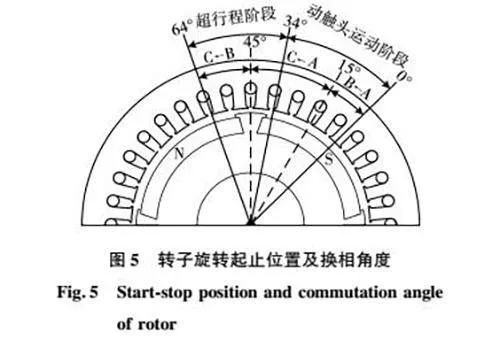
電機轉子初始位置及具體換相過程如圖5所示,進行合閘操作時,驅動電機逆時針旋轉,導通相依次為AB-AC-BC;分閘操作與此相反,驅動電機順時針旋轉CB-CA-BA相依次導通。整個分(合)閘過程,驅動電機經歷兩次換相,共旋轉64°。
3.2"動態仿真結果分析
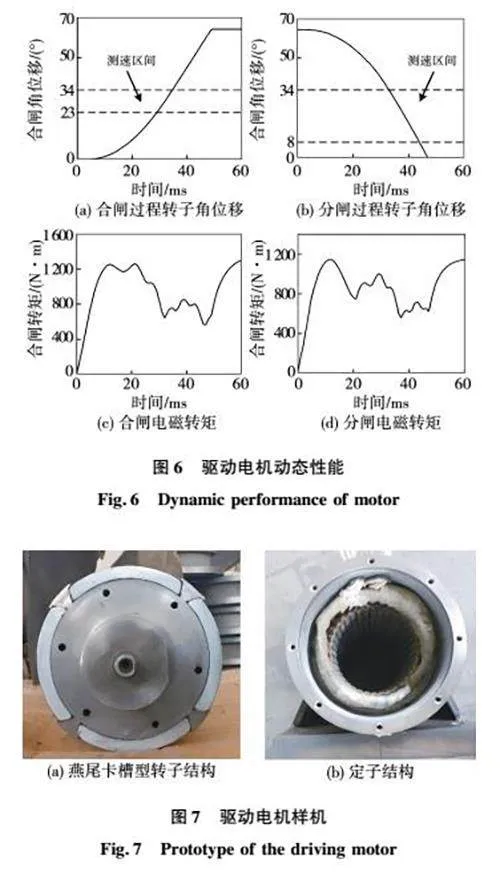
驅動電機動態仿真結果如圖6所示,可以看出,合閘時,整個過程持續48.8 ms,合閘時間為34.6 ms,最大電磁轉矩達到1 257 N·m,測速區間對應電機轉角范圍23°~34°,平均轉速為327 r/min,對應平均合閘速度3.21 m/s;分閘時,整個過程持續47 ms,分閘時間32.8 ms,最大電磁轉矩1 146 N·m,測速區間對應電機轉角范圍34°~8°,平均轉速為398 r/min,對應平均分閘速度4.13 m/s。
仿真結果表明,驅動電機可在規定時間內完成分/合閘操作,輸出電磁轉矩與測速區間內的平均轉速在滿足轉矩特性和滅弧室要求的前提下均留有足夠裕量,具備作為操動機構驅動電機的能力。驅動電機樣機如圖7所示。
4"聯機試驗
為驗證電機操動機構的分/合閘性能,搭建驅動電機-斷路器聯機試驗平臺,如圖8所示。操動機構由電容器組提供分/合閘能量,通過調壓器完成對充電電壓的預先調節。控制系統以數字信號處理器TMS320F28335為核心,經IGBT組成的三相全橋逆變電路對驅動電機進行控制。
試驗平臺中儲能電容器組由6個容量為0.022 F、額定電壓為450 V的電容并聯組成;驅動電機主軸上安裝有角位移傳感器,供電電源為DC 15 V,測量范圍360°;滅弧室動、靜觸頭的母線端子上連接有分/合閘檢測電路,供電電源為DC 15 V。
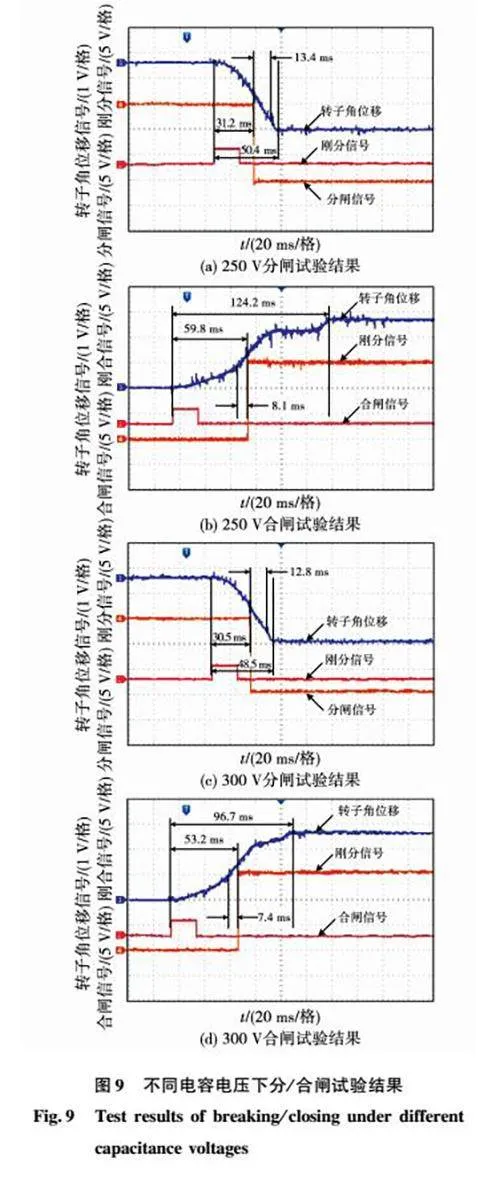
接下來分別進行了電容電壓為250、300 V的操動機構分/合閘性能測試試驗,結果如圖9所示。
試驗中,電容電壓為250、300 V時,操動機構完成整個分閘過程的時間分別為50.4、48.5 ms,分閘時間分別為31.2、30.5 ms,動觸頭從閉合位置運動至75%開距的時間為13.4、12.8 ms,對應平均分閘速度為3.36、3.52 m/s;完成整個合閘過程的時間分別為124.2、96.7 ms,合閘時間分別為59.8、53.2 ms,動觸頭從30%開距運動至觸頭閉合位置的時間為8.1、7.4 ms,對應平均合閘速度為2.22、2.43 m/s。試驗結果可以看出,電機操動機構可以順利完成分/合閘操作,電容電壓的改變有效影響了操動機構的動作時間與動作速度,體現出驅動電機良好的動態性能。同時在分/合閘結束時操動機構在分/合閘位置上可靠保持,沒有引起明顯的彈跳與過沖,驗證了整套電機操動機構設計的合理性。
進一步分析試驗結果可以發現,操動機構的分閘時間與分閘速度可以滿足滅弧室對開關機械的特性需求;而合閘試驗中,平均合閘速度高于表1中滅弧室的參數要求,較高的平均合閘速度雖然可以縮短預擊穿時間,但也一定程度上加劇了觸頭之間的碰撞損耗。同時,合閘超程階段觸頭壓簧引起的電機負載轉矩變化使角位移曲線在52°附近出現了明顯波動,并在合閘末期出現了上揚現象。合閘末期的角位移曲線上揚現象意味著電機轉速的上升會加劇合閘結束時操動機構與機械限位之間的機械碰撞。因此,為改善操動機構的合閘性能,提高斷路器的工作可靠性,有必要調整控制方式,優化合閘過程。
5"分段轉矩控制策略
合閘角位移曲線之所以會出現波動是由于固定電壓控制方式下,電機輸出轉矩無法動態調節,運動過程受負載變化影響所致。通過對動作曲線的預先規劃,計算出滿足動作要求的驅動電機輸出轉矩,通過分段調節逆變電路中功率管驅動信號占空比的方式,實現分段轉矩控制,完成對操動機構的運動過程優化[15]。
5.1"動作曲線規劃
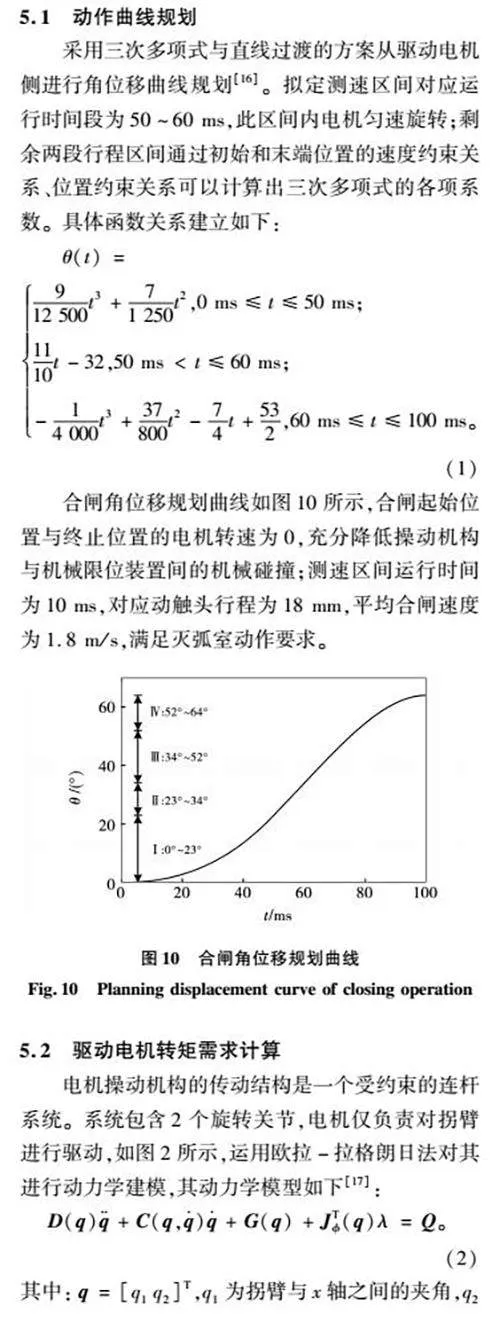
采用三次多項式與直線過渡的方案從驅動電機側進行角位移曲線規劃[16]。擬定測速區間對應運行時間段為50~60 ms,此區間內電機勻速旋轉;剩余兩段行程區間通過初始和末端位置的速度約束關系、位置約束關系可以計算出三次多項式的各項系數。具體函數關系建立如下:
合閘角位移規劃曲線如圖10所示,合閘起始位置與終止位置的電機轉速為0,充分降低操動機構與機械限位裝置間的機械碰撞;測速區間運行時間為10 ms,對應動觸頭行程為18 mm,平均合閘速度為1.8 m/s,滿足滅弧室動作要求。
5.2"驅動電機轉矩需求計算
電機操動機構的傳動結構是一個受約束的連桿系統。系統包含2個旋轉關節,電機僅負責對拐臂進行驅動,如圖2所示,運用歐拉-拉格朗日法對其進行動力學建模,其動力學模型如下[17]:
其中:q=[q1 q2]T,q1為拐臂與x軸之間的夾角,q2為連桿與拐臂之間的夾角;D(q)為2×2階正定慣性矩陣;C(q,q·)為2×2階離心力和哥氏力項;G(q)為2×1階重力項;JT(q)為約束矩陣的Jacobian信息;λ為拉格朗日乘子;Q為廣義力向量,各矩陣具體形式為:
式中:p1~p5為系統動力學參數組成的表達式[17],p1=(m2+mv)l21+m1l2c1+I1,p2=mvl22+m1l2c2+I2,p3=(mvl2+m2lc2)l1,p4=(m2+mv)l1+m1lc1,p5=mvl2+m2lc2;m1、m2、l1、l2、lc1、lc2、I1、I2分別為拐臂和傳動連桿的質量、長度、質心到端點的距離和各自繞質心的轉動慣量,mv在動觸頭運動階段(q1lt;34°)為絕緣拉桿和滅弧室中運動部件的質量和,在超行程階段(q1≥34°)為絕緣拉桿的質量;ps1、ps2為觸頭壓簧引起的彈性勢能變化量,其值在動觸頭運動階段均為0,超行程階段ps1=kΔx[l1cosq1+l2cos(q1+q2)],ps2=kΔxl2cos(q1+q2),k為彈簧的勁度系數,Δx為彈簧壓縮量,其值在動觸頭運動階段為定值Δx1,用來提供預緊力,在超行程階段壓縮量逐漸變化為Δx1+sinq1+l2sin(q1+q2)-l2。
由于動觸頭只能在豎直方向運動,因此系統的自由度為1,可通過約束條件對系統進行降階[18]。取q1為描述約束運動的變量,q2為剩余冗余變量,由圖2可知q1和q2的約束關系為
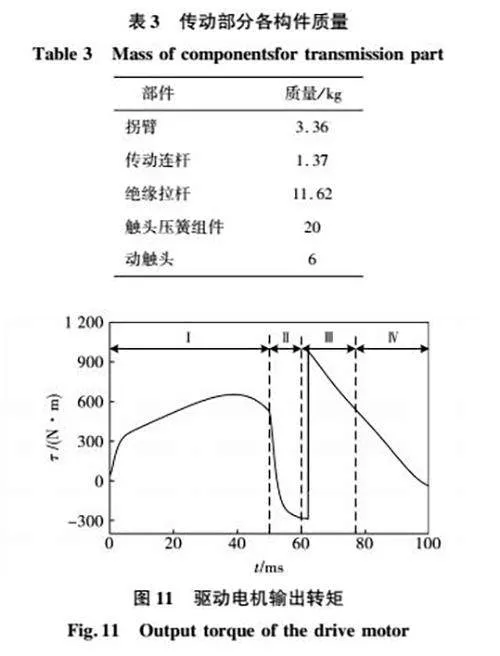
操動機構傳動部分各構件質量如表3所示,并將式(9)和式(1)中規劃行程曲線的q1、q·1、q··1信息代入式(2)即可得出滿足動作要求的驅動電機輸出轉矩,如圖11所示。
5.3"控制策略設計
本文將斷路器的合閘過程劃分為4個階段,分別為Ⅰ:啟動階段、Ⅱ:合閘階段、Ⅲ:超程階段、Ⅳ:緩沖階段,如圖10所示。依據圖11的驅動電機輸出轉矩需求,將各階段的轉矩調控策略設計如下:
1)啟動階段:設計為合閘測速起始位置之前對應的電機轉角范圍。此階段電機負載轉矩較小,電機轉矩需求維持在驅動電機最大輸出轉矩一半附近,因此可將驅動信號占空比設計在0.5~1之間。同時對控制占比的適當限制可減少電容中能量消耗,保證系統有足夠儲能完成超程階段運動[13-14]。
2)合閘階段:設計為測速區間對應的電機轉角范圍。該階段既要保證合閘速度避免預擊穿現象發生,同時又要考慮降低合閘時的觸頭機械碰撞[20]。結合此階段明顯減小的電機轉矩需求,將驅動信號控制占比設計在0~0.5之間。
3)超程階段:設計為合閘位置至角位移曲線出現明顯波動位置時的角度區間。此階段由于觸頭壓簧引起的負載轉矩變化,使電機轉矩需求瞬間增加,并接近轉矩輸出峰值,因此應將驅動信號控制占比設置為1,保證電機有足夠轉矩輸出完成超程階段運動。
4)緩沖階段:應配合逐漸減小的電機轉矩需求,降低轉矩輸出,避免合閘末期電機轉速上升現象出現。同時較小的輸出轉矩可以降低操動機構與機械限位之間的碰撞,提高斷路器工作可靠性。驅動信號占空比應設置在0~0.5之間。
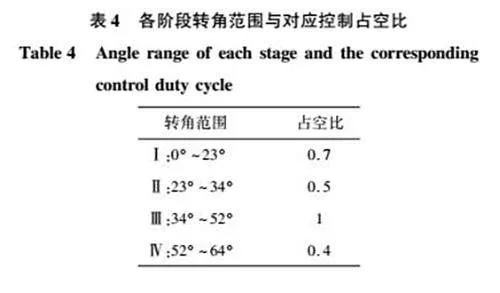
各階段控制占比具體數值可通過試驗確定,本文在電容電壓充至400 V的情況下合閘,各階段具體轉角劃分與相應控制占空比設置如表4所示。
5.4"試驗研究
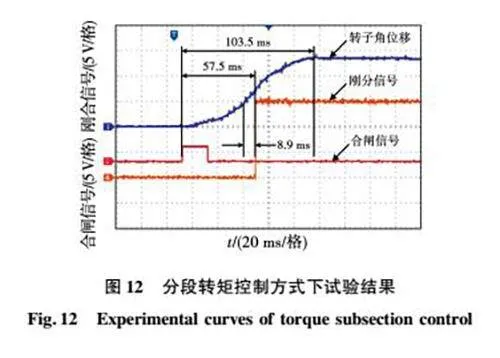
圖12為分段轉矩控制方式下的試驗結果,合閘時間為57.5 ms,平均合閘速度為2.02 m/s。合閘階段控制占比的降低使平均合閘速度相比于300 V和250 V固定電壓控制方式下分別下降了0.41 m/s和0.20 m/s。雖然略高于滅弧室要求,但考慮到合閘試驗是在斷路器空載運行時進行的,而事實上斷路器在執行合閘操作時,動觸頭會因預擊穿現象的發生受到與運動方向相反的電動力作用,引起合閘速度下降。因此,空載情況下稍高的合閘速度對于保證實際運行中斷路器的合閘速度滿足滅弧室要求是有一定積極意義的[21-22]。超程階段功率管的完全導通保證了電機轉矩的有效輸出,同時配合緩沖階段較小的控制占比在保證斷路器可靠合閘的前提下有效解決了角位移曲線上揚問題。分段轉矩控制策略下整個合閘過程角位移曲線平滑無波動,有效降低了剛合速度與合閘結束速度,實現了對操動機構的運動過程優化和工作可靠性提高,體現出控制策略的有效性。
6"結"論
本文設計了一套適用于126 kV真空斷路器的電機操動機構,從提高斷路器工作可靠性、優化操動機構運動過程角度完成了驅動電機設計與控制策略研究,主要結論如下:
1)完成操動機構驅動電機樣機研制,設計燕尾卡槽型轉子結構提高電機工作可靠性。聯機試驗下試驗樣機施加電壓高于250 V時,操動機構合閘時間小于59.8 ms,平均合閘速度高于2.22 m/s;分閘時間小于31.2 ms,平均分閘速度高于3.36 m/s。
2)將驅動電機在0°~23°、23°~34°、34°~52°、52°~64° 4個轉角區間的控制占比設置為0.7、0.5、1、0.4時,操動機構的合閘時間為57.5 ms,平均合閘速度為2.02 m/s,相比于300、250 V固定電壓控制方式下分別下降了0.41 m/s和0.20 m/s。
3)分段轉矩控制策略改善了固定電壓控制方式下合閘速度較高與合閘末期電機轉速上升問題,提高了斷路器的工作可靠性,實現了操動機構的運動過程優化。
參 考 文 獻:
[1]"林莘. 現代高壓電器技術[M]. 北京: 機械工程出版社, 2011.
[2]"徐國政, 張節容, 錢家驪, 等. 高壓斷路器原理和應用[M].北京:清華大學出版社, 2000.
[3]"林莘, 王德順, 徐建源, 等. 高壓斷路器直線伺服電機操動機構及其控制技術[J]. 中國電機工程學報,2008,28(27): 137.
LIN Xin, WANG Deshun, XU Jianyuan. Linear servo motor operating mechanism and control technique for highvoltage circuit breaker[J]. Proceedings of the CSEE, 2008, 28(27): 137.
[4]"孫麗瓊, 王振興, 何塞楠, 等. 126 kV真空斷路器分離磁路式永磁操動機構[J]. 電工技術學報, 2015, 30(20):49.SUN Liqiong, WANG Zhenxing, HE Sainan, et al. A permanent magnetic actuator with separated magnetic circuit for 126 kV vacuum circuit breaker[J]. Transactions of China Electrotechnical Society,2015, 30(20): 49.
[5]"鄒積巖, 劉曉明, 于德恩. 基于智能模塊的高壓直流真空斷路器研究[J]. 電工技術學報, 2015,30(13):47.
ZOU Jiyan, LIU Xiaoming, YU Deen. Investigations on the HVDC vacuum circuit breaker based on intelligent models [J]. Transactions of China Electrotechnical Society,2015,30(13):47.
[6]"李永祥, 林莘, 徐建源. 高壓斷路器有限轉角永磁電機操動機構兩種定子結構[J]. 電工技術學報, 2010, 25(5): 61.
LI Yongxiang, LIN Xin, XU Jianyuan. Two stator structures of limited angle permanent magnet motors for operating mechanism on high voltage circuit breaker [J]. Transactions of China Electrotechnical Society, 2010, 25(5): 61.
[7]"林莘, 馬躍乾, 徐建源, 等. 高壓斷路器新型操動機構驅動電機設計分析[J]. 沈陽工業大學學報, 2008, 30(2): 129.
LIN Xin, MA Yueqian, XU Jianyuan, et al. Designand analysis of novel operating mechanism drive motor for high voltage circuit breaker [J]. Journal of Shenyang University of Technology, 2008, 30(2):129.
[8]"蘆宇峰, 孟大偉, 徐永明, 等. SF6高壓斷路器智能化操動機構的研究與優化[J]. 電機與控制學報, 2013,17(7): 94.
LU Yufeng, MENG Dawei, XU Yongming, et al. Research and optimization of intelligent operating mechanism for SF6 high voltage circuit breaker[J]. Electric Machines and Control, 2013, 17(7): 94.
[9]"王亮, 荊瀾濤, 許東, 等. 高壓真空斷路器電機操動機構轉子設計仿真研究[J].高壓電器, 2017,53(2):61.
WANG Liang, JING Lantao, XU dong, et al. Improvement and simulation of the motor actuator rotor for high voltage vacuum[J]. High Voltage Apparatus, 2017, 53(2): 61.
[10]"王亮. 高壓真空斷路器電機操動機構及模糊控制研究[D]. 沈陽: 沈陽工業大學, 2014.
[11]"史可鑒. GIS中隔離開關電機操動機構及控制方法研究[D]. 沈陽: 沈陽工業大學, 2016.
[12]"何保營, 韓國輝, 耿英三, 等. 新型126 kV電機直驅高壓真空斷路器伺服控制系統研究[J]. 高壓電器, 2020, 56(8): 92.
HE Baoying, HAN Guohui, GENG Yingsan, et al. Novel servo control system for 126 kV directdriven highvoltage vacuum circuit breaker[J].High Voltage Apparatus, 2020, 56(8): 92.
[13]"史可鑒, 林莘, 徐建源. 550 kV GIS中隔離開關電機操動機構分段式控制方法的研究[C]// 中國電機工程學會高電壓專業委員會學術年會, 2015年10月15日, 西安, 中國. 2015: 1-7.
[14]"鄧赟, 武建文, 金鑫晨, 等. 基于高壓斷路器電機操動機構的位移分段控制策略[J].電工技術學報,2018,33(15):3586.
DENG Yun, WU Jianwen, JIN Xinchen, et al.Displacement subsection control strategy based on motor operating device of high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3586.
[15]"呂帥帥, 林輝, 馬冬麒. 基于最優占空比調制的永磁同步電機直接轉矩控制[J]. 電工技術學報, 2015, 30(S1): 35.
L Shuaishuai, LIN Hui, MA Donglin. Direct torque control for permanent magnet synchronous motor with optimal duty cycle control[J]. Transactions of China Electrotechnical Society, 2015, 30(S1):35.
[16]"楊銳, 劉宇, 韓書謨, 等. 126 kV真空斷路器電機驅動負載需求分析與優化[J]. 高壓電器, 2020, 56(8):100.
YANG Rui, LIU Yu, HAN Shumo, et al. Analysis and optimization of load torque demand of 126 kV vacuum circuit breaker based on motor driving[J]. High Voltage Apparatus, 2020, 56(8): 100.
[17]"牛瑞燕, 許午嘯, 劉金琨. 欠驅動機械臂滑模控制與實驗研究[J]. 儀器儀表學報, 2016, 37(2): 348.
NIU Ruiyan, XU Wuxiao, LIU Jinkun. Sliding mode control and experiment study for underactuated manipulator[J]. Chinese Journal of Scientific Instrument, 2016, 37(2): 348.
[18]"盛洋, 賴旭芝, 吳敏. 基于模型降階的平面三連桿欠驅動機械系統位置控制[J]. 自動化學報, 2014, 40(7): 1303.
SHENG Yang, LAI Xuzhi, WU Min. Position control of a planar threelink underactuated mechnaical system based on model reduction[J]. Acta Automatica Sinica, 2014, 40(7): 1303.
[19]"HSU Y L, FUNG R F. Mathematical modelling and twostage identification for a motortoggle mechanism with clamping effect[J].Applied Mathematical Modelling,2016,40(19):8660.
[20]"LOU J, LIU A, YU S.A reliable and controllable motor actuator without permanent magnetic for 40.5 kV vacuum circuit breakers[J].IEEE Transactions on Industry Applications, 2019, 56(2): 1218.
[21]"楊武, 榮命哲, 王小華, 等. 考慮電動力效應的高壓斷路器動力學特性仿真分析[J]. 中國電機工程學報,2003, 23(5): 104.
YANG Wu, RONG Mingzhe, WANG Xiaohua, et al. Dynamic simulation of highvoltage circuit breaker concerning electrodynamic force[J]. Proceedings of the CSEE, 2003, 23(5): 104.
[22]"羅禮全, 謝將劍, 王毅. 永磁真空斷路器預擊穿特性實驗研究[J]. 高電壓技術, 2012, 38(4): 899.
LUO Liquan, XIE Jiangjian, WANG Yi. Experimental study on prebreakdown character of permanent magnetic actuator vacuum breaker[J]. High Voltage Engineering, 2012, 38(4): 899.
(編輯:邱赫男)
收稿日期: 2022-06-24
基金項目:國家自然科學基金(51777130)
作者簡介:王奕飛(1989—),男,博士研究生,研究方向為操動機構及其控制技術;
林"莘(1961—),女,博士,教授,博士生導師,研究方向為高壓電器及其智能化技術;
徐建源(1962—),男,博士,教授,博士生導師,研究方向為高壓電器及其智能化技術、電力系統分析及配電網自動化;
厲"偉(1962—),男,博士,教授,博士生導師,研究方向為高電壓試驗及新能源并網技術。
通信作者:王奕飛
