基于嵌套網(wǎng)格的某頭罩分離裝置分離數(shù)值仿真
2024-06-24 04:30:48田霖于建軍亢瑋冬杜云鵬王冀鈺
科技風(fēng) 2024年6期
田霖 于建軍 亢瑋冬 杜云鵬 王冀鈺
摘 要:由于飛行速度較大,超聲速彈藥頭部受熱嚴(yán)重,常常采用頭罩分離技術(shù)對彈道末段的精確制導(dǎo)進(jìn)行保障。本文利用結(jié)構(gòu)嵌套網(wǎng)格并耦合6DOF運(yùn)動方程,對某頭罩分離裝置的地面分離試驗狀態(tài)、真實(shí)飛行狀態(tài)分離過程進(jìn)行了數(shù)值模擬,結(jié)合地面分離試驗驗證了理論方法的可行性,并對兩種狀態(tài)下的頭罩分離運(yùn)動進(jìn)行了對比分析。結(jié)果表明:數(shù)值模擬頭罩分離可以清晰直觀地得到頭罩分離運(yùn)動的姿態(tài)特性、分離軌跡以及流場特性;在分離初期,頭罩受到的氣動阻力會阻礙頭罩與導(dǎo)引頭沿軸向的安全分離;一定的飛行攻角可以使頭罩在氣動升力的作用下快速完成徑向分離,有利于頭罩、導(dǎo)引頭安全分離。
關(guān)鍵詞:頭罩分離裝置;結(jié)構(gòu)嵌套網(wǎng)格;氣動干擾;姿態(tài)運(yùn)動;數(shù)值模擬
中圖分類號:TJ011.2? ? ? ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識碼:A
1 概述
國際武器裝備系統(tǒng)對高精準(zhǔn)打擊目標(biāo)不斷提出新的要求,越來越多的國家開始研制帶有制導(dǎo)能力的飛行器。由于飛行速度的不斷提高,飛行器頭部的導(dǎo)引頭受到氣動力和熱環(huán)境愈發(fā)惡劣,常常需要防護(hù)罩對精密易碎的導(dǎo)引頭進(jìn)行有效保護(hù),以此提高自身的突防能力。飛行器到達(dá)既定目標(biāo)攻擊區(qū)域后,防護(hù)罩被拋開,啟動導(dǎo)引頭精確制導(dǎo)搜尋目標(biāo)[1-2]。縱觀國內(nèi)外,被廣泛研究并應(yīng)用的拋罩方式有主動式整體拋罩、主動式破碎拋罩、主動式分瓣拋罩、被動式分瓣拋罩等[2]。本文研究的某頭罩分離裝置為主動式整體拋罩方式:防護(hù)罩通過多個安全銷釘或者可以快速分離的機(jī)構(gòu)固定在飛行器頭罩的頭部殼體上,內(nèi)部由一個低壓氣源提供正向壓力。頭罩分離時通過作用在防護(hù)罩根部的正壓力,快速剪斷安全銷釘,使得防護(hù)罩迅速與彈體分離,高精度探測和目標(biāo)跟蹤的導(dǎo)引頭露出并開始工作[3]。在產(chǎn)品設(shè)計之初,常常依靠地面分離試驗來確定頭罩分離相關(guān)設(shè)計參數(shù),但地面試驗無法模擬頭罩分離時在實(shí)際飛行中受來流激波等影響。對于頭罩與導(dǎo)引頭之間存在的氣動干擾問題,地面試驗難以準(zhǔn)確預(yù)估。
近年來,隨著網(wǎng)格重構(gòu)技術(shù)、嵌套網(wǎng)格技術(shù)等計算流體力學(xué)數(shù)值模擬方法的發(fā)展,采用數(shù)值仿真手段對頭罩分離運(yùn)動進(jìn)行研究已經(jīng)具備條件。針對某頭罩分離裝置的分離過程,本文采用結(jié)構(gòu)嵌套網(wǎng)格技術(shù)對流場和六自由度運(yùn)動方程耦合計算,并與地面分離試驗結(jié)果進(jìn)行對比,分析了分離力、氣動力對頭罩姿態(tài)和運(yùn)動軌跡的影響,并給出了CFD計算的真實(shí)分離運(yùn)動和地面分離試驗測得的分離運(yùn)動的差異,為飛行器的頭罩分離總體方案設(shè)計和安全性評估提供支撐。
2 數(shù)值計算方法
2.1 N-S方程及離散方法
本文采用的控制方程為三維非定常可壓縮N-S方程:
式中:Ω為控制體體積;Q為守恒變量,F(xiàn)(Q)為對流項,H(Q)為黏性通量;S為控制體表面積;n為控制體邊界外法向單位向量;dV為體積微元;dS為面積微元。
2.2 頭罩運(yùn)動方程
對于研究頭罩與彈體相對運(yùn)動問題,需要將流體控制方程和剛體動力學(xué)方程進(jìn)行耦合求解,剛體的運(yùn)動特性是由其氣動載荷決定的,而氣動載荷的分布則通過流場求解來確定。本文采用6自由度剛體運(yùn)動方程組,建立包括質(zhì)心運(yùn)動動力學(xué)方程、繞軸轉(zhuǎn)動動力學(xué)方程、姿態(tài)角角速度方程組[4]。
(1)頭罩質(zhì)心運(yùn)動方程
式中:m為頭罩質(zhì)量,V為頭罩質(zhì)心的速度,F(xiàn)為作用于頭罩的外力。由式(2)可求得頭罩質(zhì)心運(yùn)動速度和加速度,進(jìn)而通過積分求解得到頭罩質(zhì)心位移。
(2)頭罩繞質(zhì)心運(yùn)動動力學(xué)方程
式中:H為頭罩對質(zhì)心的動量矩,ω為頭罩相對于地面坐標(biāo)系轉(zhuǎn)動的角速度。
(3)頭罩平移運(yùn)動學(xué)方程
式中:D為頭罩相對于地面坐標(biāo)系的位移矢量。
(4)頭罩轉(zhuǎn)動運(yùn)動學(xué)方程
(5)
式中:、、為頭罩繞頭罩坐標(biāo)系的俯仰角速度、偏航角速度、滾轉(zhuǎn)角速度。
本文使用的是Fluent 2021R1,采用S-A(Spalrt-Allmaras)湍流模型進(jìn)行流場計算。該模型只求解一個有關(guān)渦粘性的輸運(yùn)方程,計算量較小,可以較好地預(yù)測有逆壓梯度的邊界層問題,適用于具有壁面限制的流動問題,如飛行器、翼型繞流等,其數(shù)值模擬結(jié)果與試驗結(jié)果吻合度較高。
2.3 結(jié)構(gòu)嵌套網(wǎng)格技術(shù)
模擬多體運(yùn)動的嵌套網(wǎng)格主要由背景網(wǎng)格及組件網(wǎng)格構(gòu)成。每套網(wǎng)格需單獨(dú)劃分結(jié)構(gòu)化網(wǎng)格,并在Fluent中進(jìn)行插值,網(wǎng)格重疊的邊界處采用三線性差值的方式傳遞數(shù)據(jù)。組件網(wǎng)格運(yùn)動的過程中,每運(yùn)動一次都需要重新生成新的嵌套網(wǎng)格,保證生成網(wǎng)格具有高質(zhì)量。同時,可根據(jù)工程需要隨時更改組件形狀,提高網(wǎng)格生成效率。
3 頭罩分離過程的數(shù)值模擬
采用結(jié)構(gòu)嵌套網(wǎng)格技術(shù)對頭罩拋罩分離的兩種狀態(tài)進(jìn)行非定常數(shù)值模擬研究。第一種狀態(tài)為地面分離試驗的頭罩拋罩分離(以下簡稱工況A),第二種狀態(tài)為真實(shí)飛行時頭罩拋罩分離(以下簡稱工況B)。由于頭罩與導(dǎo)引頭之間的分離主要是沿軸向和徑向的,其滾轉(zhuǎn)和偏航運(yùn)動程度較小,因此頭罩的滾轉(zhuǎn)、偏航運(yùn)動可以忽略。
3.1 工況A
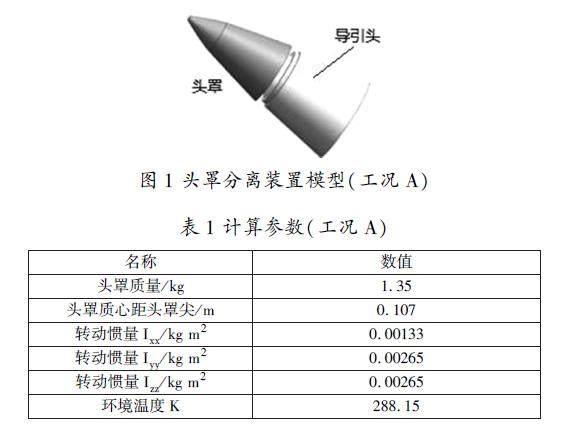
工況A計算模型為地面分離試驗下頭罩拋罩分離模型,該模型中頭罩已經(jīng)完成了彈射達(dá)到了軸向的最大行程位置,此時頭罩底端面距導(dǎo)引頭的前外露面19mm,頭罩分離裝置的具體幾何模型見1。工況A仿真計算域模擬了頭罩分離裝置被豎直放置在試驗平臺上,計算域全局坐標(biāo)系原點(diǎn)位于分離0時刻的頭罩頂點(diǎn)處,Xa正向指向空中,Ya向指向左側(cè)水平向。數(shù)值仿真計算的相關(guān)參數(shù)見表1所示。
非定常數(shù)值模擬時,根據(jù)彈軸與地面夾角設(shè)定重力加速度(-9.8,0,0),根據(jù)試驗實(shí)測風(fēng)速數(shù)據(jù)設(shè)置來流速度為3.5m/s,仿真時間為0.05s。初始時刻,頭罩軸向分離速度為Vxo=14m/s,噴口燃?xì)鈱︻^罩的推力從0時刻開始作用到50ms結(jié)束,該推力始終垂直于頭罩軸線,初始時刻噴口推力P指向Ya正方向。
3.2 工況B
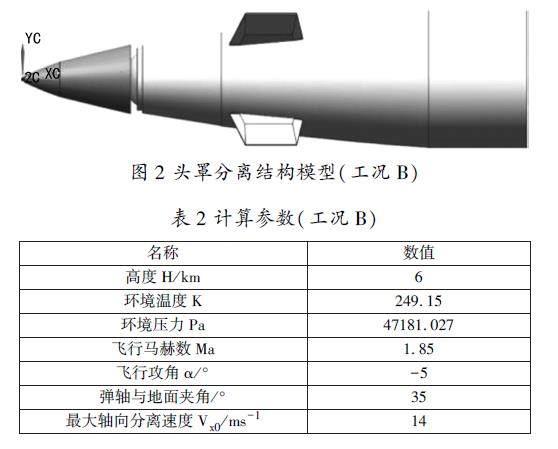
工況B計算模型為真實(shí)飛行狀態(tài)下頭罩拋罩分離模型,該模型中頭罩已經(jīng)完成了彈射達(dá)到了軸向的最大行程位置,此時頭罩底端面距導(dǎo)引頭的前外露面19mm,由于實(shí)際外形中導(dǎo)引頭艙段有舵翼,該模型考慮了舵翼附近的激波會對頭罩分離后的運(yùn)動產(chǎn)生干擾,于是截取了帶舵翼的前段艙體,頭罩分離裝置的具體幾何模型見圖2。工況B仿真計算域模擬了頭罩分離裝置在彈道末段的拋罩分離,計算域全局坐標(biāo)系原點(diǎn)位于分離0時刻的頭罩頂點(diǎn)處,Xb沿彈軸指向彈尾,Yb指向上方。數(shù)值仿真計算的相關(guān)參數(shù)見表2所示。
14
非定常數(shù)值模擬時,根據(jù)彈軸與地面夾角設(shè)定重力加速度(-5.621,-8.0277,0),來流馬赫數(shù)為1.85,仿真時間 為0.05s。設(shè)置頭罩初始時刻軸向分離速度為Vxo=14m/s。初始時刻,頭罩軸向分離速度為Vxo=14m/s,噴口燃?xì)鈱︻^罩的推力從0時刻開始作用到50ms結(jié)束,該推力始終垂直于頭罩軸線,初始時刻噴口推力P指向Yb負(fù)方向。
4 數(shù)值模擬結(jié)果分析
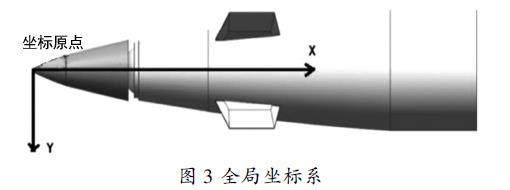
由于工況A和工況B的結(jié)構(gòu)模型和計算域不同,所設(shè)定的全局坐標(biāo)系正方向未統(tǒng)一,為了方便以下對計算結(jié)果的對比分析,將結(jié)果分析時的全局坐標(biāo)系統(tǒng)一為:如圖3所示,坐標(biāo)原點(diǎn)為初始時刻頭罩頂點(diǎn)處,X向沿母彈彈軸指向彈尾,Y向指向正下方,其燃?xì)馔屏?時刻施加方向是沿Y正向的。
4.1 地面分離試驗與工況A仿真對比
圖4給出了工況A仿真計算與地面分離試驗高速攝像照片對比情況。可以看到頭罩在50ms以內(nèi)XY平面的姿態(tài)角、X向位移和Y向位移都基本一致。由于頭罩分離裝置是靜止放置在試驗臺上的,頭罩分離主要依靠噴口側(cè)推力使其完成側(cè)拋。通過仿真計算和試驗結(jié)果對比來看,本文中數(shù)值計算模擬所得結(jié)果在計算域內(nèi)是可靠的。
4.2 頭罩拋罩分離壓力場對比
圖5為非定常狀態(tài)下頭罩拋罩分離的壓力云圖,仿真時間為50ms。圖中所示平面為頭罩分離裝置分離的計算域XY截面,為頭罩分離運(yùn)動的主平面。工況A的流場為小于0.1Ma的不可壓縮流,而工況B為超音速流場,從壓力云圖對比可以清楚的看到流場狀態(tài)對頭罩運(yùn)動的影響差別很大:工況B中迎風(fēng)面形成的激波對頭罩具有明顯的氣動干擾作用,隨著頭罩遠(yuǎn)離其干擾作用主要集中在導(dǎo)引頭前端外露面。通過對比頭罩軸向運(yùn)動軌跡可以看到,工況A頭罩在初始分離速度的作用下沿軸向一直在遠(yuǎn)離導(dǎo)引頭,而工況B由于頭罩受到空氣阻力的作用使其先遠(yuǎn)離,在大約30ms之后開始靠近彈體。對比頭罩沿徑向運(yùn)動軌跡可以看到,工況A和工況B在噴口側(cè)推力的作用下都在遠(yuǎn)離導(dǎo)引頭,但是由于工況B還受到升力的作用使其沿徑向相較于工況A更加遠(yuǎn)離導(dǎo)引頭。
4.3 動力學(xué)特性對比
圖6為頭罩質(zhì)心位移隨時間變化曲線,圖7和圖8分別為分離過程中頭罩質(zhì)心相對速度和質(zhì)心相對加速度隨時間變化曲線。工況A中頭罩沿X向一直在遠(yuǎn)離彈體(見圖6(a)),Vx一直在衰減(見圖7(a)),ax主要由重力加速度和燃?xì)馔屏向分力組成(其加速度如圖8(a)所示)。與工況A不同,受來流阻力作用工況B的頭罩沿X向先遠(yuǎn)離后在大約30ms時刻開始靠近彈體(見圖6(a)),Vx衰減較工況A劇烈的多(見圖7(a)),且在大約30ms時減為0,之后開始靠近彈體。通過對比可以看出,相較于地面分離試驗,真實(shí)飛行狀態(tài)下來流阻力阻礙了頭罩與導(dǎo)引頭的軸向分離。在頭罩分離設(shè)計中需要重點(diǎn)關(guān)注來流阻力對頭罩軸向分離運(yùn)動的影響以防頭罩與導(dǎo)引頭發(fā)生碰撞。
對比頭罩質(zhì)心Y向運(yùn)動情況可知,工況A和工況B的變化趨勢基本一致,沿Y向一直在遠(yuǎn)離彈體(見圖6(b)),Vy一直在增大(如圖7(b)所示)。隨時間的變化,工況B的位移、速度和加速度都大于工況A,且位移、速度的差距逐漸增大。造成以上現(xiàn)象主要是因為:工況A沿Y向只受燃?xì)馔屏ρ豗向分量的作用,而工況B沿Y向主要受到升力和燃?xì)馔屏ρ豗向分量共同的作用。由于真實(shí)飛行狀態(tài)帶有一定的負(fù)攻角,所產(chǎn)生的升力促進(jìn)了頭罩與導(dǎo)引頭的徑向分離。
5 結(jié)論
本文運(yùn)用計算流體力學(xué)結(jié)構(gòu)嵌套網(wǎng)格技術(shù)對某頭罩分離裝置的靜態(tài)與動態(tài)分離過程進(jìn)行了數(shù)值模擬,并與地面分離試驗進(jìn)行了對比,模擬中討論了氣動力、分離力對頭罩分離運(yùn)動的影響,研究的主要內(nèi)容和結(jié)論如下:
(1)在飛行狀態(tài)下的分離初始時刻,頭罩受到的氣動阻力會阻礙頭罩與導(dǎo)引頭沿軸向的安全分離,在頭罩分離設(shè)計中需要重點(diǎn)關(guān)注以防頭罩與導(dǎo)引頭發(fā)生碰撞。
(2)帶有一定的飛行攻角,使得頭罩在分離初始時刻受到氣動升力,可推動頭罩的徑向分離運(yùn)動,有利于頭罩、導(dǎo)引頭安全分離。
(3)基于結(jié)構(gòu)動態(tài)嵌套網(wǎng)格技術(shù)模擬頭罩分離裝置間分離能夠得到清晰、直觀的分離姿態(tài)和分離軌跡,可對危險工況進(jìn)行模擬驗證,具有較高的工程應(yīng)用價值。
參考文獻(xiàn):
王海清,楊正才,劉海旭,等. 某頭罩分離裝置分離全過程仿真計算[J]. 兵工自動化,2020,39(02): 68-72.
范慶志,孫秦.飛行器頭罩分離技術(shù)及設(shè)計方案分析研究[J].機(jī)械設(shè)計與制造,2008(9):8-10.
張科,陳之光,趙玉印.國外高速導(dǎo)彈的頭罩防護(hù)技術(shù)[J].紅外與激光工程,2013(1)154-158.
戈慶明,劉秀春,渠弘毅,等. 高速飛行器頭罩分離設(shè)計方案研究[J]. 導(dǎo)彈與航天運(yùn)載技術(shù),2017,(03): 28-31.
作者簡介:田霖(1991—? ),女,漢族,河南臨潁人,碩士研究生,研究方向:飛行器氣動外形設(shè)計及仿真計算。