高密度場(chǎng)景下基于改進(jìn)A* 算法的無(wú)人機(jī)路徑規(guī)劃
2024-09-14 00:00:00趙烈海李大鵬
無(wú)線電通信技術(shù) 2024年4期






摘 要:針對(duì)無(wú)人機(jī)在高密度障礙物的城市環(huán)境飛行中路徑規(guī)劃實(shí)時(shí)性難以滿足的問(wèn)題,在A* 算法基礎(chǔ)上結(jié)合跳點(diǎn)搜索(Jump Point Search,JPS)策略,提出一種Jump A*(JA* )算法。將A* 算法進(jìn)行三維擴(kuò)展,并提出了一種三維對(duì)角距離精確表示了實(shí)際路徑代價(jià),縮短了搜索時(shí)間。在二維JPS 策略的基礎(chǔ)上拓展得到了三維JPS 策略,代替了A* 算法中的幾何鄰居擴(kuò)展,大大減少了擴(kuò)展結(jié)點(diǎn)數(shù)。對(duì)障礙物密度0. 1 ~ 0. 4 的復(fù)雜三維柵格地圖進(jìn)行了路徑規(guī)劃仿真。仿真結(jié)果表明,JA* 算法相較于A*算法,在高密度多障礙物的近地城市環(huán)境下,路徑長(zhǎng)度幾乎不變,評(píng)估節(jié)點(diǎn)數(shù)大幅度減小,搜索速度具有顯著提升。
關(guān)鍵詞:路徑規(guī)劃;跳點(diǎn)搜索;A*算法;三維柵格地圖;高密度障礙物
中圖分類(lèi)號(hào):TN919. 23 文獻(xiàn)標(biāo)志碼:A 開(kāi)放科學(xué)(資源服務(wù))標(biāo)識(shí)碼(OSID):
文章編號(hào):1003-3114(2024)04-0713-07
0 引言
無(wú)人機(jī)作為先進(jìn)的飛行器,具有體積小、成本低等優(yōu)勢(shì),已廣泛用于執(zhí)行識(shí)別、探測(cè)和監(jiān)控等任務(wù)。然而,要在復(fù)雜環(huán)境中成功完成任務(wù),需要解決路徑規(guī)劃問(wèn)題。
根據(jù)對(duì)先驗(yàn)環(huán)境的已知程度,路徑規(guī)劃可以分為全局與局部路徑規(guī)劃[1-3]。局部路徑規(guī)劃通常采用人工勢(shì)場(chǎng)法[4]和動(dòng)態(tài)窗口法[5]等。本文主要研究了全局路徑規(guī)劃問(wèn)題,目前常用算法有A* 算法[6]、Dijkstra 算法[7]、RRT 算法[8]、蟻群算法[9]等。而根據(jù)使用方法和地圖的不同,可分為基于柵格地圖的路徑規(guī)劃算法、基于采樣的路徑規(guī)劃算法和智能仿真算法等。
在基于柵格地圖的路徑規(guī)劃算法中,A* 算法被廣泛應(yīng)用。然而,它仍存在一些缺點(diǎn),例如:由于大量操作優(yōu)先級(jí)隊(duì)列導(dǎo)致運(yùn)行速度緩慢,內(nèi)存占用大,以及在對(duì)稱路徑的環(huán)境中會(huì)耗費(fèi)更多時(shí)間。Harabor等[10]于2011 年提出了跳點(diǎn)搜索(Jump Point Search,JPS)算法,針對(duì)A*算法的冗余節(jié)點(diǎn)進(jìn)行了剪枝,減小了不必要的搜索,實(shí)現(xiàn)了節(jié)點(diǎn)間的長(zhǎng)距離跳躍,大幅度提升了運(yùn)行速度。此外,文獻(xiàn)[11]提出一種六邊形柵格JPS 策略,進(jìn)一步提升了搜索速度。
在啟發(fā)式函數(shù)方面,文獻(xiàn)[12]提出了一種等同真實(shí)距離的啟發(fā)式函數(shù),但缺少三維場(chǎng)景的擴(kuò)展。文獻(xiàn)[13]提出了一種改進(jìn)A*算法應(yīng)用于二維移動(dòng)機(jī)器人,解決了A算法存在大量冗余節(jié)點(diǎn)的問(wèn)題,但缺少對(duì)應(yīng)的三維JPS 策略。
在軌跡平滑方面,文獻(xiàn)[14]使用Theta*算法在復(fù)雜三維場(chǎng)景中實(shí)現(xiàn)了路徑規(guī)劃,獲得了更加平滑的路徑。文獻(xiàn)[15]對(duì)JPS 搜索策略進(jìn)行了優(yōu)化,同時(shí)引入了3 次B 樣條插值進(jìn)行路徑平滑,相較于Theta*算法將規(guī)劃與軌跡平滑進(jìn)行了步驟分離。
在JPS 搜索策略優(yōu)化方面,文獻(xiàn)[16]用“對(duì)角優(yōu)先”方式改進(jìn)了JPS 搜索策略,使對(duì)Openlist 的操作大大減小。文獻(xiàn)[17]采用向量叉積與尺度平衡因子相結(jié)合的方法優(yōu)化傳統(tǒng)JPS 算法的啟發(fā)函數(shù)。
在對(duì)Openlist 數(shù)據(jù)結(jié)構(gòu)優(yōu)化上,文獻(xiàn)[18]使用最小堆的數(shù)據(jù)結(jié)構(gòu)對(duì)Openlist 進(jìn)行了改進(jìn),使其取最小值的速度大幅度提升。
在實(shí)際場(chǎng)景中,文獻(xiàn)[19]將改進(jìn)A* 算法部署在了農(nóng)業(yè)無(wú)人機(jī)上,大幅提升了路徑規(guī)劃的速度。文獻(xiàn)[20]利用改進(jìn)RRT 算法實(shí)現(xiàn)了無(wú)人機(jī)電力桿塔巡檢的路徑規(guī)劃。
針對(duì)傳統(tǒng)A*算法在障礙物較多的三維場(chǎng)景中搜索效率較低的問(wèn)題,本文提出一種Jump A*(JA*)算法,對(duì)A* 算法的啟發(fā)式函數(shù)進(jìn)行了改進(jìn),使其等于實(shí)際的最佳路徑代價(jià)。在二維JPS 策略的基礎(chǔ)上拓展得到了三維JPS 策略,代替了A*算法中的幾何鄰居擴(kuò)展,大大減小了擴(kuò)展結(jié)點(diǎn)數(shù)。解決了在路徑對(duì)稱時(shí)A* 算法造成的冗余問(wèn)題,提升了算法的運(yùn)行效率,滿足了無(wú)人機(jī)路徑規(guī)劃對(duì)實(shí)時(shí)性的要求。
1 問(wèn)題描述
1. 1 環(huán)境模型建立
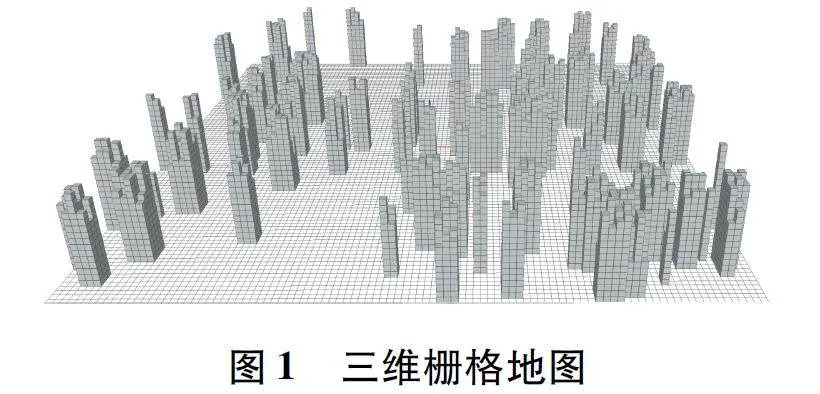
在無(wú)人機(jī)路徑規(guī)劃中,需要建立一個(gè)坐標(biāo)系統(tǒng),通過(guò)傳感器信息建立一個(gè)能表示環(huán)境的地圖模型。本文使用三維柵格地圖來(lái)構(gòu)建環(huán)境地圖模型。為構(gòu)建精確的柵格地圖,將雙目深度相機(jī)獲取的三維點(diǎn)云地圖轉(zhuǎn)換為分辨率為0. 2 的三維柵格地圖,將無(wú)人機(jī)視為一個(gè)方格,便于在占用柵格地圖中進(jìn)行計(jì)算。無(wú)人機(jī)的位置使用柵格地圖中的索引坐標(biāo)表示,空白地區(qū)為無(wú)障礙物地區(qū),柵格為空閑狀態(tài),有灰白色占用柵格的地區(qū)為障礙物地區(qū),柵格為占用狀態(tài),柵格地圖如圖1 所示。
無(wú)人機(jī)飛行過(guò)程中會(huì)存在不同的飛行方向,在不考慮障礙物以及地圖邊緣的情況下,可以向三維柵格中的26 個(gè)方向移動(dòng),如圖2 所示,不同的方向存在不一樣的路徑長(zhǎng)度。
1. 2 A*算法及存在的問(wèn)題
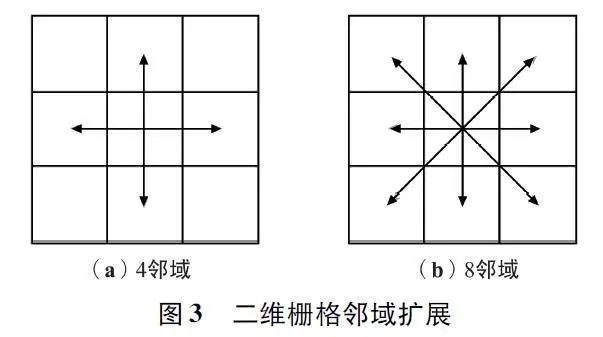
A*算法是一種啟發(fā)式的搜索算法,在Dijkstra算法的基礎(chǔ)上融合了貪心算法的思想,不同于Dijkstra 算法的隨機(jī)各方向擴(kuò)張,A* 算法通過(guò)啟發(fā)式的搜索策略,可以更快地得到最優(yōu)路徑。在二維柵格中其搜索方向?yàn)椋?鄰域或8 鄰域,如圖3 所示。
三維柵格地圖中其擴(kuò)展方向?yàn)椋玻?鄰域或6 鄰域,代價(jià)函數(shù)表達(dá)式為:
f(n)= g(n)+h(n), (1)
式中:f(n)為由起始節(jié)點(diǎn)到目標(biāo)節(jié)點(diǎn)的總代價(jià)函數(shù),g(n)為由起始節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)n 所產(chǎn)生的實(shí)際代價(jià)函數(shù),h(n)為當(dāng)前節(jié)點(diǎn)到目標(biāo)節(jié)點(diǎn)的預(yù)估代價(jià)函數(shù)。
式中:xs、ys、zs 為起始節(jié)點(diǎn)的坐標(biāo),xn、yn、zn 為當(dāng)前節(jié)點(diǎn)的坐標(biāo),g(n)為三維空間中起始點(diǎn)s 與當(dāng)前節(jié)點(diǎn)n 的真實(shí)距離。預(yù)估代價(jià)函數(shù)h(n)具有多種表達(dá)形式,一般有歐氏距離、曼哈頓距離:
式中:預(yù)估代價(jià)函數(shù)h(n)的取值決定了A* 算法搜索效率,當(dāng)h(n)取值為0 時(shí)將退化為Dijkstra 算法,而當(dāng)h(n)遠(yuǎn)大于實(shí)際路徑損耗時(shí)將退化為基于貪心算法思想的廣度優(yōu)先搜索。
傳統(tǒng)A*算法在整個(gè)全局路徑規(guī)劃過(guò)程中占用了大量?jī)?nèi)存,在搜索過(guò)程中,需要維護(hù)一個(gè)隊(duì)列,隊(duì)列中可能會(huì)存儲(chǔ)大量節(jié)點(diǎn)信息,如果搜索的空間較大,內(nèi)存消耗也會(huì)較高。
2 JA*算法設(shè)計(jì)
為了解決上述問(wèn)題,本文針對(duì)評(píng)估函數(shù)進(jìn)行了改進(jìn),并且融合了三維JPS 策略對(duì)A* 算法進(jìn)行改進(jìn)。
2. 1 改進(jìn)啟發(fā)式函數(shù)計(jì)算方式
恰當(dāng)?shù)膯l(fā)式函數(shù)能提高A*算法的搜索效率,傳統(tǒng)A*算法中通常使用歐氏距離與曼哈頓距離作為啟發(fā)式搜索函數(shù),但在柵格地圖中,歐氏距離會(huì)小于實(shí)際的路徑距離,會(huì)導(dǎo)致拓展的節(jié)點(diǎn)數(shù)增加。
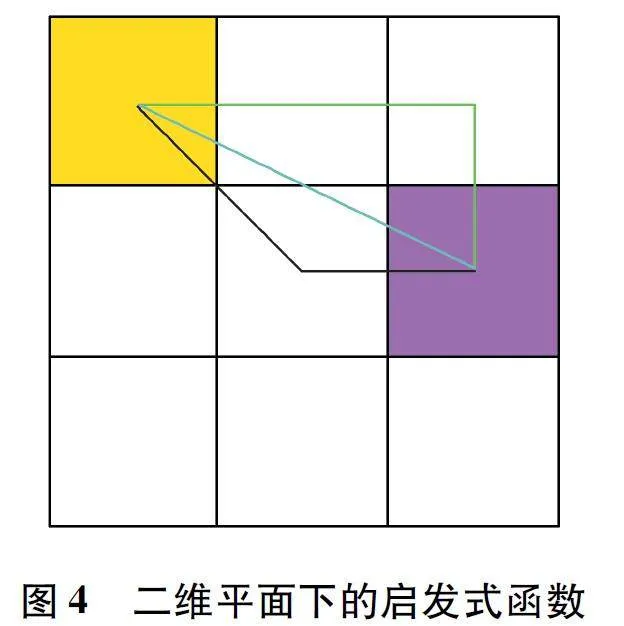
因此本文采用三維空間中的對(duì)角線距離作為啟發(fā)式搜索函數(shù),對(duì)角線距離是指網(wǎng)格地圖中用于計(jì)算兩個(gè)節(jié)點(diǎn)之間的估價(jià)函數(shù),常用于處理斜向移動(dòng)的情況。在實(shí)際最優(yōu)路徑中,沿著45°角方向擴(kuò)展必然路徑長(zhǎng)度小于90°角方向擴(kuò)展,因此二維空間下的對(duì)角線啟發(fā)函數(shù)為:
式中:xg 與yg 為目標(biāo)點(diǎn)橫縱坐標(biāo),xn 與yn 為當(dāng)前點(diǎn)的橫縱坐標(biāo)。
二維平面下的啟發(fā)式函數(shù)如圖4 所示,綠色為二維曼哈頓距離,藍(lán)色為二維歐氏距離,黑色為二維對(duì)角線距離,顯然歐氏距離小于實(shí)際最優(yōu)距離,曼哈頓距離大于實(shí)際最優(yōu)距離,而對(duì)角線距離與實(shí)際最優(yōu)距離相等,因此通過(guò)對(duì)角線距離計(jì)算得到的代價(jià)值增強(qiáng)了算法啟發(fā)性的同時(shí)也能讓算法得到最優(yōu)路徑。
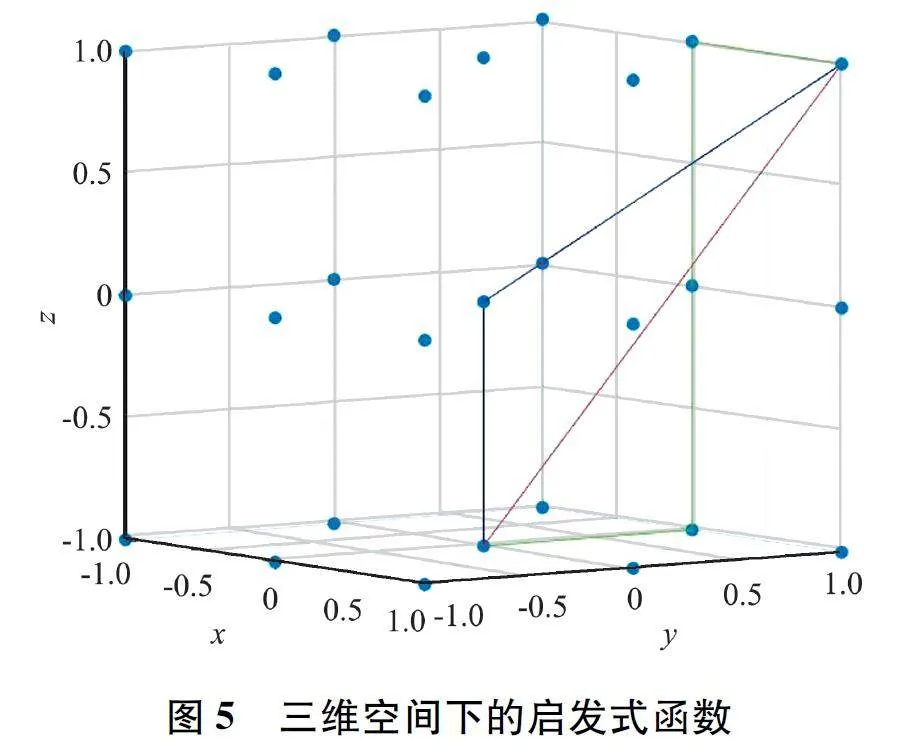
在二維對(duì)角線啟發(fā)式函數(shù)的基礎(chǔ)上,本文對(duì)其進(jìn)行拓展得到了三維對(duì)角線啟發(fā)式函數(shù),如圖5 所示,圖中分別顯示了點(diǎn)(0,0,-1)到(1,1,1)的距離。紅色為三維歐氏距離,藍(lán)色為三維對(duì)角線,綠色為距離三維曼哈頓距離,代價(jià)值依次為4、根號(hào)下6 、根號(hào)下3 +1。顯然,對(duì)角線距離更符合真實(shí)無(wú)人機(jī)運(yùn)動(dòng)的鄰域擴(kuò)展,在26 鄰域的假設(shè)下,對(duì)角線距離與真實(shí)代價(jià)相等。因此,對(duì)角線距離更接近無(wú)人機(jī)真實(shí)運(yùn)動(dòng)的路徑代價(jià)。
dx= |xg -xn |, (6)
dy= |yg -yn |, (7)
dz= |zg -zn |, (8)
式中:dz、dy、dz 為目標(biāo)點(diǎn)坐標(biāo)與當(dāng)前點(diǎn)坐標(biāo)的絕對(duì)距離,需要對(duì)dx、dy、dz 進(jìn)行大小排序,假設(shè)從大到小依次為Val1、Val2、Val3。
式中:h(n)為26 鄰域下實(shí)際的路徑代價(jià)。在傳統(tǒng)的啟發(fā)式函數(shù)中,歐氏距離小于實(shí)際的路徑代價(jià),因此能獲取更準(zhǔn)確的最優(yōu)路徑但同時(shí)耗費(fèi)的時(shí)間也會(huì)增加;而曼哈頓距離則大于實(shí)際的路徑代價(jià),因此其耗時(shí)較少但同時(shí)不一定會(huì)得到最優(yōu)路徑。相對(duì)而言對(duì)角線距離在速度和最優(yōu)性方面達(dá)到了平衡。
2. 2 三維JPS 策略設(shè)計(jì)
JPS 算法是在A* 算法的基礎(chǔ)上提出的一種減少鄰域拓展過(guò)程中產(chǎn)生大量冗余中繼節(jié)點(diǎn)的優(yōu)化策略。本文拓展了二維JPS 搜索策略,得到了三維空間下的修剪規(guī)則與跳躍規(guī)則,并與三維空間下的A*算法結(jié)合。修剪的基本準(zhǔn)則是當(dāng)拓展至當(dāng)前節(jié)點(diǎn)n 時(shí),若x 的鄰居節(jié)點(diǎn)可以從父節(jié)點(diǎn)不經(jīng)過(guò)x 到達(dá)且代價(jià)更低時(shí),則不考慮擴(kuò)展該節(jié)點(diǎn)。不同于A*算法需要將幾何意義上的所有鄰居節(jié)點(diǎn)加入OpenList 中進(jìn)行評(píng)估,JPS 算法在鄰居節(jié)點(diǎn)中進(jìn)行篩選,選取符合修剪規(guī)則的節(jié)點(diǎn)。符合修剪規(guī)則的節(jié)點(diǎn),將其稱為自然鄰居節(jié)點(diǎn),而障礙物不能被修剪的節(jié)點(diǎn)稱為強(qiáng)制鄰居節(jié)點(diǎn)。因此修剪規(guī)則根據(jù)當(dāng)前節(jié)點(diǎn)的鄰居節(jié)點(diǎn)是否存在障礙物,分兩類(lèi)情況討論。
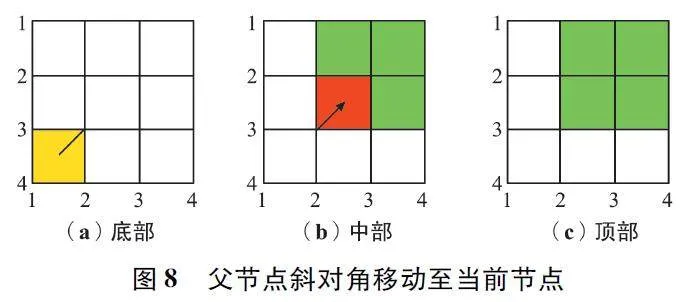
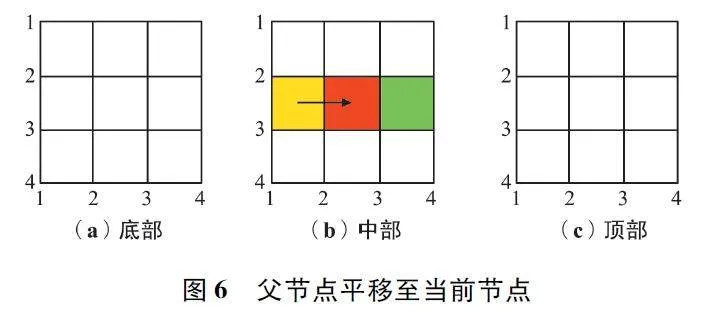
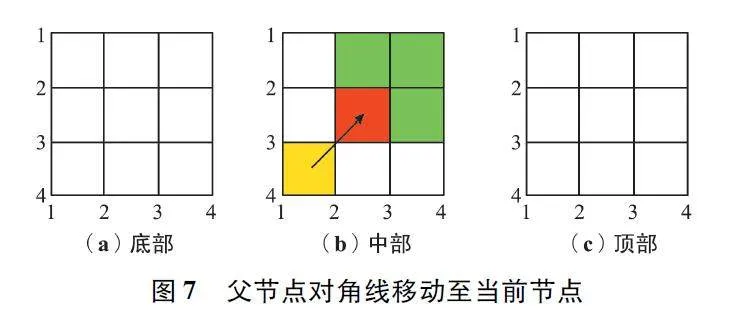
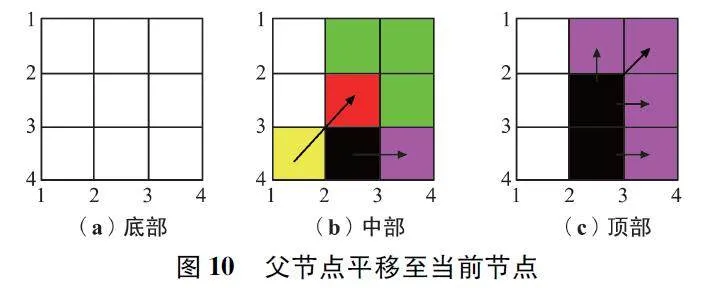
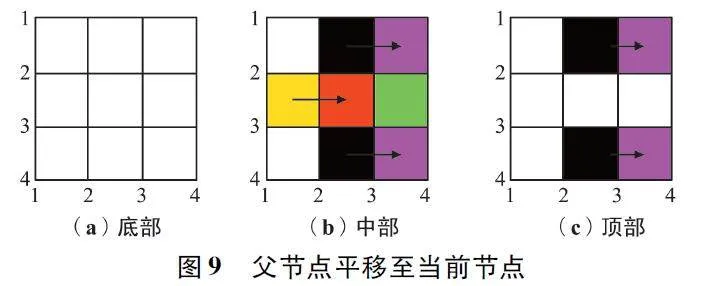
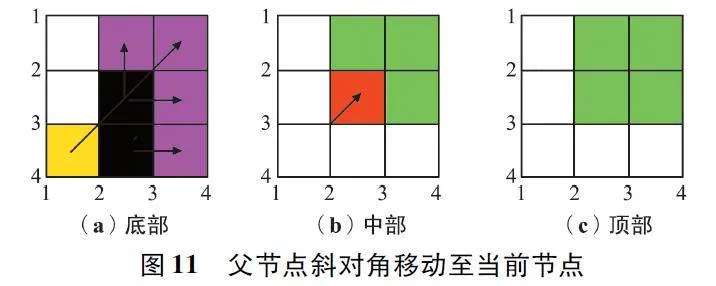
在三維場(chǎng)景下,無(wú)障礙物的26 鄰域擴(kuò)展可分為3 種情況:① 平移(代價(jià)為1);② 對(duì)角線移動(dòng)(代價(jià)為槡2 );③ 斜上對(duì)角線移動(dòng)(代價(jià)為槡3 )。將三維空間中的27 個(gè)節(jié)點(diǎn)分為3 層,每層9 個(gè)節(jié)點(diǎn)。紅色節(jié)點(diǎn)表示當(dāng)前拓展到的節(jié)點(diǎn),黃色節(jié)點(diǎn)為其父節(jié)點(diǎn),綠色節(jié)點(diǎn)為當(dāng)前節(jié)點(diǎn)下一步考慮的擴(kuò)展節(jié)點(diǎn),白色節(jié)點(diǎn)為下一步拓展中不再考慮的劣性節(jié)點(diǎn),黑色節(jié)點(diǎn)為障礙物。
2. 2. 1 情況1:鄰居節(jié)點(diǎn)無(wú)障礙物
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為平行移動(dòng)時(shí),如圖6 所示。
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為對(duì)角線移動(dòng)時(shí),如圖7 所示。
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為斜對(duì)角線移動(dòng)時(shí),如圖8 所示。
2. 2. 2 情況2:鄰居節(jié)點(diǎn)存在障礙物
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為平行移動(dòng)時(shí),考慮中間層與頂層存在障礙物,如圖9 所示。
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為對(duì)角線移動(dòng)時(shí),考慮中間層與頂層存在障礙物,底層存在障礙物時(shí)不會(huì)產(chǎn)生強(qiáng)制鄰居節(jié)點(diǎn),如圖10 所示。
當(dāng)父節(jié)點(diǎn)到當(dāng)前節(jié)點(diǎn)的移動(dòng)為斜對(duì)角線移動(dòng)時(shí),考慮底層存在障礙物,中間層與頂層存在礙物時(shí)不會(huì)產(chǎn)生強(qiáng)制鄰居節(jié)點(diǎn),如圖11 所示。
2. 3 算法流程
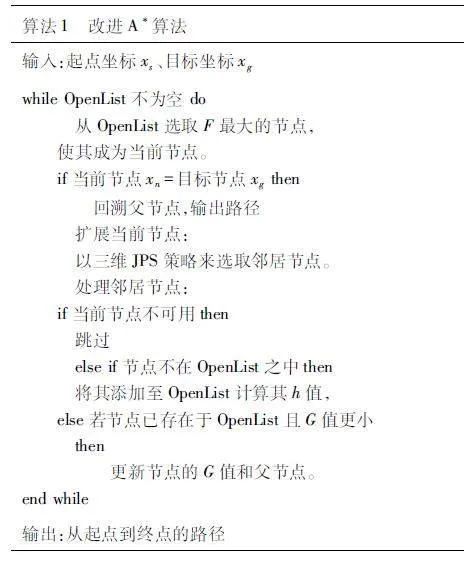
改進(jìn)A*算法流程如算法1 所示。
3 算法仿真與分?jǐn)?shù)據(jù)分析
為了驗(yàn)證JA*算法的有效性,本文在三維環(huán)境中對(duì)Dijkstra 算法、A* 算法和JA* 算法進(jìn)行了仿真分析。使用Ubuntu 18. 04 操作系統(tǒng)和ROS Melodic 作為設(shè)備軟件配置,并搭配AMD Ryzen 7 5800H 處理器。為了便于部署于真實(shí)無(wú)人機(jī)且用于可視化,本文使用了ros+rviz 作為仿真平臺(tái)。在仿真分析中,針對(duì)使用不同啟發(fā)式函數(shù)的A*算法與相同地圖大小和不同障礙物密度的環(huán)境對(duì)算法進(jìn)行了比較。
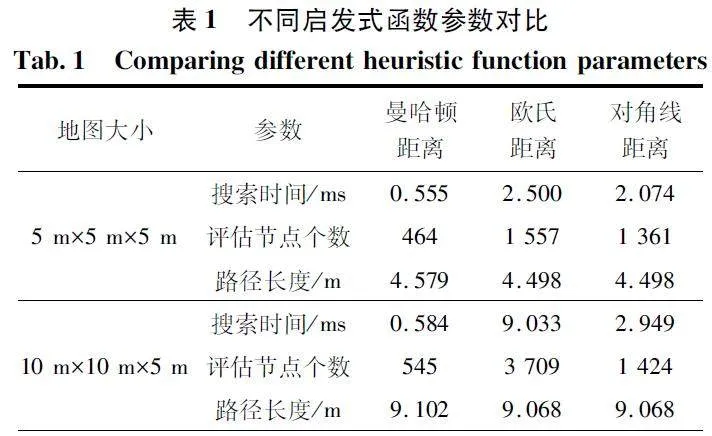
3. 1 不同啟發(fā)式函數(shù)對(duì)比
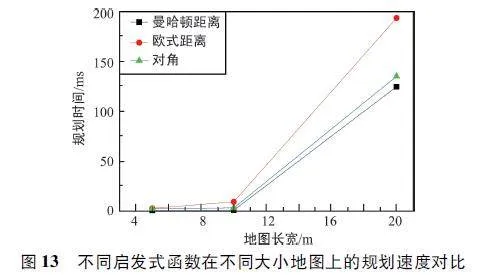
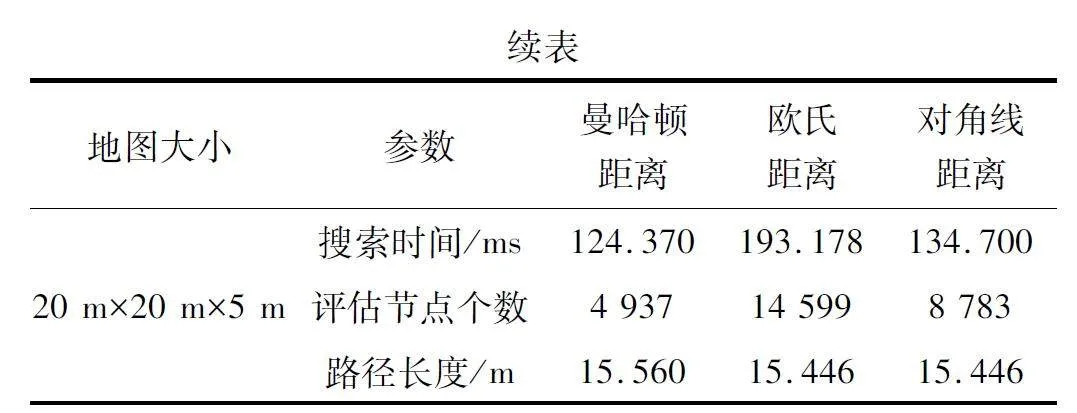
如表1 所示,在障礙物與柵格比例為0. 4 的不同大小地圖中進(jìn)行A* 算法路徑規(guī)劃時(shí),對(duì)角線距離、歐式距離與曼哈頓距離的對(duì)比。
以曼哈頓函數(shù)作為啟發(fā)式函數(shù)時(shí),其計(jì)算接近于貪心算法,因此其評(píng)估節(jié)點(diǎn)數(shù)最少,搜索效率最高,但同時(shí)有概率獲取到非最優(yōu)路徑。歐式距離由于其計(jì)算復(fù)雜,導(dǎo)致效率較低。而對(duì)角線距離在具備遠(yuǎn)高于曼哈頓距離的搜索速度的同時(shí),也能兼顧最優(yōu)的搜索路徑長(zhǎng)度。
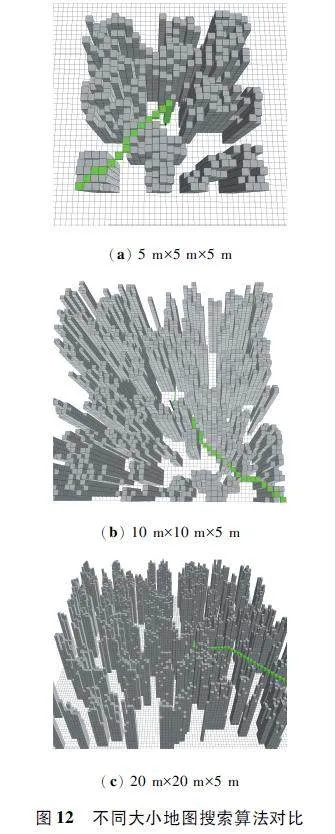
圖12 和圖13 對(duì)比了3 種啟發(fā)式函數(shù)下的算法在不同大小地圖上的規(guī)劃速度,可以看出,在規(guī)劃時(shí)間上對(duì)角線距離與曼哈頓距離接近,均遠(yuǎn)快于歐氏距離。
3. 2 不同算法對(duì)比實(shí)驗(yàn)
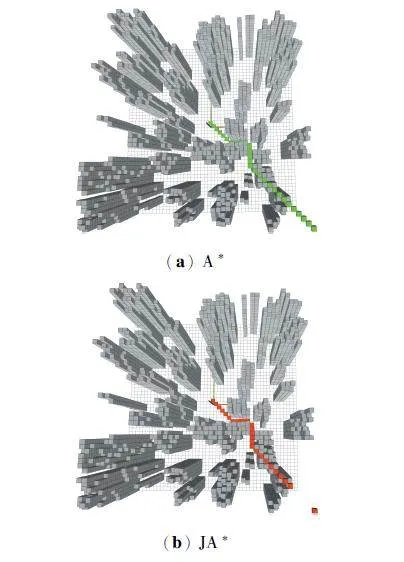
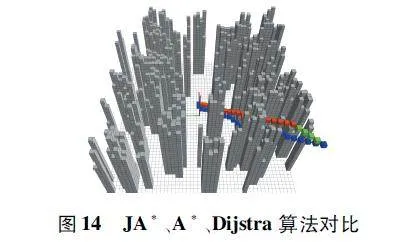
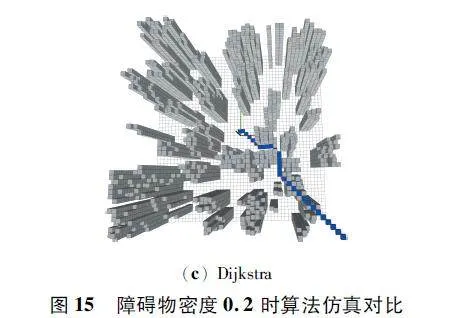
圖14 為3 種算法在不同障礙物密度的10 m×10 m×5 m 隨機(jī)柵格地圖中進(jìn)行10 次仿真實(shí)驗(yàn),設(shè)定起始點(diǎn)為坐標(biāo)(0,0,1)m,設(shè)置地圖內(nèi)四角為固定終點(diǎn)。紅色柵格為JA*算法與A*算法有部分重合,藍(lán)色柵格為Dijkstra 算法,綠色柵格為A*算法。
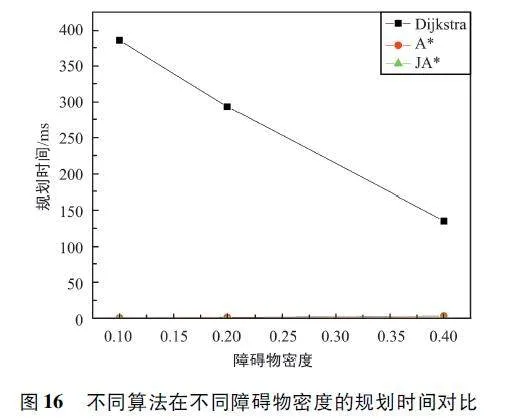
在障礙物密度為0. 2 的10 m×10 m×5 m 地圖中進(jìn)行仿真對(duì)比,如圖15 所示,規(guī)劃數(shù)據(jù)如圖16 與表2 所示。
對(duì)比A*算法、Dijkstra 算法與JA*算法,JA*算法在大多數(shù)情況下具備最快的運(yùn)行速度,同時(shí)大大減少了拓展節(jié)點(diǎn)與內(nèi)存的占用。在障礙物密度為0.2 時(shí),JA*算法搜索速度較A*算法提升了287. 60%;障礙物密度為0. 4 時(shí),搜索速度提升了578. 23% 。在評(píng)估節(jié)點(diǎn)數(shù)量的對(duì)比上,JA*算法的評(píng)估節(jié)點(diǎn)數(shù)大大減小。仿真結(jié)果表明,在障礙物密度較大的情況下評(píng)估節(jié)點(diǎn)數(shù)量與搜索速度方面,JA* 算法遠(yuǎn)優(yōu)于傳統(tǒng)A*算法。在障礙物密度較小時(shí),JA*算法搜索速度會(huì)略低于A*算法。
4 結(jié)束語(yǔ)
本文針對(duì)在密集障礙物環(huán)境無(wú)人機(jī)進(jìn)行路徑規(guī)劃中A* 算法速度慢、冗余節(jié)點(diǎn)多的問(wèn)題,提出了一種JA*搜索算法,對(duì)A*算法的啟發(fā)式函數(shù)進(jìn)行了改進(jìn),融合了JPS 算法的思想并進(jìn)行了三維拓展。通過(guò)對(duì)不同大小以及不同障礙物密度的地圖進(jìn)行了仿真分析與對(duì)比,證明了JA* 算法的有效性。仿真結(jié)果表明,在障礙物密度較大時(shí),JA* 算法較于A算法在不影響最優(yōu)路徑的情況下能大幅度提升搜索速度,大大減少了對(duì)隊(duì)列的操作次數(shù)。
本文算法也尚且存在不足之處,例如雖然JA*算法在復(fù)雜場(chǎng)景的搜索速度上具有巨大提升,但路徑不夠平滑。可以通過(guò)進(jìn)一步引入平滑函數(shù)來(lái)減小無(wú)人機(jī)加減速時(shí)的耗能。
參考文獻(xiàn)
[1] 霍鳳財(cái),遲金,黃梓健,等. 移動(dòng)機(jī)器人路徑規(guī)劃算法綜述[J]. 吉林大學(xué)學(xué)報(bào)(信息科學(xué)版),2018,36(6):639-647.
[2] 朱磊,樊繼壯,趙杰,等. 基于柵格法的礦難搜索機(jī)器人全局路徑規(guī)劃與局部避障[J]. 中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,42(11):3421-3428.
[3] 王春穎,劉平,秦洪政. 移動(dòng)機(jī)器人的智能路徑規(guī)劃算法綜述[J]. 傳感器與微系統(tǒng),2018,37(8):5-8.
[4] 張建英,趙志萍,劉暾. 基于人工勢(shì)場(chǎng)法的機(jī)器人路徑規(guī)劃[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào),2006,38 (8 ):1306-1309.
[5] FOX D,BURGARD W,THRUN S. The Dynamic Window Approach to Collision Avoidance [J]. IEEE Robotics &Automation Magazine,1997,4(1):23-33.
[6] EVERSON L R,SAPATNEKAR S S,KIM C H. A Timebased Intramemory Computing Graph Processor Featuring A Wavefront Expansion and 2D Gradient Control[J].IEEE Journal of Solidstate Circuits,2021,56 (7 ):2281-2290.
[7] PRIM R C. Shortest Connection Networks and Some Generalizations[J]. The Bell System Technical Journal,1957,36(6):1389-1401.
[8] DA SILVA C L,TONIDANDEL F. DVG+ A and RRT Pathplanners:A Comparison in a Highly Dynamic Environment[J]. Journal of Intelligent & Robotic Systems,2021,101:58.
[9] DORIGO M,GAMBARDELLA L M. Ant Colony System:A Cooperative Learning Approach to the Traveling Salesman Problem[J]. IEEE Transactions on Evolutionary Computation,1997,1(1):53-66.
[10]HARABOR D,GRASTIEN A. Online Graph Pruning for Pathfinding on Grid Maps[EB/ OL]. [2024-02-20]. https:∥cdn. aaai. org/ ojs/7994 /7994-13 -11522 -1 -2 -20201228. pdf.
[11]王文明,杜佳璐. 基于正六邊形柵格JPS 算法的智能體路徑規(guī)劃[J]. 系統(tǒng)工程與電子技術(shù),2021,43(12):3635-3642.
[12]張慶,劉旭,彭力,等. 融合JPS 和改進(jìn)A* 算法的移動(dòng)機(jī)器人路徑規(guī)劃[J]. 計(jì)算機(jī)科學(xué)與探索,2021,15(11):2233-2240.
[13]趙曉,王錚,黃程侃,等. 基于改進(jìn)A* 算法的移動(dòng)機(jī)器人路徑規(guī)劃[J]. 機(jī)器人,2018,40(6):903-910.
[14]林思偉,席萬(wàn)強(qiáng),李青云,等. 復(fù)雜環(huán)境下的無(wú)人機(jī)三維路徑規(guī)劃[J]. 電光與控制,2023,30(2):31-35.
[15]趙衛(wèi)東,唐顧杰,宋江一. 基于改進(jìn)JPS 與三次B 樣條插值的路徑規(guī)劃算法[J]. 安徽工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2022,39(2):189-195.
[16]宋曉茹,任怡悅. 面向移動(dòng)機(jī)器人快速全局路徑規(guī)劃的改進(jìn)跳點(diǎn)搜索算法[J]. 科學(xué)技術(shù)與工程,2020,20(29):11992-11999.
[17]胡士強(qiáng),武美萍,施健,等. 融合向量叉積與跳點(diǎn)搜索策略的改進(jìn)A 算法研究[J/ OL]. 機(jī)械科學(xué)與技術(shù),2023:1-10(2023-01-06)[2024-03-02]. https:∥doi.org/10. 13433 / j. cnki. 1003-8728. 20230017.
[18]謝春麗,高勝寒,孫學(xué)志. 融合改進(jìn)A* 算法和貝塞爾曲線優(yōu)化的路徑規(guī)劃算法[J]. 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2022,36(7):177-187.
[19]田茹,曹茂永,馬鳳英,等. 基于改進(jìn)A*算法的農(nóng)用無(wú)人機(jī)路徑規(guī)劃[J]. 現(xiàn)代電子技術(shù),2022,45(4):182-186.
[20]羅隆福,李冬,鐘杭. 基于改進(jìn)RRT 的無(wú)人機(jī)電力桿塔巡檢路徑規(guī)劃[J]. 湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2018,45(10):80-86.
作者簡(jiǎn)介:
趙烈海 男,(1999—),碩士研究生。主要研究方向:無(wú)人機(jī)避障與路徑規(guī)劃。
(*通信作者)李大鵬 男,(1982—),博士,教授,博士生導(dǎo)師。主要研究方向:無(wú)人機(jī)群體智能、分布式網(wǎng)絡(luò)技術(shù)、無(wú)人機(jī)集群控制。
