基于Chirp波形的物聯信號在低軌衛星信道上的適應性分析
2024-09-14 00:00:00王楚鳴洪濤鐘志偉丁曉進張更新
無線電通信技術 2024年4期









摘 要:以遠距離無線電(Long Range Radio,LoRa)體制為代表的啁啾(Chirp)波形在低功耗廣覆蓋的物聯網(Internet of Things,IoT)技術中具有廣泛的應用。針對低地球軌道(Low Earth Orbit,LEO)衛星IoT(Satellite-based IoT,SIoT)場景下,Chirp 波形在LEO 高動態信道上的適應性問題,在傳統LoRa 體制的基礎上提出了一種參數可配置和可擴展的物聯波形設計方法,基于ZYNQ+AD9361 的軟件無線電(Software Defined Radio,SDR)平臺,終端側實現了帶寬(Band Width,BW)、擴頻因子(Spread Factor,SF)等參數可配置、可擴展的LoRa 信號調制功能,網關側實現了接收信號時頻同步以及快速傅里葉變換(Fast Fourier Transform,FFT)解調算法。研究分析了LoRa 調制的各項參數配置,在LEO衛星信道中的適應性;通過誤比特率(Bit Error Ratio,BER)測試驗證了LoRa 調制的通信性能,并證明了參數可配置、可擴展的LoRa 調制比傳統LoRa 調制,在LEO 衛星信道下有更好的適應性。說明以LoRa 體制為代表且基于Chirp 波形的這一類物聯信號在LEO SIoT 場景下具有應用前景。
關鍵詞:低軌衛星物聯網;低軌高動態信道;啁啾;參數配置;適應性分析
中圖分類號:TN919. 23 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3114(2024)04-0739-11
0 引言
衛星物聯網(Satellite-based Internet of Things,SIoT)是指通過衛星技術實現物聯網(Internet ofThings,IoT)設備之間的連接,利用衛星網絡提供全球范圍內的覆蓋,為IoT 設備提供穩定、廣泛的連接能力。由于地球表面超80% 的陸地和95% 以上的海洋,不適合建設地面基站提供IoT 終端接入網關,因此將SIoT 作為地面IoT 的補充和延伸,作為實現全球IoT 服務的一種途徑。由于和中高地球軌衛星相比,低地球軌道(Low Earth Orbit,LEO)衛星具有傳播時延短、傳播損耗低等優點,使地面IoT 終端更容易滿足小型化、低功耗和低成本等要求,所以LEO 衛星是實現SIoT 系統的最佳選擇[1-2]。
在地面IoT 中,應用比較廣泛的通信協議有遠距離無線電(Long Range Radio,LoRa)和窄帶物聯網(Narrow Band-Internet of Things,NB-IoT)。LoRa是Semtech 公司擁有物理層專利的通信技術[3-5],具有覆蓋范圍廣、穿透性強、抗干擾性強的特點,其物理層技術目前尚未公開。2013 年,Semtech 公司依據IEEE 802. 15. 4a 標準發布LoRa 芯片后就得到學術界極大的關注。關于LoRa 技術的研究只是對其通信能力的測試,包括對商用LoRa 芯片開展了鏈路性能和網絡容量等方面的性能測試和研究[6-7]。由于Semtech 公司未公開其物理層實現技術,國外一些研究工作利用軟件無線電(Software Defined Ra-dio,SDR)平臺復現了LoRa 物理層的算法[8-10],并研究LoRa 調制在LEO 衛星信道環境下的性能[11-12],包括動態多普勒頻偏對LoRa 調制的影響[13]。國外已有科研團隊借助Semtech 公司LoRa芯片在真實的LEO 衛星場景下測試了LoRa 的通信性能[14],研究了LoRa 芯片的不同帶寬(BandWidth,BW)和擴頻因子(Spread Factor,SF)等參數配置,在衛星不同軌道高度下的適應性。以上是學術界對于LoRa 信號的采樣、同步、吞吐量、媒體介入控制層協議等方面在LEO SIoT 場景下的適應性改造研究。在工業界,EchoStar 將部署由28 顆LEO衛星構成的S-Band 衛星星座,該28 顆衛星通過LoRa協議連接地面終端設備。中國近年來也在建設由38 顆衛星組成天啟SIoT 系統,使用了LoRa 技術。
LEO 衛星信道實質是一個高動態信道,由于不同SF 配置的LoRa 信號具有不同的覆蓋性能,這會導致在某些SF 配置的LoRa 信號,在一定的衛星俯仰角范圍內,信號中的多普勒頻偏值出現動態變化,當多普勒頻偏的動態變化量超過LoRa 信號的判決門限,會導致通信性能急劇惡化。為了適應LEO 高動態信道,有研究提出了一種將不同調制信息映射為不同調頻率的折疊調頻斜率鍵控調制(FCrSK)方式[15],其對抗動態多普勒頻偏的能力優于LoRa 調制,但是抗噪聲性能與頻譜效率有所下降。此外還有研究從波形設計的角度提出了對稱啁啾(Chirp)信號,對稱Chirp 信號具有較好的互相關性,更容易被捕獲[16-17]。為了解決在大頻偏情況下,對稱Chirp 信號互相關性較差以及在LEO SIoT 場景下海量終端連接的問題,在對稱Chirp 信號的基礎上進一步提出了非對稱Chirp 信號,在多址干擾情況下具有更好的捕獲性能[18]。本文研究了基于Chirp 波形的LoRa 調制信號在不同參數(BW、SF 以及中心頻率)配置下,在LEO 高動態信道中的傳輸性能,首先在終端和網關側分別基于SDR 平臺實現了一種物理層波形BW、SF 和幀長等參數可擴展配置的LoRa 調制信號,以及LoRa 調制信號時頻同步算法和信號解調方案[19]。在此基礎上利用衛星信道模擬器測試了不同參數配置的LoRa 信號在不同仰角下的通信性能,為LoRa 調制在LEO 衛星場景下的應用奠定基礎。
1 系統模型與分析
1. 1 LEO SIoT 場景及信道模型
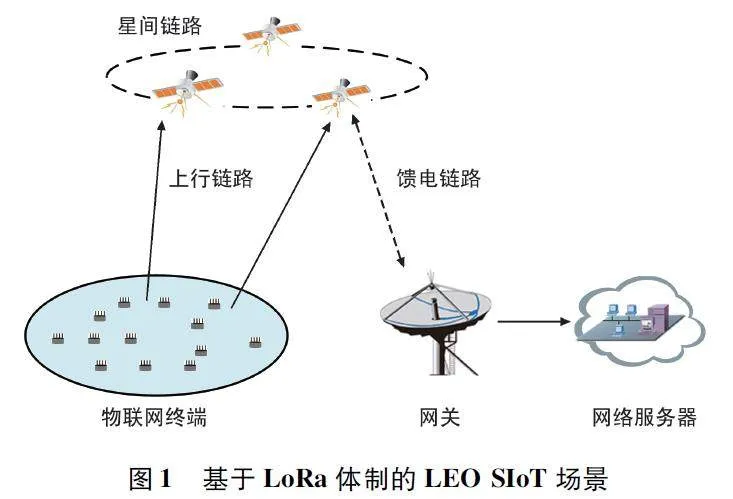
基于LoRa 體制的LEO SIoT,包括IoT 終端、LEO 衛星星座、網關和網絡服務器。IoT 終端通過上行鏈路傳輸采集的物聯信息,星上接收機解調接收到的數據包,并且通過星間鏈路間采集信息傳輸到信關站可見的LEO 衛星,最后LEO 衛星通過饋電鏈路,將數據包傳輸給信關站到核心網提供物聯服務。基于LoRa 體制的LEO SIoT 場景圖如圖1 所示。
地面IoT 終端到衛星的大尺度衰落模型為典型的自由空間損耗模型,表達式為:
g(l)= (λc / (4πl)) η , (1)
式中:l 為IoT 終端和LEO 衛星之間的距離,η 為自由空間路徑損耗系數,λc 為LoRa 載波信號的波長。
本文采用基于陰影萊斯分布的簡化陸地移動衛星信道模型[13],其小尺度衰落系數包絡的概率密度函數(Probability Density Function)表達式為:
式中:Ω 為直射路徑的平均功率,2b 為散射路徑的平均功率,m 為衰落嚴重性參數,F1()為合流超幾何函數。
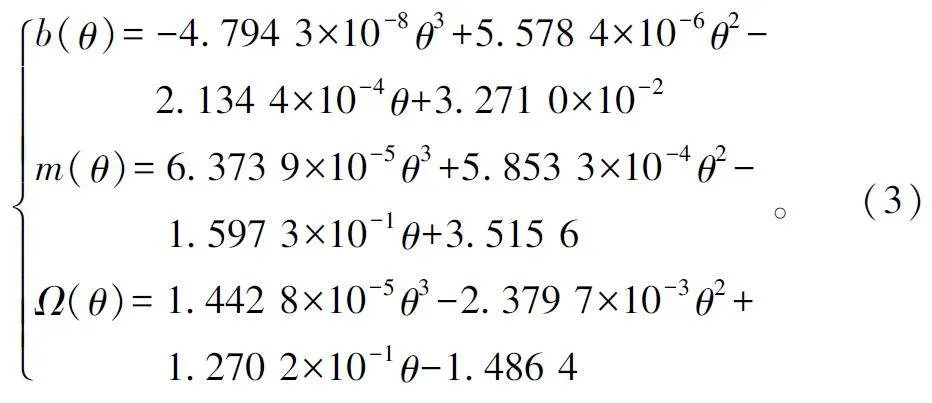
在LEO SIoT 場景下,不同仰角下信號從終端到衛星經歷的小尺度衰落不同,所以仰角在該場景下也視為影響通信性能的一個重要因素。針對基于陰影萊斯分布的簡化陸地移動衛星信道模型,其小尺度衰落系數的參數b、m 和Ω 與仰角θ 可參考如下的經驗式[20]:
LEO 衛星接收信號功率表達式為:
Pr =Pt Gr g(l)|h|2, (4)
式中:Pt 為地面IoT 終端的信號發射功率,Gr 為LEO 衛星天線的接收增益,| h |2 為陰影萊斯衰落的信道功率增益。LEO 衛星天線的接收增益Gr 表達式為:
Gr =ξ(πD/ λc) 2 p J1(μ)/2μ+36J3(μ)/ μ3 y 2, (5)
式中:ξ 為LEO 衛星天線效率,D 為LEO 衛星天線等效口徑,λc 為載波波長,J1 和J3 為第一類一階和三階貝塞爾函數,μ = 2. 071 23sin(θ)/ sin(θ3 dB )(θ為信號到達仰角,θ3 dB 為LEO 衛星接收天線波束的3 dB 帶寬)。
LEO 衛星接收信號信噪比(Signal to NoiseRatio,SNR)表達式為:
SNR=Pr / N, (6)
式中:N=kTBW 表示LEO 衛星系統中噪聲平均功率(k為玻爾茲曼常數,T 為LEO 衛星等效噪聲溫度,BW 為LEO SIoT 上行鏈路中LoRa 信號的傳輸帶寬)。
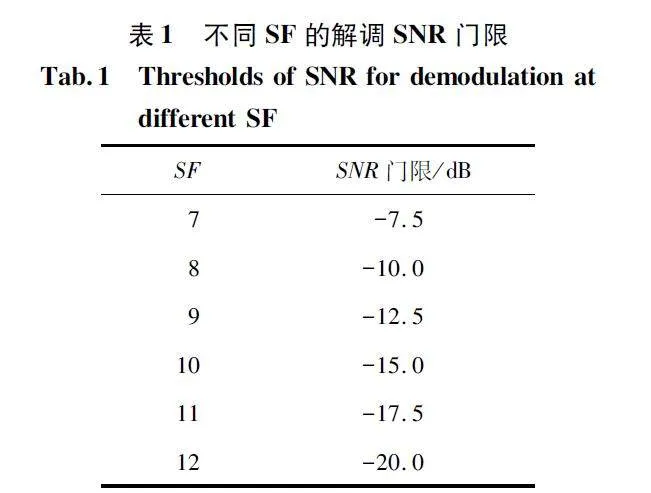
按照LoRa 標準化文件規定,SF 的取值為{7,8,9,10,11,12},不同SF 的解調SNR 門限如表1 所示。
本文將統一使用接收機輸入信號的SNR 和在該SNR 下解調信號的誤比特率(Bit Error Ratio,BER),來分析LEO SIoT 場景下LoRa 信號的傳輸性能。由于LEO 衛星運行在各個位置時仰角是不同的,對應的SNR 也不同,因此需要分析LEO 衛星在不同仰角下LoRa 信號的通信性能。
1. 2 LEO 衛星信道的動態多普勒頻偏
和地面IoT 幾乎零時延和富散射傳播的通信場景不同,LEO 衛星信道具有高時延、高動態和欠散射傳播的特性。由于LEO 衛星的軌道高度較低,運動速度較快,不僅會產生較大的多普勒頻偏,而且在某些仰角下多普勒頻譜的變化速度也相對較快,將對LoRa 信號的解調和同步造成影響:一是多普勒頻偏會導致接收到的LoRa 信號起始頻率出現偏移,從而影響正確解調;二是動態的多普勒頻偏會導致一個數據包內,后面一段信號的實際頻偏和時頻同步估算得到的頻偏差距過大,導致該段信號解調結果出現偏移。因此LEO 衛星信道下的多普勒效應會導致接收機的解調性能下降以及BER 上升。
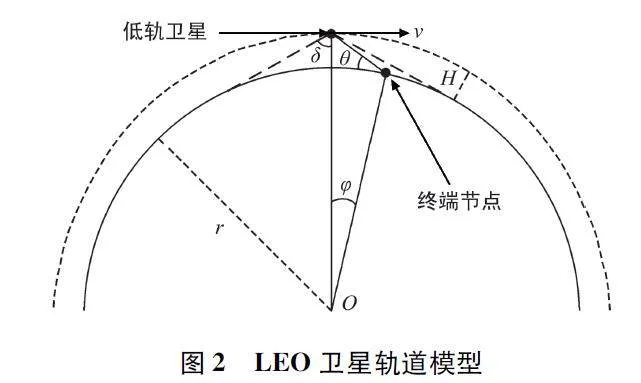
LEO 衛星的軌道模型,如圖2 所示。
圖2 中箭頭所指的兩個點分別為LEO 衛星和地面終端節點,r 為地球半徑,H 為LEO 衛星軌道高度,δ 為衛星天線張角,θ 為仰角,φ 為LEO 衛星和終端節點之間的夾角,O 為地心,v 為衛星運動速度。
設IoT 終端發送的信號載波頻率為fc,信號傳輸時間為t,則信號從地面終端節點發送到LEO 衛星后產生的多普勒頻偏可表示為:
式中:G 為引力常量,M 為地球質量,GM =3. 986 005×1014 m3 / s2 為地心引力常量。
對fd(t)求導后可得多普勒頻偏一階變化率:
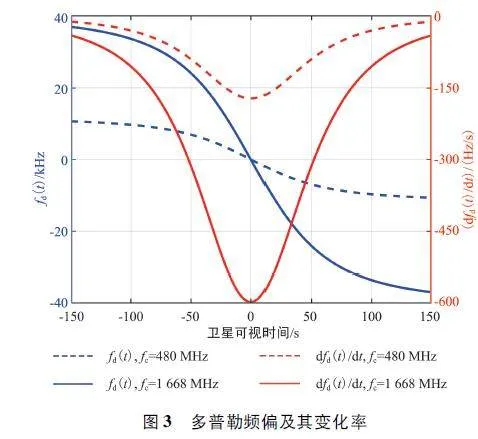
設定衛星軌道高度h = 500 km,地球半徑r =6 371 km,天線張角δ = 60°,載波頻率分別設定為fc =480 MHz 和fc =1 668 MHz 時LEO 衛星場景下的多普勒頻偏(fd(t))及多普勒變化率(dfd(t)/ dt)的曲線如圖3 所示,其中虛線和實線分別表示fc =480 MHz 和fc = 1 668 MHz 下的fd(t)和dfd(t)/ dt。從圖中可以看出,當衛星運行在不同時刻所對應的fd(t)和dfd(t)/ dt 不同,且在低仰角處,fd(t)值較大,而dfd(t)/ dt 較小,在高仰角處則相反。
1. 3 LoRa 信號的多普勒適應性分析
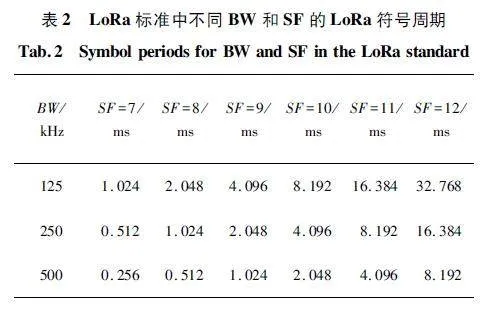
LoRa 標準化文件中規定的不同SF 和BW 的單個LoRa 符號周期,如表2 所示。
在LEO 衛星信道中,多普勒頻偏變化率最高可達到-3. 5×10-7 Hz/ s,按照LoRa 標準化文件規定,一幀數據包中最多可包含的載荷符號數量為200,則在不同SF 和BW 的參數配置下,地面終端發送200 載荷符號傳輸到LEO 衛星時,一幀LoRa 數據包內產生的最大多普勒頻偏變化量|fdmax| 是不同的。由于一幀數據包總包長加上前導碼部分最長可達212. 25 個符號,若要求在此LEO 衛星信道下實現正確傳輸數據,則在幀末尾處必須滿足| fdmax | <BW/2(SF+1),故BW/2(SF+1)就是在動態多普勒頻移環境下LoRa 接收信號的頻率判決門限。根據該門限值可以判斷出LoRa 標準中具體哪些SF 和BW 配置下,可以在LEO 衛星信道中適應動態多普勒頻偏。當載荷符號數量一定時,不同SF 和BW 配置會產生不同總包長的數據包,而不同總包長也對應不同的BW/2(SF+1)和|fdmax |。當載荷長度固定為200 個符號時,載波頻率分別為fc = 480 MHz 和fc = 1 668 MHz,BW/2(SF+1)和|fdmax |隨LoRa 數據包總包長變化的曲線如圖4 所示。從圖中可以看出,在fc =480 MHz 的載波頻率下,當數據包總包長大于434. 688 ms 時,就會出現|fdmax |>BW/2(SF+1);而在fc =1 668 MHz 的載波頻率下,當數據包總包長大于217. 344 ms 時,會出現|fdmax | >BW/2(SF+1)。若| fdmax | >BW/2(SF+1),則一幀LoRa 數據包的最大多普勒頻偏將超過門限值。
由圖4 可知,在LoRa 標準中,當fc = 480 MHz/fc =1 668 MHz 時,只有使得LoRa 數據包總包長小于869. 376 ms/434. 688 ms 的SF 和BW 配置,才能適應LEO 衛星信道環境。
2 LoRa 物理層的FPGA 設計與實現
本文設計了一種基于Chirp 波形且參數可配置和擴展的LoRa 調制,其物理層系統是基于ZYNQ+AD9361 的SDR 平臺,通過擴展傳統LoRa 調制的參數集,實現發射信號的參數可配置。使用Xilinx 公司型號為XC7Z030 的SoC 芯片,在PS 端通過ARM處理器配置AD9361 的寄存器參數;在PL 端通過Verilog HDL 和VHDL 語言設計了LoRa 調制信號的發射機和接收機。
2. 1 發射機物理層設計與實現
啁啾擴頻(Chirp Spread Spectrum,CSS)是一種基于頻率掃描的擴頻調制技術,信號的頻率會隨著時間線性地變化,形成了Chirp 信號,頻率變化可以是向上或向下的線性斜坡,不同調制信息對應于Chirp 信號不同的初始頻率。
標準Chirp 信號的表達式為:
s(t)= ej(2πfct+πμt2),0≤t≤Ts (9)
式中:fc 為載波頻率,Ts 為Chirp 信號周期,μ =BW/ Ts 為調頻率。
根據頻率隨時間的線性遞增(μ>0)或線性遞減(μ < 0),分為標準UpChirp 信號sup (t)和標準DownChirp 信號sdown(t)。
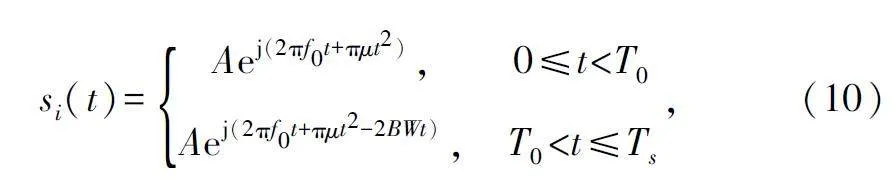
LoRa 調制則是將傳輸信息每SF 位比特組成十進制調制信息Ki∈{1,2,…,2SF -1},將調制信息映射為LoRa 信號的初始頻率f0 =KiBW/2SF,且SF∈{7,8,9,10,11,12}、BW∈{125 kHz,250 kHz,500 kHz},傳統LoRa 調制信號的表達式為:
式中:T0 = (2SF -Ki )/ BW 為已調信號的頻率跳變時刻。
本文介紹的LoRa 調制,是在基于Chirp 波形的傳統LoRa 調制基礎上,擴展了SF 和BW 的參數配置范圍。SF 增加了6,BW 增加了1 MHz。FPGA 中設計的LoRa 信號調制器結構如圖5 所示,調制器輸入參數有BW、SF、每幀發送的載荷符號數sym_num和調制數據data_in,從而實現對初始頻率和累加頻率對應的“控制字fw0”和“控制字dfw”的控制。頻率控制字累加器首先將fw0 的值賦給fw,再對fw 在每個時鐘周期都累加dfw 并將其輸出,當fw 累加到BW 對應的頻率控制字fwBW 時,直接令fw 置零。輸出的fw 進入直接數字頻率合成器(Direct DigitalFrequency Synthesis,DDS),用來生成LoRa 調制信號的I 路波形和Q 路波形。
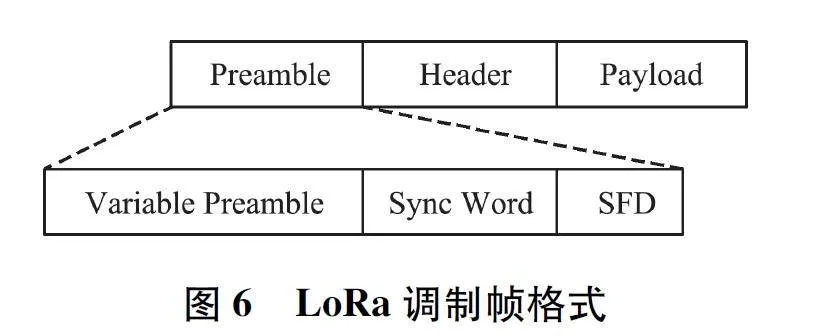
LoRa 調制數據包的幀格式,包括前導碼(Preamble)、報頭(Header)、數據載荷(Payload),前導碼由可變前導(Variable Preamble)、幀同步字(Sync Word)和幀起始分隔符(Start-of-Frame Delimiter,SFD)三部分組成,如圖6 所示。數據包主要用于接收機的時頻同步。在前導碼中,可變前導用8 個UpChirp 信號表示,幀同步字用兩個LoRa 調制信號表示,幀起始分隔符用2. 25 個標準DownChirp 信號表示。
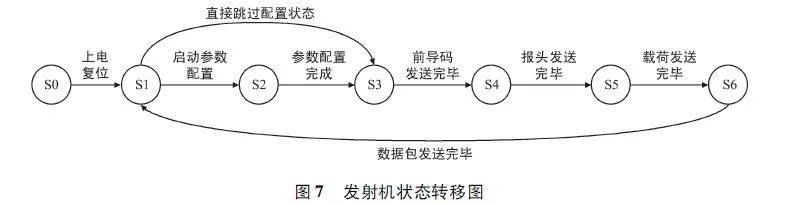
為了在FPGA 中實現LoRa 調制的數據包發送功能,在發射機中設計了一套狀態機控制程序,控制LoRa 調制的參數配置和數據包發送過程。發射機的狀態轉移圖如圖7 所示。其中S0 為上電復位狀態,S1 為空閑狀態,S2 為配置狀態,S3 為前導碼發送狀態,S4 為報頭發送狀態,S5 為載荷發送狀態,S6 為結束狀態。
2. 2 接收機物理層設計與實現
在無時延且頻率同步的理想條件下,直接通過接收信號和本地DownChirp 信號相乘,進行快速傅里葉變換(Fast Fourier Transfrom,FFT)后,通過索引FFT 輸出的峰值對應的頻率值就可以獲得正確的解調值。但是在現實場景下,發射機和接收機之間存在通信時延,且信道中存在多普勒效應,因此現實中無法做到時間和頻率都同步,上述條件將導致載波頻率偏移和符號定時偏移,載波頻率偏移分為整數倍載波頻率偏移CFOint 和小數倍載波偏移CFOfrac,符號定時偏移分為整數倍符號定時偏移STOint 和小數倍符號定時偏移STOfrac,。此外,由于發射機和接收機的晶振頻率不完全一致將導致采樣頻率偏移SFO,隨著時間的增加,SFO 產生的影響會越來越明顯,不利于接收機對長幀的解調。
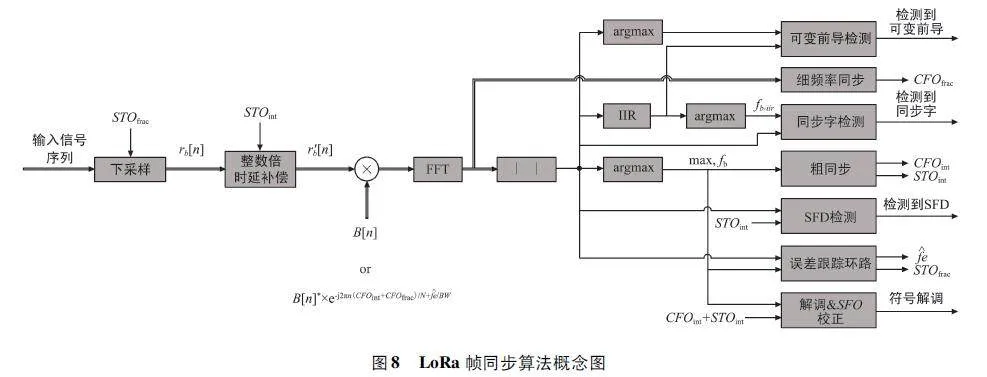
為了得到全部的CFOint、STOint、CFOfrac、STOfrac和SFO 的估計值,使用了如圖8 所示展示的LoRa幀同步算法[8]。
圖8 中輸入信號的樣本按照從左到右的順序進行處理,而算法的不同步驟對應于幀同步的不同階段,執行順序是從上到下,其中一些步驟同時發生。
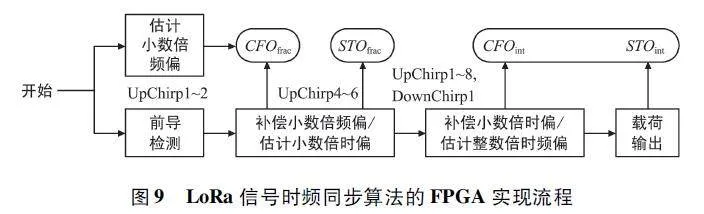
參考圖8,在FPGA 開發環境中實現了參數可擴展LoRa 信號的接收機時頻同步算法,即CFOint、STOint、CFOfrac 和STOfrac 的估計和補償,FPGA 中的算法流程如圖9 所示。
為了控制接收機的LoRa 信號解調和同步過程,還設計了狀態機程序,如圖10 所示。其中,S7為上電復位狀態,S8 為參數配置狀態,S9 為門限檢測狀態,S10 為時頻同步狀態,S11 為符號解調狀態,S12 為結束狀態。
以下將介紹在FPGA 中實現估計CFOint、STOint、CFOfrac 和STOfrac 的具體步驟。
(1)估計CFOfrac 的實現步驟
① 求得并保存前兩個UpChirp 前導碼的FFT輸出最大幅值索引的相位φi(i=1,2);
② 對這兩個相位值前后分別作差,得Δφ =φ2 -φ1;
③ 對Δφ 進行mod(2π)運算后,判斷輸出結果是否大于π,若大于則再減π,得到Δφ′;
④ 令Δφ′/2π,求得CFOfrac 的估計值。(2)估計STOf rac 的實現步驟
① 累加第4 ~ 6 個UpChirp 前導碼的FFT 幅值,得到累加頻譜Yk;
② 設Yk 的最大幅值的索引為i,則計算TEraw =(|Yi+1 | -|Yi-1 |)/ |Yi |;
③ 將TEraw 與存放在ROM 表中的19 個TE 值做比較,找到滿足TE<TEraw 的最后一個索引值j(索引的范圍為0 ~18),STOfrac 值按下式計算得到:
式中:ROM 表中的TE 值源于文獻[7]中介紹的STOfrac 估計算法,在FPGA 中量化為19 個離散值存儲于ROM 中,如圖11 所示。
(3)聯合估計CFOint 和STOint 實現步驟
① 累加1 ~ 8 個全部的UpChirp 前導碼的FFT幅值并找到最大幅值的索引sup 和第1 個DownChirp的FFT 最大幅值的索引sdown;
② 求得sup +sdown 的值,再取mod(2SF ),結果再除以2 后,幅值賦值給中間變量CFOtemp;
③ 若CFOtemp≤2SF -2,則CFOtemp 就作為整數倍頻偏的計算結果賦給CFOint;否則將CFOtemp ≤2SF -1賦給CFOint;
④ STOint 通過sdown -CFOint 再取mod(2SF)計算得出。
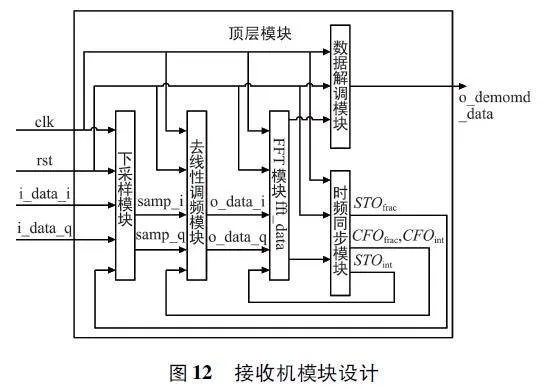
接收機的FPGA 模塊設計如圖12 所示。
① I、Q 兩路數據i_data_i 和i_data_q 進入頂層模塊后,將進入下采樣模塊進行奈奎斯特采樣;
② 采樣信號samp_i 和samp_q 進入去線性調頻模塊和本地DownChirp 信號做復數乘法,執行去線性調頻操作,輸出的兩路信號為o_data_i 和o_data_q;
③ 再輸入FFT 模塊進行FFT,得到FFT 數據fft_data;
④ 將fft_data 輸出數據解調模塊和時頻同步模塊,時頻同步模塊將分別計算出各個估計值CFOfrac、STOfrac、CFOint 和STOint;
⑤ 將以上估計值輸送給下采樣模塊、去線性調頻模塊和FFT 模塊以實現對時頻偏的補償;
⑥ 時頻偏補償完成后,數據解調模塊會根據輸入的fft_data,解調得到正確的載荷數據,并通過端口o_demod_data 輸出。
3 測試與結果分析
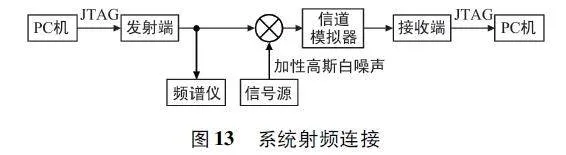
系統射頻連接如圖13 所示。
PC 機用于控制發射端發送參數可配置的LoRa信號,接收端PC 機則用于觀察解調數據,頻譜儀用于觀察發射端輸出信號的頻譜,信號源用于產生加性高斯白噪聲,信道模擬器用于產生LEO 衛星信道下的動態多普勒頻偏。在完成參數可擴展LoRa 信號物理層的FPGA 系統設計后,開展了一系列測試工作,包括LoRa 信號收發測試及LEO 衛星信道下的BER 性能測試。搭建的測試平臺主要設備包含發射端、接收端、信號源、頻譜儀和信道模擬器等,發射端和接收端是兩塊相同的ZYNQ+AD9361 開發板。測試平臺如圖14 所示。
3. 1 收發測試
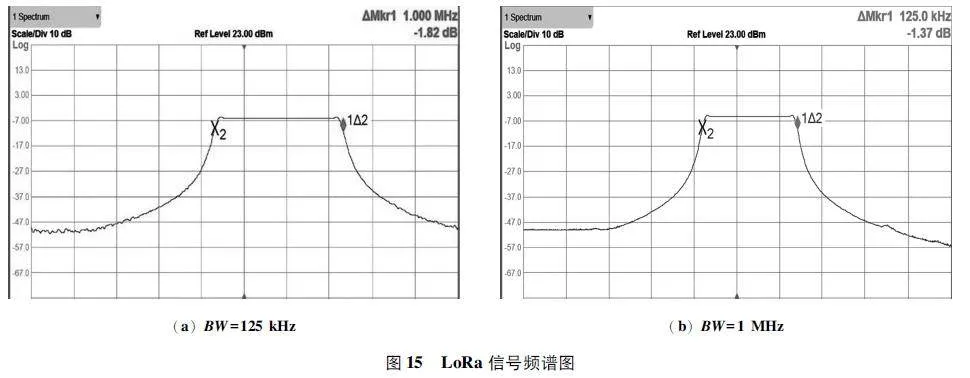
采用型號為Keysight N9010B 的頻譜分析儀,觀察發射端發送LoRa 信號的頻譜。圖15 分別展示了BW 為125 kHz 和1 MHz 時LoRa 信號的頻譜,由頻譜圖可驗證FPGA 成功產生對應BW 的LoRa 信號。
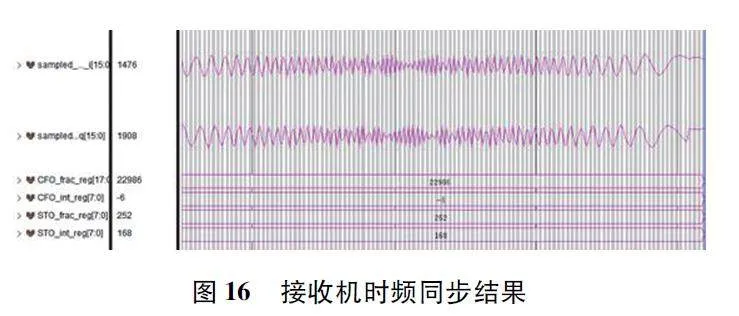
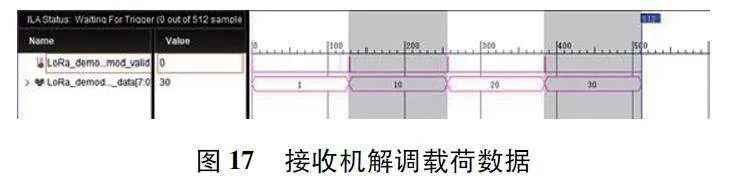
配置FPGA 中的發射機和接收機的BW 為125 kHz,SF 為8,可變前導長度為8,載荷符號數為4,載荷內容為十進制的{1,10,20,30}。在接收機的PC 端,觀察接收到的LoRa 調制信號的時頻同步結果和解調數據,測試結果如圖16 和圖17 所示。圖16 中上面兩行是一段收到的LoRa 信號,而下面4 行為CFOfrac、CFOint、STOfrac 和STOint 的估計值;圖17 為接收到的4 個載荷符號的解調數據,可以看出該接收機可以正確同步解調LoRa 信號。
3. 2 LEO 衛星信道下BER 測試
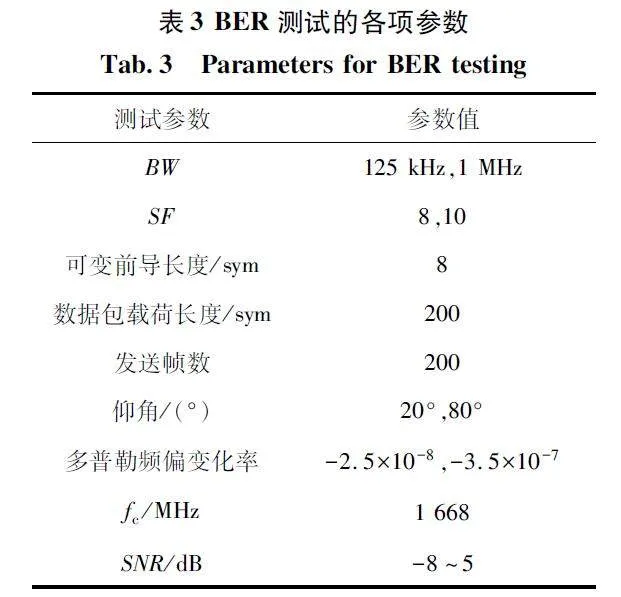
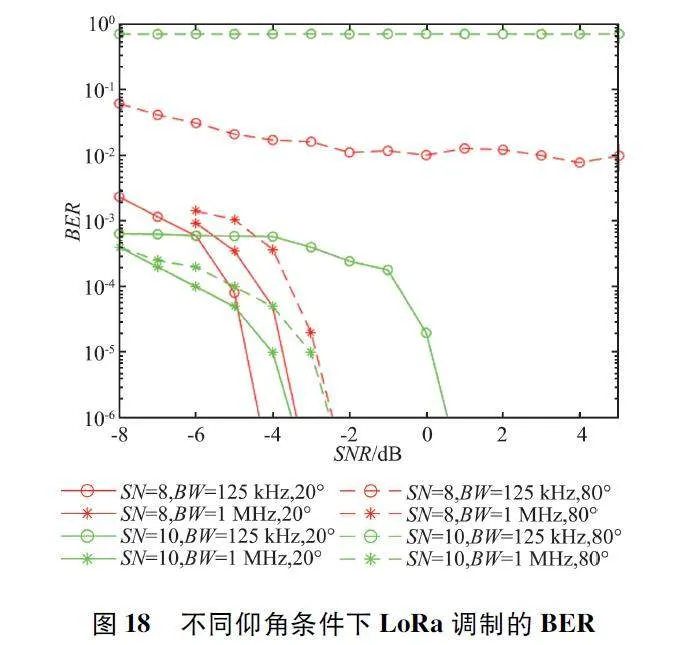
為了驗證信道衰落和多普勒頻偏對LoRa 信號傳輸的影響分析得到的結論,對SF∈{8,10},BW∈{125 kHz,1 MHz}的4 組參數配置在fc =1 668 MHz的L 頻段、20° 和80° 仰角、SNR 為-8 ~ 5 dB 的多普勒頻移條件下,開展誤碼性能測試,各項參數如表3所示。
根據測試結果,得到不同參數配置下的LoRa調制信號在仰角下的BER 曲線,如圖18 所示。其中實線和虛線分別表示20°和80°仰角下的BER。實測時由于在SF = 8,BW = 1 MHz 配置下接收機的SNR 只有-6 dB,因此只能測得-6 ~ 5 dB 的BER數據。
由圖18 可知,在低仰角條件下,所有參數配置的LoRa 調制的誤碼性能都較好,BER 和SNR 之間呈現明顯的相關性;在高仰角條件下,存在部分參數配置的LoRa 信號不能適應LEO 衛星信道環境,具體表現為其BER 在所有SNR 下都非常高,而且由于動態的多普勒引起的誤碼地板效應,BER 和SNR之間沒有表現出明顯的相關性。
3. 3 結果分析
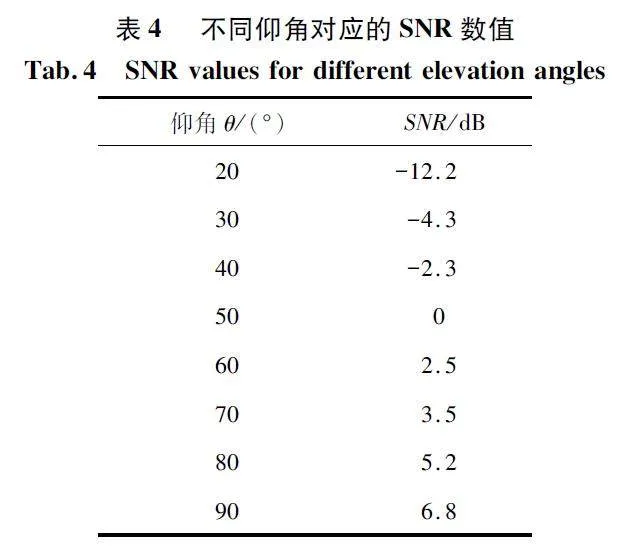
設定衛星軌道高度h = 500 km,地球半徑r =6 371 km,地面終端發射功率Pt =25 mW 時,計算不同仰角θ 下SNR 數值,如表4 所示。
由上文的測試和分析可知,當衛星和地面終端在fc = 1 668 MHz 的L 頻段下通信時,低仰角條件下,由于信道衰減較大,多普勒頻偏的變化率較小,LoRa 標準中SF 較小的那一部分配置(SF=7,8),由于SNR 過低而不能適應低仰角(20°)條件下的信道環境;在高仰角條件下,由于信道衰減較小,多普勒頻偏的變化率較大,LoRa 標準中SF 較大的那一部分配置(SF>9),由于一幀數據包較長,其最大多普勒頻偏值將超過頻率判決門限,因此不能適應高仰角(80°)條件下的信道環境。關于fc = 480 MHz,雖然在該頻段下動態多普勒頻偏的干擾較小,但是該頻段為非授權頻段,同頻干擾較為嚴重,因此選取未來SIoT 規劃的L 頻段進行BER 測試。本文提出參數可擴展的LoRa 調制在原有LoRa 標準的基礎上,將BW 配置增加至1 MHz,不僅可以在LEO 衛星信道下以更高的信息速率通信,而且其最大的優勢在于與傳統LoRa 調制相比,對LEO 衛星信道的適應能力有顯著提高。例如在SF = 10 的配置時,80°高仰角信道環境下,傳統LoRa 調制無論如何選取BW都會由于數據包持續時間過長,而使得一幀內的最大多普勒頻偏值超過頻率判決門限,導致解調出錯,因此不能適應LEO 衛星信道環境,而在所提參數可擴展的LoRa 調制中,將BW 擴展至1 MHz 時,一幀內的最大多普勒頻偏值不會超過頻率判決門限,因此能夠適應高仰角的動態多普勒頻偏,并且在低仰角的信道環境SF = 10 的配置下,也能夠完全適應信道中的衰減。上述優點在BER 測試中均得到驗證。
4 結束語
在傳統LoRa 調制的基礎上,提出了一種基于Chirp 波形且參數可配置和擴展的LoRa 調制方式,且在FPGA 中設計并實現了其物理層系統,在20°和80°衛星仰角的信道環境下,進行了誤碼性能測試。得出了傳統LoRa 信號的調制解調方法部分參數配置不能適應高動態LEO 衛星信道的結論,同時驗證了參數可擴展的LoRa 調制對比傳統LoRa 調制對LEO 衛星信道有更好適應性的這一優勢。未來將研究接收機時頻同步算法改造和差分LoRa 調制的方法,以適應LEO 高動態信道,使以LoRa 體制為代表的Chirp 波形能在LEO SIoT 場景中得到更好的應用。
參考文獻
[1] 茍亮,左云鵬,萬揚洋,等. 低軌衛星物聯網綜述[J].信息化研究,2022,48(5):1-9.
[2] 張千,劉詠. 國外低軌物聯網星座系統發展分析[J].空間電子技術,2023,20(4):20-26.
[3] KAMOONA Z J R,ILYAS M. Investigating thePerformance of LoRa Communication for Nominal LoRaand Interleaved Chirp Spreading LoRa[C]∥2022 International Conference on Artificial Intelligence of Things(ICAIoT). Istanbul:IEEE,2022:1-7.
[4] VANGELISTA L. Frequency Shift Chirp Modulation:TheLoRa Modulation [J]. IEEE Signal Processing Letters,2017,24(12):1818-1821.
[5] SAVAUX V,FEER? G. Simple Asymptotic BER Expressions for LoRa System over Rice and Rayleigh Channels[C]∥ 2021 Wireless Telecommunications Symposium(WTS). San Framsisco:IEEE,2021:1-4.
[6] CALLEBAUT G,VAN DER PEERE L. Characterization ofLoRa PointtoPoint Path Loss:Measurement Campaignsand Modeling Considering Censored Data [J ]. IEEEInternet of Things Journal,2020,7(3):1910-1918.
[7] FERNANDERS R,OLIVEIRA R,LU?S M,et al. On theReal Capacity of LoRa Networks:The Impact of Nondestructive Communications[J]. IEEE Communications Letters,2019,23(12):2437-2441.
[8] BERNIER C,DEHMAS F,DEPAIRS N. Low ComplexityLoRa Frame Synchronization for Ultralow Power Softwaredefined Radios [J ]. IEEE Transactions onCommunications,2020,68(5):3140-3152.
[9] XHONNEUS M,AFISIADIS O,BOL D,et al. A Lowcomplexity LoRa Synchronization Algorithm Robust toSampling Time Offsets[J]. IEEE Internet of Things Journal,2022,9(5):3756-3769.
[10]TAPPAREL J,AFISIADIS O,MAYORAZ P,et al. AnOpensource LoRa Physical Layer Prototype on GNURadio[C]∥IEEE 21st International Workshop on SignalProcessing Advances in Wireless Communications(SPAWC). Atlanta:IEEE,2020:1-5.
[11]WU T W,QU D X,ZHANG G X,Research on LoRaAdaptability in the LEO Satellites Internet of Things[C]∥2019 15th International Wireless Communications & MobileComputing Conference (IWCMC). Tangier:IEEE,2019:131-135.
[12]FERNANDEZ L,RUIZDEAZUA J A,CALVERASA,et al.Assessing LoRa for SatellitetoEarth CommunicationsConsidering the Impact of Ionospheric Scintillation[J].IEEE Access,2020,8:165570-165582.
[13]DOROSHKIN A A,ZADOROZHNY A M,KUS O N,et al. Experimental Study of LoRa Modulation Immunity toDoppler Effect in CubeSat Radio Communications [J].IEEE Access,2019,7:75721-75731.
[14]DOROSHKIN A A,ZADOROZHNY A M,GOREV V N,etal. First Flighttesting of LoRa Modulation in SatelliteRadio Communications in Lowearth Orbit[J]. IEEE Access,2022,10:100006-100023.
[15]YANG C,WANG M,ZHENG L,et al. Folded ChirprateShift Keying Modulation for LEO Satellite IoT[J]. IEEEAccess,2019,7:99451-99461.
[16]QIAN Y B,MA L,LIANG X W. Symmetry Chirp SpreadSpectrum Modulation Used in LEO Satellite Internet ofThings [J ]. IEEE Communications Letters,2018,22(11):2230-2233.
[17]QIAN Y B,MA L,LIANG X W. The Performance of ChirpSignal Used in LEO Satellite Internet of Things [J]. IEEECommunications Letters,2019,23(8):1319-1322.
[18]QIAN Y B,MA L,LIANG X W. The Acquisition Methodof Symmetry Chirp Signal Used in LEO Satellite Internetof Things [J]. IEEE Communications Letters,2019,23(9):1572-1575.
[19]樓才義,徐建良,楊小牛. 軟件無線電原理與應用(第2版)[M]. 北京:電子工業出版社,2014:118-205.
[20]CORAZZA G E,VATALARO F. A Statistical Model forLand Mobile Satellite Channels and Its Application toNongeostationary Orbit Systems[J]. IEEE Transactions onVehicular Technology,1994,43(3):738-742.
作者簡介:
王楚鳴 男,(1996—),碩士研究生。主要研究方向:衛星物聯網。
洪 濤 男,(1982—),博士,副教授。主要研究方向:衛星物聯網、衛星通信等。
鐘志偉 男,(2000—),碩士研究生。主要研究方向:衛星物聯網。
丁曉進 男,(1981—),博士,副教授。主要研究方向:空間信息網絡、衛星物聯網、頻偏智能認知等。
張更新 男,(1967—),博士,教授。主要研究方向:衛星通信、深空通信、空間信息網絡。
基金項目:國家自然科學基金(U21A20450,62171234,61971440);江蘇省前沿引領技術基礎研究專項(BK20192002);國家重點研發計劃(2022YFB2902600)
