無人機集群編隊變換虛擬仿真實驗設計和實現
2024-11-20 00:00:00詹建國單振宇陶國芳
教育教學論壇 2024年38期

[摘 要] 無人機的視覺智能、智能協同、規劃設計是人工智能深度學習技術、視覺識別技術等的成功應用,目前無人機實驗因涉及飛行器空域限制、實驗安全、人員管理等問題,無法開設實體實驗課程,特別是集群編隊實驗代價巨大。傳統教學中,這部分內容以理論講解為主,效率低、體驗差,難以激發學生的學習能動性。運用虛擬仿真手段,引導學生參與無人機集群表演設計全過程,通過編隊設計、路徑優化、燈光規劃等過程,幫助學生體驗人工智能項目設計流程和合作方式,掌握無人機集群飛行特點,理解多智能體協同,探索降低碰撞概率的方法,激發學生學習興趣,提高其實踐創新能力。
[關鍵詞] 無人機;虛擬仿真;人工智能
[基金項目] 2022年度浙江省高校實驗室工作研究項目“基于AI的無人機編隊虛擬仿真實驗項目開發”(ZD202201)
[作者簡介] 詹建國(1982—),男,浙江諸暨人,碩士,杭州師范大學信息科學與技術學院實驗師,主要從事虛擬仿真實驗項目建設和人工智能研究;陶國芳(1972—),男,浙江湖州人,學士,杭州師范大學實驗室與設備管理處高級工程師(通信作者),主要從事虛擬仿真實驗項目建設與管理研究。
[中圖分類號] G642.0 [文獻標識碼] A [文章編號] 1674-9324(2024)38-0001-06 [收稿日期] 2023-03-31
人工智能的工業應用需要融合多專業多學科的知識。盡早讓不同專業學生了解和熟悉人工智能技術,有助于他們結合本專業知識實現“人工智能化”的發展。然而,人工智能算法往往比較抽象難懂,需要結合具體應用進行教學講解。無人機應用可以生動形象地體現這些技術,比如無人機的視覺智能、智能協同、規劃設計就是人工智能深度學習技術、視覺識別技術等的成功應用。學生通過參與“機器人與人工智能”課程,可以實現理論知識運用于實際應用的落地,還可培養學生對人工智能的學習興趣、專業交叉應用能力、實踐動手能力,進而培養其創新思維和創新意識[1-2]。
一、實驗開設的背景和意義
“機器人與人工智能”是我校面向各個專業學生的通識課程,它圍繞人工智能的基本思想、基本理論、基本方法和應用展開,融合了人工智能和機器人技術的前沿知識,幫助學生提高參與人工智能項目的綜合能力,為后續發展打下基礎。課堂教學采用翻轉課堂、過程性評價等方式提高學習的能動性和互動性,引導學生探索人工智能前沿知識。為幫助不同學科背景的學生了解抽象的算法和模型,我們將人工智能技術融入應用系統,在動手實驗中加深對方法、步驟和原理的理解。不同專業學生組隊參與人形機器人、智能小車、無人機等智能系統項目的開發,并承擔不同的角色,從而理解不同專業知識在人工智能項目中的作用,實現多學科的融合和學生的個性化發展。
多智能體協同是分布式人工智能的一個重要分支,也是本課程的一項重要教學內容,主要包括多智能體規劃、協商、交互機制等理論,在軍事、交通、醫療等眾多領域有廣泛的應用前景。無人機集群是多智能體協同的一個重要載體和測試場景。近幾年,無人機集群的商業表演吸引了大量的目光,也激發了學生的學習興趣。為幫助學生更好地理解多智能體路線規劃技術,本課程引入無人機集群編隊實驗。學生通過組隊設計無人機集群編隊表演,探索無人機飛行路徑優化方法,體驗多智能體協同開發流程。
目前,無人機實驗因場地、人數和設備等原因無法開設實體實驗課程,特別是集群編隊實驗代價巨大,還涉及飛行器空域限制、實驗安全、耗時、人員管理等問題。傳統教學中,這部分內容以理論講解為主,效率低、體驗效果欠佳,難以激發學生學習能動性。本項目運用虛擬仿真手段,引導學生參與無人機集群表演設計全過程,通過編隊設計、路徑優化、燈光規劃等過程,幫助學生體驗人工智能項目設計流程和合作方式,掌握無人機集群飛行特點,理解多智能體協同,探索降低碰撞概率的方法,激發學生學習興趣,提高其實踐創新能力[3]。
二、實驗目的
第一,幫助學生掌握無人機集群編隊變換的基本原理,通過實際案例使學生實踐無人機編隊設計、編隊變換、燈光演示等操作過程,掌握無人機飛行和燈光控制的基本接口;通過完成無人機集群陣列變換項目,體會不同學科知識在人工智能項目分工中的作用,培養人工智能思維,實現知識、技能和素質的有機融合。
第二,幫助學生探索航跡控制和風險控制方法,推動學生探索使用人工智能方法規劃最優飛行路徑,降低集群系統碰撞發生概率,培養學生解決復雜問題的綜合能力;突破學校教學設施的時空限制,使學生能夠隨時隨地單獨進行虛擬操作,熟悉無人機集群編隊這一人工智能技術的重要載體,提高實驗過程的直觀性和體驗感[4-5]。
三、實驗原理、教學過程與實驗方法
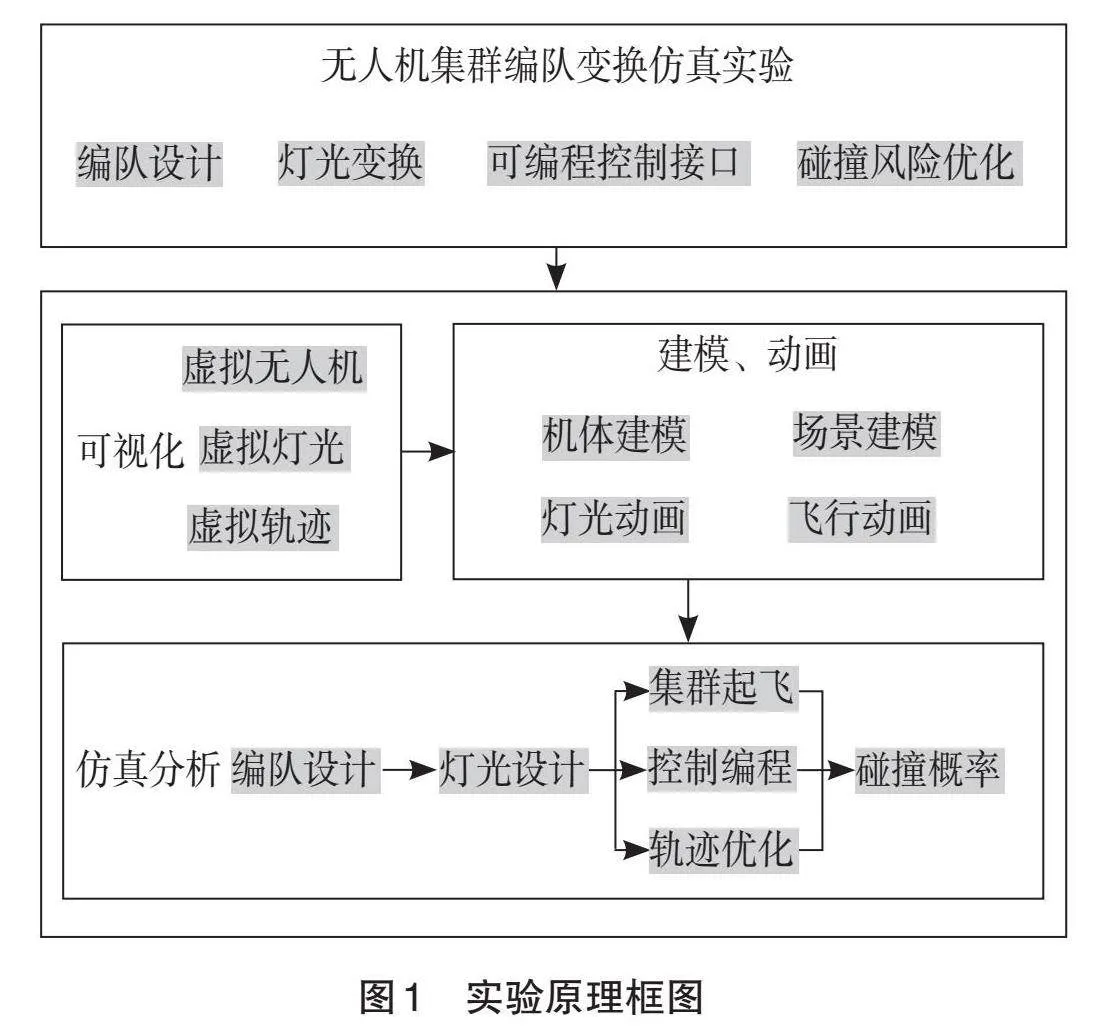
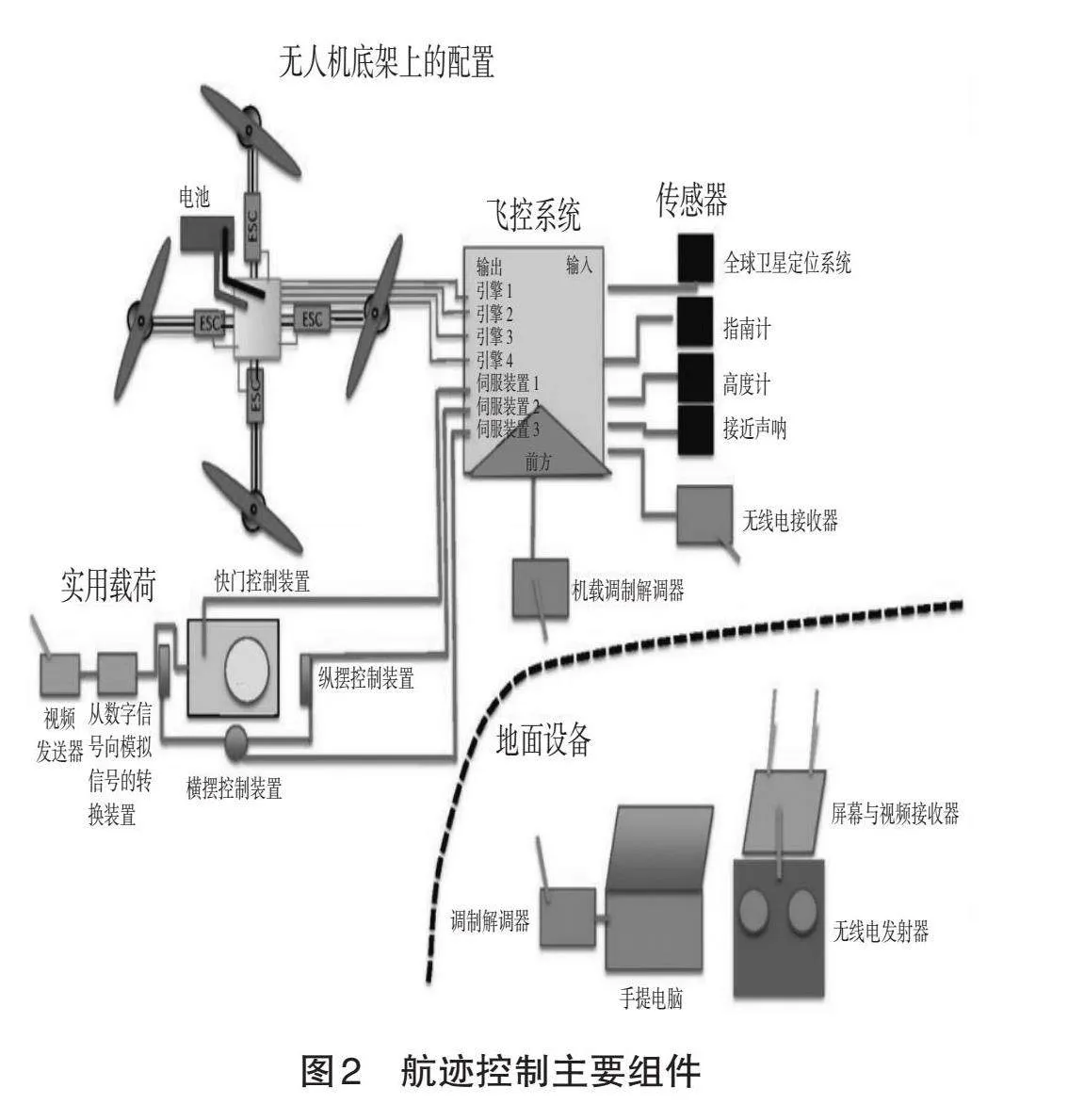
本實驗項目通過3D建模、動畫模擬、3D人機交互、可視化等方法仿真無人機集群編隊變換的動態過程[3],其原理框圖見圖1。無人機集群不同陣列之間的變化是通過中央處理平臺集中控制實現的,航跡控制主要組件見圖2。
(一)實物場景下的實驗原理
航跡控制原理:控制系統需要事先編排好每架飛機的位置、燈光和航跡方案,再通過每架飛機的飛控、定位、通信等系統實現集群陣列變化的表演[4-5]。
1.飛控系統。本項目仿真四軸可編程無人機。它的飛行控制能力強,可實現前飛、后飛、懸停、平移,以及向任何方向調整自己的位置。為確保無人機飛行穩定,中央處理平臺需要掌握一定的飛行數據。傳感器可以接收所有加速度、速度、高度、傾斜度的數據,將其轉化為電流傳輸給機上的計算器,并最終傳輸給中央處理平臺。無人機整列變化中需要用到的傳感器包括:壓力傳感器,控制無人機相對于出發點的高度,高度每升高30米,大氣壓下降千分之一;加速度儀,實時測量無人機傾斜度,控制飛行高度;陀螺儀,共有3個(每條軸線上一個),測量每條軸線上的旋轉角速度。陀螺儀對溫度很敏感,每次系統啟動都會自動校準。
2.定位系統。室外定位系統采用民用GPS,其定位精度只有3~5米。直接用GPS定位,由于難免存在誤差,定位精度達不到編隊飛行的要求。為提高定位精度,定位時采用差分GPS技術。需要事先在地面上架設一個GPS基準站,地面基準站有事先標注準確的空間坐標,然后跟實時測量到的GPS結果進行差分。無人機則根據收到的誤差信息對自己的位置進行實時糾偏。
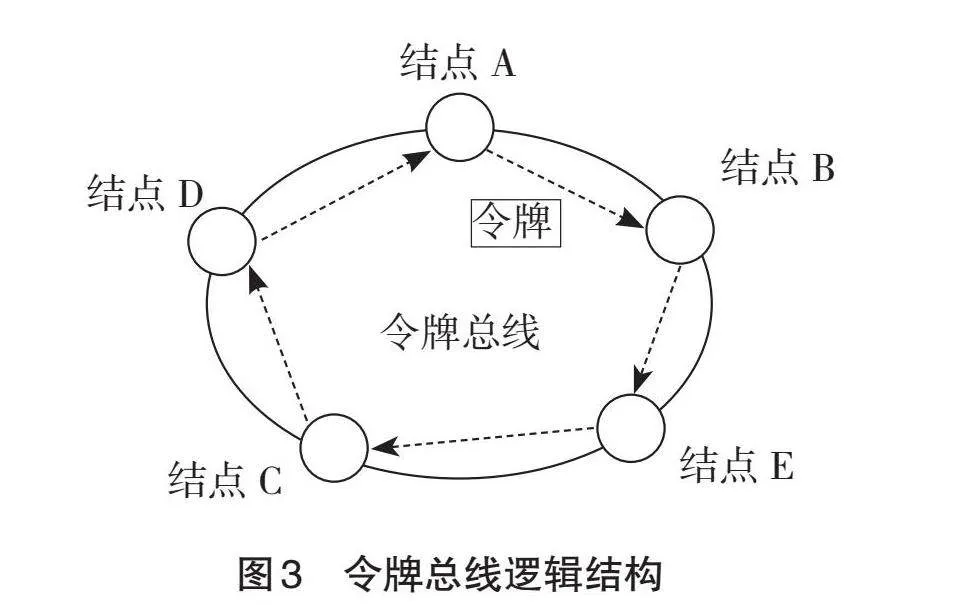
3.通信系統。中央控制平臺和單機之間的通信采用移動通信技術或無線電技術。移動通信技術主要為4G或5G信號,相對于無線電來說帶寬更寬,可容許大量的通信設備,缺點是受移動信號范圍控制。無線電技術主要為IEEE 802.5令牌環網技術,“令牌”在無人機之間快速反復地傳遞,確保每一架無人機都有機會與中央控制平臺通信,令牌總線邏輯結構如圖3所示。
IEEE 802.5的基本原理是利用令牌避免網絡沖突,提高網絡的數據傳送率。傳送數據時會由掌握令牌的中央控制設備先發送數據。接收數據的無人機會檢查表頭,若是送給自己的則進行處理。無論是否是送給自己的,都會再傳下去,傳一圈后檢查資料是否相同以確定資料沒有傳輸錯誤。送完數據后可依需要調整令牌的優先度,再把令牌傳遞到下一臺無人機。若接收到令牌,但優先度較自己的高,則要把令牌傳遞到下一臺無人機。
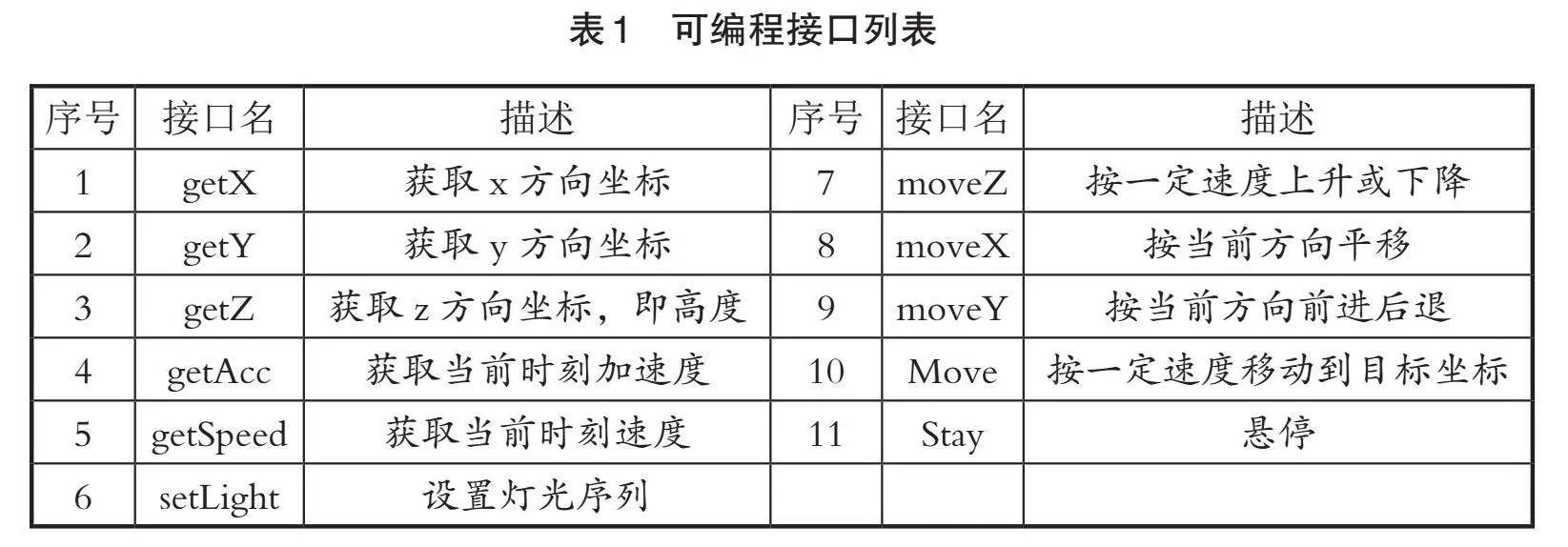
(二)無人機可編程控制接口
中央控制平臺通過可編程接口控制無人機集群的陣列變換。控制平臺先通過通信系統獲取每架飛機的位置、速度、加速度等信息,然后按照預設的航跡給每架飛機發送飛行控制指令,最后再根據位置和加速度信息,對每架飛機的位置進行微調。這些信息的獲取和發送,都可以通過中央控制平臺的可編程控制接口實現,見表1。
(三)碰撞風險優化原理
無人機陣列變換要控制好每架無人機飛行的航跡,最重要的是在有限的飛行距離下降低無人機碰撞發生的概率。無人機集群的目標是不能讓任何兩架飛機在飛行途中發生碰撞,即任何一架飛機的最大碰撞概率表明了整個系統的碰撞風險。編號i和j無人機發生碰撞的概率采用正態分布的形式表示,兩架無人機離得越近越容易發生碰撞,計算公式為:
其中,μ為均值,σ表示標準差。dis(i,j)表示兩架無人機相距最近時刻的歐式距離,在整個飛行過程中離散化成1秒計算一次相互距離,那么,
其中,T表示兩個陣型變化需要的時間間隔,編號為i的無人機在t時刻的坐標為(xit,yit,zit)。無人機集群表演時,不發生碰撞,即需要滿足。同時,考慮到無人機飛行會耗費電能,飛行距離越短越好,因為不同無人機之間電源容量相近,保證飛得最遠的無人機飛行距離小于設定的電源要求即可,每架無人機飛行的距離需要滿足di<dmax,dmax表示每次飛行的最大距離。di定義為:
其中,N表示航跡點的數目,即飛機變化飛行軌跡的重要節點。為減少變速和變軌的復雜性,設定每次陣型變化只允許設置3個航跡點。
碰撞風險優化過程可以理解為保證p<10-6的情況下,di盡可能小。上述求解過程是多目標優化問題,很難找到解析解,可以采用遺傳算法求解局部最優解[6-7]。另外,碰撞風險優化是開放性的問題,可以使用除遺傳算法之外的人工智能、數學、物理等方法進行優化。
(四)虛擬場景下的實驗原理
為讓學生更好地理解人工智能的智能體協同概念,對機體、燈光和飛行場景,飛控、定位和通信系統,無人機可編程控制接口,編隊變換設計過程以及碰撞概率優化過程進行了仿真。該實驗對無人機集群編隊過程核心要素仿真度較高,是仿真環境下的真實體驗。
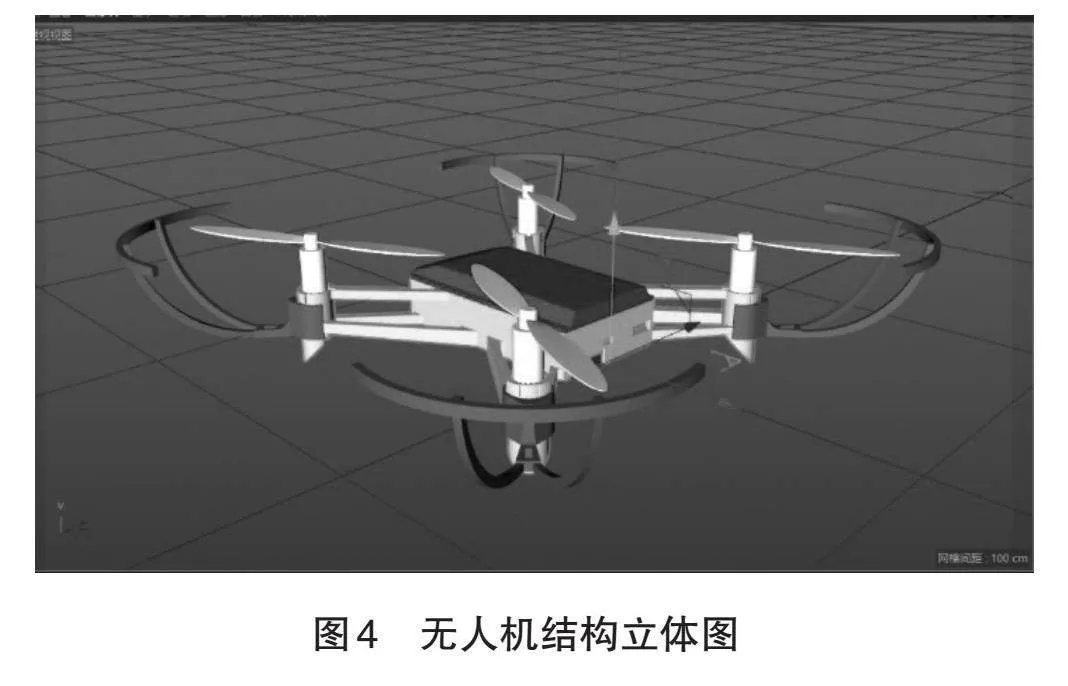
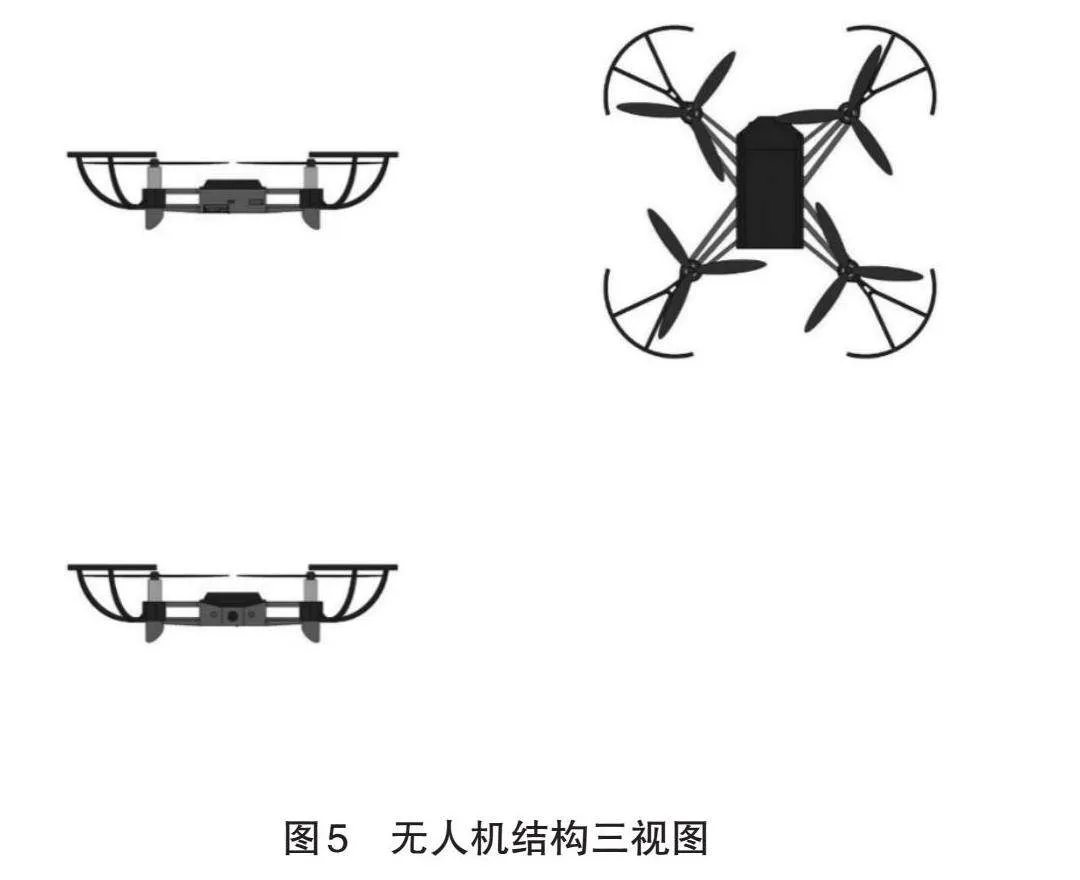
1.機體、燈光和飛行場景的建模。無人機仿真采用物理部件3D掃描件,為真實物理部件在虛擬空間的再現,核心要素仿真度100%。燈光為三維平面皮膚覆蓋效果,燈光效果仿真度超過80%。圖4和圖5分別為無人機的立體結構圖和三視圖。地形場景采用全景效果圖方式,體現立體空間位置和大小的關系,實現日照、天地差異的建模。采用物理運行軌跡控件,實現飛機起飛、飛行和降落的動畫效果。
2.飛控、定位和通信系統的仿真。本項目通過構建三維坐標系統,確定飛機在虛擬空間的位置和速度,仿真了無人機的加速度、速度、高度傳感器。學生可以實時觀察每架無人機的狀態信息。定位系統采用經緯度坐標轉化為XYZ坐標轉換方法,實時仿真飛機經度和緯度與三維空間的對應關系。無人機之間的通信由系統控制實現,實現了單機和中央控制系統之間的實時通信,仿真了通信過程,但并未仿真通信協議。
3.無人機可編程控制接口仿真。本項目實現了對常用可編程控制接口函數的仿真。實物系統中,學生編寫飛行程序后,導入真實無人機實現飛行控制。在仿真系統中,相同的程序可以直接導入仿真系統,仿真系統進行編譯后,實現對虛擬無人機集群的控制。
4.編隊變換設計過程的仿真。本項目將編隊變換過程分為編隊設計、燈光規劃和風險控制等步驟,用戶通過三維空間的交互操作,實現對編隊變換過程的實驗。在實驗過程中,學生可以按需設置隊列陣型和燈光配置,并通過飛行模擬動畫查看設置效果。如果設置參數不合理,或者不能正確規劃飛行路徑,都有可能導致碰撞風險過高。
5.碰撞概率優化過程的仿真。碰撞概率優化的計算過程由人工智能軟件完成。學生將計算結果通過無人機可編程控制接口導入仿真系統,實現碰撞概率的優化。學生只有理解、掌握了無人機控制函數和遺傳算法,才能獲得較佳的航跡路徑規劃結果。學生在進行驗證測試時,實驗軟件還會記錄不同時刻無人機的位置,比較無人機碰撞概率和飛行距離,用于對學生實驗結果的客觀評價。
四、系統架構、開發環境和運行效果
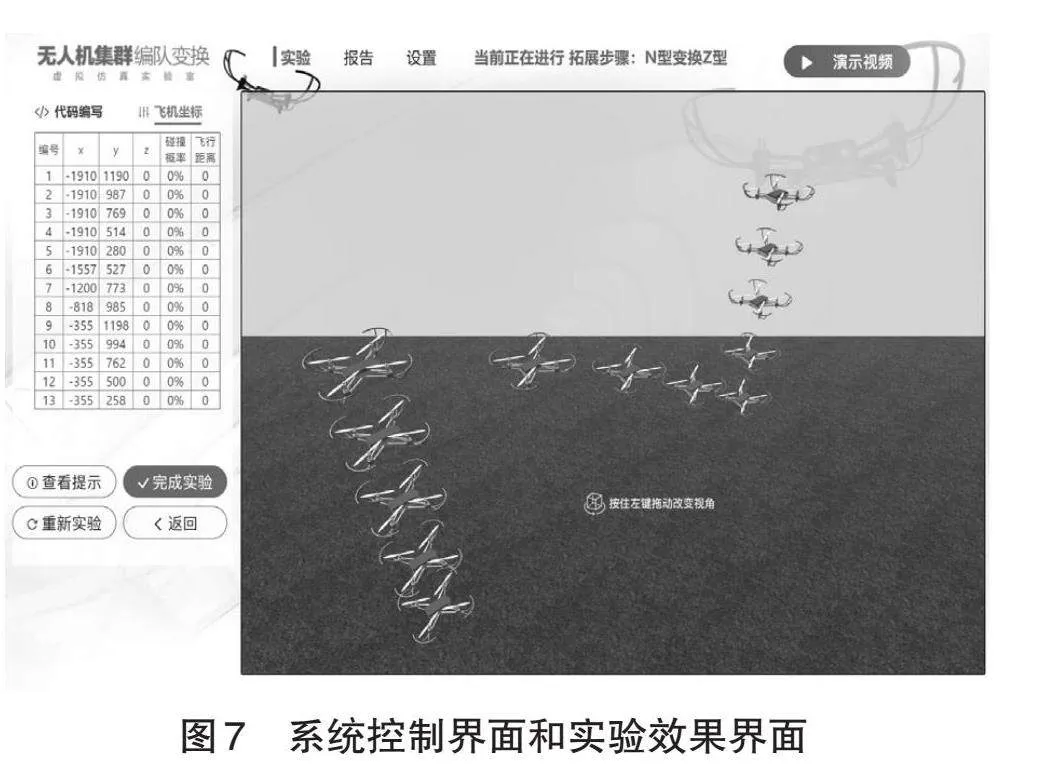
系統平臺由遠程云服務器和本地實驗系統組成,云服務器用于存儲實驗仿真數據、用戶信息、教師評價等內容;本地實驗系統分為數據處理、資源管理和系統管理等模塊。系統開發技術和運行環境:3D仿真、HTML5,開發工具:Unity 3D、Web 3D開發包three.js,運行環境:服務器CPU16核、內存16 GB、磁盤240 GB、顯存1 GB、GPU型號i7-8750H、操作系統Windows Serve,數據庫Mysql。無人機集群編隊變換虛擬仿真實驗平臺見圖6,系統控制界面和實驗效果界面見圖7。
五、實施過程和效果
本項目以無人機集群為載體,運用三維建模工具搭建無人機集群編隊變換仿真系統,將無人機集群操作涉及的多個知識點融合,學生通過仿真平臺體驗真實場景下的無人機集群編隊表演開發過程。在交互過程中,學生可以通過鼠標和鍵盤實現自由操作,設計編隊陣型、規劃燈光模式、查看飛行參數等,實現無人機陣列的旋轉和縮放功能;通過可編程接口可以設置各項飛行參數,控制每架無人機的飛行速度、方向和距離。通過虛擬仿真實驗,學生加深了對無人機操控體系的理解,提高了對編隊控制、風險優化的理解能力;在編隊設計和燈光控制環節中,學生可以充分展示自己的空間想象力,實時獲取設計結果的動畫展示過程,加深對集群控制的理解;在三維場景中,多視角、多尺度完成各個實驗步驟,提高編隊設計的開放性,倡導探究式學習,提升了學生綜合實踐能力[6-7]。
參考文獻
[1]萬其中,李文生.高校實驗教學改革與創新人才培養[J].當代教育論壇(宏觀教育研究),2007(4):103-105.
[2]賀占魁,黃濤.虛擬仿真實驗教學項目建設探索[J].實驗技術與管理,2018,35(2):108-111+116.
[3]熊宏齊.國家虛擬仿真實驗教學項目的新時代教學特征[J].實驗技術與管理,2019,36(9):1-4.
[4]鄧磊,段福洲,李家存,等.虛擬仿真實驗教學模式探索:以無人機航測綜合實習為例[J].科技創新導報,2019,16(35):234-237.
[5]賈宜霖,岳訓.引領式空中漢字展示無人機集群的仿真研究[J].無人系統技術,2021,4(3):32-39.
[6]盧燕梅,宗群,張秀云,等.集群無人機隊形重構及虛擬仿真驗證[J].航空學報,2020,41(4):248-259.
[7]劉艷,劉全德.無人機飛行模擬仿真平臺設計[J].科學技術與工程,2022,22(29):12969-12976.
Design and Implementation of Virtual Simulation Experiment for Formation Transformation
of UAV Cluster
ZHAN Jian-guoa, SHAN Zhen-yua, TAO Guo-fangb
(a. School of Information Science and Technology, b. Laboratory amp; Equipment Management Department, Hangzhou Normal University, Hangzhou, Zhejiang 311121, China)
Abstract: The visual intelligence, intelligent collaboration, planning, and design of UAVs are successful applications of artificial intelligence deep learning technology and visual recognition technology. At present, UAV experiments cannot be performed due to issues like air traffic control, safety concerns in conducting experiments, personnel management, and especially the huge cost associated with conducting experiments on the formation and swarming flying, which makes experiments with UAV difficult to carry out. In traditional teaching, this part of the content is mainly based on theoretical explanations, which offers low efficiency and poor experience. This method is also unable to stimulate students’ learning initiatives. This project uses virtual simulation methods to guide students to participate in the entire process of UAV cluster performance design. Through formation design, path optimization, lighting planning, and other processes, the project helps students participate in the designing process and different collaborations, master the special features of UAV cluster flight, understand multi-agent coordination, explore ways to reduce the probability of collisions, stimulate interest in learning, and improve abilities to innovate and to apply the knowledge to practical issues.
Key words: UAV; virtual simulation; artificial intelligence
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
南風窗(2016年19期)2016-09-21 16:51:29
南風窗(2016年19期)2016-09-21 04:56:22
企業導報(2016年9期)2016-05-26 20:58:26
