基于機器視覺的茄子采摘機系統(tǒng)設(shè)計研究
2024-12-31 00:00:00黃鑫穆龍濤張瑤
鄉(xiāng)村科技 2024年13期
關(guān)鍵詞:機器視覺

摘 要:在茄子的生產(chǎn)過程中,收獲是最艱難的環(huán)節(jié),其工作量占所有工作過程工作量的50%~70%。為減輕工人勞動強度,提高農(nóng)業(yè)生產(chǎn)效率,設(shè)計了一種能夠代替人工的茄子采摘機。該茄子采摘機主要由三維(3D)空間移動機構(gòu)、識別、抓取機構(gòu)、自行走機構(gòu)、收納機構(gòu)等組成。首先,借助視覺裝置計算出茄子的幾何中心坐標;其次,利用機械本體將末端抓取機構(gòu)通過優(yōu)化移動算法移動到茄子所在坐標,并實現(xiàn)茄子的采摘和收集;最后,自行走機構(gòu)驅(qū)動整個機器人直線前進,實現(xiàn)連續(xù)采摘。該茄子采摘機的推廣應用可以促進農(nóng)業(yè)生產(chǎn)結(jié)構(gòu)優(yōu)化調(diào)整,推動農(nóng)業(yè)產(chǎn)值的提升,助力新農(nóng)村建設(shè)。
關(guān)鍵詞:機器視覺;農(nóng)業(yè)機械;茄子采摘
中圖分類號:TP391.4;S225 文獻標志碼:B 文章編號:1674-7909(2024)13-146-4
DOI:10.19345/j.cnki.1674-7909.2024.13.033
0 引言
隨著農(nóng)業(yè)機械化的不斷推進和人工成本的不斷增加,農(nóng)業(yè)領(lǐng)域逐漸出現(xiàn)了各種智能化機械,果蔬類采摘機就是其中之一。通常,果蔬類采摘機需要通過控制系統(tǒng)來實現(xiàn)自主行走、果實識別與選擇、機械臂控制等功能。果蔬類采摘機可以代替農(nóng)民手動采摘果實,提高采摘效率和質(zhì)量,減輕人工勞動強度。因此,研發(fā)果蔬類采摘機對推動現(xiàn)代農(nóng)業(yè)的可持續(xù)發(fā)展、實現(xiàn)農(nóng)業(yè)生產(chǎn)的高效化與智能化具有一定的現(xiàn)實意義[1]。
該項目目標是研發(fā)一種基于機器視覺的茄子采摘機,主要設(shè)計任務有以下幾個方面。其一,對系統(tǒng)進行整體規(guī)劃和結(jié)構(gòu)設(shè)計。其二,以樹莓派微型電腦為數(shù)據(jù)處理單元,對硬件電路進行設(shè)計和改進,使其功能更加完善。系統(tǒng)硬件電路主要包括步進電機驅(qū)動電路、視覺采集電路、抓取與采摘電路、限位電路等部分。其三,系統(tǒng)的軟件編制。按照軟件實現(xiàn)的功能,以Python程序為架構(gòu),主要分為主程序、初始化子程序、步進電機驅(qū)動子程序、圖像處理子程序、限位子程序。在程序編寫過程中,加入了詳細的文字注釋,以便于后期的改進與維護。其四,機械本體和控制系統(tǒng)的聯(lián)合調(diào)試。
1 機械本體設(shè)計
1.1 機械手爪的結(jié)構(gòu)設(shè)計
茄子采摘機的手爪能夠模仿人手的部分動作,可按照設(shè)定的程序、軌跡和要求,代替人進行單調(diào)持久的作業(yè)。采摘機手爪的設(shè)計需要考慮以下幾個方面。
1.1.1 結(jié)構(gòu)設(shè)計
采摘機手爪應該具有足夠的靈活性和可調(diào)性,能夠適應不同形狀和大小的茄子抓取和搬運。
1.1.2 控制系統(tǒng)
采摘機手爪的控制系統(tǒng)需要具有高精度和高速度的控制能力,能夠快速響應和調(diào)整夾取力度和姿態(tài)。該設(shè)計擬采用MG996R舵機進行控制。
1.1.3 材料選擇
采摘機手爪的材料應具有高強度、輕量化、耐磨性和耐腐蝕性等特性,以提高采摘機的使用壽命和穩(wěn)定性。該設(shè)計擬采用鋁合金進行制作。
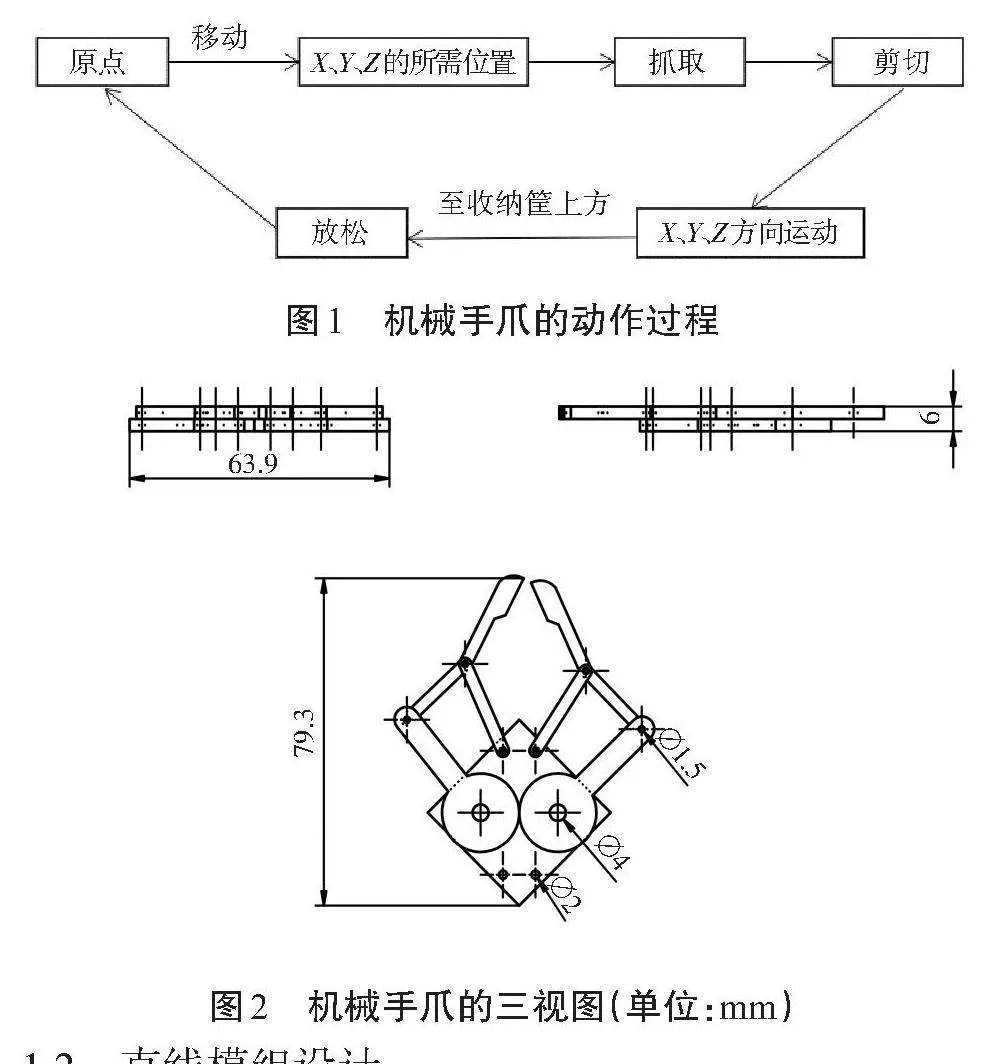
根據(jù)對茄子采摘機的夾緊過程及剪切要求分析,機械手爪的動作過程如圖1所示。機械手爪的三視圖,如圖2所示。
1.2 直線模組設(shè)計
1.2.1 直線模組的選型
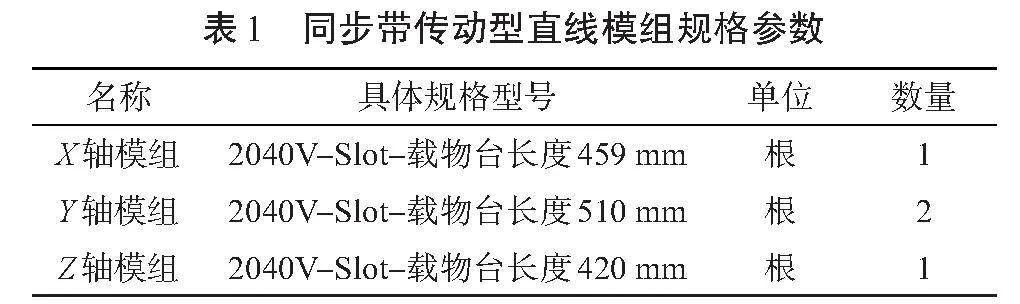
對空間移動與定位機構(gòu)的選型,要綜合考慮3個自由度功能直線模組的匹配程度(主要考慮2個模組系列的外形尺寸及整體質(zhì)量、最高速度、使用方式導致的最大承載重量等因素)[2]。該設(shè)計選擇了2040V-Slot規(guī)格系列的直線模組(用于執(zhí)行伸縮自由度),最終選定的同步帶傳動型直線模組的具體規(guī)格型號如表1所示。
1.2.2 步進電機的選型
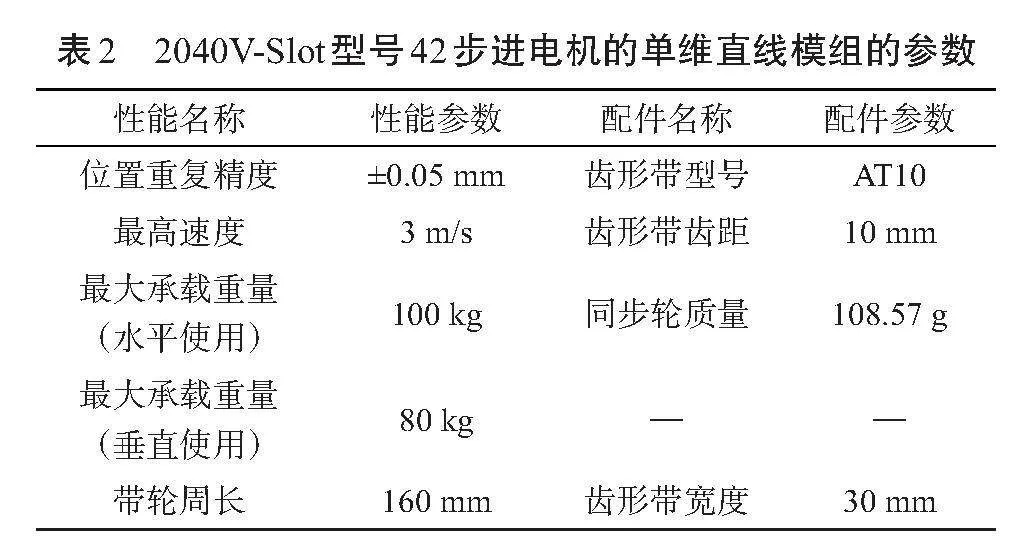
該茄子采摘機的電氣控制系統(tǒng)需要通過電機驅(qū)動同步帶模組在單個維度內(nèi)做直線運動。為了實現(xiàn)采摘機的高精度運動,需要使電機運行平穩(wěn),故選用兩相四線制的42步進電機,搭配TB6600驅(qū)動器配套使用,查表可知電機的保持力矩為2.44 N·m。由于采摘機的安裝定位裝置重量不大,采摘機工作時電機負載較小,42步進電機可以滿足采摘機的設(shè)計需求。搭載42步進電機的單維直線模組的參數(shù)如表2所示。
1.3 其他機械機構(gòu)設(shè)計
1.3.1 自行走機構(gòu)
該機構(gòu)采用四輪布置、前輪驅(qū)動的結(jié)構(gòu),驅(qū)動方式采用同3.2中的步進電機驅(qū)動。
1.3.2 收納結(jié)構(gòu)
為了實現(xiàn)采摘機的平穩(wěn)運行,采摘時需要左右交替分別放置茄子。在采摘機的左右兩側(cè)各安裝了一個收納箱,用于茄子的存放。
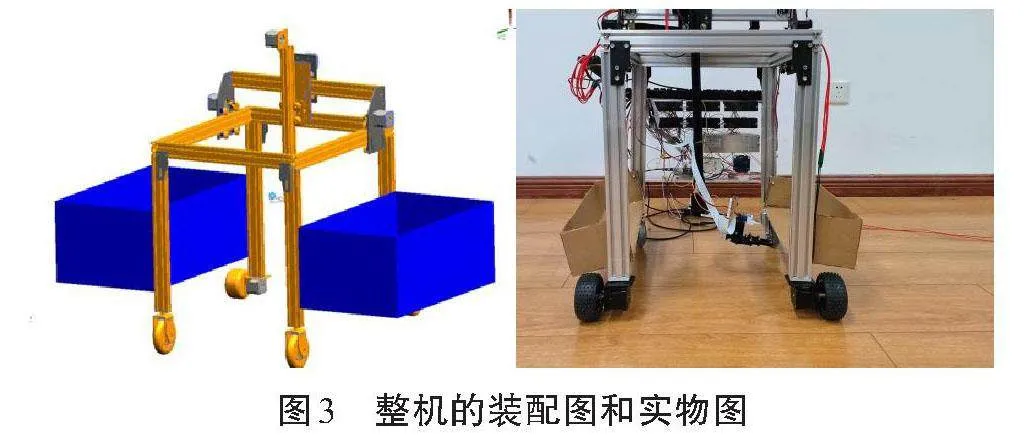
綜合上述,該茄子采摘機裝配圖和實物圖如圖3所示。
2 控制系統(tǒng)設(shè)計
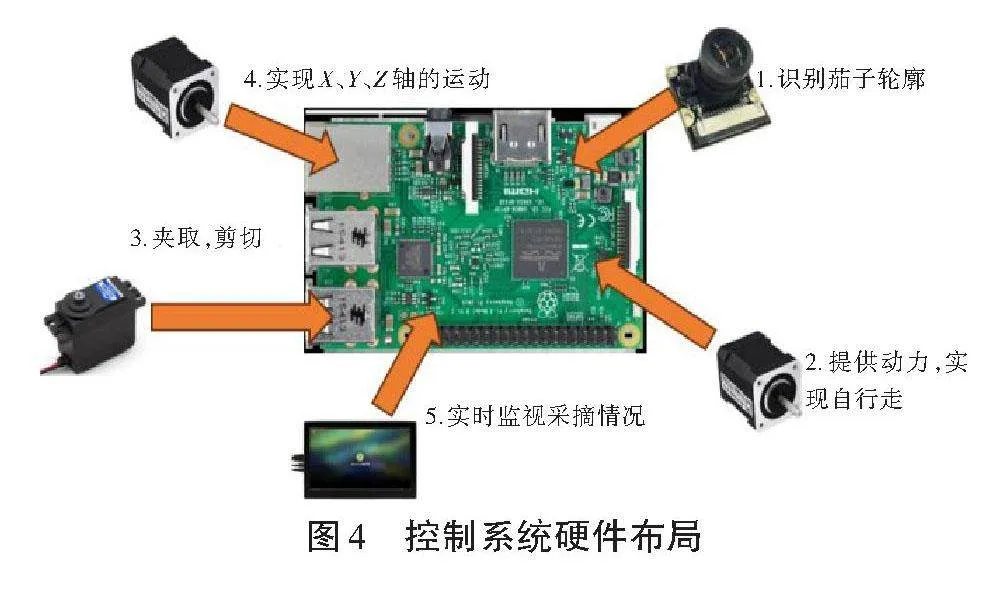
所有的微控制器當中,僅一個微控制器芯片是不足以完成一個控制系統(tǒng)的,往往需要搭配其他類型的外設(shè)來完成預期目標。該次設(shè)計的控制系統(tǒng)采用基于樹莓派的控制架構(gòu),除了控制器芯片外,還需要電源電路、步進電機控制電路、舵機控制電路、攝像頭識別電路、顯示器顯示電路等[3]。該設(shè)計的控制系統(tǒng)硬件布局如圖4所示。
2.1 電源電路
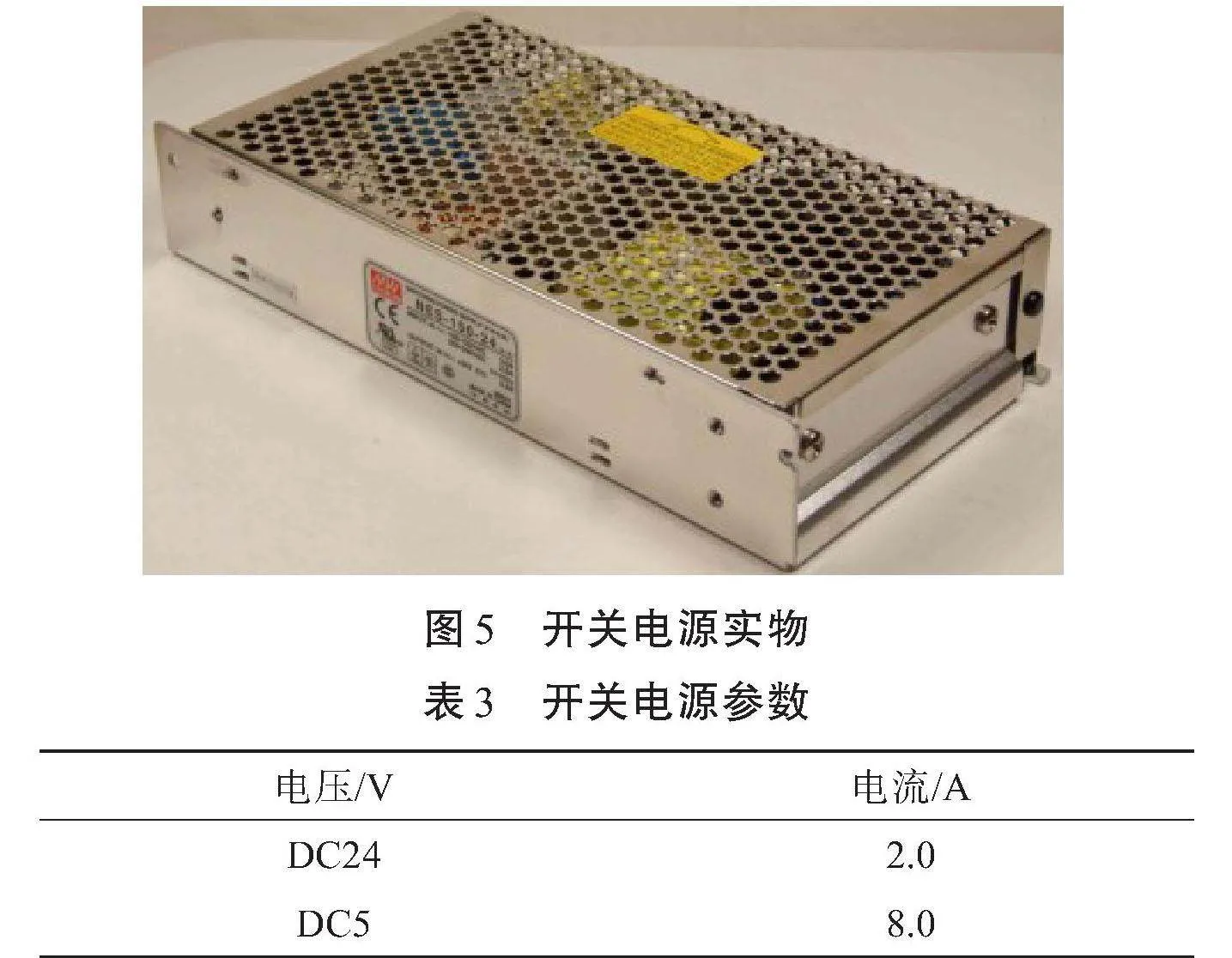
由于該系統(tǒng)需要提供DC24V和DC5V兩種電壓,設(shè)計時考慮了如下幾種方案[4]。方案1:采用24 V蓄電池為系統(tǒng)供電,再經(jīng)過電源轉(zhuǎn)換模塊得到5 V電壓。雖然蓄電池具有較強的電流驅(qū)動能力及穩(wěn)定的電壓輸出性能,但是蓄電池的體積過于龐大,價格也比較昂貴,在設(shè)計的前期試驗階段使用極為不方便。方案2:采用220 V開關(guān)電源給系統(tǒng)供電。經(jīng)過試驗驗證,在系統(tǒng)工作時,樹莓派、傳感器的工作電壓能夠滿足系統(tǒng)要求,而且使用方便。綜上所述,該設(shè)計采用方案2,開關(guān)電源如圖5所示。其參數(shù)如表3所示。
2.2 步進電機控制電路
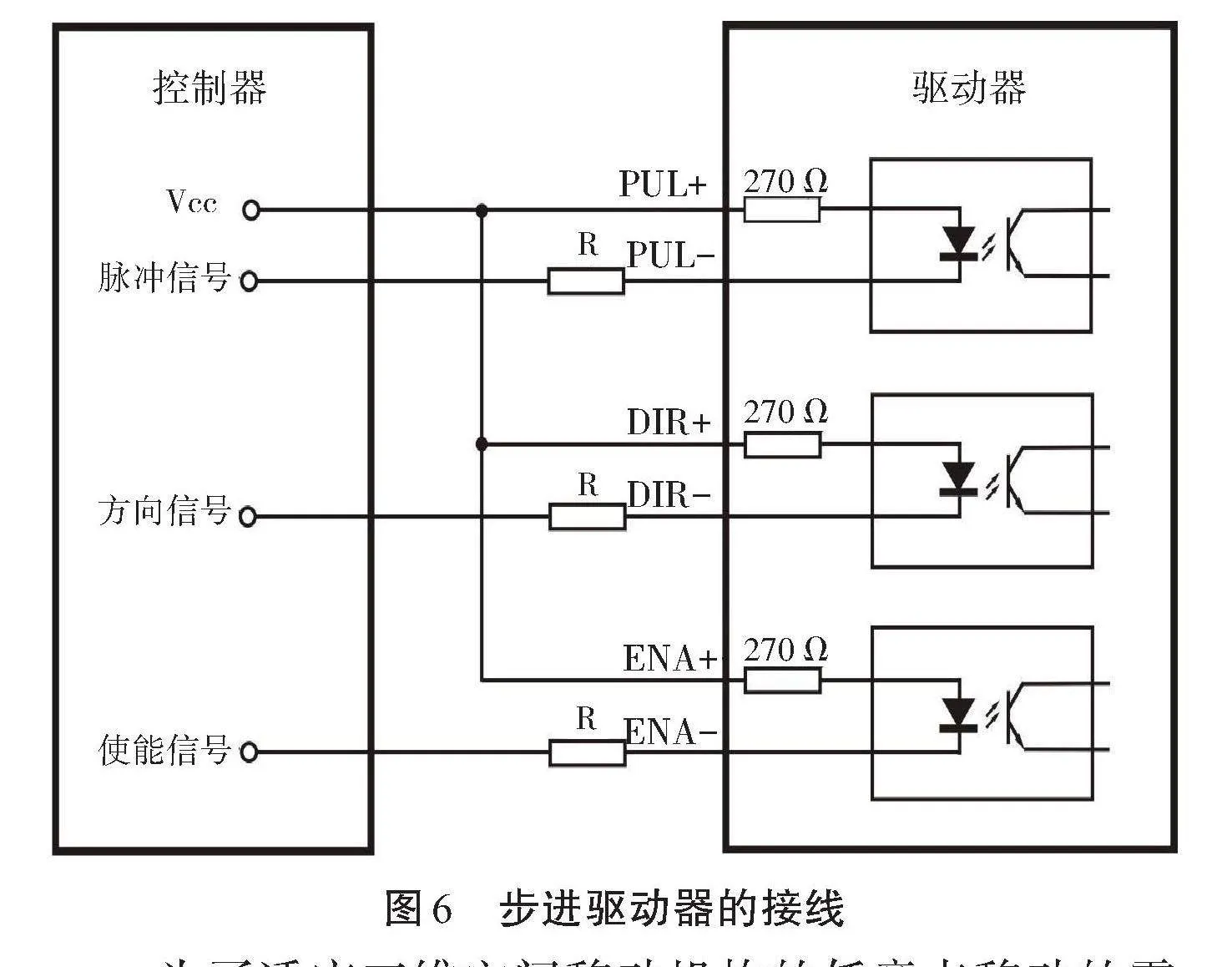
TB6600步進電機驅(qū)動器是一款專業(yè)的兩相步進電機驅(qū)動,可實現(xiàn)正、反轉(zhuǎn)控制。通過S1S2S33位撥碼開關(guān)選擇8擋細分控制,通過S4S5S63位撥碼開關(guān)選擇8擋電流控制(0.5 A、1.0 A、1.5 A、2.0 A、2.5 A、3.0 A、3.5 A、4.0 A)。該設(shè)計中步進驅(qū)動器采用共陰極連接,如圖6所示。
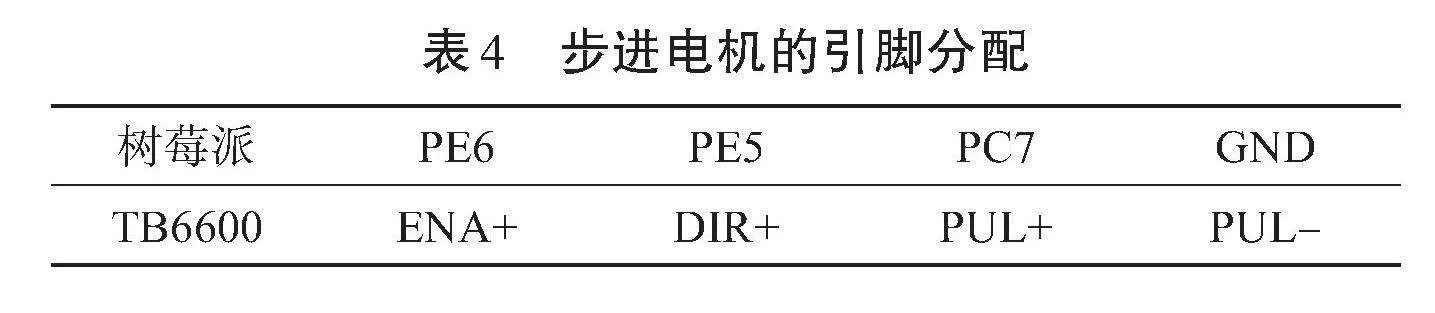
為了適應三維空間移動機構(gòu)的任意點移動的需求,需要控制步進電機的正、反轉(zhuǎn),TB6600與控制器的引腳連接如表4所示。
3 整機的聯(lián)合調(diào)試
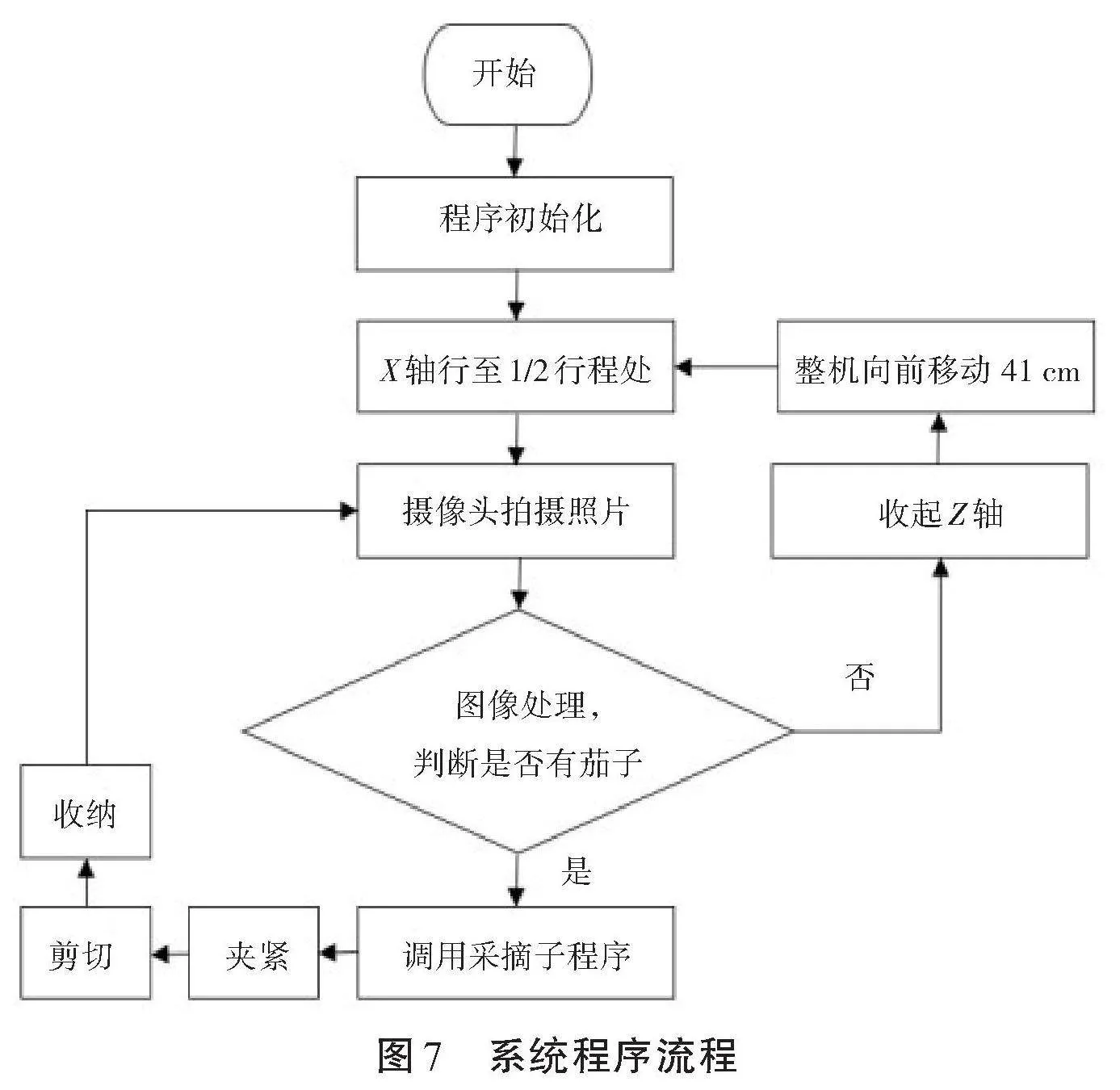
3.1 系統(tǒng)主程序設(shè)計及流程圖
系統(tǒng)進入主程序后,首先要初始化Color_rec、Gpio_control、Move_mgr、SG90_lib、Tb6600函數(shù),然后打開攝像頭,將三維移動機構(gòu)運動到機械原點,做好采摘茄子的準備。程序工作的流程簡單描述如下。
步驟1:通過攝像頭拍取照片,經(jīng)過視覺處理算法,實現(xiàn)對茄子的識別,求出茄子最小包絡(luò)矩形的幾何中心坐標點(X,Y,Z)。
步驟2:通過三維(3D)空間移動機構(gòu),將末端執(zhí)行機構(gòu)移動到目標點(X,Y,Z)處,利用采摘機構(gòu)完成對單個茄子的采摘。
步驟3:將采摘到的茄子放入收集箱,進行下一步采摘,直到完成當前區(qū)域內(nèi)全部成熟茄子的采摘,該過程稱為一次采摘大循環(huán)。
步驟4:自走式機構(gòu)向前移動41 cm,進行下一次采摘大循環(huán),直至一行茄子全部采摘完畢。
程序流程如圖7所示。
3.2 整機的調(diào)試結(jié)果
茄子采摘機能否高效準確地完成采摘任務,主要由2個指標決定,一是系統(tǒng)對茄子果實識別的準確率,二是識別成功后機械本體的采摘成功率,故調(diào)試過程中設(shè)計了2個方面的試驗來驗證茄子采摘機的性能。
3.2.1 識別定位試驗
試驗的地點為學校實驗大樓,試驗對象為擬態(tài)茄子。該茄子采摘機在不同光照情況下的識別結(jié)果如表5所示。
由表5可知,識別系統(tǒng)在較暗、正常和較亮3種情況下的識別成功率分別為78.0%、91.3%和72.2%。由該結(jié)果可知,該系統(tǒng)在較亮的環(huán)境下識別性能相對較差,在環(huán)境光線正常和較暗的情況下識別準確率均在70%以上,故該采摘機識別系統(tǒng)可在一定條件下滿足茄子的采摘需求,部分識別結(jié)果如圖8所示。
3.2.2 采摘試驗
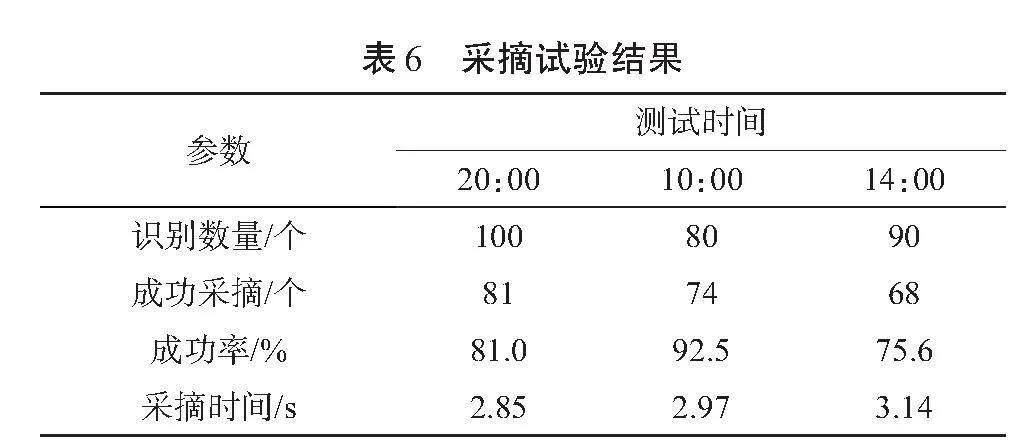
該茄子采摘機在空間移動與定位機構(gòu)上安裝采摘末端執(zhí)行機構(gòu),并在Z軸末端搭載視覺相機,并裝有采摘手爪和剪切裝置。采摘時,機械本體在視覺相機的引導下,將手爪對準并貼近擬態(tài)茄子表面,然后執(zhí)行采摘操作,擬態(tài)茄子在手爪閉合過程中被剪切裝置切斷果柄,使擬態(tài)茄子果梗與果實分離[5]。最終測得茄子采摘機的采摘成功率和單果采摘時間等數(shù)據(jù),如表6所示。
由表6可知,在準確識別視野內(nèi)的擬態(tài)茄子果實的基礎(chǔ)上,3個時間點下采摘成功率均在75%以上,單果平均采摘時間為2.99 s,在一定條件下可滿足茄子采摘的技術(shù)要求。
4 結(jié)論與討論
茄子采摘機在技術(shù)層面取得了一定的突破,能夠?qū)崿F(xiàn)自主行走、智能識別和果實采摘,大大減輕了采摘工人的勞動強度。然而,該設(shè)備仍然存在以下問題。
4.1 智能識別的準確性有待提高
由于果實的形狀和顏色各異,該茄子采摘機在識別上仍然存在誤判和漏判的情況。這需要增加程序的數(shù)據(jù)處理能力和訓練算法,更換精度更高的視覺相機,提高智能識別的準確性。
4.2 自主行走的穩(wěn)定性有待改善
盡管該茄子采摘機具備自主行走功能,但在實際運行中還是出現(xiàn)了偏離軌跡、撞到障礙物等問題。這需要改進控制算法和增加傳感器,提高茄子采摘機的自行走穩(wěn)定性。
4.3 采摘機末端手爪的靈活性有限
雖然該茄子采摘機能夠完成果實的采摘工作,但是末端手爪的靈活性還需要進一步提升。該茄子采摘機在采摘果實時,有時會損傷果實或誤判采摘的成熟度。改進茄子采摘機的末端手爪設(shè)計,可使其更加靈活和精準。
參考文獻:
[1]吳雙雙,楊根健,劉夢晨,等.面向番茄采摘機器人的視覺方案及實驗教學設(shè)計[J].實驗技術(shù)與管理,2024,41(7):169-175.
[2]張延軍,趙建鑫.基于多路神經(jīng)網(wǎng)絡(luò)的黃花菜關(guān)節(jié)點檢測算法研究[J].中國農(nóng)機化學報,2024,45(7):228-234.
[3]林桂潮,吳志銘,嚴茂森,等.基于機器視覺的多機械臂菠蘿采摘機器人設(shè)計與試驗[J].機電工程技術(shù),2023,52(10):141-144,154.
[4]劉力維.采摘機器人機械臂運動控制與目標抓取研究:基于嵌入式和機器視覺技術(shù)[J].農(nóng)機化研究,2024,46(4):68-72.
[5]李燕.基于機器視覺的橙果定位采摘方法與試驗[D].武漢:華中農(nóng)業(yè)大學,2023.
作者簡介:黃鑫(1993—),男,碩士,講師,研究方向:機電設(shè)備智能控制。
基金項目:陜西工業(yè)職業(yè)技術(shù)學院2023年院級科研計劃項目“基于機器視覺的移動機器人動態(tài)目標定位與跟蹤研究”(2023YKYB-013)。
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
