數組矩陣虛擬窗體算法在自動分揀系統設計中的應用
2014-02-18 09:29:02安裕強
物流技術 2014年11期
安裕強,陳 斌
(紅云紅河集團 物流中心,云南 昆明 650000)
1 引言
隨著市場經濟的不斷發展,社會需求開始呈現小批量、多批次的發展趨勢[1]。如何高效的完成產品的分揀配貨,在很大程度上決定了順應這種趨勢的能力。自動分揀系統作為物流系統的核心技術設備之一,是實現分揀配貨環節高效作業的重要技術手段。集成自動識別技術、傳感器技術、自動控制技術等先進計算機技術的自動分揀系統,可以有效的配合高度自動化的生產系統、倉儲系統,無縫連接產、存、銷子系統。高度自動化分揀系統,極大地減輕了工人的勞動強度,提高了分揀效率和準確性[2]。為此,本文介紹了一種基于數組矩陣虛擬窗體算法的自動分揀系統,通過控制核心在分揀設備上產生、移動若干虛擬窗體,并對其分配邏輯進行控制,實現對待分揀物料單元定位、跟蹤,完成精確、高效、高速的分揀作業。
2 自動分揀系統的組成
典型自動分揀系統主要包括控制核心單元、合流設備、分流設備、分揀格口四個部分。
控制核心單元是整個系統的中樞,通常使用可編程控制器(PLC)或工業計算機(IPC)作為控制核心,核心通過工業以太網與倉庫管理系統(WMS)等其他需要數據交換的系統進行通信。通過運行存儲在控制核心中的時序程序對設備運行、機構動作執行、網絡信息通訊等具體功能模塊進行監視和控制;合流設備將各上游通道送入的物料單元進行匯流,形成標準統一的物料流。物料單元在合流進入物料流的過程中,完成按分揀控制特征進行的必要的姿態調整;分流設備接收來自合流設備的物料流,通過自動識別分揀控制特征,驅動位于分揀格口的分揀執行機構動作,完成向分揀格口的分揀;分揀后的物料單元通過分揀格口進入下游處理環節。典型的自動分揀系統組成如圖1所示。
3 基于數組矩陣的虛擬窗體分揀控制策略
分揀設備是高速連續運行的設備,其本身不宜通過物理方式(如設置框、欄等),來控制合流和分流物料單元的具體位置,因此,本文提出一種基于數組矩陣的虛擬窗體的分揀控制策略,以實現自動分揀系統精準控制。
虛擬窗體是根據已知的設備物理條件,通過程序模擬產生的一系列用來控制被分揀物料在設備上位置的虛擬控制域。窗體的產生、移動、分配和定位控制策略,是分合流設備實現成功分揀的關鍵。
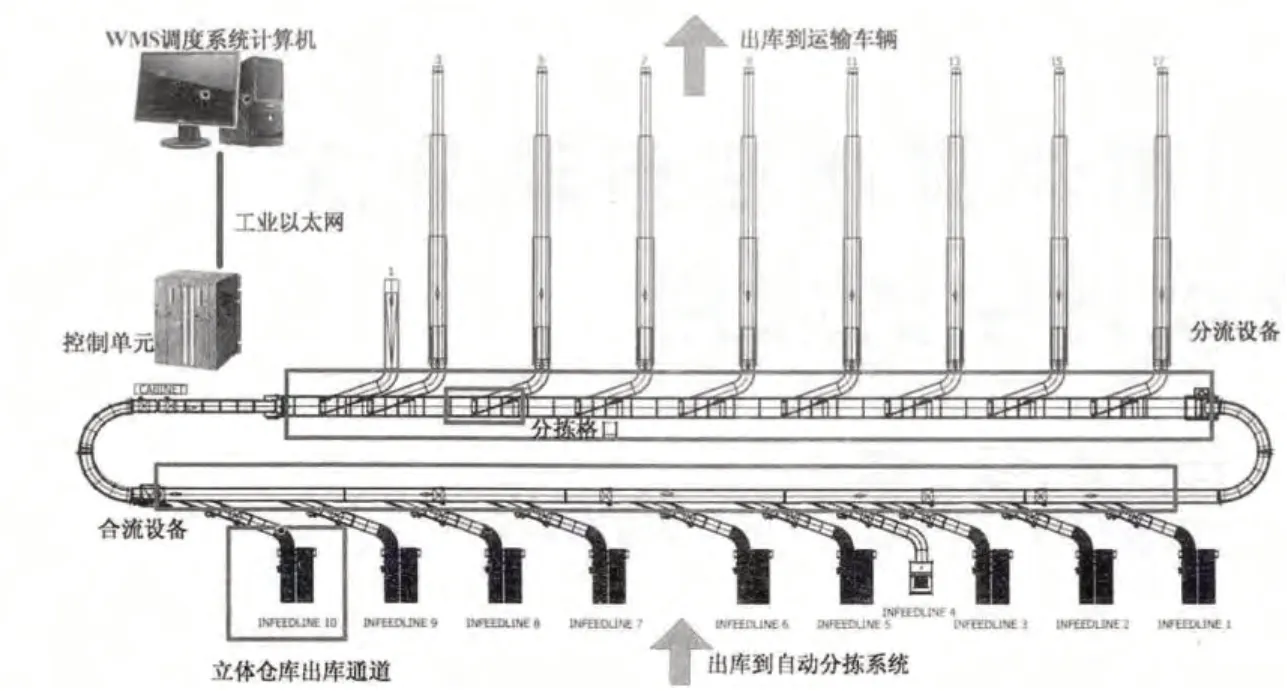
圖1 自動卷煙分揀系統組成圖
3.1 窗體的產生、移動控制策略
為了能夠充分利用分揀設備的物理尺寸,使分揀作業高效進行,同時又保證物料流流量處于合理范圍,使物料單元間的間距足以讓分合流機構完成動作,就必須合理控制虛擬窗體尺寸,在有限的設備空間內,盡可能連續的安排虛擬窗體。
設分合流設備總輸送長度為L,物料單元體積(高×長×寬)為v=h×l×w,分揀姿態為長邊指向輸送前進方向,在設備上可以容納窗體最大個數為N=個,考慮到設備機構動作間隙和物料間安全距離,需要對物料單元長邊變長和有效窗體長度進行修正,修正系數為a(1.5 ≤a≤2),即前后兩個物料單元的間隔為四分一的邊長。修正后的窗體長度為P=a×l,最大窗體數虛擬窗體、物料單元、設備尺寸間關系如圖2所示。
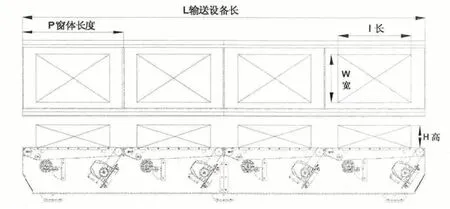
圖2 虛擬窗體、物料單元、設備尺寸關系
窗體的移動使用脈沖進行控制,設脈沖輪輪幅為n,直徑為D,故單脈沖經過的圓周距離為:
為了減少脈沖輪誤差累計的乘數效應造成的窗體移動位置走偏,采用設置多個脈沖輪同時采集脈沖,并對脈沖數據進行統計無偏處理。
3.2 窗體分配的策略
上游輸入通道等間隔部署在分合流設備的一側,考慮到效率均衡,必須對多虛擬窗體進行分組。因為如果不分組,沿輸送前進方向的遠端通道優先級始終低于近端通道,使得近端通道始終處于合流狀態,而遠端處于等待合流狀態。
為了保證在不同的作業模式下,設備都能順利運行,將最大窗體數平均分配到各出庫通道是較為有效的辦法。設出庫設備共有M個通道,每一個通道對應一個虛擬窗體組,并賦予每一組權重,當β1=β2=…=βM時,各通道合流作業獲得相同的優先級,每組中的虛擬窗體數相同,窗體個數為
3.3 虛擬窗體的數組矩陣
數組是一個單一數據類型對象的集合,集合中的每一個對象可以通過建立索引規則進行單獨訪問。通過將二維數組轉換成為對應的矩陣,就可以利用矩陣運算規則實現對數組的計算。每個通道有x個虛擬窗體,窗體按照輸送前進方向等距離分布在分揀設備上,通過通道號和單個窗體在各通道組中的序號,可以確定唯一的虛擬窗體,如:i通道對應有j個窗體,xij就是一個唯一確定的虛擬窗體。以通道為行、各通道中虛擬窗體序號為列,就形成另一個i×j的數組,數組中的每一個元素對應于一個虛擬窗體,這樣就建立了代表虛擬窗體的二維數組矩陣。通過矩陣加法進行脈沖累加計算,就能精確定位和跟蹤每一個窗體在分揀設備上的位置。
4 基于數組矩陣的虛擬窗體分揀控制程序實現
4.1 系統初始化流程
當自動分揀系統控制核心接到上層網絡下達的作業任務后,將控制變頻器產生斜坡信號,啟動輸送設備的驅動電機。當系統中所有電機完成啟動,并檢測轉速達到預設轉速后,系統獲取目標分揀物料單元的外形尺寸進行虛擬窗體初始化,確定窗體尺寸、數量和激活范圍(因為不是所有通道同時投入使用),初始虛擬窗體數組矩陣為,其 中,矩陣中各元素的初始值即為虛擬窗體在設備上的原點位置。矩陣初值隨脈沖信號的不斷觸發,進行矩陣加法更新。當矩陣加法進行到設定的最大值時,虛擬窗體已完成從起始點到起始點的一次循環,各脈沖輪統計修正偏差,開始下一個循環。
4.2 物流單元合流進入窗體的控制流程
當接到任務的i通道中有合流物料單元到達合流口時,會觸發一個合流請求信號,系統會在信號時點的虛擬窗體數組矩陣中i行(i的數值由通道編號決定)中進行順序搜索,以獲取該行中距離合流口最近的一個空閑虛擬窗體j。確定合流窗體xij的下標后,會生產一個基于xij位置的列向量(0,0,…,xij,…,0,0)T,通過和窗體數組對應i行進行矩陣乘法,確定當前窗體位置到合流口的距離。當窗體移動到合流口后,觸發合流允許信號,啟動合流設備動作,將物料送入虛擬窗體中,完成合流,并更新虛擬窗體狀態。
4.3 輸送機上的狀態校驗流程
完成合流的物料還需要輸送一段距離才能到達分揀格口,在這個過程中可能會出現物料因外力離開虛擬窗體和輸送設備的情況,因此需要對實物狀態進行校驗,以確定窗體實時狀態,提高設備運行可靠性。虛擬窗體中的實物校驗通過安裝在合流設備上的光電傳感器實現,當虛擬窗體連續通過兩個校驗位置而沒有觸發信號時,則認為物料丟失,系統將更新當前窗體的狀態,并允許其接受下一次合流申請。當卷煙觸發部署在合流口和分揀格口間所有的光電傳感器,則認為虛擬窗體狀態正常。
4.4 分流格口的確定流程
載有物料單元的虛擬窗體經過狀態校驗后,通過分揀特征識別,最終確定分揀格口。經過安裝在分揀設備上的自動識別設備后,設備識別RFID、條形碼等特征,匹配已設定的接受該類物料的分揀格口。確定目標分揀格口后,計算確定當前位置到分揀格口的脈沖個數,并通過虛擬窗體數組矩陣乘法和脈沖加法,完成脈沖累計。
4.5 物料分揀離開窗體的控制流程
當接到載有合流物料的窗體按照計算的數組矩陣結果到達分揀格口時,系統會產生分揀信號,啟動分流設備動作,將物料送離虛擬窗體,完成分揀。分揀完成后,虛擬窗體狀態會自動更新,并允許接受下一次合流申請。
5 結語
基于數組矩陣的虛擬窗體算法控制的自動分揀系統,可以靈活的根據物料單元的不同外形、尺寸,合、分流設備的不同設計機械結構進行調整,擴大或縮小虛擬窗體的尺寸,使得分揀系統具有較高的柔性,還可以在設備機構合理的作業能力內,通過提高脈沖頻率加快分揀作業速度。此外,由于所有虛擬窗體均由系統自動生成,因此通過整合數據庫,虛擬窗體賦予唯一ID號,就能實現任務日志、物流單元、分揀信息等多重數據綁定整合,使得系統具備良好的通用性,還可以采用開放系統數據庫接口的辦法,對系統分揀的物料信息進行封裝,實現網絡共享。這些都為將來現代物流物聯網的建設做出了有益的幫助和探索。
[1]賈錦珠.物流邁入自動分揀和輸送系統時代[J].中國儲運, 2008,(6):95-96.
[2]范啟印,馬駿騎,冉文學,干敏耀,劉海昌.虛擬視窗算法在成品煙自動分揀控制中的應用[J].昆明理工大學學報(理工版), 2004,(2):65-68.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00