飛機縱向運動自修復控制律設計
2014-12-25 09:21:04姜久龍王文星李學仁杜軍
飛行力學 2014年5期
姜久龍,王文星,李學仁,杜軍
(1.空軍工程大學航空航天工程學院,陜西西安710038;2.中國飛行試驗研究院飛機所,陜西西安710089)
0 引言
飛機舵面故障包括舵面損傷、卡死、飽和以及松浮等[1],這些故障會導致飛機氣動力和舵面控制效能發生變化,從而影響飛機的控制效能,造成飛機動態特性變壞,甚至失去控制。自修復飛行控制是解決該類問題的有效途徑。
文獻[2-3]提出設計控制重構模塊補償常規飛行控制的方法,對舵面故障時進行控制律重構。當舵面發生故障時,文獻[4-5]通過自適應控制,調整飛機跟蹤參考模型的輸出,從而完成故障情況下的飛行控制。這些方法均取得了較好的控制效果,但在設計過程中面臨著重構模塊設計增加飛行控制復雜度、自適應參考模型是否準確等問題。
本文提出從舵面能量重構和控制器兩方面著手,通過舵面重構能量補償和設計精度高、魯棒性好、對外界干擾小、能自適應調節控制參數的控制器實現飛機舵面故障時的穩定控制。
1 飛機縱向舵面失效運動模型
1.1 飛機舵面失效運動模型
平尾故障主要影響控制力矩,對升力、阻力影響較小。為了簡化分析,假設在平尾故障時,其升力阻力不發生變化。
含舵面故障的推力矢量飛機縱向運動非線性數學模型為[6-7]:
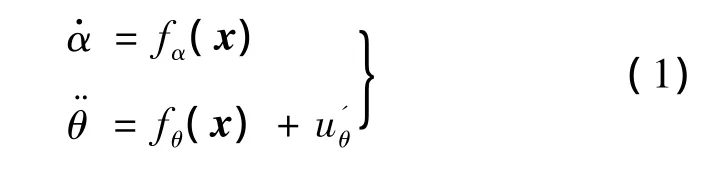
其中:
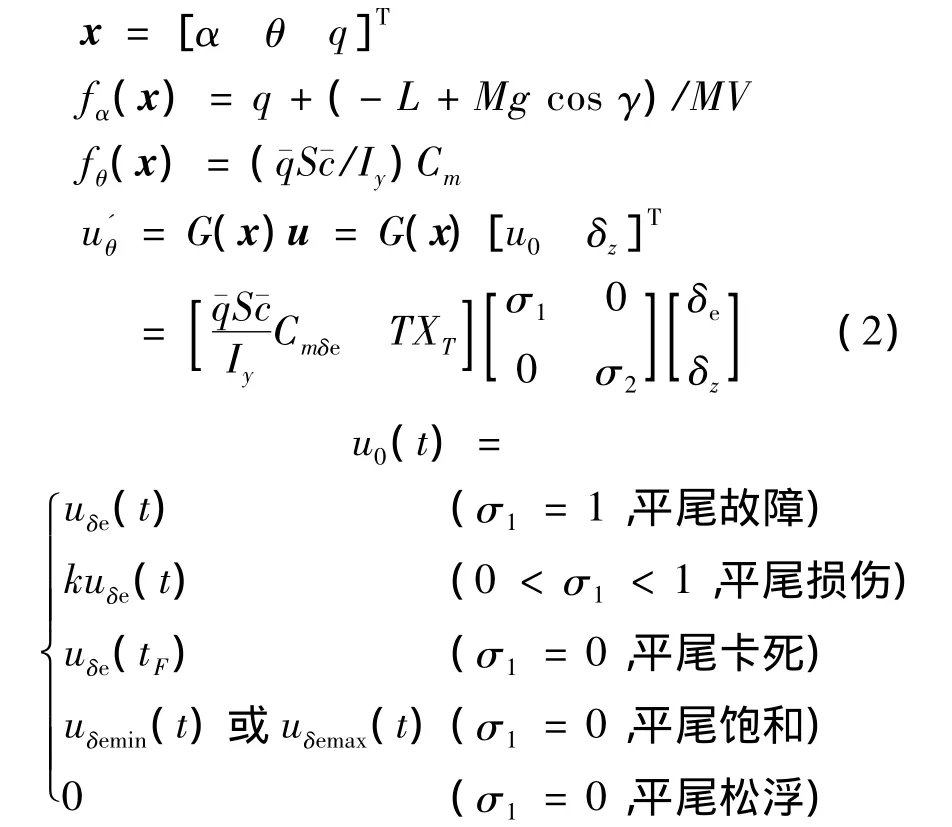
式中:狀態變量 α,θ,q,分別為迎角、俯仰角和俯仰角速度;Tx,Tz分別為發動機推力在飛機機體坐標系中x軸和z軸的分量;δe,δz分別為平尾和縱向推力矢量偏角。σ1表示舵面是否參與控制:當σ1=0時,如平尾卡死、飽和以及松浮等,平尾退出飛行控制操作,其狀態保持故障狀態;當0<σ1<1時,平尾損傷可以看作平尾部分面積損失,平尾保持基本功能,參與控制,但其控制力矩將隨平尾面積損失下降。k∈[0,1]表示平尾的損傷程度,設定控制力矩與損傷程度成正比,則平尾控制量則為未發生故障uδe的 k 倍。
1.2 飛機舵面控制重構
飛機平尾故障時,可能導致不能提供足夠的控制力矩,必須重構舵面控制以提供額外的控制力矩。具有推力矢量的飛機可以利用發動機尾噴管的偏轉來提供額外的控制力矩,因此推力矢量一定程度上可以看作平尾的余度備份。當平尾故障或受損時控制舵面重構,推力矢量舵面提供控制力矩,彌補因平尾故障或受損引起的控制力矩損失。
鏈式遞增舵面分配算法以平尾舵面為主舵面全時間工作,推力矢量為輔助舵面。正常飛行時只使用氣動舵面保證飛機的可操縱性;當飛機平尾故障時,平尾舵面達到最大允許偏轉角或偏轉速度仍不足以提供控制所需的力矩,則控制力矩分配到推力矢量舵面。
2 飛機縱向舵面失效控制律設計
2.1 飛機縱向控制設計思路
在分數階自抗擾控制器設計中,將角回路和速度回路之間的耦合項當作模型的擾動,通過控制器中的擴張觀測器估計回路的擾動量。擴張觀測器觀測(ESO)的擾動量包括回路中的耦合項和外擾。利用估計的擾動量對系統進行動態補償使角回路解耦為獨立回路,再通過分數階控制器的非線性配置得到回路理想的動態和穩態性能。
2.2 分數階自抗擾控制器設計
飛機縱向運動控制器主要由跟蹤微分器(TD)、擴張觀測器和分數階非線性控制器三部分組成。
跟蹤微分器表達式為:
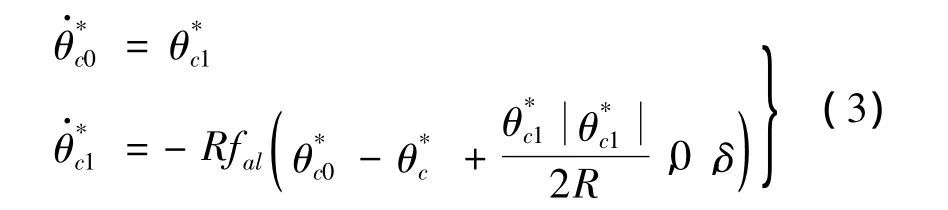
其中:
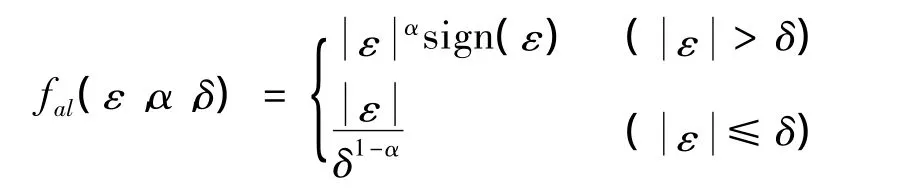
考慮俯仰角控制回路有兩次積分作用,按照自抗擾控制器設計規則,該回路可看作二階系統。要估計其狀態變量和擾動量,需設計三階擴張觀測器,其表達式為:
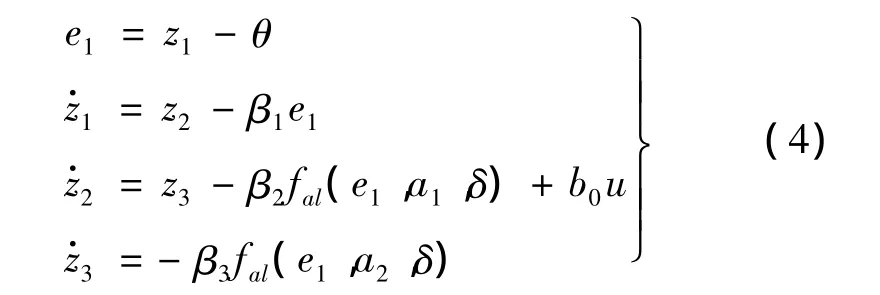
擴張觀測器的主要作用是對系統的狀態進行估計輸出,其性能主要由 β1,β2,β3決定。一般情況下,β1,β2,β3依次相差一個到兩個級數便能得到很好的估計效果。
分數階非線性控制器是控制器的傳遞函數,其模型為[8]:

式中:Kp,Ki,Kd為控制器參數;λ,μ 為分數階階次。
分數階微分項采用改進的Oustaloup濾波器,其表達式為:

2.3 分數階自抗擾控制器自適應控制
考慮到舵面重構使飛機能夠在平尾損傷的情況下,通過將控制力矩分配到推力矢量舵面達到控制力矩補償的目的。但是,當飛機系統參數和結構發生較大變化時,控制器的控制效能將不能滿足動態要求,必須動態調節控制器的參數,使控制器能夠適應目前的飛行狀態,達到良好的動態控制效果。
當系統控制穩定后,影響分數階自抗擾控制器控制誤差的主要參數有Kp,Ki,Kd。在系統初始響應時間內,為了保證系統有較快的響應速度,Kp的初始段應較大;在誤差逐漸減小時,Kp也應隨之減小,使得系統慣性逐漸減弱,不至于產生大的超調量。Ki積分信號的作用在于消除穩態誤差,為了防止超調和產生振蕩,當誤差信號較大時Ki增益要小;而當誤差信號較小時,則要增大Ki增益。在系統初始響應時間內,Kd的取值應該逐漸增大,可以在不影響速度的情況下,抑制超調量的產生;當系統產生超調量時,Kd增加幅度要大,使之更快的消除增益。由上述規律可以得到調節參數隨誤差的變化曲線如圖1所示。
根據圖1所示,非線性曲線描述可由文獻[9]所提的sech函數給出:

式中:c1為Kp的變化速率;a1,b1為調節參數。

式中:c2為Ki的變化速率;a2,b2為調節參數。

式中:c3為的變化速率;d3為e(t)的變化速率;a3,b3為調節參數。
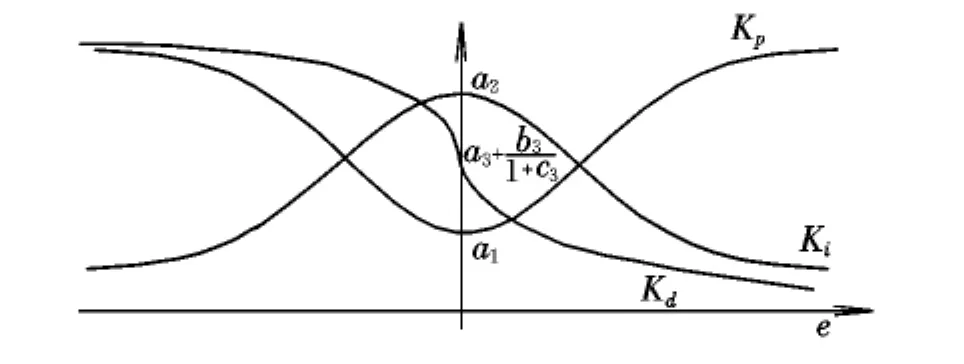
圖 1 Kp,Ki,Kd 隨誤差變化曲線Fig.1 Changes of Kp,Ki,K d with error
在分數階自抗擾控制器中,微分跟蹤器可以提供信號的過渡過程和變化律,而擴張觀測器估計的狀態中有被控對象的變化率,兩者的差即為誤差的變化率,避免了在實際工程中微分環節難以實現的問題,有利于工程實踐。分數階自抗擾控制器參數自適應調節控制結構如圖2所示。
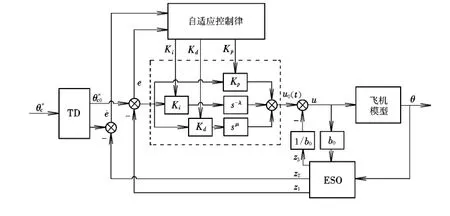
圖2 分數階自抗擾控制器參數自適應調節控制框圖Fig.2 Parameter self-adaptive adjustment control of fractional active disturbance rejection controller
3 仿真分析
仿真初始條件設置為:H=2 000 m,V=250 m/s,初始水平舵偏量為δe=2.3°,推力矢量偏角為δz=0°,發動機推力在仿真中固定為100 kN;微分跟蹤器:R=100,δ=0.1;擴張觀測器:β1=75,β2=500,β3=1 000,a1=a2=a3=0.5,δ1= δ2= δ3=0.002 5。
由于分數階自抗擾控制器在參數固定的情況下具有很好的魯棒性,因此在參數自適應控制律設計中,設計自適應控制律在本文固定參數基礎上進行調節。設置Kp的變化范圍為[65,105],Ki變化范圍為[0,2.3],Kd變化范圍為[55,75]。因此得到各參數自適應律的整定參數為:Kp:a1=65,b1=40,c1=10;Ki:a2=2.3,c2=10;Kd:a3=55,b3=20,c3=1,d3=100。
仿真輸入信號為20°的方波信號,舵面故障分別按照平尾損傷0%和80%進行仿真,得到舵面故障情況下飛機的動態響應,檢驗分數階自抗擾控制器的控制效果。仿真結果如圖3~圖7所示。

圖3 平尾損傷0%時控制參數變化曲線Fig.3 Change of control parameters with 0%tail actuator damage

圖4 平尾損傷0%時飛機狀態和舵面動態過程Fig.4 Aircraft state and actuator dynamic progress with 0%tail actuator damage

圖5 平尾損傷80%時控制參數變化曲線Fig.5 Change of control parameters with 80%tail actuator damage
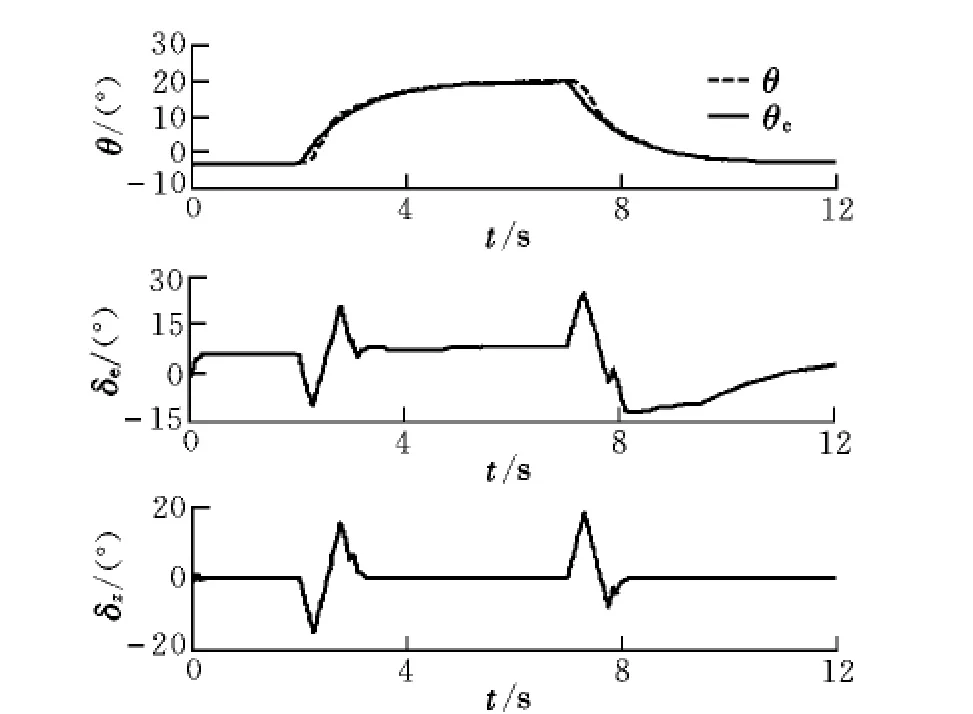
圖6 平尾損傷80%時飛機狀態和舵面動態過程Fig.6 Aircraft state and actuator dynamic progress with 80%tail actuator damage

圖7 平尾損傷80%時控制誤差對比Fig.7 Comparison of controll errors with 80%tail actutor damage
仿真結果表明:當舵面正常和損傷不大時,由于分數階自抗擾控制器具有良好的魯棒性,可以很好地完成飛行控制,不需控制器調節參數即可實現飛機舵面自修復控制。當舵面損傷大于80%時,控制效果變差,采用參數自適應變化后控制效果得到改善。為此對比在舵面大面積損傷時,采用固定參數和參數自適應方式控制效果。由圖7可知,當舵面損失80%時,采用自適應控制律進行參數調整后,控制性能得到明顯改善,誤差振蕩的情況減少,超調很小,獲得了良好的控制效果。
4 結束語
飛機舵面失效會導致飛機構型發生變化,為了達到穩定控制的目的,引入推力矢量將因平尾損失的力矩分配到推力矢量舵面上,實現舵面損失而控制量不損失,同時高魯棒性的自適應參數調節控制器的應用較好地解決了控制模型結構參數變化時的穩定控制。該方法的優勢在于:估計和補償由于平尾損失導致的控制模型擾動,無需準確的失效模型;針對控制結果的非線性函數自適應調節控制器參數簡單可靠、便于工程實現。但也應該注意到,舵面失效也會影響氣動力的變化,考慮氣動變化情況下的舵面重構及耦合控制將需要進一步研究。
[1] 張明濤,安錦文.控制舵面故障下的飛機運動建模與重構控制能力分析及設計[J].信息與控制,2010,39(5):588-595.
[2] Boskovic JD,Prasanth R,Mehra R K.Retrofit fault-tolerant flight control design under control effector damage[J].Journal of Guidance,Control,and Dynamic,2007,30(3):703-712.
[3] Paga A B,Meloney DE.Flight testing of a retrofit reconfigurable control law architecture using F/A-18C[R].AIAA-2006-6052,2006.
[4] 宋述杰,蘇浩秦,鄧建華.具有自修復功能間接自適應飛行控制系統研究[J].飛行力學,2007,24(3):40-44.
[5] 劉小雄,章衛國,武燕,等.基于直接自適應控制的重構飛控系統研究[J].控制與決策,2007,22(4):440-444.
[6] 熊治國,孫秀霞,尹暉,等.自抗擾控制器的飛機縱向運動控制律設計[J].電機與控制學報,2006,10(2):420-423.
[7] 王峰,孫秀霞,王洪亮.基于自抗擾控制器的飛機縱向自修復飛行仿真[J].系統仿真學報,2009,21(4):1020-1023.
[8] Han Jing-qing.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-906.
[9] 肖永利,張琛.位置伺服系統的一類非線性PID調節器設計[J].電氣自動化,2000,22(1):20-22.
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
直升機技術(2021年4期)2022-01-12 13:18:12
汽車維修與保養(2019年7期)2020-01-06 03:30:42
當代陜西(2019年11期)2019-06-24 03:40:28
民用飛機設計與研究(2019年4期)2019-05-21 07:21:30
大飛機(2018年1期)2018-05-14 15:59:08
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
航空學報(2015年4期)2015-05-07 06:43:33
