基于SolidWorks 的三菱工業機器人虛擬工作站構建
2015-01-23 02:52:38□隋欣
產業與科技論壇 2015年23期
□隋 欣
一、引言
自從20世紀60 代世界上誕生第一臺工業機器人起,工業機器人就以其獨特的魅力逐步征服人類,它們越來越多地活躍在國民生活中的各個層面。截止到2012年,全世界每一萬名工人中,機器人的裝備量世界最多的韓國可以達到347 臺,日本達到339 臺,世界平均水平是58 臺,而我國僅為23 臺。隨著中國人口老齡化的到來,根據相關統計到2050年,中國65 歲以上老人數量將達到總人口的三分之一,適齡工作人口對重復的枯燥的勞動越來越沒有興趣,勞動力資源的短缺不可避免將會在中國出現。被稱作中國版的工業4.0 計劃《中國制造2025》中強調中國制造業要完成從“制造”到“智造”的轉型。因此在我國大量引進機器人完成相關產業的升級換代變得勢在必行。工業機器人的成本較高,一臺的成本在20 萬元左右,因此教育領域不適合大量引進機器人供學生人手一臺實際操作學習,通過建立工業機器人的虛擬工作站采用虛擬真實機器人工作站的形式可以滿足絕大多數工業機器人指令的學習使用。本文基于教學目的,通過SolidWorks 和作為其插件的MelfaWorks 建立了三菱工業機器人RV -3SD 的虛擬工作站,并且通過使用RT ToolBox 軟件編程在所建立的虛擬工作站中完成了3* 4 形式的碼垛作業,驗證了所建立的虛擬工作站完全可以滿足教學使用要求。
二、建立虛擬工作站
(一)系統構成。
1.裝配機器人。通過Melfaworks 導入三菱RV -3SD 型機器人本體,這是一個額定載荷為3 公斤的垂直多關節機器人,廣泛應用在機械、電子等裝配領域中。它由腰部、肩部、上臂、肘部、前臂、手腕構成,共有6 個自由度,通過機械臂的前后、左右以及轉動等運動配合安裝上的抓手可以完成三維空間內的物體的抓取、搬運等操作。
2.基座。通過SolidWorks 導入一個圓柱形基座,并在基座上建立坐標系,坐標系位于圓形表面中心,并確保Z 軸坐標朝向外側。對基座的文件命名規則上沒有要求,它的主要作用是固定機器人本體,在工廠中機器人本體都是通過基座固定在地面上。
3.抓手。虛擬工作站的抓手也是通過SolidWorks 導入的。真實的抓手有氣動和電動兩種形式,氣動形式的抓手相對簡單,價格也比較便宜,應用最為廣泛。虛擬抓手沒有氣動和電動之分,但是為了裝配和抓取物件的需要,在它的上面需要建立兩個坐標系,分別針對裝配機器人手腕和待抓取的物件。為了使Melfaworks 能夠識別SolidWorks 建立的抓手文件,虛擬抓手文件名應遵循xx_Hand 形式。
4.工件。由于最終要完成3* 4 的碼垛作業,因此需要通過SolidWorks 導入12 個外觀完全一樣的待加工物件。在工件上,應建立一個針對抓手抓取部位的坐標系,確保坐標系的Z 軸朝向工件內部,否則抓手抓取時會反向抓取物件,虛擬工件名稱應遵循xx_work,否則將不被識別。
5.傳送帶、工作臺和托盤。傳送帶、工作臺和托盤都是對整個虛擬工作站項目的待操作物件起到支撐作用,對于它的命名規則沒有要求,由于它們也不需要和機器人本體進行裝配,因此也不需要在其上建立坐標系。根據項目要求需要建立一條傳送帶臺,用來模擬傳送過來的代加工物件,還有一個工作臺用來安放托盤。
(二)裝配。將已經建立好的機器人基座、抓手、待操作工件、傳送帶、工作臺和托盤裝配到一個工作站中,并調整好相對位置,調整完畢的虛擬工作站如圖1 所示,12 個物件重疊在一起,此處模擬傳送帶每次傳送一個待加工物件,并且每次傳送過來的工件停在傳送帶的相同位置。
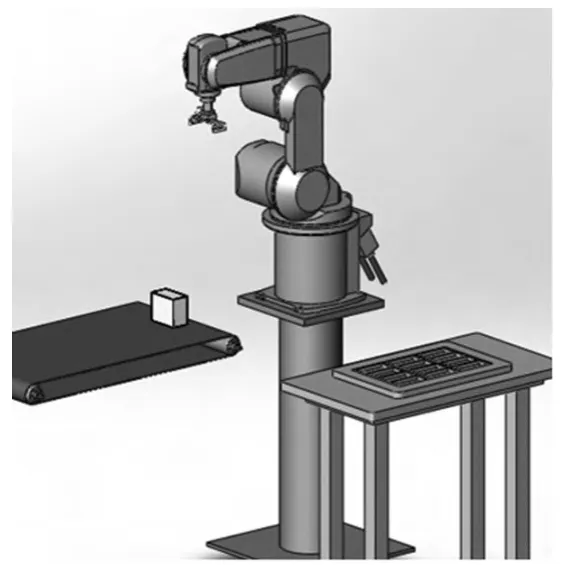
圖1 虛擬工作站
三、碼垛的實現
(一)碼垛定義。在現代工廠中,都離不開自動化立體倉庫的使用。自動化立體倉庫的搬運作業,又離不開自動化控制的碼垛機器人的使用。碼垛指令的功能是使待搬運物件從一個位置按照一定的軌跡搬運到所定義的托盤的過程。它的定義如下:
Def Plt <托盤號碼>,<起點>,<終點A >,<終點B >,[<對角點>],<個數A >,<個數B >,<托盤模板>
其中:
<托盤號碼>:選擇已設定的托盤號碼(只有1 ~8 的常數)
<起點>:托盤的起點
<終點A >:托盤一邊的終點
<終點B >:托盤另一邊的終點
<個數A >:起點到終點A 之間的待搬運物件個數
<個數B >:起點到終點B 之間的待搬運物件個數
<托盤模板>:一般設定為1,表示Z 字型搬運,姿勢等分割。
由于大多數倉庫使用的托盤形狀均為矩形,因此本文也完成對矩形托盤Z 字型3* 4 形式的碼垛作業,所以最終碼垛托盤的最終定義形式如下:
Def Plt 1,P10,P11,P12,P13,3,4,1
其中P10 代表圖中碼垛托盤的左上方的點,P11 代表碼垛托盤左下方的點,P12 代表碼垛托盤的右上方的點,P13 代表碼垛托盤右下方的點。
(二)編寫程序。通過RT Toolbox 編寫程序,按照圖2 順序進行。為了對機器人進行軌跡規劃,需要校驗以下行進過程中的關鍵點,數值如圖3 所示,其中P0 表示機器人的退避點,P1表示待抓取物件在傳送帶的位置,P10、P11、P12、P13 表示碼盤的四個頂點的位置,P100 是碼盤上1#物件放置位置。

圖2 程序編寫流程圖

圖3 軌跡關鍵點校驗
(三)啟動虛擬工作站中的機器人系統并開始碼垛作業。得到結果如圖4 所示。

圖4 碼垛作業結果
四、結語
通過SolidWorks、MelfaWorks 以及RT ToolBox 軟件的結合使用創建的機器人虛擬工作站可以滿足日常教學使用,在最大程度上模擬了真實的機器人控制系統。在教學資源不足或者成本巨大的情況下,通過虛擬仿真的方法可以較小的代價完成教學任務。并且,在虛擬環境下進行實驗結果的仿真,然后移植到真實的操作環境中進一步調試也符合時代主流。
[1]李云江.機器人概論[M].北京:機械工業出版社,2012
[2]吳振彪,王正家.工業機器人[M].武漢:華中科技大學出版社,2006
[3]吳廣順,凌雷,方索香. PLC 在搬運機器人系統中的應用[J].機床與液壓,2006,2:188 ~190
