二階非線性不確定系統(tǒng)全局高速非奇異終端滑模控制
2015-03-14 10:09:45張鳳寧集寧師范學(xué)院物理系內(nèi)蒙古烏蘭察布012000
赤峰學(xué)院學(xué)報·自然科學(xué)版 2015年17期
張鳳寧(集寧師范學(xué)院 物理系,內(nèi)蒙古 烏蘭察布 012000)
二階非線性不確定系統(tǒng)全局高速非奇異終端滑模控制
張鳳寧
(集寧師范學(xué)院物理系,內(nèi)蒙古烏蘭察布012000)
摘要:終端滑模控制具有有限時間收斂、快速收斂、穩(wěn)態(tài)精度高等優(yōu)點(diǎn),特別適用于快速、高精度控制,并在電機(jī)控制、飛行器控制等眾多領(lǐng)域具有重要的應(yīng)用價值.本文針對二階非線性不確定系統(tǒng)有限時間魯棒控制問題,為了提高終端滑模控制的控制性能,提出全局高速非奇異終端滑模及相應(yīng)的滑模控制策略,并將新的滑模控制策略應(yīng)用于二階非線性不確定系統(tǒng).所提出的全局高速非奇異終端滑模不僅具有非奇異快速終端滑模所不具備的全局高速收斂特性,而且可以提供全局非奇異性.
關(guān)鍵詞:全局高速非奇異終端滑模;有限時間穩(wěn)定;魯棒控制
1 引言
隨著我國現(xiàn)代化建設(shè)蓬勃發(fā)展,現(xiàn)代工業(yè)、環(huán)境控制乃至航空航天、國防工程,各行各業(yè)都越來越迫切需要高性能控制方法來實(shí)現(xiàn)更精確、更快速、更可靠的控制.終端滑模控制以其動態(tài)響應(yīng)快、有限時間收斂、控制精度高、魯棒性強(qiáng)等優(yōu)點(diǎn),在電機(jī)控制、機(jī)器人控制、衛(wèi)星姿態(tài)控制等領(lǐng)域具有廣泛的應(yīng)用價值[1~4].非奇異快速終端滑模控制當(dāng)系統(tǒng)狀態(tài)遠(yuǎn)離原點(diǎn)時收斂速度快,且不具有奇異性[4].本文針對二階非線性不確定系統(tǒng)控制問題,設(shè)計(jì)了全局高速非奇異終端滑模控制器.全局高速非奇異終端滑模不僅具有非奇異快速終端滑模所不具備的全局高速收斂特性,并且可以提供全局非奇異性.
2 全局高速非奇異終端滑模控制器設(shè)計(jì)
二階非線性不確定系統(tǒng)的數(shù)學(xué)模型為:

其中,x(t)=(x1(t),x2(t))T∈R2為系統(tǒng)狀態(tài),f1(x(t))、f2(x(t))和b (x(t))為系統(tǒng)狀態(tài)的光滑函數(shù),u(t)是控制量,d(t,x(t))代表不確定因素.

全局高速非奇異終端滑模控制器設(shè)計(jì)為:

其中,
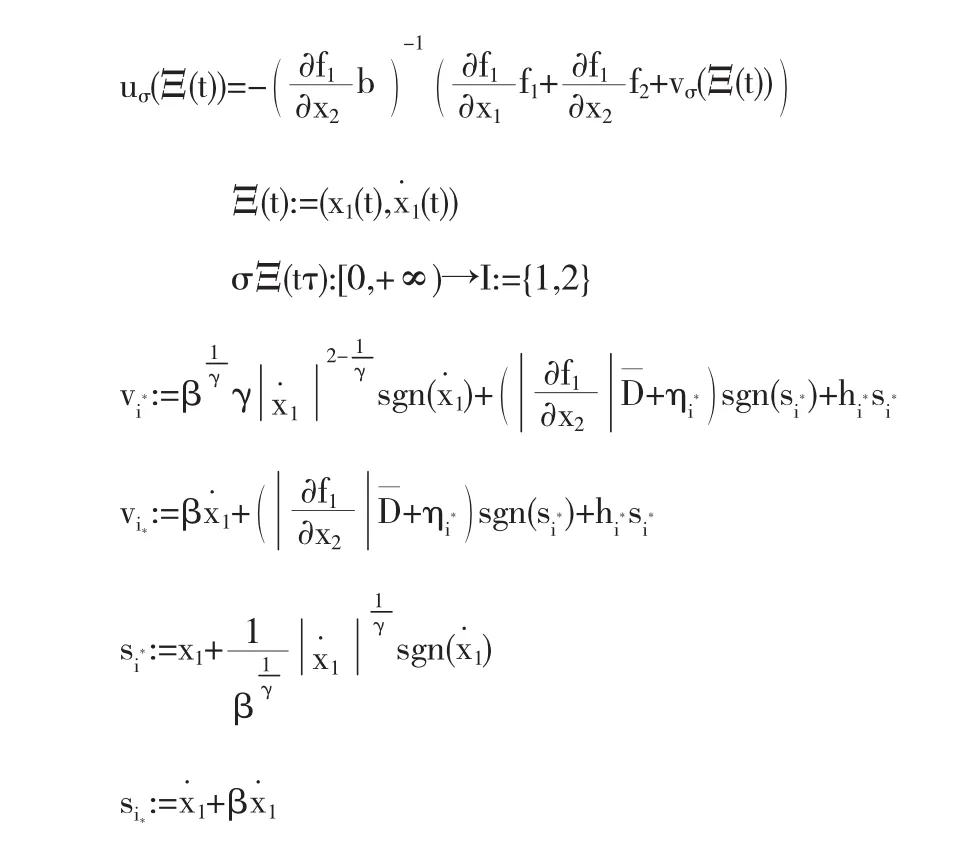
γ∈(0,5,1),i*=1,i*=2,β、ηi和hi屬于R+,i=1,2.
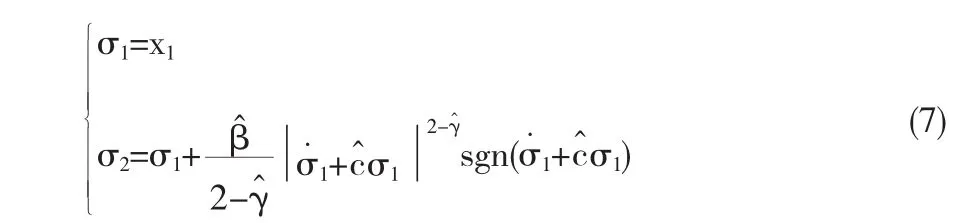
全局高速非奇異終端滑模定義為:

全局高速非奇異終端滑模控制及全局高速非奇異終端滑模的調(diào)度策略為:
如果(Ξ(t))∈Ξi,則σ(Ξ(tτ))=i,其中i=1,2.
3 穩(wěn)定性和收斂性分析
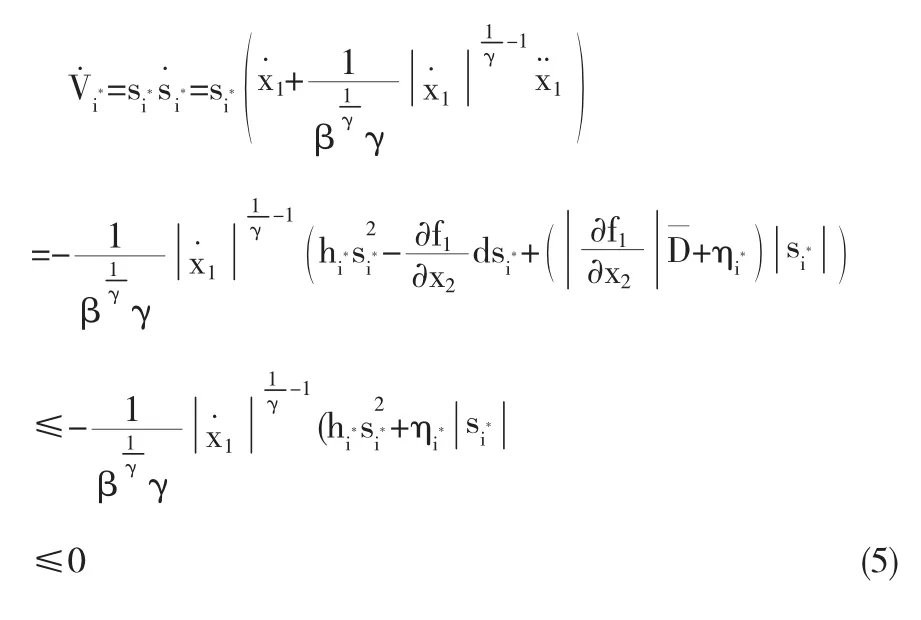
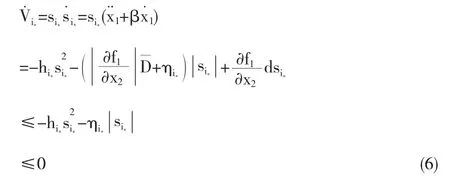
對于Ξ(t)∈Ξi,考慮李亞普諾夫函數(shù)

其中i=1,2.由(4)可得
定義tR為系統(tǒng)狀態(tài)到達(dá)滑模的時間,tS為系統(tǒng)狀態(tài)到達(dá)滑模后沿滑模收斂到原點(diǎn)所用的時間.當(dāng)系統(tǒng)狀態(tài)到達(dá)全局高速非奇異終端滑模流形sG=0時,有x.1=-β|x1|γsgn(x1)或x.1=-βx1.對(3)積分,可得:
因此,系統(tǒng)狀態(tài)在有限時間內(nèi)到達(dá)全局高速非奇異終端滑模流形,并在有限時間內(nèi)延全局高速非奇異終端滑模流形收斂到原點(diǎn).
4 性能分析
非奇異快速終端滑模為:

其中,αNF=c^>0,βNF=(2-γ^)/β^)1/(2-γ^)>0.
如果系統(tǒng)狀態(tài)到達(dá)滑模流形,且β=αNF+βNF,則當(dāng)|x1|∈(1,+∞)時,有
|-βx1|=-|αNFx1-βNFx1|
>|-αNFx1-βNF|x1|γNFsgn(x1)|
當(dāng)|x1|∈(0,1),γ=γNF時,有
|-β|x1|γsgn(x1)|=|-αNF|x1|γsgn(x1)-βNF|x1|γsgn(x1)|
>|-αNFx1-βNF|x1|γNFsgn(x1)|
因此,所提出的方法具有高速收斂特性.
因?yàn)楫?dāng)x(t)∈Ξ1時,γ>0.5,故本文方法不具備奇異性.
5 結(jié)論
針對二階非線性不確定系統(tǒng)控制問題,為了提高終端滑模控制性能,提出了全局高速非奇異終端滑模控制器.該方法提高了全局收斂速度,且不具有奇異性.
參考文獻(xiàn):
〔1〕Z. Man,A. P. Paplinski,H. R. Wu. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators [J]. IEEE Transactions on Automatic Control,1994,39(12):2464-2469.
〔2〕Y. Feng,X. Yu,Z. Man. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica,2002,38(12):2159-2167.
〔3〕X. Yu,Z. Man. Fast terminal sliding -mode control design for nonlinear dynamical systems [J]. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,2002,49(2):261-264.
〔4〕H. Li,L. Dou,Z. Su. Adaptive nonsingular fast terminal sliding mode control for electromechanical actuator [J]. International Journal of Systems Science,2013,44(3):401-415.
基金項(xiàng)目:內(nèi)蒙古自治區(qū)高等學(xué)校科學(xué)技術(shù)研究一般項(xiàng)目(NJZY13279)
中圖分類號:TP242
文獻(xiàn)標(biāo)識碼:A
文章編號:1673-260X(2015)09-0014-02
 赤峰學(xué)院學(xué)報·自然科學(xué)版2015年17期
赤峰學(xué)院學(xué)報·自然科學(xué)版2015年17期
- 赤峰學(xué)院學(xué)報·自然科學(xué)版的其它文章
- 《工程估價》課程特色教學(xué)模式探索——以“項(xiàng)目導(dǎo)向+任務(wù)驅(qū)動”教學(xué)法為例
- 多媒體課件教學(xué)與傳統(tǒng)圖學(xué)課程教學(xué)的比較
- 采購與倉儲實(shí)訓(xùn)教學(xué)系統(tǒng)的構(gòu)建與實(shí)現(xiàn)探究
- 合作學(xué)習(xí)在健美操教學(xué)中的實(shí)驗(yàn)研究
- 安慶市青少年羽毛球培訓(xùn)班現(xiàn)狀調(diào)查與分析
- 安徽省民辦本科院校大學(xué)生參與排球運(yùn)動的現(xiàn)狀及影響因素分析