尾槳轉速對旋翼轉速優化直升機操穩特性的影響
2015-03-15 08:58:12徐明李建波韓東
飛行力學 2015年1期
關鍵詞:優化
徐明, 李建波, 韓東
(南京航空航天大學 直升機旋翼動力學國家級重點實驗室, 江蘇 南京 210016)
尾槳轉速對旋翼轉速優化直升機操穩特性的影響
徐明, 李建波, 韓東
(南京航空航天大學 直升機旋翼動力學國家級重點實驗室, 江蘇 南京 210016)
基于狀態空間法建立了直升機的全量方程,通過計算直升機對航向操縱的脈沖響應及橫向穩定性特征根,分析了兩種尾槳轉速方案對旋翼轉速優化直升機的橫航向操穩特性的影響。計算結果表明,與尾槳轉速不隨旋翼轉速變化方案相比,雖然尾槳轉速隨旋翼轉速聯動時的直升機橫航向操縱性減小了一些,穩定性也輕微降低,但差異較小。因此綜合比較功率節約和結構減重的優勢,可以確定轉速聯動方案更適用于旋翼轉速優化直升機。
轉速優化; 尾槳轉速; 穩定性; 操縱性
0 引言
長航時無人直升機用于對任務區域實施長時間的偵察、監視、目標捕獲和對地攻擊等任務,可以不受人機環境的限制,既可以作為信息中繼或遠距離偵查攻擊一體化的飛行平臺,也可以與監控衛星相搭配,構建空天信息網絡,具有突出的綜合任務效能。美國A-160旋翼轉速優化直升機[1]可以根據飛行需要改變旋翼轉速,降低需用功率、提高飛行效能,還可以通過降低結構質量,增加燃油附帶量,使直升機長航時飛行成為可能。
與常規直升機相比,旋翼轉速優化直升機的旋翼轉速是可變的,并且最大變化范圍可達50%[2]。因此旋翼轉速優化直升機的尾槳轉速設計又增加了另外一種方案,即旋翼轉速優化直升機的尾槳轉速有兩種形式可供選擇:一種是與旋翼轉速等比例聯動,另外一種是保持尾槳轉速固定不變,不隨旋翼轉速變化而變化。從結構系統設計的角度而言,旋翼轉速優化直升機的尾槳轉速設計方案更傾向于尾槳轉速與旋翼轉速聯動。這是因為旋翼轉速優化直升機是以降低旋翼轉速為手段[3-4],減小需要功率與耗油率,以達到增加航時(航程)的目的[5];因此當尾槳轉速與旋翼轉速等比例降低時,不僅可以減少尾槳功率,還可以避免增加額外的減速機構。減小了直升機的結構質量,對增加直升機的最大飛行時間是有利的,但長航時無人直升機的遠距離、超長滯空時間的飛行特點,又給直升機的操縱性及穩定性提出了一定的要求;因此采用不同尾槳轉速設計方案是以不影響直升機穩定飛行為提前的。
尾槳是影響直升機橫航向操縱性及穩定性的主要氣動部件,選用不同尾槳轉速設計方案會影響直升機的操縱性及穩定性。本文根據葉素理論計算旋翼及尾槳氣動力,采用風洞吹風試驗數據計算機身及垂尾的氣動力,以狀態空間法建立了直升機的全量方程,采用小擾動假設將全量方程線性化;最后通過求解直升機的橫向運動方程,得到直升機的航向傳遞函數及橫向穩定性特征根,以此分析不同尾槳轉速方案下的直升機操縱性及穩定性。
1 計算方法與驗證
本文算例為美國A-160“蜂鳥”無人直升機。該直升機采用了無鉸式旋翼,槳葉揮舞剛度較大,且沒有平尾,因此本文建立的直升機飛行動力學模型包括旋翼、尾槳、機身及垂尾4個氣動部件,其基本參數為:最大起飛質量2 000 kg;旋翼槳葉4片,旋翼半徑5.5 m,弦長0.35 m;蹺蹺板式尾槳半徑1.05 m,弦長0.205 m;垂尾面積0.52 m2。
根據Pitt-Peters一階諧波動態入流理論,旋翼槳盤誘導速度諧波分量由如下一階微分方程確定:
(1)
式中:CT,CL,CM分別為旋翼拉力、俯仰和滾轉力矩系數;A,B為矩陣系數。
本文將無鉸式旋翼等效為槳根帶揮舞彈簧剛度的鉸接式旋翼[6],因此槳葉的縱橫向揮舞角仍然可以由如下二階微分方程確定:
(2)
根據槳葉剖面的迎角和馬赫數,結合翼型風洞試驗數據得到槳葉不同微段的升力系數和阻力系數,因此葉素的升力和阻力分別為:
(3)
對于旋翼構造軸系,該葉素產生的垂向力、切向力和徑向力分別為:
(4)
將葉素氣動力沿徑向和周向積分,求其平均值,再乘以槳葉片數,即可得到旋翼氣動力和力矩。
同樣采用葉素法計算尾槳的拉力和扭矩,其中入流采用均勻入流模型,同時根據風洞試驗數據計入機身、垂尾的氣動特性,而旋翼對機身、尾槳、垂尾的下洗系數由文獻[7]中的公式確定:
k=1.299+0.671χ-1.772χ2+0.351χ3
(5)
式中:χ為旋翼尾跡傾斜角。
為了檢驗所用模型的準確性,本文通過求解機體六自由度剛體平衡方程,計算得到起飛質量為1 500 kg,不同旋翼轉速下的總距值,并與文獻[8]中的計算值作比較,結果如圖1所示。雖然本文沒有考慮槳葉彈性變形造成兩者數值在前飛速度大于150 km/h后出現的偏差,但總體上較為接近,表明本文建立的氣動模型較為準確,可用于旋翼轉速優化直升機飛行動力學特征分析。
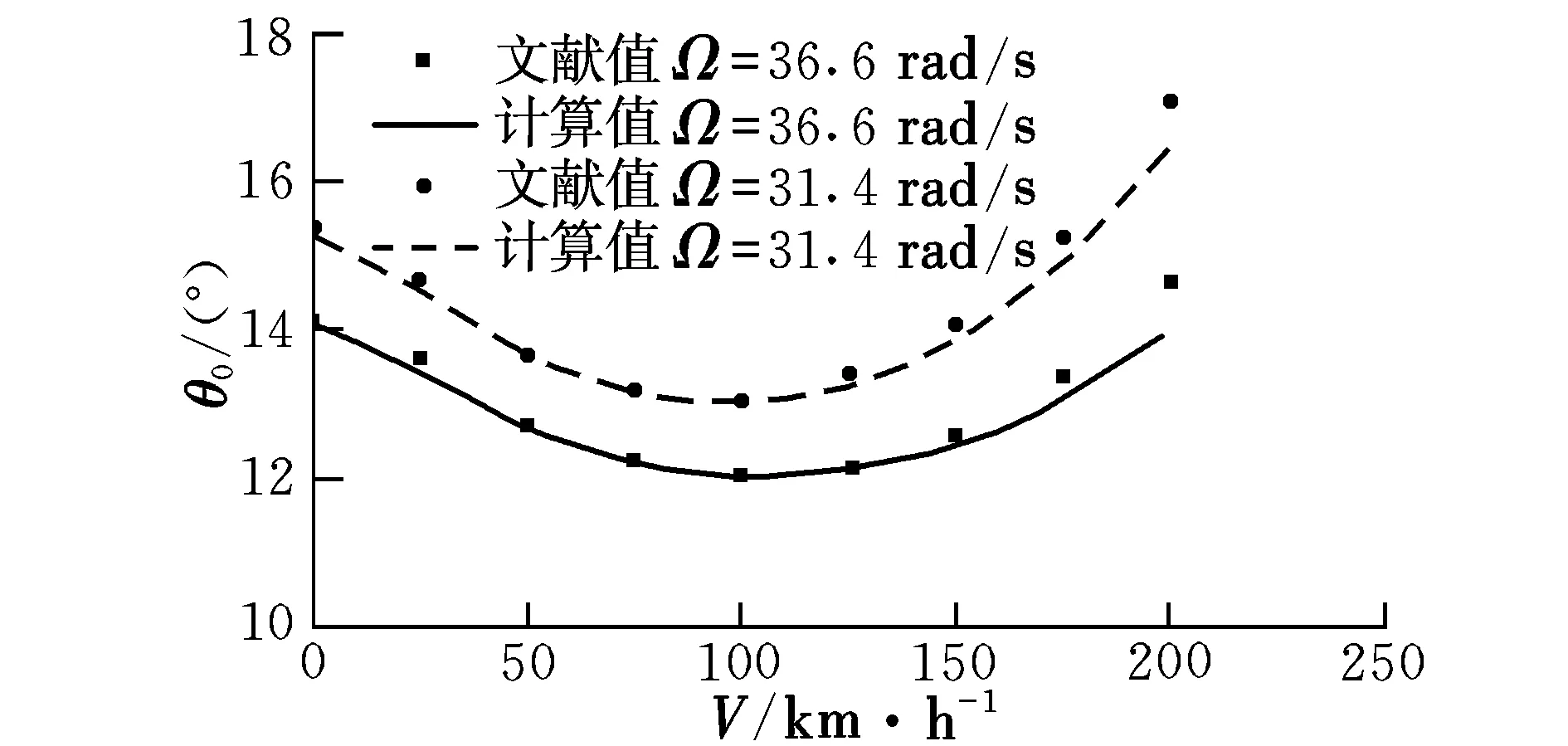
圖1 直升機總距計算對比Fig.1 Collective pitch varies with forward speeds
在計算得到直升機所有部件的氣動力后,按狀態空間法構建直升機的非線性全量方程:
(6)
上述方程組包含3個力平衡方程、3個力矩平衡方程以及3個運動學方程;狀態向量X包含了直升機的運動速度、角速度及姿態角;控制向量U則包含4個控制輸入。對直升機的全量方程進行線性化,可以得到直升機的氣動導數和操縱導數。
本文分別計算了尾槳轉速和旋翼轉速等比例變化(方案1)及尾槳轉速固定不變(方案2)對直升機操縱性、穩定性的影響,其中旋翼及尾槳轉速在懸停及巡航狀態時的量值如表1所示,其中6.11為比例系數。
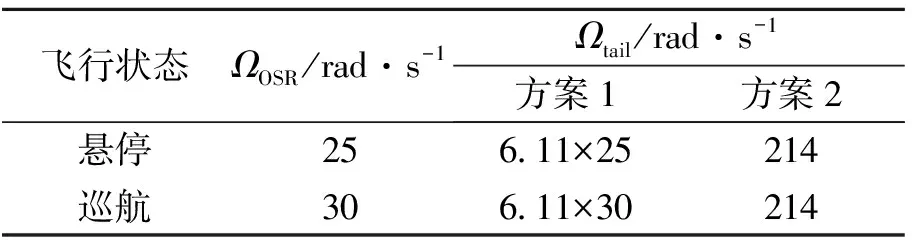
表1 旋翼及尾槳轉速Table 1 Speed of rotor and tail rotor
2 操縱性分析
由于尾槳轉速的大小將會影響直升機的操縱導數,進而改變直升機的橫航向操縱性。本文通過研究直升機對尾距操縱響應及航向帶寬來分析不同尾槳轉速方案時的直升機操縱性,將直升機的橫航向運動方程從線性化全量方程中分離出來,可以得到直升機偏航通道運動方程[9]:
(7)
對上式進行拉普拉斯變換,得到直升機偏航角速度對尾槳總距的傳遞函數。根據傳遞函數可以畫出直升機對航向操縱的脈沖響應圖,以及航向通道Bode圖。本文計算并獲得了直升機在懸停及巡航狀態(120 km/s)的脈沖響應及Bode圖,結果如圖2~圖4所示。
從圖2可以看出,在20 s內,當采用方案1時,偏航角最大響應值僅為70°,傾側角最大響應值為-0.7°;方案2的偏航角最大響應值為100°,傾側角的最大響應值為-1°。通過對比可以看出,在懸停狀態下,兩種尾槳轉速設計方案對直升機操縱性的影響主要體現在航向,而對橫向操縱性的影響不明顯。雖然采用方案2時直升機的航向操縱性要優于方案1,但采用尾槳轉速隨旋翼轉速聯動方案時,直升機偏航角在4 s左右就能達到70°,表明此設計方案的航向操縱性也較為理想。
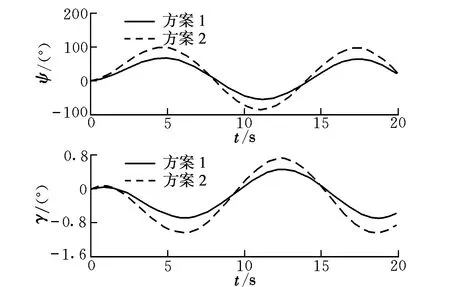
圖2 直升機懸停時對航向操縱的脈沖響應Fig.2 Impulse response for heading control in hover
圖3為直升機巡航狀態時的偏航角、傾側角脈沖響應。可以看出:在20 s時間內,采用方案1時的偏航角最大響應值為32°,傾側角最大響應值為-30°;方案2的偏航角最大響應值為37°,傾側角最大響應值為-35°。結果表明,尾槳轉速固定時的直升機橫航向操縱性要優于尾槳轉速隨旋翼轉速聯動時的情況,但這種優勢不是很明顯。
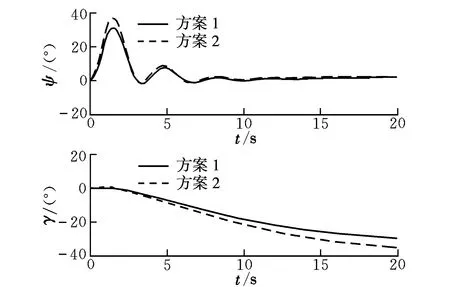
圖3 直升機巡航時對航向操縱的脈沖響應Fig.3 Impulse response for heading control in cruising
圖4為兩種尾槳轉速設計方案時的航向通道Bode圖。可以看出:在巡航狀態下,采用方案1時的相位帶寬為2.36 rad/s,增益帶寬為3.41 rad/s,滾轉通道的延遲時間為τp=0.056 s;而采用方案2時的相位帶寬為2.45 rad/s,增益帶寬為3.45 rad/s,滾轉通道的延遲時間為τp=0.057 s。帶寬反映了直升機對高頻操縱的反應能力,而響應滯后時間表示從操縱輸入到直升機開始響應的時間間隔。通過計算表明,采用兩種尾槳轉速設計方案的直升機帶寬及響應延遲時間基本一致,其中尾槳轉速固定不變時的直升機帶寬略大一些。
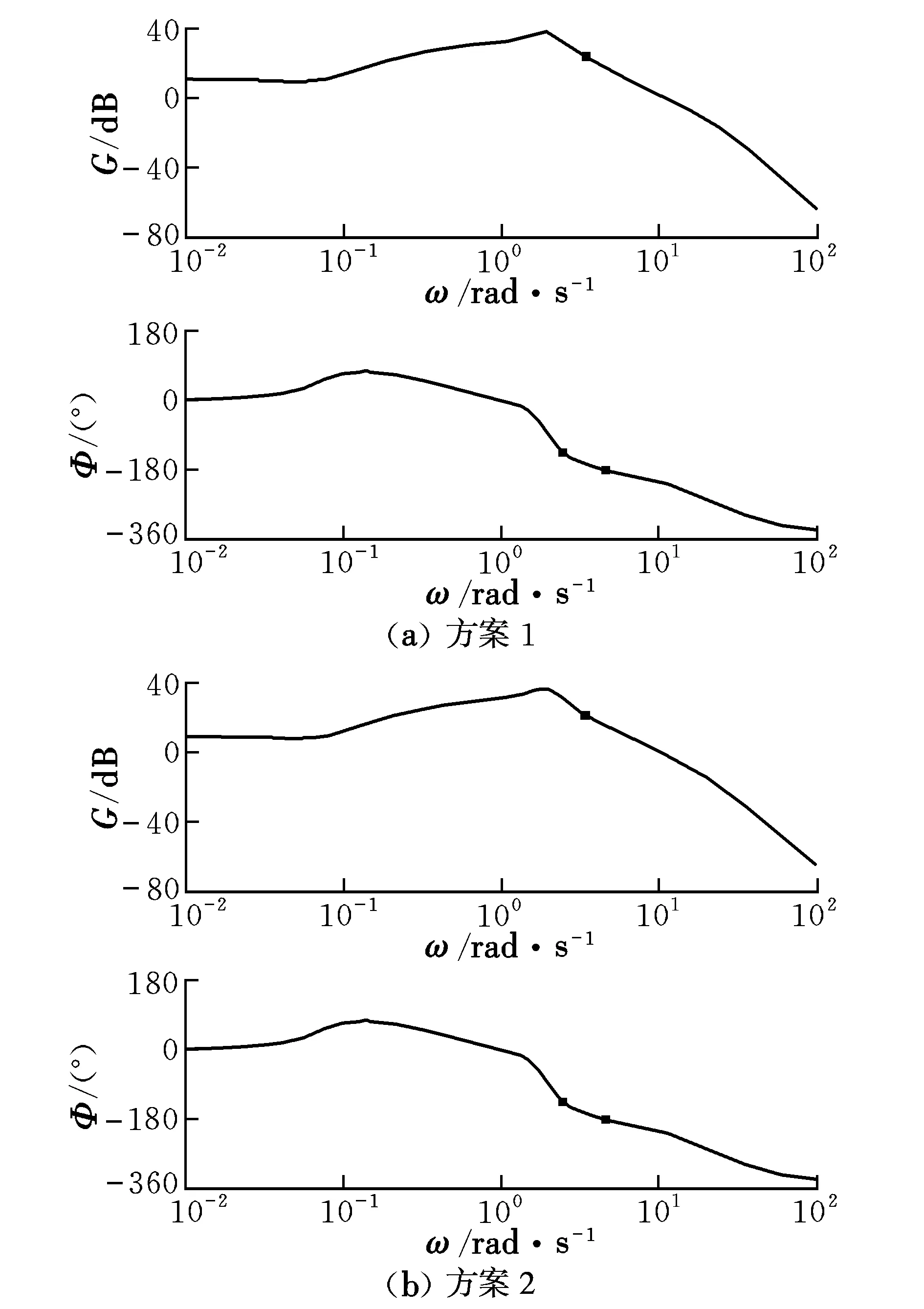
圖4 直升機巡航時航向通道Bode圖Fig.4 Bode diagram of heading channel in cruising
3 穩定性分析
通過求解式(7),得到直升機的橫向特征根,根據特征根可以分析直升機的穩定性。算例直升機在懸停及巡航狀態時的根軌跡如圖5和圖6所示。
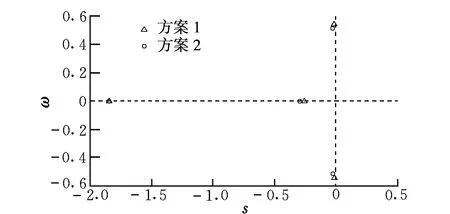
圖5 懸停時橫向特征根Fig.5 Lateral characteristic root in hover
從圖5可以看出:兩種尾槳轉速設計方案下的直升機旋翼橫航向運動模態基本一致,其中滾轉模態特征根完全一樣;而尾槳轉速不變時的直升機螺旋模態、橫側運動模態穩定性都略優于尾槳轉速變化時的穩定性。表明在懸停狀態下,樣例直升機的剛性旋翼提供了較大的阻尼,兩種尾槳轉速設計方案帶來的橫航向穩定性差異不大。
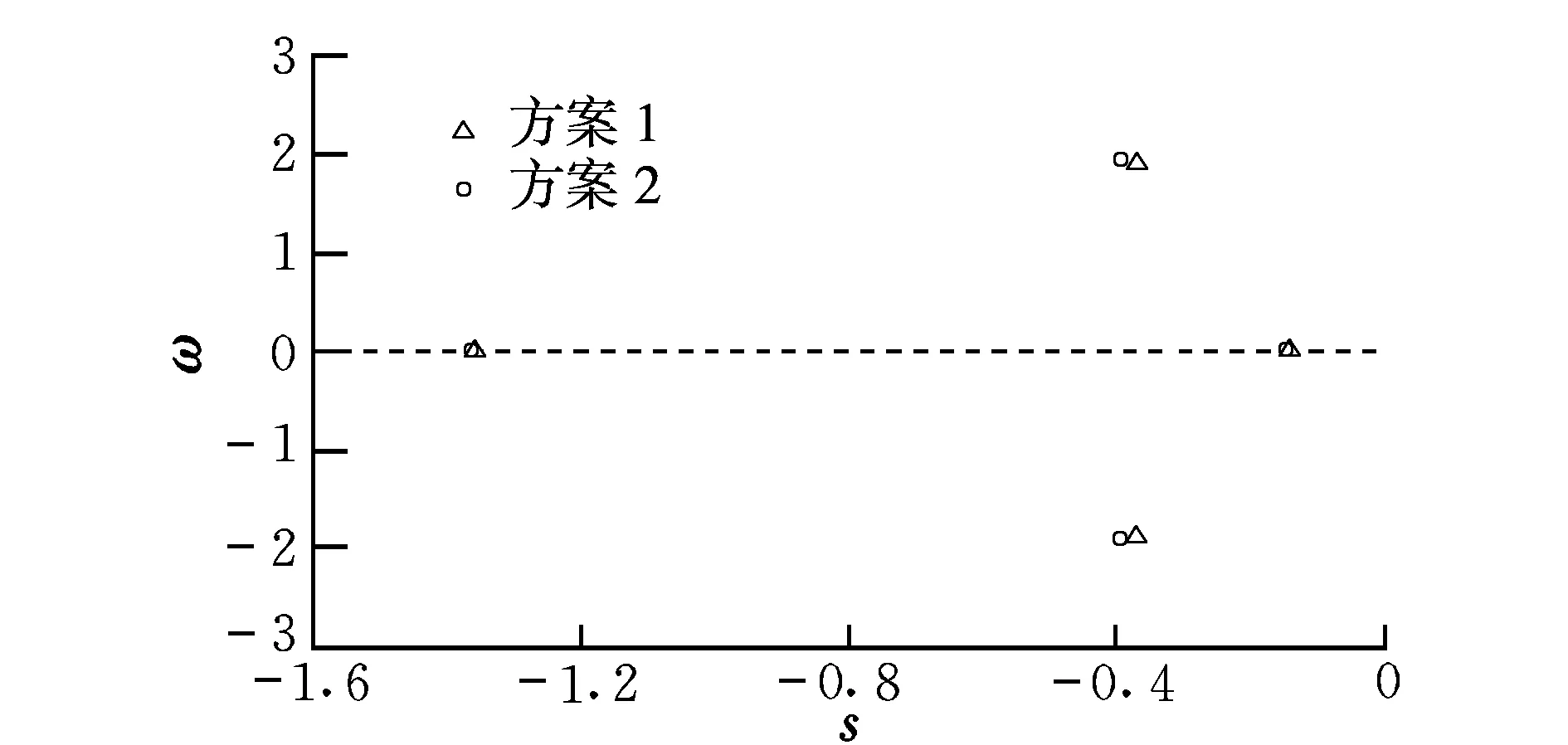
圖6 巡航時橫向特征根Fig.6 Lateral characteristic root in cruising
如圖6所示,在直升機巡航狀態,兩種尾槳轉速設計方案對橫航向穩定性的影響差異主要表現在直升機的荷蘭滾模態上,雖然尾槳轉速不變時的荷蘭滾穩定性更好,但其荷蘭滾周期為3.26 s,而尾槳轉速變化時的荷蘭滾周期則為3.33 s。總體而言,兩種尾槳轉速設計方案對直升機的橫航向穩定性影響差異較小。這是因為在巡航狀態時,直升機的橫航向穩定性由旋翼、垂尾與尾槳共同決定,而樣例直升機的無鉸式剛性旋翼又提供了較大的阻尼。雖然尾槳轉速設計方案1時的轉速較低,但尾槳總距是增加的,產生的尾槳側向力也沒有改變很大;因此設計方案1和設計方案2對直升機的氣動導數的影響基本一致。
在不考慮方案1對減輕直升機結構質量的情況下,根據配平后的旋翼及尾槳扭矩計算了不同尾槳轉速設計方案時的旋翼轉速優化直升機的需用功率,計算結果如圖7所示。

圖7 直升機需用功率Fig.7 Required power of helicopter
從圖中可以看出,在小速度及中等速度時,尾槳轉速設計方案1比方案2可以使直升機需用功率減小6%左右,如果考慮采用方案2給直升機帶來的結構質量,方案1對增加旋翼轉速優化直升機最大航時的優勢將更加明顯。
4 結束語
本文通過從全量方程中分離出橫航向運動方程,得到直升機對航向操縱的傳遞函數及橫向特征根,分析了不同尾槳轉速設計方案下的直升機橫航向操縱性及穩定性。通過對比發現,雖然尾槳轉速隨旋翼轉速變化方案在操縱性及穩定性上都不及尾槳轉速不變方案,但這種差距是很小的,通過無人直升機的飛控系統是完全可以彌補的。綜合考慮尾槳轉速隨旋翼轉速變化的方案對整個直升機需要功率的減小,以及傳動系統設計上都有很大的優勢,因此可以確定尾槳轉速隨旋翼轉速聯動的設計方案更適用于旋翼轉速優化直升機。
[1] James DiOttavio,Friedmann D.Operational benefits of an optimal widely variable speed rotor[C]//The 66th AHS Forum.Phoenix,AZ,2010.
[2] Prouty R W.Should we consider variable rotor speeds[J].Vertiflite,2004,50(4):24-27.
[3] Karem A E.Optimum speed rotor:US,60/075,509 [P].2001-5-10.
[4] 徐明,韓東,李建波.變轉速旋翼氣動特性分析及試驗研究[J].航空學報,2013,34(9):2047-2056.
[5] Steiner J,Farhan G.An investigation of variable rotor RPM on performance and trim[C]//The 64th AHS Forum,Montreal.Canada,2008.
[6] 張呈林,王華明.旋翼結構參數及動力學參數對直升機操縱穩定性的影響研究[J].南京航空航天大學學報,1995,27 (4):445-453.
[7] 呂少杰,曹義華,李國知.氣動布局參數對直升機飛行品質的影響[J].北京航空航天大學學報,2013,40(4):54-58.
[8] 韓東.變轉速旋翼直升機性能及配平研究[J].航空學報,2012,34(6):1241-1248.
[9] 高正,陳仁良.直升機飛行動力學[M].北京:科學出版社,2010.
(編輯:李怡)
Effect of tail rotor speed on controllability and stability of OSR helicopter
XU Ming, LI Jian-bo, HAN Dong
(National Key Laboratory of Rotorcraft Aeromechanics, NUAA, Nanjing 210016, China)
The equations of motion of the helicopter were derived based on state-space method. The effect of tail rotor speed on controllability and stability of Optimum Speed Rotor(OSR) helicopter were analyzed by calculating the impulse response of helicopter and characteristic root of lateral stability. The results show that compared with the tail rotor speed unchanged with rotor speed scheme, although the designs of tail rotor speed changing with rotor reduce the lateral-directional handling performance and stability; the effect is less. Thus, considering comprehensively the advantages of power and structure weight, the design of tail rotor speed changing with rotor is more suitable for OSR helicopter.
optimum speed rotor; tail rotor speed; stability; controllability
2014-04-28;
2014-08-20;
時間:2014-10-24 12:15
國家自然科學基金資助(11202097);江蘇省普通高校研究生科研創新計劃資助項目(CXLX13_164);中央高校基本科研業務費專項資金資助項目;旋翼動力學國家級重點實驗室基金資助(9140C400601120C40157)
徐明(1986-),男,江西湖口人,博士研究生,主要研究方向為直升機總體設計、直升機飛行動力學。
V212.4
A
1002-0853(2015)01-0005-04
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
