基于高階滑模的艦載機(jī)著艦動力補(bǔ)償系統(tǒng)仿真
2015-03-15 08:58:14陳俊鋒韓維胡洋
飛行力學(xué) 2015年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
陳俊鋒, 韓維, 胡洋
(1.海軍航空工程學(xué)院 飛行器動力工程系, 山東 煙臺 264001;2.中國人民解放軍 91934部隊(duì), 浙江 義烏 322000)
基于高階滑模的艦載機(jī)著艦動力補(bǔ)償系統(tǒng)仿真
陳俊鋒1, 韓維1, 胡洋2
(1.海軍航空工程學(xué)院 飛行器動力工程系, 山東 煙臺 264001;2.中國人民解放軍 91934部隊(duì), 浙江 義烏 322000)
將艦載機(jī)模型視為多輸入多輸出系統(tǒng),基于Quasi-Continuous高階滑模同時(shí)設(shè)計(jì)姿態(tài)穩(wěn)定系統(tǒng)和迎角恒定的動力補(bǔ)償系統(tǒng)。為避免傳統(tǒng)微分環(huán)節(jié)對輸入噪聲的放大作用,采用魯棒精確微分器對滑模面的高階導(dǎo)數(shù)進(jìn)行計(jì)算;為使系統(tǒng)有較快的響應(yīng)速度,基于ITAE準(zhǔn)則,對Quasi-Continuous高階滑模控制器中參數(shù)的選取進(jìn)行優(yōu)化。仿真結(jié)果表明,在艦尾流存在的情況下,所設(shè)計(jì)的動力補(bǔ)償系統(tǒng)能使航跡角準(zhǔn)確快速地響應(yīng)姿態(tài)角指令。
動力補(bǔ)償系統(tǒng); 多輸入多輸出; Quasi-Continuous高階滑模
0 引言
為保證著艦安全,艦載機(jī)著艦時(shí)需盡量減小著艦速度。此時(shí),艦載機(jī)工作在阻力曲線的背面,即“backside”區(qū),隨著飛行速度的減小,阻力迅速增大,若不進(jìn)行動力補(bǔ)償,艦載機(jī)的航跡角將不能跟蹤姿態(tài)角的變化,艦載機(jī)將處于不可控狀態(tài)[1]。為解決這一問題,美國海軍艦載機(jī)采用迎角恒定的動力補(bǔ)償系統(tǒng)(APCS),可實(shí)現(xiàn)飛行軌跡對姿態(tài)角的快速精確響應(yīng)[2-3]。
設(shè)計(jì)APCS系統(tǒng)的基礎(chǔ)是保持姿態(tài)角穩(wěn)定,即以穩(wěn)定可靠的姿態(tài)穩(wěn)定系統(tǒng)為前提。現(xiàn)有的文獻(xiàn)多將艦載機(jī)運(yùn)動方程視為兩個單輸入單輸出(SISO)系統(tǒng),采用不同的控制策略將姿態(tài)控制系統(tǒng)與動力補(bǔ)償系統(tǒng)分開設(shè)計(jì)[4-6]。本文將艦載機(jī)著艦狀態(tài)下的運(yùn)動方程視為多輸入多輸出(MIMO)系統(tǒng),基于Quasi-Continuous高階滑模,設(shè)計(jì)了某算例飛機(jī)的APCS系統(tǒng),并進(jìn)行了仿真驗(yàn)證。
1 建立模型
1.1 艦尾流模型
艦載機(jī)著艦時(shí),最大著艦誤差來自于艦尾氣流對飛機(jī)的擾動。當(dāng)艦載機(jī)進(jìn)場,離艦約800 m時(shí),MIL-F-8785C軍用規(guī)范將艦尾氣流視作自由大氣紊流分量、尾流穩(wěn)態(tài)分量、尾流周期性分量和尾流隨機(jī)分量的合成。艦尾氣流仿真結(jié)果如圖1所示。
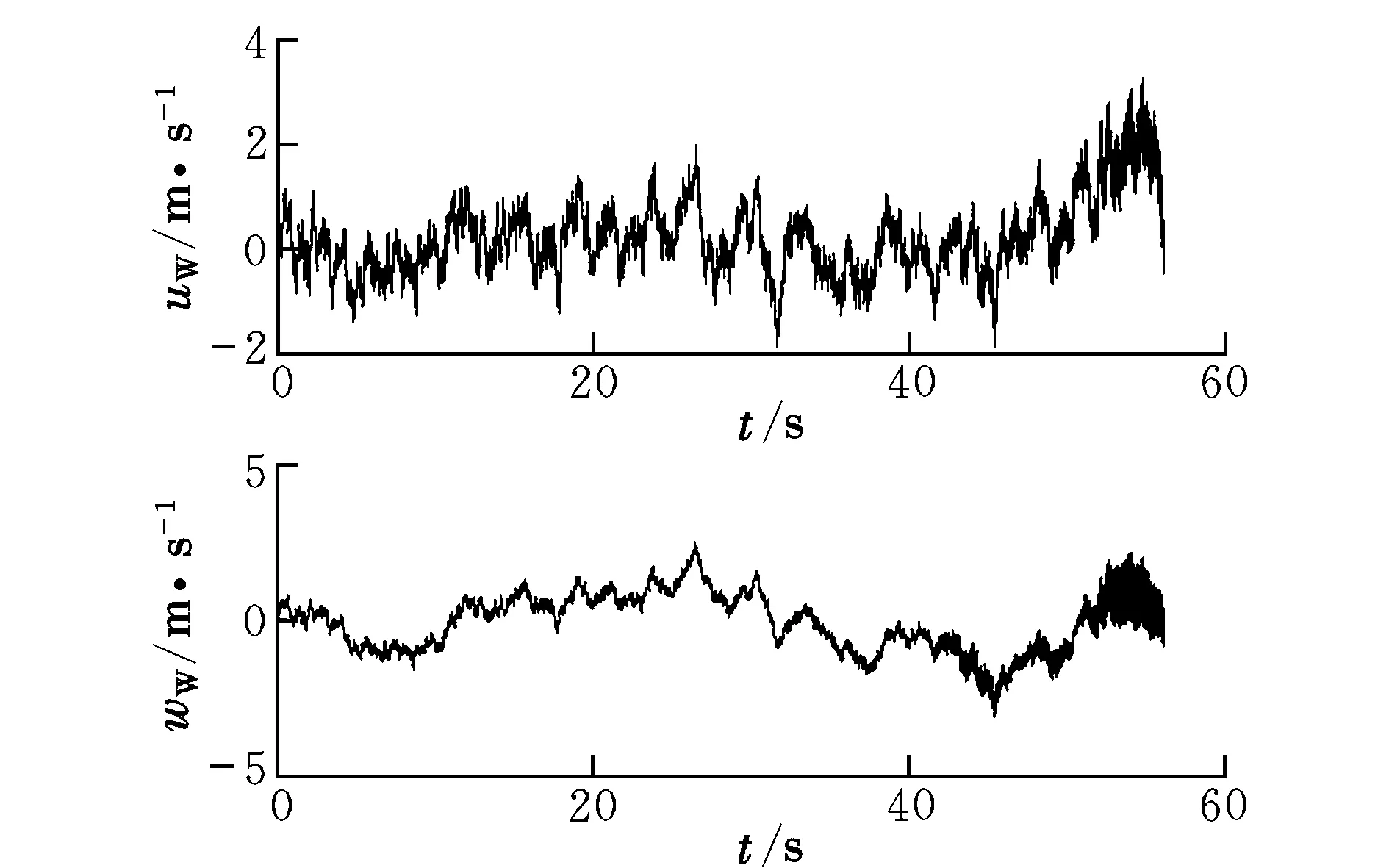
圖1 艦尾氣流仿真結(jié)果Fig.1 Simulation results of the air wake
1.2 艦載機(jī)模型
非平靜大氣中飛機(jī)的縱向小擾動線性化方程為[7]:
(1)
式中:D*=-[D0+Tα(α0+σ)+Lα];其余各符號含義見文獻(xiàn)[7]。其控制模型為:
(2)
y=Cx
(3)
其中:
則式(2)和式(3)構(gòu)成了兩輸入兩輸出系統(tǒng)。
2 APCS系統(tǒng)設(shè)計(jì)
2.1 滑模面設(shè)計(jì)
迎角恒定的APCS系統(tǒng)以姿態(tài)角準(zhǔn)確跟蹤姿態(tài)角指令為前提,以著艦過程中迎角基本保持不變?yōu)槟康摹R虼?APCS系統(tǒng)設(shè)計(jì)過程中以[αd,θd]T為期望輸出。則滑模面可設(shè)計(jì)為:
(4)
在理想無擾動情況下,對s1取一階導(dǎo)數(shù),s2取二階導(dǎo)數(shù),注意到c2Β=0,可得:
(5)
令
(6)
S=F+Gu
(7)
其中:
2.2 輸出解耦

u=-G-1(F-w)
(8)

S=w
(9)
的有限時(shí)間鎮(zhèn)定問題。
2.3 Quasi-Continuous高階滑模控制算法
針對式(9)的有限時(shí)間鎮(zhèn)定問題,Levant[9]提出了Quasi-Continuous高階滑模控制(QCHOSM)算法。QCHOSM保留了傳統(tǒng)滑模結(jié)構(gòu)簡單、對擾動和未建模動態(tài)有不變性的優(yōu)點(diǎn),同時(shí)還具有控制精度高、消除相對階限制、在趨近段控制律保持連續(xù)和通過將控制作用在輸入的一階或高階導(dǎo)數(shù)上還可削弱抖振等優(yōu)點(diǎn)。因此在工程和理論研究領(lǐng)域引起了普遍關(guān)注[10]。
為削弱抖振,將控制作用在w的一階導(dǎo)數(shù)上,通過積分作用消除符號函數(shù)sign(·)對w的直接影響,使w在時(shí)間上本質(zhì)連續(xù)。控制器設(shè)計(jì)如下:
(10)
(11)
式中:λ0,λ1,…,λk>0;L>0為Lipschitz常數(shù)。
選取合適的參數(shù),可使式(11)在有限時(shí)間內(nèi)收斂到z0=f(t);zi=vi-1=f(i)(t) (i=1,2,…,k)。對于五階以下微分的計(jì)算,可取λ0=1.1,λ1=1.5,λ2=2,λ3=3,λ4=5,λ5=8。
2.4 APCS系統(tǒng)結(jié)構(gòu)
基于前述分析結(jié)果,本文設(shè)計(jì)的APCS系統(tǒng)結(jié)構(gòu)如圖2所示。
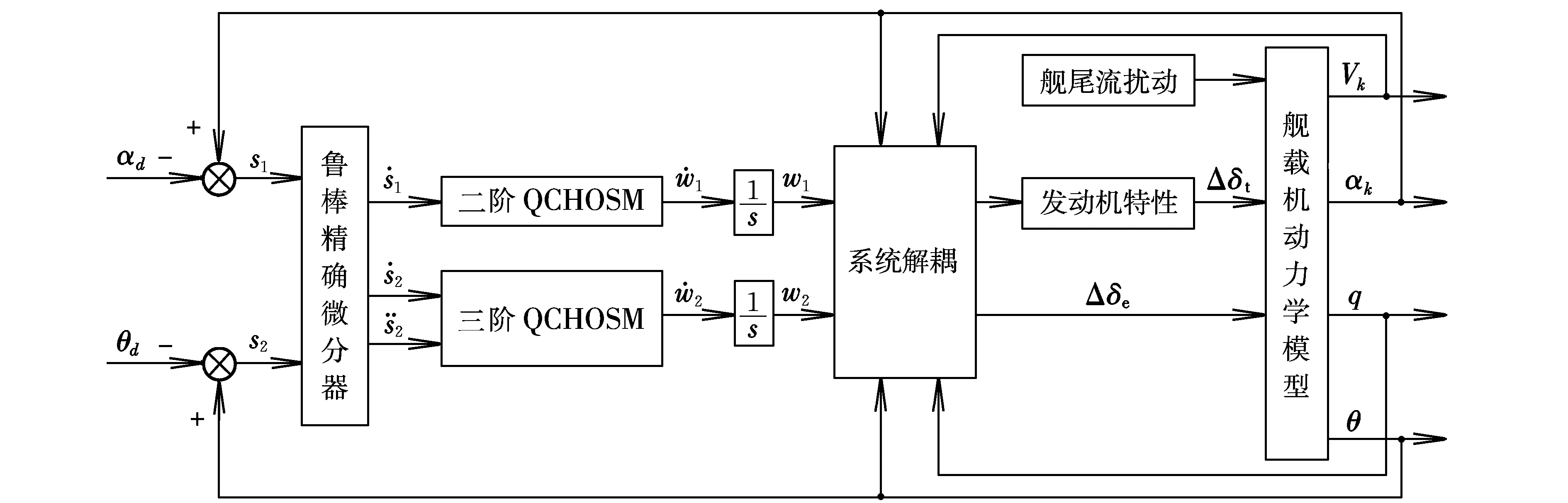
圖2 APCS系統(tǒng)結(jié)構(gòu)Fig.2 Structure of APCS
3 仿真結(jié)果及分析
在MATLAB/SIMULINK中建立系統(tǒng)仿真模型,基于ITAE原則[13],利用MATLAB自帶的遺傳算法工具箱分別對式(5)和式(11)中k1,k2,a1,a2的值進(jìn)行優(yōu)化。最終優(yōu)化結(jié)果為k1=0.4,k2=18.5,a1=48,a2=42.5。
在t=0 s時(shí)加入αd=0°,θd=1°的指令,并持續(xù)到56 s。仿真結(jié)果如圖3~圖7所示。由于10 s后各曲線已趨于平穩(wěn),因此均未表示出來。
圖3~圖5分別為迎角、姿態(tài)角和航跡角響應(yīng)曲線。從圖中可以看出:姿態(tài)角對姿態(tài)角指令響應(yīng)的上升時(shí)間為1.2 s,調(diào)節(jié)時(shí)間為2.4 s,有8%左右的超調(diào),且穩(wěn)態(tài)無振蕩;迎角在約2.5 s后進(jìn)入穩(wěn)態(tài),其振蕩量級為10-4;由于迎角變化很小,航跡角響應(yīng)基本與姿態(tài)角同步,其振蕩量級也為10-4。
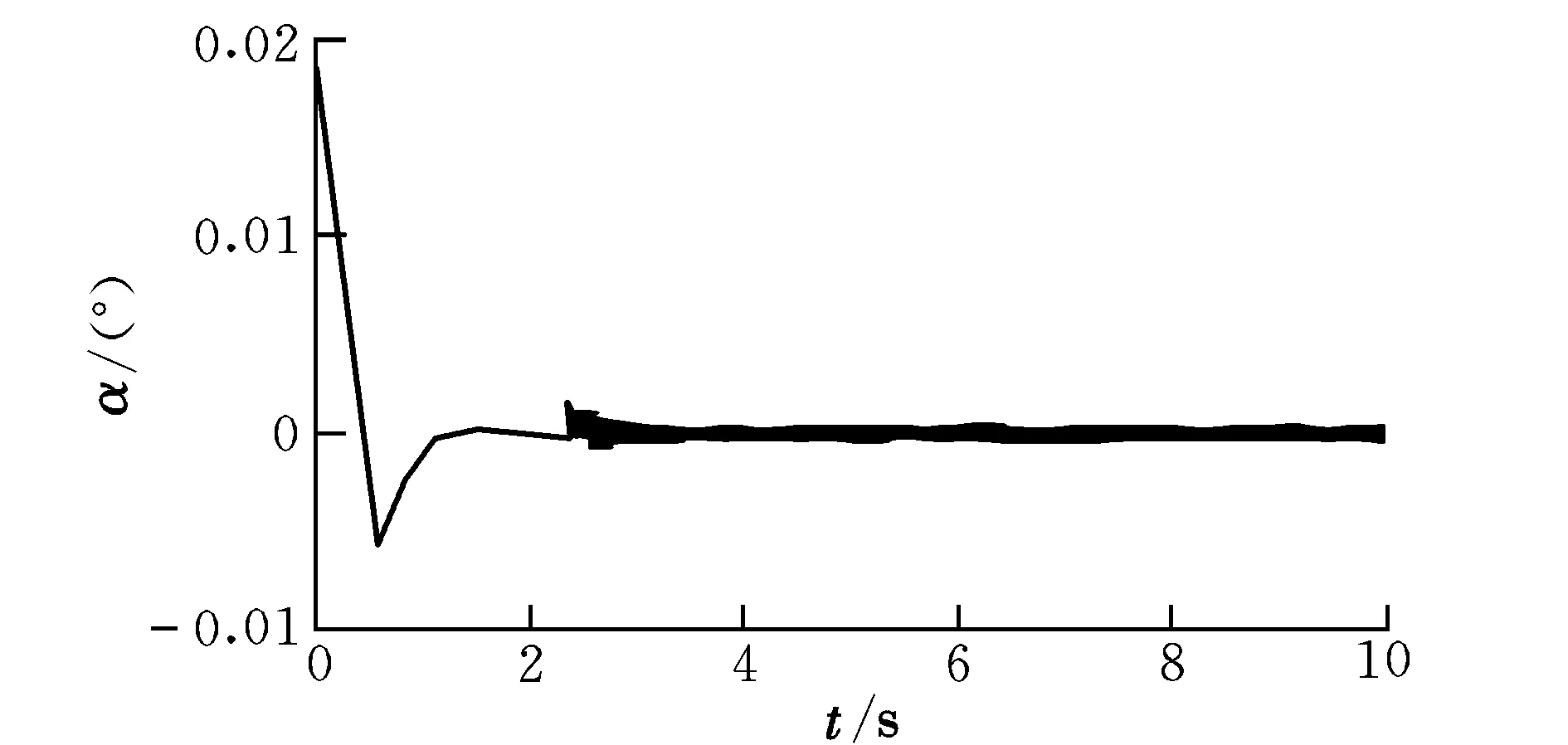
圖3 迎角響應(yīng)曲線Fig.3 Response curve of the angle of attack
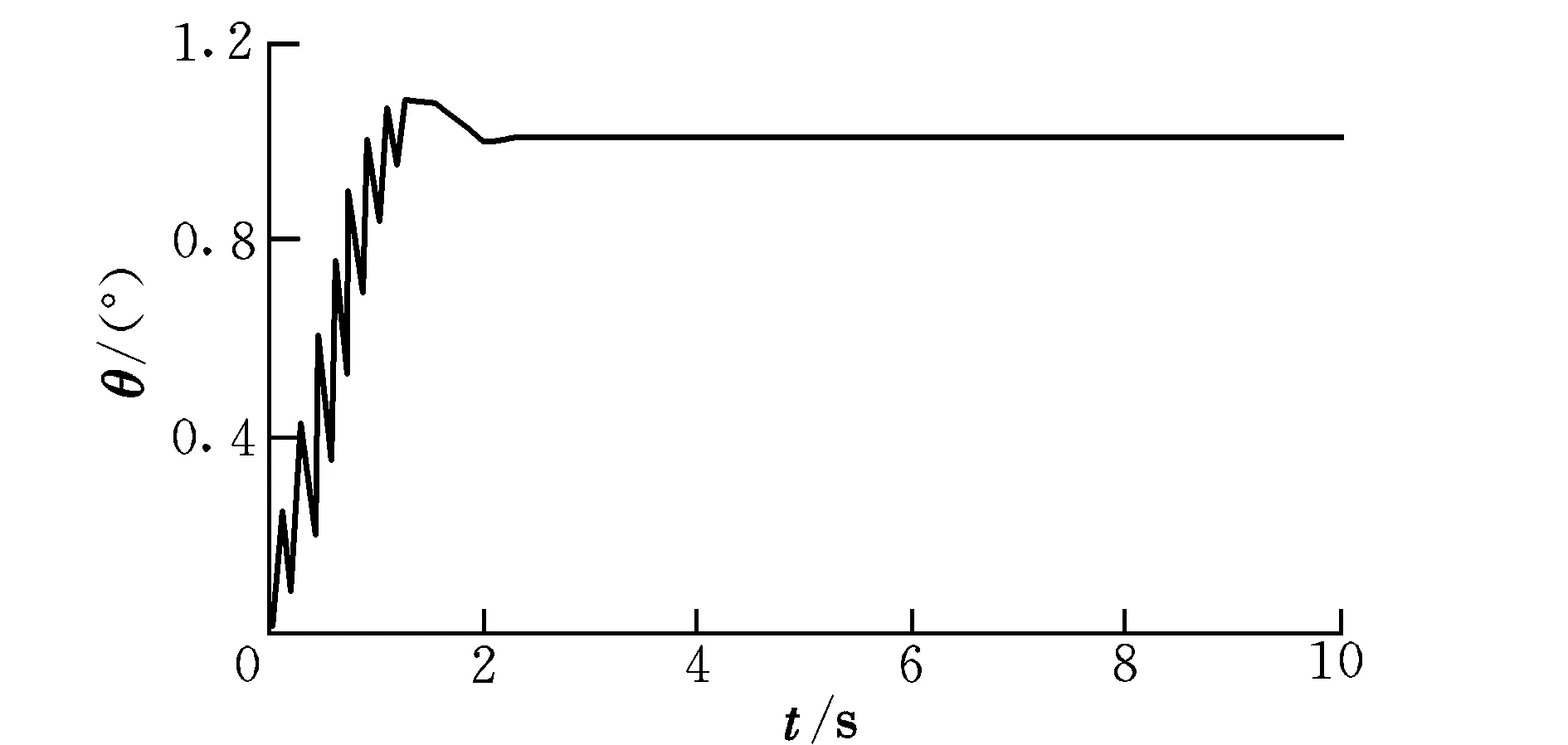
圖4 姿態(tài)角響應(yīng)曲線Fig.4 Response of attitude angle
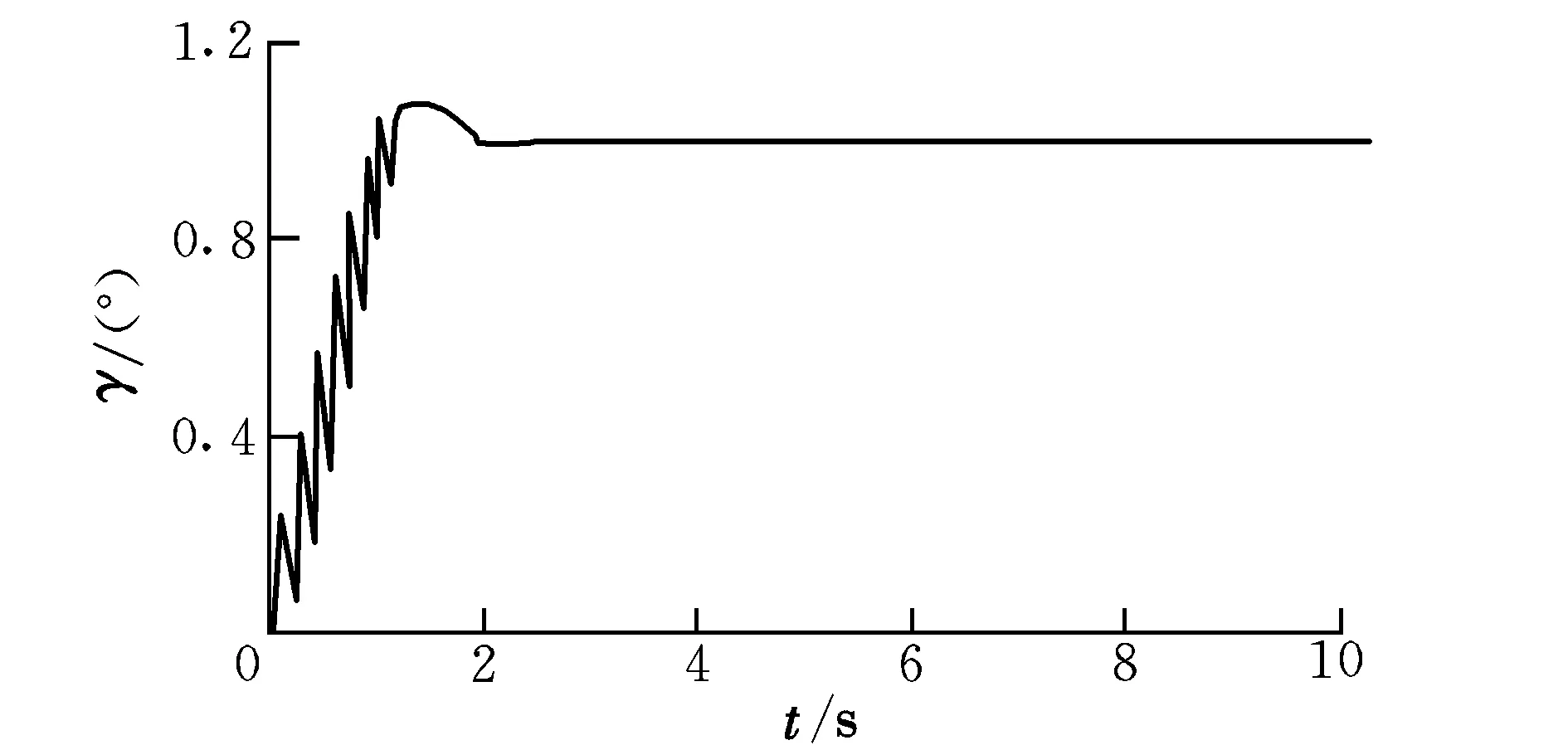
圖5 航跡角響應(yīng)曲線Fig.5 Response of flight path angle
圖6為推力變化曲線,可以看出:在到達(dá)滑模面之前的趨近段,推力曲線保持連續(xù);到達(dá)滑模面之后,由于發(fā)動機(jī)本身的濾波特性,推力曲線無抖振。圖7為升降舵偏轉(zhuǎn)曲線,可以看出:在到達(dá)滑模面之前升降舵偏轉(zhuǎn)曲線連續(xù),這是由QCHOSM算法的特性決定的;到達(dá)滑模面之后,由于把控制作用在升降舵偏轉(zhuǎn)角的一階導(dǎo)數(shù)上,使得升降舵偏轉(zhuǎn)角在時(shí)間上本質(zhì)連續(xù)。
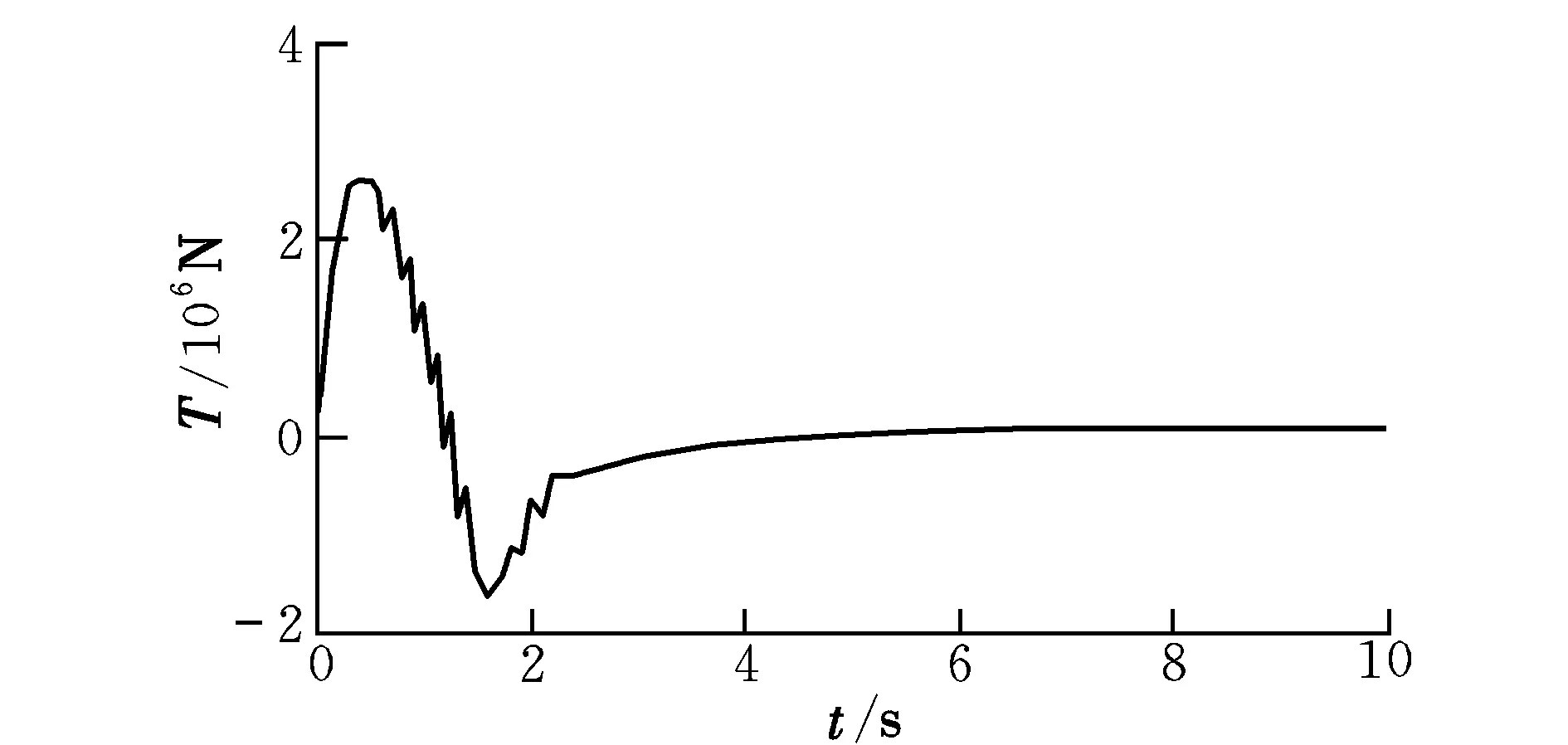
圖6 推力變化曲線Fig.6 Curve of thrust variation
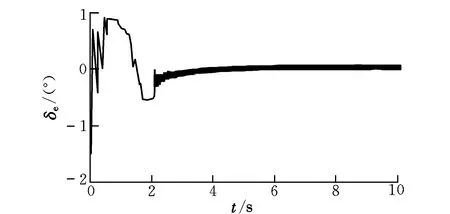
圖7 升降舵偏轉(zhuǎn)曲線Fig.7 Curve of the elevator deflection
4 結(jié)束語
本文基于QCHOSM同時(shí)設(shè)計(jì)了某算例艦載機(jī)的姿態(tài)穩(wěn)定系統(tǒng)和迎角恒定的動力補(bǔ)償系統(tǒng)。仿真結(jié)果表明,在艦尾流存在的情況下,本文所設(shè)計(jì)的動力補(bǔ)償系統(tǒng)能使航跡角準(zhǔn)確快速地響應(yīng)姿態(tài)角指令,且升降舵偏轉(zhuǎn)角和發(fā)動機(jī)推力在時(shí)間上本質(zhì)連續(xù)。但文中的解耦部分采用的是全狀態(tài)反饋,這在工程應(yīng)用中有相當(dāng)大的局限性,下一步應(yīng)設(shè)計(jì)具有魯棒性的狀態(tài)觀測器,對系統(tǒng)狀態(tài)進(jìn)行估計(jì)。
[1] 王新華,楊一棟,朱華.低動壓著艦狀態(tài)下飛機(jī)的操縱特性研究[J].飛行力學(xué),2007,25(4):29-32.
[2] Martorella P,Kelly C P,Nastasi R.Precision flight path control in carrier landing approach—a class for integrated system design[R].AIAA-81-1710,1981.
[3] Fortenbangh R L.Practical integration of direct lift control into an automatic carrier landing system[R].AIAA-72-873,1972.
[4] 滿翠芳.艦載機(jī)自動著艦控制技術(shù)研究[D].南京:南京航空航天大學(xué),2010.
[5] 李英杰.艦載機(jī)著艦導(dǎo)引特殊技術(shù)研究[D].青島:海軍航空工程學(xué)院,2007.
[6] 李新飛.艦載機(jī)起降關(guān)鍵技術(shù)仿真研究[D].哈爾濱:哈爾濱工程大學(xué),2012.
[7] 肖業(yè)倫,金長江.大氣擾動中的飛行原理[M].北京:國防工業(yè)出版社,1993:87-88.
[8] Slotine E,Li Weiping.Applied nonlinear control [M].New Jersey:Prentice-Hall International Inc,1991:144-149.
[9] Levant A.Quasi-continuous high-order sliding-mode controller [J].IEEE Transactions on Automatic Control,2005,50(11):1812-1816.
[10] 皇甫宜耿,Laghrouche S,劉衛(wèi)國,等.一種高階滑模控制的永磁同步電機(jī)磁通和電阻辨識[J].西北工業(yè)大學(xué)學(xué)報(bào),2010,28(5):684-688.
[11] 韓京清.自抗擾控制技術(shù) [M].北京:國防工業(yè)出版社,2007:60-69.
[12] Angulo M,Fridman L,Levant A.Robust exact finite-time output based control using high-order sliding modes [J].International Journal of Systems Science,2011,42(11):1847-1857.
[13] 符曦.系統(tǒng)最優(yōu)化及控制[M].北京:機(jī)械工業(yè)出版社,1995:15-17.
(編輯:李怡)
Power compensation system simulation of carrier-based aircraft landing with high-order sliding mode
CHEN Jun-feng1, HAN Wei1, HU Yang2
(1.Department of Airborne Vehicle Engineering, NAAU, Yantai 264001, China;2.91934 Unit of the PLA, Yiwu 322000, China)
This paper regards the control-oriented model of carrier aircraft as multi-inputs-multi-outputs system, the flight control system and automatic power compensate system were designed simultaneously based on the Quasi-Continuous high-order sliding mode. The higher derivatives of sliding mode manifold were calculated by robust exact differentiator in order to avoid amplifying the input noise amplitude. The parameters of the controllers were tuned based on the ITAE criterion. Simulation results show that the flight path angle can follow the pitch angle precisely and rapidly under the carrier air wake.
power compensate system; multi-inputs-multi-outputs; Quasi-Continuous higher-order sliding mode
2014-05-23;
2014-08-20;
時(shí)間:2014-10-24 12:08
陳俊鋒(1988-),男,河南許昌人,博士研究生,研究方向?yàn)轱w行器動力學(xué)。
V249.1
A
1002-0853(2015)01-0026-04
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
