UCAV最優筋斗機動實時指令生成設計
2015-03-15 08:58:16彭永濤劉林
飛行力學 2015年1期
彭永濤, 劉林
(西安飛行自動控制研究所 飛行器控制一體化技術國防科技重點實驗室, 陜西 西安 710065)
UCAV最優筋斗機動實時指令生成設計
彭永濤, 劉林
(西安飛行自動控制研究所 飛行器控制一體化技術國防科技重點實驗室, 陜西 西安 710065)
提出了基于時間最短的無人作戰飛機(UCAV)筋斗機動動作實時軌跡生成方法。利用機載計算機預先裝訂的UCAV氣動及三自由度飛機模型,實時生成具有迎角及法向過載保護的最優軌跡指令,同時采用經典控制方法進一步縮小跟蹤誤差,最終實現了UCAV所需的筋斗機動。仿真結果表明,該方法具有實時性強、生成軌跡易于跟蹤控制、可有效保證飛行安全等優點。
無人作戰飛機; 最優筋斗機動; 實時機動指令
0 引言
在飛機筋斗機動操縱過程中,一般從法向過載的指令生成序列及飛行員操縱規范進行描述[1],而當該方案在無人作戰飛機筋斗機動實施過程中,由于氣動及環境因素不確定的影響,很難做到指令的適應性,也很難保證無人作戰飛機(UCAV)的飛行安全。另外一個值得注意的問題是,筋斗機動優劣的評估指標除了保證飛行安全外[2],還以時間最短為戰術評估指標。本文提出了一種基于時間最短的指令生成算法,在確保飛行安全的同時,實現時間最短直筋斗機動。通過數字仿真,證實本文方法能夠較為完善地解決這一問題。
1 控制策略
通過控制UCAV的速度、航跡傾角及航跡偏航角,即可實現對航跡的精確控制[2-4]。因此,利用三自由度的質點飛機模型就可以達到生成實時軌跡參考值的目的[5],即將UCAV三自由度的質點飛機模型及相關氣動數據裝載進機載計算機,通過機載軟件實時計算生成動態軌跡指令。機動動作軌跡參考值解算使用的航跡坐標系中的飛機動力學方程為:
(1)
(2)
式中:m為飛機質量;V為空速;T為發動機推力;D為阻力;L為升力;γ為航跡角。
考慮到機載模型在無風條件下運行,因此,繞速度矢的滾轉角γs由下式解算:
γs=arcsin[(sinγcosJ)/cosθ]
(3)
本文UCAV機動飛行控制是在控制增穩(CAS)回路(控制指令為法向過載指令)的基礎上,加入實時機動指令構成的。控制UCAV做預期筋斗機動動作的控制策略如圖1所示。由UCAV飛管決策系統根據對當前態勢的感知,決策并指令UCAV進行機動;機動指令實時生成單元根據當前收到的UCAV位置姿態等信息,對機載UCAV模型進行初始匹配并啟動實時仿真,生成期望軌跡,并向動態逆及PID控制單元提供相關期望數據;動態逆及PID控制單元根據期望數據和反饋的位置姿態信息進行控制律運算,然后向控制增穩單元輸出機動指令控制量,進一步指令UCAV做出預期機動動作。
實現上述控制策略的關鍵在于UCAV模型的建立、UCAV對機載模型生成的機動指令跟蹤。本文建立機載模型、引入機動時間指標,并結合經典PID和動態逆技術[6-7],在確保安全、提高機動能力的同時,實現UCAV對指令的良好跟蹤。
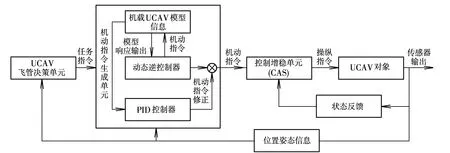
圖1 UCAV筋斗機動控制策略結構圖Fig.1 Control framework of the UCAV’s loop maneuver
2 筋斗機動時間指標要求
2.1 時間指標代價函數
評判作戰UCAV常規機動性能好壞的一個重要標準是機動時間tk,tk越小則機動性能越好。在垂直面內進行筋斗機動時,tk可按俯仰角的變化給出,如下式所示:
(4)
(5)
式中:nz為法向過載;V為空速;φ為滾轉角;θ為俯仰角;g為重力加速度。
UCAV俯仰角的測角范圍為-90°~90°,滾轉角的測角范圍為-180°~180°。UCAV在筋斗機動過程中,其垂直平面可分為四個象限[8]:第一象限俯仰角為0°~90°,期望滾轉角約為0°,滾轉角攝動范圍-90°~90°;第二象限俯仰角為90°~0°,期望滾轉角為-180°或180°,滾轉角攝動范圍-90°~-180°或90°~180°;第三象限俯仰角為0°~-90°,期望滾轉角為-180°或180°,滾轉角攝動范圍-90°~-180°或90°~180°;第四象限俯仰角為-90°~0°,期望滾轉角為0°,滾轉角攝動范圍-90°~90°。因此,式(5)指標代價函數中,cosφ在第一和第四象限過程中為1.0,屬正飛狀態,此時,對于某個特定狀態(該時刻假定速度不變),則時間對俯仰角的導數(dθ為正值)與法向過載nz成反比,即nz越大時間導數(dtk為正值)越小。在第二和第三象限過程中為-1.0,此時,對于某個特定狀態(該時刻假定速度不變),則時間對俯仰角的導數(dθ為負值)與法向過載nz成反比,即nz越大時間導數(dtk為正值)越小。綜上所述,由性能代價函數式(5)可知,如果期望筋斗過程時間最短,則需整個過程法向過載nz最大。
2.2 筋斗機動指令生成可行性分析
由式(5)可知,若使tk最小,需nz在筋斗過程中的任一俯仰角條件下達到最大,記為nzmax,則有下式成立:
(6)
當nzmax最大時,則根據氣動計算公式可知升力系數CLmax最大,即有下式成立:
nzmax=[qS/(mg)]CLmax
(7)
式中:q為當前動壓;S為機翼面積。
最大升力系數的獲取可根據風洞試驗和試飛數據修正的氣動數據插值得到。一般UCAV的升力系數由高度、馬赫數和迎角插值得到,可表示為:
CL=f(H,α,Ma)
(8)
在高度和馬赫數一定情況下,在可用迎角范圍內,升力系數與迎角成正比,即升力系數隨迎角的增大而增大。因此為獲得最大CLmax,需在可用迎角允許范圍內使迎角達到最大值αmax。
3 筋斗機動指令生成
3.1 基于動態逆的過載指令生成
非線性動態逆方法可以直觀地理解為:為了使系統輸出獲得某個期望值,將系統的輸出假定為該期望值,反算系統需要的輸入值。所得輸入值為時間和狀態變量的非線性函數,也就是所謂的非線性動態逆控制律。因此,將UCAV迎角的最大限制αmax假定為期望值,根據式(8)來反算系統需要的CLmax輸入值,然后,根據式(7)來反算系統需要的nzmax輸入值,最后,根據設計需要生成過載指令。整個過程如圖2所示。
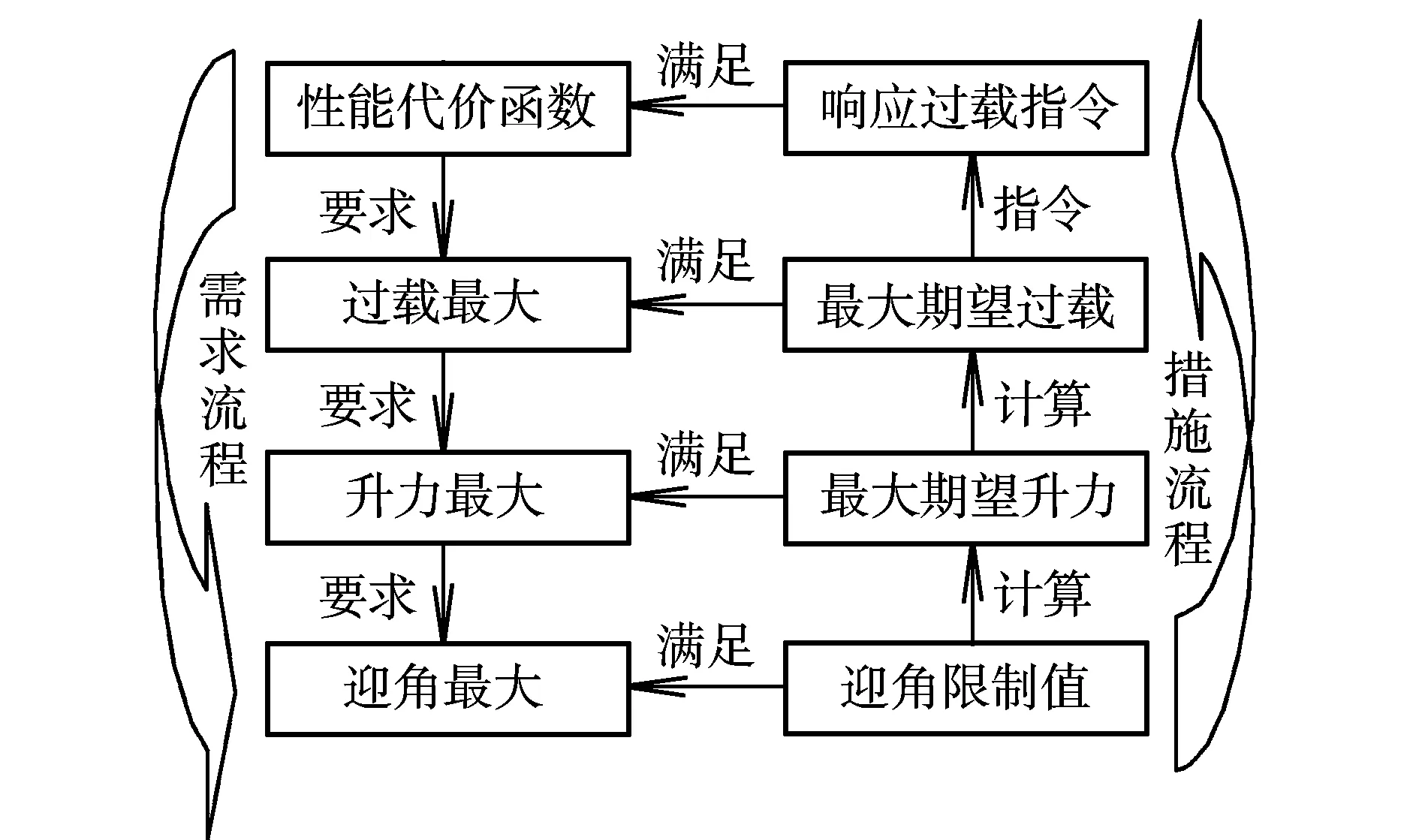
圖2 筋斗機動指令生成過程Fig.2 Process of producing the loop maneuver command
3.2 基于PID控制的指令補償
筋斗機動時由于指令動態變化,造成指令跟蹤滯后,帶來實際響應與機載UCAV模型的跟蹤誤差。因此,需對過載指令進行補償,簡化的補償方法如圖3所示。
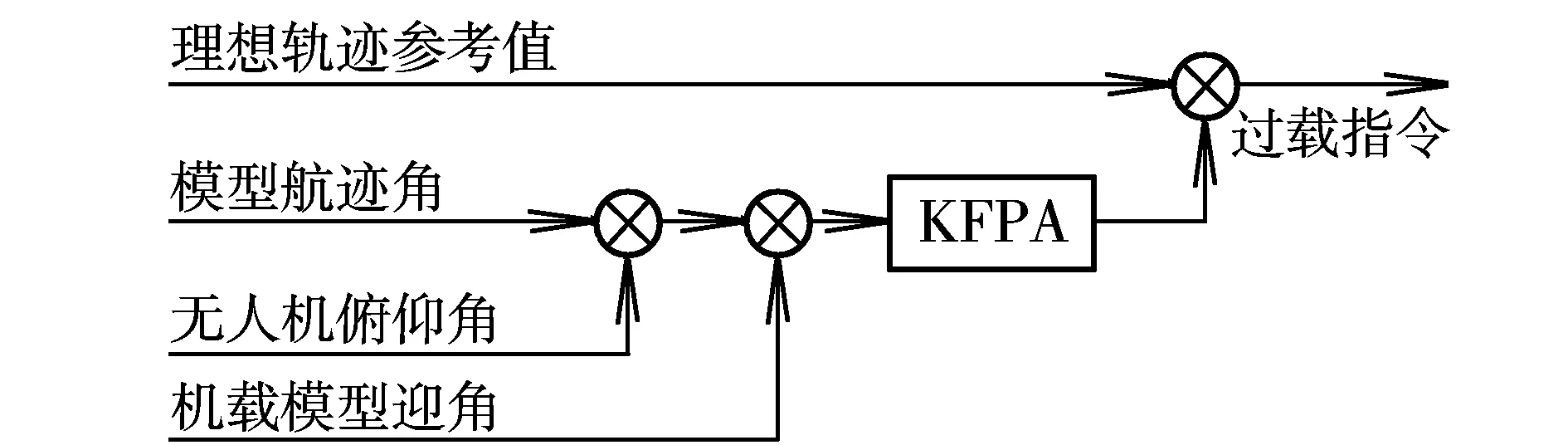
圖3 筋斗機動PID補償計算Fig.3 PID compensatory arithmetic of the loop maneuver
4 仿真驗證
按如下步驟生成縱向過載指令:(1)選定UCAV筋斗機動最大允許迎角αmax,這里,進入筋斗執行段時αmax=20.0°。當機載模型航跡角經過第四象限,并接近平飛時,將AOA-LIM的取值淡化到平飛所需迎角。(2)計算最大過載指令nzmax,并根據nzmax仿真機載模型。(3)啟動PID控制指令補償計算,經指令限幅后,得到UCAV控制指令nzc,根據nzc驅動UCAV控制增穩單元(CAS),實現UCAV機動。
半物理仿真條件下,UCAV進入筋斗機動的高度為2 000 m,空速為220 m/s,仿真結果如圖4所示。筋斗進入時間為445 s,退出時間為471.2 s,共持續約26.2 s。設計迎角限制值為20°,實際值最大約為19.5°,符合設計要求;另外,整個過程過載最大允許值為nzmax=5。仿真結果表明,整個過程響應過載符合設計要求。
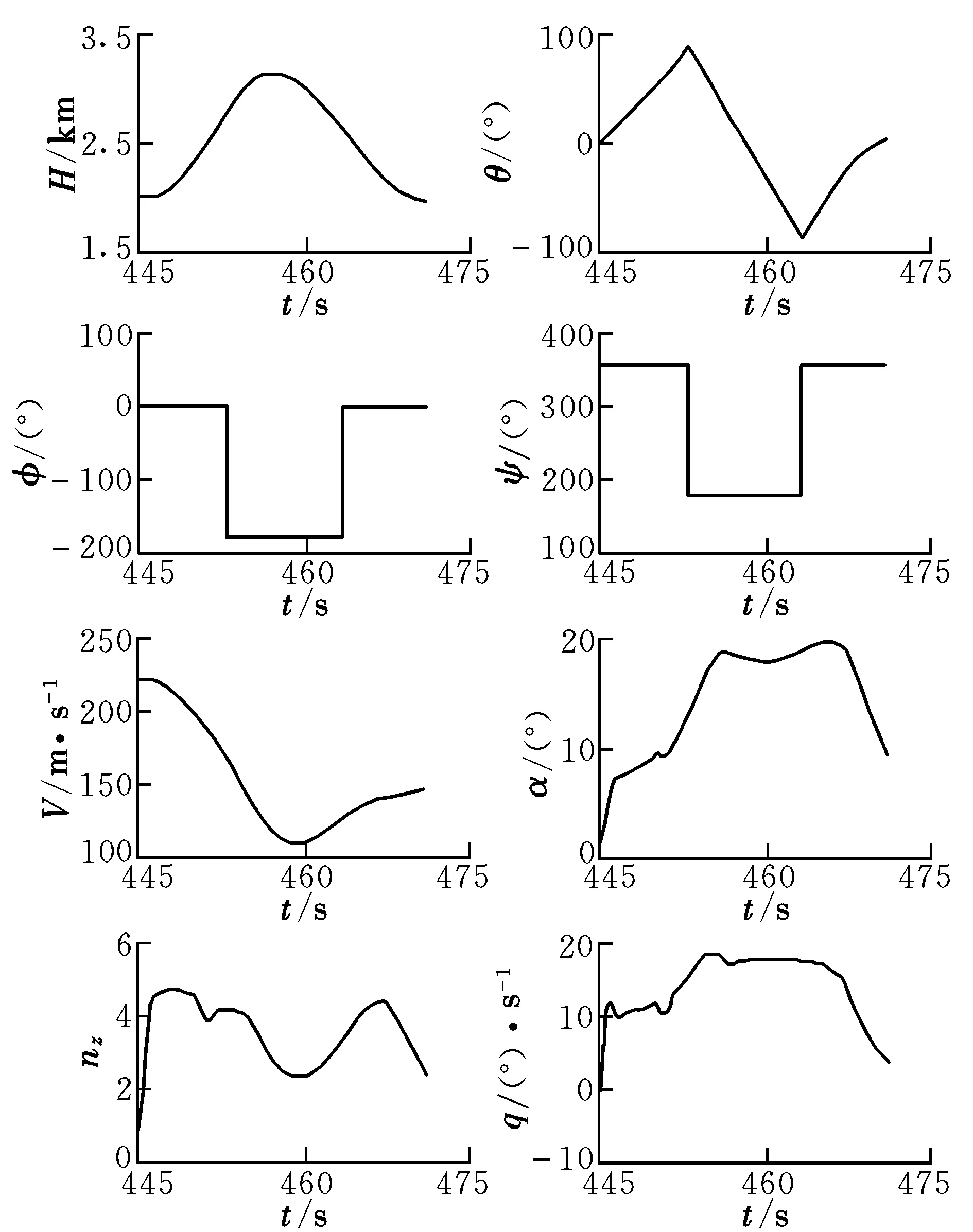
圖4 UCAV筋斗機動仿真曲線Fig.4 Simulation curves of the UCAV’s loop maneuver
5 結束語
本文提出的基于時間最短指標要求的UCAV最優筋斗機動動作實時指令生成算法,不僅可以確保UCAV飛行安全,也可以有效實現筋斗機動的時間最短要求。該算法采用了三自由度的質點機載模型,在減少計算量的同時,獲得了實時性及魯棒性均較強的UCAV過載指令。仿真結果表明,基于時間最短指標要求的UCAV最優筋斗機動動作實時指令生成算法為UCAV筋斗機動動作的實現提供了一種新的思路和方法。
[1] 熊峻江,鄭力銘,肖應超.現代飛行技術[M].北京:國防工業出版社,2011:36-42.
[2] 張翔倫,左玲,楊薔薇.基于機動動作鏈的飛行品質評價方法研究[J].飛行力學,2006,24(3):13-16.
[3] 張翔倫,楊薔薇.平臺自主控制大機動魯棒軌跡生成算法驗證報告[R].西安:飛行自動控制研究所,2004.
[4] 楊薔薇,占正勇.無人機指令生成器設計[J]. 空軍工程大學學報:自然科學版,2010,11(3):21-25.
[5] 張翔倫,楊薔薇.基于機動動作庫的實時軌跡生成與仿真研究[J].飛行力學,2008,26(3):29-32.
[6] 謝蓉,王新民,李儼.超機動飛機動態逆-PID控制器設計[J].飛行力學,2009,27(2):67-71.
[7] Chandler P R,Pachter M.Research issues in autonomous control of tactical UAVs[C]//Proceedings of the American Control Conference.Philadelphia Pennsy lvania,1998:394-398.
[8] 左玲,張新國.用于大機動飛行仿真的四元數改進算法[J].系統仿真學報,2009,21(11):3018-3020.
(編輯:李怡)
Real-time command generator design for UCAV’s optimal loop maneuver
PENG Yong-tao, LIU Lin
(National Key Laboratory of Science and Technology on Aircraft Control,FACRI, Xi’an 710065, China)
A new method based on the shortest time for UCAV’s loop maneuver of path generation method in real time was presented. The optimal trajectory commands with the protection of angle of attack and normal load factor were created in real time by using the UCAV’s three degree of freedom aerodynamic model which had loaded in the computer. In order to reduce the tracking error, classical control methods were used at the same time. Finally, the loop maneuver of UCAV was achieved. Simulation results show that this method has very good real-time performance, and can easily track its path command. Moreover it’s safety for the UCAV’s flight.
UCAV; optimal loop maneuver; real-time maneuver command
2014-06-16;
2014-09-15;
時間:2014-11-18 16:56
彭永濤(1978-),男,陜西寶雞人,博士研究生,研究方向為飛行控制系統及制導系統設計。
V279; V249.1
A
1002-0853(2015)01-0035-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
西安航空學院學報(2014年5期)2014-07-13 01:27:52
