基于滑模速度控制器的PMSM無速度傳感器控制研究*
2016-02-26 01:19:22朱曉虹張廣明韓世東孫明山
電機與控制應用 2016年1期
關鍵詞:永磁同步電機
朱曉虹, 張廣明, 梅 磊, 韓世東, 孫明山
(1. 南京工業大學 電氣工程與控制科學學院,江蘇 南京 211816;
2. 中科院蘇州生物醫學工程技術研究所,江蘇 蘇州 215163)
?
基于滑模速度控制器的PMSM無速度傳感器控制研究*
朱曉虹1,2,張廣明1,梅磊1,韓世東1,孫明山2
(1. 南京工業大學 電氣工程與控制科學學院,江蘇 南京211816;
2. 中科院蘇州生物醫學工程技術研究所,江蘇 蘇州215163)
摘要:針對傳統永磁同步電機(PMSM)矢量控制系統中易受機械式傳感器影響的問題,設計了一套基于擴展卡爾曼濾波器(EKF)的PMSM無傳感器控制系統;同時由于負載突變和系統參數變化會影響整個控制系統的穩定性,提出一種滑模控制器(SMC)來取代傳統PI 速度控制器。首先對PMSM數學模型進行線性化處理,在此基礎上引入EKF算法實現轉速、位置的在線估計,并且設計以轉速誤差作為狀態變量的滑模速度控制器,實現速度環的閉環調節。仿真結果表明,EKF可以有效地對轉子速度、位置進行估算,且在滑模速度控制器的作用下系統響應更快、抗干擾性能更好、魯棒性更強。
關鍵詞:永磁同步電機; 無傳感器控制; 擴展卡爾曼濾波; 滑模控制器
0引言
20世紀80年代以來,隨著各方面相關技術的快速發展,交流電機伺服系統應用變得廣泛。通常對于小容量的調速系統大多選用永磁同步電機。永磁同步電機轉子使用永磁體,省去了勵磁繞組、電刷等,因此結構簡單、運行可靠[1]。為了實現高精度、高動態性能的伺服控制,一般都采用磁場定向矢量控制或者直接轉矩控制。但無論哪種控制方案,都需要轉速閉環,因此大部分情況下需要利用同軸安裝的速度傳感器來測速。但此類傳感器抗干擾性差,又在安裝場所和價格等方面有所限制,因此無速度傳感器技術越來越成為近年的研究熱點[2-3]。諸多學者進行深入研究并提出方法。這些方法可以分為以下幾類: (1) 直接計算法;(2) 基于觀測器的方法;(3) 模型參考自適應控制;(4) 擴展卡爾曼濾波法;(5) 人工智能估算方法。
文獻[4]通過直接計算定子電壓和電流獲得位置角和速度,但該方法依賴于電機的數學模型,需知道電機的參數,因此當電機參數改變時,估算就會有偏差。文獻[5-6]是基于滑模觀測器的方法,滑模觀測器能夠很快地跟蹤速度,同時魯棒性也很強,但開關來回切換就不可避免地會產生抖動,學者們在減弱抖動這方面也做了不少工作。哈爾濱工業大學的張曉光等[7]設計了一種負載轉矩滑模觀測器,將負載轉矩作為擴展狀態變量,以實際轉速和觀測轉速之差構成滑模面,對負載轉矩進行觀測,并將觀測到的負載作為前饋補償,能夠有效削弱抖振。張洪帥等[8]將模糊控制與滑模觀測器結合,實現低速抖振抑制,可以有效地估計電機轉子位置,但模糊控制算法訓練時間長,系統計算變得復雜。文獻[9]提出了一種結合滑模估計器和擴展卡爾曼濾波器(EKF)兩種方法優點的混合估計器,參數調節變得容易很多,低速性能也較好。文獻[10]對傳統EKF算法進行改進,將信息引入到EKF中來修正濾波增益,抑制噪聲變化對辨識結果的影響,能夠對模型參數準確估計,提高了辨識精度。
目前的一些無速度估計算法基本都能得到較為不錯的估計值,但是對于永磁同步電機這個非線性系統來說存在很多不確定因素,例如隨機噪聲等。鑒于EKF算法對噪聲具有非常好的抑制能力,因此本文采用EKF來進行系統狀態估計。根據文獻[5-6]可知,使用滑模觀測器的系統魯棒性更強,因此本文就利用這點將滑模控制器代替PI控制器,切換函數采用飽和函數替代開關函數以減小抖振,滑模算法實現轉速閉環調節,仿真驗證,采用EKF方法是合理的,同時系統調速性能也大為提高。
1永磁同步電機在α-β靜止坐標系下的EKF模型
在構造EKF時通常可以選擇旋轉坐標系或靜止坐標系。若采用旋轉坐標系,卡爾曼程序運算時間較長,不利于實時估計,因此本文使用靜止坐標系來構建電機非線性方程。PMSM在α-β兩相靜止坐標系下的電壓方程為
(1)
機械運動方程為
(2)
式中:Uα、Uβ——定子電壓在αβ軸的分量;
iα、iβ——定子電流在αβ軸的分量;
ωe、ωr、θe——轉子電角速度、機械角速度和轉子電角度,其中ωe=Npωr(Np為電機極對數);
Rs、Ls、ψf——定子電阻、定子電感、轉子永磁磁鏈;
Te——電磁轉矩;
TL——負載轉矩;
B、J——摩擦因數和轉動慣量。

(3)
由此完整的電機非線性方程描述如下:

(4)
y(t)=h[x(t)]+μ(t)
(5)
其中:x(t)=[iαiβωrθe]T,u=[uαuβ]T,y=[iαiβ]T。
對f[x(t)]和h[x(t)]進行線性化可以得到Jacobian矩陣:
(6)
(7)
(8)
2擴展卡爾曼濾波器的設計
由于永磁同步電機數學模型是連續的,在估算之前首先應該將電機數學模型離散化。設采樣周期為Tc,離散化后電機狀態方程為
xk=(1+FTc)xk-1+BTcuk-1+wk-1
(9)
yk=Hkxk+vk
(10)
式中:wk-1——系統噪聲;
vk——測量噪聲。
他們均值為零且兩者互不相關,協方差矩陣分別為Q、R,即Q=cov[w(k)]=E[w(k)w(k)T],R=cov[v(k)]=E[v(k)v(k)T]。
根據EKF遞推公式來實現對永磁同步電機電流、轉速、位置的估算,具體步驟如下。
(1) 根據k-1時刻的輸入值和狀態轉移矩陣,估計k時刻的狀態變量先驗估計值:
(11)
(2) 利用狀態轉移矩陣和k-1時刻估計的誤差協方差矩陣計算本次系統誤差協方差矩陣Pk/k-1:
Pk/k-1=(1+FTc)Pk-1(1+FTc)T+Q
(12)
(3) 根據預測誤差和測量誤差計算增益矩陣:
(13)
(4)k時刻狀態的最優估計:
(14)
(5) 更新最優估計誤差:
Pk=(I-KkHk)Pk/k-1
(15)
EKF算法就是由以上五個步驟遞推運算實現的,需要注意的是系統噪聲協方差矩陣Q和測量噪聲矩陣R的選取將會影響到EKF算法的收斂性,不適當的值可能導致系統發散。本文在前人經驗上進行多次試湊與仿真,最終確定了適合本系統的噪聲矩陣。
3滑模速度控制器設計
滑模控制在狀態空間中為系統設計一個超平面,在不連續的控制規律作用下,迫使系統變換結構,因此滑模控制也叫做滑模變結構控制。其本質就是在控制律的作用下將從任意一點出發的狀態軌跡引導到滑模面,如圖1所示,從而保證系統在滑模面上穩定運動。因此,滑模控制最重要的是確定控制律和滑模面。
圖1 切換面上三種類型運動點
永磁同步電機在dq坐標系下的數學模型:
電磁轉矩方程為
(17)
本系統采用id=0的矢量控制方法,如圖2所示。式(16)結合式(2)、(17)整理可得:
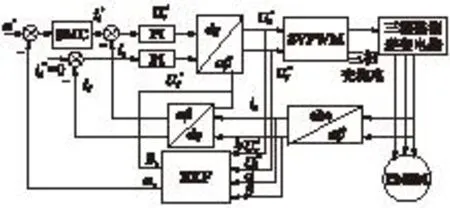
圖2 無速度傳感器PMSM滑模調速系統
(18)
如圖2所示,選擇速度差為狀態變量e=ω*-ωr(ω*為給定轉速),控制量為iq,對轉速誤差求導可得
(19)

(20)
將式(20)整理可得

[(E(t)=Δae+Δbu+d+Δd) ]
(21)
由式(19)可以看出永磁同步電機調速模型為一階微分方程,在設計切換函數時引入了速度誤差的積分項,就可以保證系統在整個滑模動態過程中具有魯棒性。引入積分項的切換函數為
(22)
u=ueq+usw
(23)

(24)
其中:k表示趨近率,即狀態軌跡運動到滑模面的速率;δ表示邊界層厚度,系統在δ鄰域內不需要進行變結構切換控制,變成一種連續的控制,從而消除了滑模面的抖振現象。
在邊界層內,滑模控制器的控制律為
(25)
由上可知s(x)、u+(x)和u-(x)都得到了,因此滑模動態控制系統可以建立,函數切換控制型滑模控制結構如圖3所示。
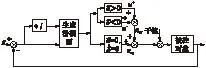
圖3 函數切換控制型滑模控制器結構圖
為了確定設計的切換函數和控制律是否正確,需要驗證滑模的存在性和穩定性。
由式(21)~(23)可得
s[(c+a)e+bu+E(t)]=
s[(c+a)e+b(ueq+usw)+E(t)]=
s[bksat(s,δ)+E(t)]
(26)



(27)

4仿真驗證

圖4是在給定轉速為1000r/min、電機負載為1N起動下電機實際速度和卡爾曼估計的速度。滑模速度控制器的調節加快了進入穩態的時間,估算轉速在0.12s后與實際轉速曲線重合,幾乎沒有誤差。圖5是電機實際轉子位置與估算位置,在起動階段誤差稍大,穩定之后兩者基本重合,可以看出轉角與速度保持了嚴格的積分關系。
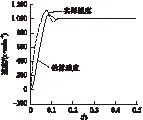
圖4 電機實際與估算轉速波形
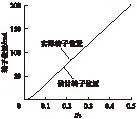
圖5 電機實際與估算轉子位置波形
圖6是轉速實際值和估計值之差。起動時速度差最大接近400r/min,這是因為EKF算法是一種遞推運行的算法,初始值是隨機給定的,所以一開始有估算誤差,但隨著算法的逐步遞推,誤差逐漸變小,最終能夠完全跟蹤實際速度,實現無偏差估計。圖7是電機實際角度和估算角度的誤差曲線圖。由圖7可見,穩定后的誤差值保持在(-0.15,+0.15)之間,進一步證明EKF的收斂性。
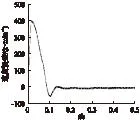
圖6 EKF估計轉速與實際轉速的誤差
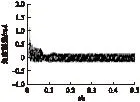
圖7 EKF估算位置與實際位置誤差波形
圖8與圖9是給定指令變化時,對應速度響應的變化。圖8是在0.25s時將速度指令變成700r/min,可以看到經過0.06s之后,速度再次達到了穩定;圖9是在0.25s時突加了5N的負載,一開始速度有所下降,但很快又恢復了給定,是因為滑模控制器的存在才使得系統在系統參數、負載突變時很快恢復原來狀態,系統具有很強的魯棒性。
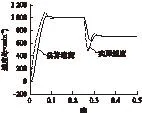
圖8 給定指令變化時速度波形
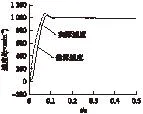
圖9 負載轉矩變化時速度波形
為了更直觀地顯示滑模控制器的優越性,圖10將滑模控制器與PI控制器進行了對比。首先讓電機空載運行,在0.3s時給電機加了8N的負載,由圖10可知,PI控制器進入穩定狀態需要將近0.1s,而滑模控制器很快能夠恢復穩態;圖11為永磁同步電機電機控制系統正反轉仿真圖,轉速參考值先是從0加速到1000r/min,0.25s時改變轉速給定,使之減速到-1000r/min,從圖11中可以看到,PI控制器的動態響應能力不及SMC,再次證明滑模控制器抗干擾性能力強。
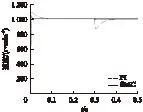
圖10 負載變化時SMC與PI對比曲線

圖11 電機正反轉SMC與PI對比曲線
5結語
本文設計了一套基于EKF的永磁同步電機滑模調速系統。首先搭建了永磁同步電機數學模型,以此為基礎設計以速度誤差及其積分之和為滑模面的滑模速度控制器,從而得到q軸電流。EKF的存在簡化了系統的硬件結構,雖在起動階段估算有所誤差,但由于滑模速度控制器的存在,加快了系統的動態響應,由此EKF算法經過逐步遞推很快能夠達到穩定,幾乎實現無偏差估計。仿真試驗證明該控制方法有抗擾能力強、估計精確等優點。
【參 考 文 獻】
[1]陳振,劉向東,靳永強,等.采用擴展卡爾曼濾波磁鏈觀測器的永磁同步電機直接轉矩控制[J].中國電機工程學報,2008,28(33): 75-81.
[2]孫旭霞,劉博.基于EKF的PMSM無傳感器控制及濾波參數選取[J].微特電機,2011(5): 39-42.
[3]張建軍.基于改進的擴展卡爾曼濾波伺服系統建模技術研究[J].計算機應用研究,2012,29(3): 944-946.
[4]SHOUSE K R, TAYLOR D G. Sensorless velocity control of permanent magnet synchronous motors [C]∥Proc of the 33rd IEEE Conference Decision and Control. 2010: 1844-1849.
[5]邱忠才,王斌,郭冀嶺,等.卡爾曼濾波滑模變結構PMSM位置速度觀測器[J].電力電子技術,2013,47(11): 103-105.
[6]賀宇軒,解小華,張愛春.基于滑模變結構控制的永磁同步電機[J].吉林大學學報: 信息科學版,2015,33(1): 12-18.
[7]張曉光,孫力,趙克.基于負載轉矩滑模觀測的永磁同步電機滑模控制[J].中國電機工程學報,2012,32(3): 111-116.
[8]張洪帥,王平,韓邦成,等.基于模糊滑模觀測器的磁懸浮高速永磁同步電機轉子位置檢測方法[J].電工技術學報,2014,29(7): 147-153.
[9]劉宇,劉杰,戴麗,等.基于滑模估計器和卡爾曼濾波的PMSM速度估計[J].系統仿真學報,2008,20(1): 162-164.
[10]魏彤,郭蕊.自適應卡爾曼濾波在無刷直流電機系統辨識中的應用[J].光學精密工程,2012(10): 2308-2314.
引領技術發展趨勢報道經典實用案例反映行業最新動態
Research on Sensorless Control of PMSM Based on
Sliding Mode Speed Controller
ZHUXiaohong1,2,ZHANGGuangming1,MEILei1,HANShidong1,SUNMingshan2
(1. College of Electrical Engineering and Control Science, Nanjing TECH University, Nanjing 211816,
China; 2. Suzhou Institute of Biomedical Engineering and Technology Chinese Academy of Sciences,
Suzhou 215163, China)
Abstract:A method based on extended kalman filter(EKF)of permanent synchronous motor without position sensor was proposed due to the mechanical sensor problem exiting in traditional PMSM vector control system. At the same time varying load and parameter variations also affect the stability of the whole control system, so a sliding mode controller was used to replace the traditional PI controller. At first, linearizing mathematical model of PMSM,then using extended Kalman filtering algorithm to estimate speed and position, at last, designing speed error as the state variables of the sliding mode speed controller to realize closed-loop control. The simulation results showed that the EKF could estimate the rotor speed and position effectively and system has faster response、better anti-interference performance and stronger robustness under the action of sliding mode speed controller.
Key words:permanent magnet synchronous motors(PMSM); sensorless control; extended kalman filter(EKF); sliding mode controller
收稿日期:2015-07-16
中圖分類號:TM 301.2
文獻標志碼:A
文章編號:1673-6540(2016)01- 0001- 06
作者簡介:朱曉虹(1990—),女,碩士研究生,研究方向為電機控制技術。張廣明(1965—),男,教授,研究方向為智能控制及其應用、機電系統綜合控制、新能源及其控制。
*基金項目:國家自然科學基金(51277092,51307080);國家重大科學儀器設備開發專項項目(2011YQ04008206)
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49