基于MRAS參數辨識的PMSM無速度傳感器控制*
2016-02-26 01:19:31韓世東張廣明朱曉虹劉小俊孫明山
電機與控制應用 2016年1期
關鍵詞:永磁同步電機
韓世東, 張廣明, 梅 磊, 朱曉虹, 劉小俊, 孫明山
(1. 中國科學院 蘇州生物醫學工程技術研究所,江蘇 蘇州 215163;
2. 南京工業大學,江蘇 南京 211816)
?
基于MRAS參數辨識的PMSM無速度傳感器控制*
韓世東1,2,張廣明2,梅磊2,朱曉虹1,2,劉小俊2,孫明山1
(1. 中國科學院 蘇州生物醫學工程技術研究所,江蘇 蘇州215163;
2. 南京工業大學,江蘇 南京211816)
摘要:研究了在無速度傳感器控制條件下,基于MRAS的永磁同步電機參數辨識系統。針對目前多參數在線辨識遇到的欠秩問題,提出了一種固定部分參數分兩步估計電機轉速、定子電阻和永磁體磁鏈的辨識方法,分別推導了同時辨識的參數自適應律,確保參數估計收斂性和唯一性。仿真結果表明: 該控制系統在負載突變下能準確跟蹤轉子的速度,具有良好的魯棒性和動、靜態性能,同時降低了參數敏感性。
關鍵詞:永磁同步電機; 模型參考自適應; 無傳感器控制; 參數辨識
0引言
近年來,永磁同步電機(Permanent Magnet Sy-nchronous Motor, PMSM)在許多高性能調速場合得到了廣泛應用。對轉子位置和速度的準確測量是保證PMSM高性能控制的前提,直接購買的PMSM大多自帶了與電機軸相連的編碼器,無疑增加電機的體積和成本,且這些速度或位置傳感器對溫度、濕度等周圍環境要求較高。因此,無速度傳感器技術成為電機控制研究的熱點問題之一。
目前,PMSM的無速度傳感器技術大致可以分為這幾類: (1) 基于反電動勢(Back-EMF)的方法;(2) 高頻信號注入的方法;(3) 基于狀態觀測器的方法;(4) 基于模型參考自適應(Model Reference Adaptive System, MRAS)的技術。無傳感器控制算法種類繁多,但本質上除(2)外,均是基于PMSM數學模型中參數的方法,這類方法對電機參數極其敏感。無位置傳感器PMSM系統的關鍵技術就是基于電機的準確參數,利用電壓和電流估算出電機轉子的位置和速度。電機參數的準確程度將影響著位置和速度的估算精度,進而直接影響著系統的控制性能[1]。因此,在PMSM無速度(位置)傳感器控制領域,對電機參數(包括: 電子電阻Rs、定子電感Ls、永磁體磁鏈φf)的在線辨識尤為重要。
結合提及的無速度傳感器技術各自的優缺點,本文選擇算法簡單、易于實現的MRAS作為速度辨識算法。MRAS利用兩個不同的模型(參考模型和可調模型)之間的誤差,通過自適應律來估計未知參數,但是同樣存在對模型參數敏感的問題。針對MRAS的這一問題,國內外學者提出了一些解決方案。文獻[2-3]分別采用了不同的可調模型估計轉速ωr的同時,實現了定子電阻Rs的在線估計,一定程度上降低了參數敏感性;文獻[4-5]在有傳感器情況下,分別利用Popov 超穩定理論和Lyapunov穩定性理論構建MRAS自適應律,提出了對電阻、電感、永磁磁鏈的同時在線辨識,但由于電機模型是秩小于3的,其無法保證能獲得唯一解,僅能在特定情況下使估計值收斂;文獻[6]在利用MRAS進行無位置控制中,明確指出定子電阻Rs和永磁體磁鏈φf不可能同時辨識出來;而文獻[7]利用MRAS系統對轉子位置和轉速進行估算,提出基于擴展卡爾曼濾波器(EKF)的PMSM永磁磁鏈辨識方法,很好地避免了上述電機低階狀態方程引起的辨識欠秩問題,降低轉子位置的估算誤差。
在已有文獻取得的進展基礎上,本文提出一種基于MRAS系統分兩步在線辨識PMSM的定子電阻Rs和永磁體磁鏈φf的無速度傳感器算法(包括轉速和位置參數估計)。整個控制系統一分為二,一方面設定永磁磁鏈φf為額定值,在線辨識轉速ωr和定子電阻Rs;另一方面設定定子電阻Rs為額定值,在線辨識轉速ωr和永磁磁鏈φf。辨識參數在線修改電機定子電阻和永磁體磁鏈,確保了電機模型中使用的各項參數的準確性,提高了轉速(位置)辨識的精度。由于采用兩步來進行多參數在線辨識,解決了之前文獻所遇到的電機方程欠秩問題以及多參數估計的交叉耦合問題,確保參數估計收斂性和唯一性,降低了整個MRAS系統的參數敏感性。
1PMSM的建模及參數辨識的欠秩問題
1.1PMSM的數學模型
PMSM在dq軸旋轉坐標系下的電壓方程為
(1)
式中:ud、uq、id、iq——分別為定子dq軸的電壓和電流;
Rs、L——定子電阻和電感;
ωe——轉子電角速度;
ψd、ψq——定子磁鏈在dq軸方向上的分量。
磁鏈方程為
(2)
式中:ψf——永磁體產生的磁鏈,對于表貼式PMSM有Ld=Lq=L。
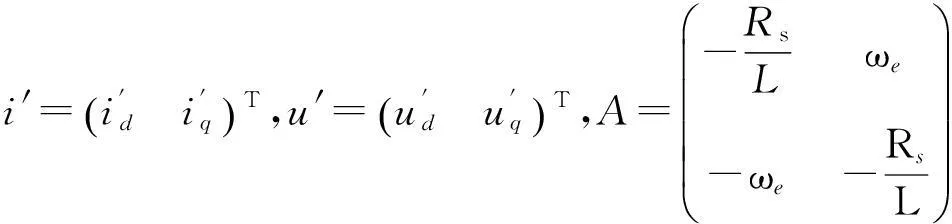
MRAS辨識系統一般將電流作為狀態量,將式(2)代入式(1)并整理得狀態方程為
(3)
1.2PMSM多參數在線辨識欠秩問題的分析及解決方案
PMSM的參數辨識一般圍繞三個電機參數: 即定子電阻Rs、永磁磁鏈φf、電感L。無速度傳感器控制中,估計參數還包括轉速ωr和位置θ。正常工作情況下,溫度上升將導致定子電阻變大和永磁體磁鏈下降,嚴重時甚至出現高溫失磁的現象,嚴重影響電機性能。這導致PMSM無位置傳感器控制非常依賴電機參數的實時在線辨識。但是不對電機施加任何擾動的情況下同時精確辨識永磁體磁鏈和定子電阻,仍然是一個世界難題[8]。
對式(3)做定性分析,PMSM數學模型可以看成2維線性方程組,上文分析電機模型中有5個未知參數,所以方程組欠秩,有解,但不唯一。所以文獻[4-5]的3個及以上參數同時在線辨識只能在特定參數下進行,每次改變算法參數初始值設置必然會獲得不同的定子電阻和永磁磁鏈幅值,其根本原因是因為辨識算法所基于的參考/可調模型是欠秩的。憑借無數個電流電壓采樣值,的確能將多個參數同時辨識出來,但是其結果的收斂性和唯一性缺乏理論依據[8]。
針對多參數辨識的欠秩問題,本文提出部分電機參數設為固定值分步進行辨識。一般情況下,PMSM電感的電壓降誤差遠小于反電勢,磁飽和造成的電感變化對算法的影響相對有限[9],故電感均設為額定值。方案中,一方面固定磁鏈φf,在線辨識轉速ωr和電阻Rs;另一方面,固定電阻Rs,在線辨識轉速ωr和磁鏈φf,使其狀態方程滿秩,確保參數辨識的唯一性和準確性。
2基于MRAS參數辨識的PMSM速度辨識方案

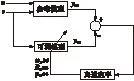
圖1 MRAS轉速估計原理框圖

(4)
簡寫為
(5)
簡寫為
(6)
(7)
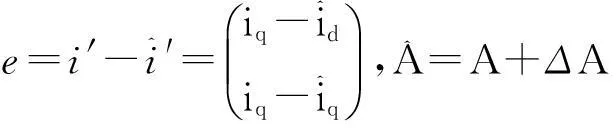
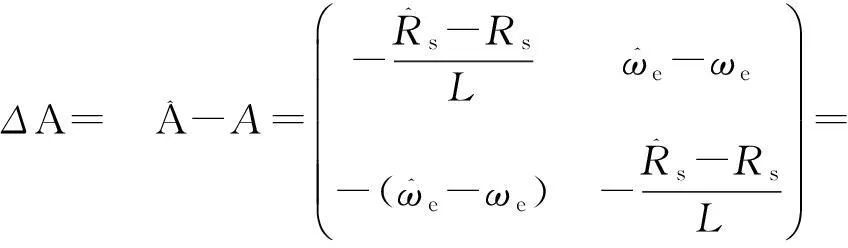
式(6)減式(7)可得誤差方程:
(8)
根據式(8),可得一個標準反饋系統,如圖2所示。其中D為增益矩陣,簡化計算,這里取D=I(單位矢量)。式(3)中,ωe是時變的,但由于機械時間常數遠大于電氣常數,故可認為在每一個采樣周期內,ωe維持不變。所以,圖2上半部分為一線性時不變前饋系統(LTI)。尋找自適應矢量V與反饋矢量W時,先用一個非線性時變反饋系統(LTV)來連接。這樣就得到圖2所示的等效反饋系統。
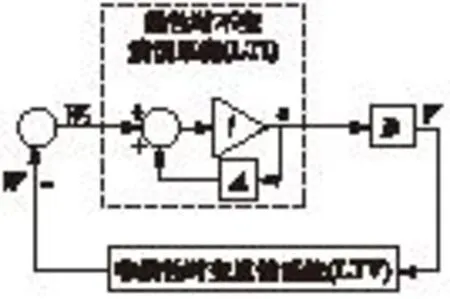
圖2 等效的非線性反饋系統
根據Popov超穩定理論,若系統漸近穩定,則圖2所示非線性時變環節必須滿足Popov不等式[10],即

(9)
式中: γ2——一個有限正數。
(10)
(11)


(12)
(13)
接下來考慮永磁體磁鏈、固定電阻Rs、在線辨識轉速ωr和磁鏈φf,關鍵在于磁鏈φf自適應律的確定。對式(3)進行簡單變換,得
(14)
簡寫為

(15)

(16)

(17)
這樣就分兩步,采用固定部分參數的方法完成了電機轉速、定子電阻、永磁磁鏈的同時在線辨識,基于參數辨識的MRAS轉速辨識系統的結構如圖3所示。
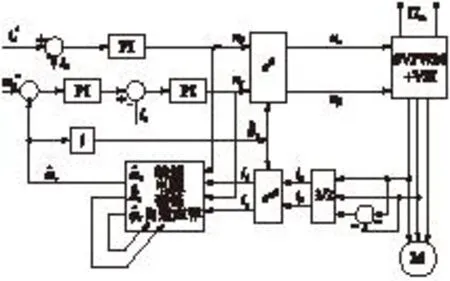
圖3 基于MRAS參數辨識的轉速估計系統結構框圖
3仿真研究
本文利用MATLAB/Simulink來驗證所提出的基于MRAS參數辨識的PMSM速度辨識算法。電機參數如下: 額定功率PN=1.1kW,相電壓220V,定子電阻Rs=0.18Ω,繞組電感Ld=Lq=8.35mH,永磁體磁鏈φf=0.175Wb,轉動慣量J= 0.00062kg·m2,極對數p=1。
仿真試驗中,為了驗證辨識算法在負載情況下的速度跟蹤性能,仿真參數設置如下: 仿真時長0.3s;t=0.15s時,負載轉矩由初始5N·m突變為10N·m。圖4(a)給出了轉速響應波形,可知: 在0.15s負載突變后,經約50ms后轉速又穩定到初始設定轉速。圖4(b)是整個過程中轉速誤差波形,可以看出除起動過程外整個系統轉速誤差很小,突變時誤差也控制在15rad/s以內。圖4(c)和4(d)分別為電阻Rs和永磁體磁鏈φf的在線辨識波形,起動和負載突變階段兩者均有不同程度的波動,但在較短時間內能穩定到實際值。
由仿真試驗可以看出,本文所提出的基于MRAS參數辨識的PMSM速度辨識方案在確保參數辨識收斂性和唯一性的同時,利用辨識結果在線修改電機定子電阻和永磁體磁鏈,能夠較好地完成對轉速辨識和電機轉子空間位置的估計,具有誤差小、跟蹤精度高的特點,估計速度與實際速度基本重合,負載的突變雖產生一定超調,但均能很快恢復,穩態誤差基本為0。仿真試驗驗證了本文設計方案的有效性。
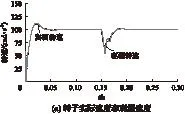
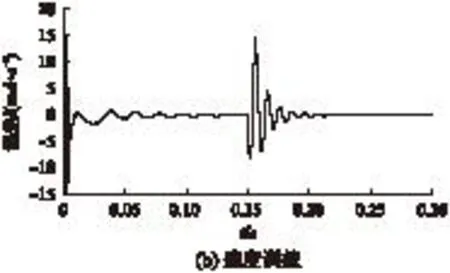
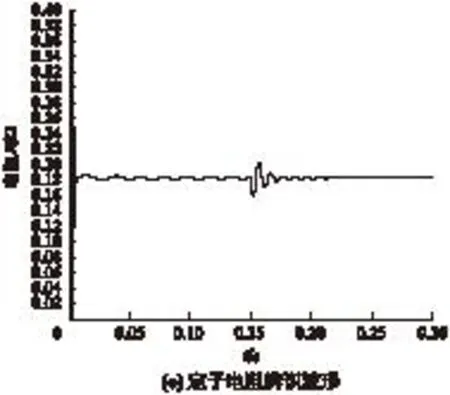
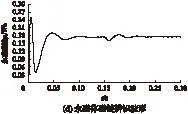
圖4 負載擾動時的仿真波形
4結語
為了降低電機無傳感器控制時的參數敏感性,同時針對多參數在線辨識遇到的電機方程欠秩及交叉耦合問題,本文研究了一種基于MRAS參數辨識的PMSM轉速辨識方案。采用兩步法,解決了由于電機模型欠秩可能導致的估計值不唯一問題。辨識參數在線修改電機定子電阻和永磁體磁鏈,確保了電機模型中使用的各項參數的準確性,降低了MRAS系統對參數的敏感性。仿真結果驗證了所提出的方案在負載突變下均能準確跟蹤轉子的速度,對參數變化具有較強的魯棒性,提高了轉速辨識的精度。
【參 考 文 獻】
[1]周虎.永磁同步電機參數在線辨識算法研究[D].成都: 電子科技大學,2012.
[2]齊放,鄧智泉,仇志堅,等.一種永磁同步電機無速度傳感器的矢量控制[J].電工技術學報,2007,22(10): 30-34.
[3]鄭安平,程福春,張智強.一種改進的永磁同步電機矢量控制MRAS方案[J].鄭州輕工業學院學報,2014,29(4): 46-49.
[4]安群濤,孫力,趙克.一種永磁同步電動機參數的自適應在線辨識方法[J].電工技術學報,2008,23(6): 31-36.
[5]陳振鋒,鐘彥儒,李潔.嵌入式永磁同步電機自適應在線參數辨識[J].電機與控制學報,2010,14(4): 9-13.
[6]RASHED M, MACCONNELL P F A, STRONACH A. Sensorless indirect-rotor-field-orientation speed control of a permanent-magnet synchronous motor with stator-resistance estimation[J]. IEEE Trans Ind Electron, 2007,54(3): 1664-1675.
[7]史宇超,孫凱,馬鴻雁,等.內埋式永磁同步電機永磁磁鏈的在線辨識[J].電工技術學報,2011,26(9): 48-53.
[8]劉侃.永磁同步電機多參數在線辨識研究[D].長沙: 湖南大學,2011.
[9]王子輝.永磁同步電機全速度范圍無位置傳感器控制策略研究[D].杭州: 浙江大學,2012.
[10]王成元,夏加寬,孫宜標.現代電機控制技術[M].北京: 機械工業出版社,2008.
Sensorless Control of PMSM Based on Parameter Identification MRAS
HANShidong1,2,ZHANGGuangming2,MEILei2,ZHUXiaohong1,2,
LIUXiaojun2,SUNMingshan1
(1. SIBET,Chinese Academy of Sciences, Suzhou 215163, China;
2. Nanjing Tech University, Nanjing 211816, China)
Abstract:The parameter identification system of permanent magnet synchronous motor based on MRAS under the condition of speed sensorless control was studied. In order to address the problem of deficient-rank in multi-parameter on-line identification. A two-step method that fixes part of the parameters to estimates motor speed, stator resistance and permanent magnet flux was proposed. The parameter adaptive laws were derived respectively in order to ensure the convergence and uniqueness of the parameter estimation. The simulation results showed that the control system could accurately track the speed of the rotor under the load transient change, and has good robustness, with reduced sensitivity on the parameters.
Key words:permanent magnet synchronous motor(PMSM); model reference adaptive system(MPAS); sensorless control; parameter identification
收稿日期:2015-08-31
中圖分類號:TM 301.2
文獻標志碼:A
文章編號:1673-6540(2016)01- 0007- 05
作者簡介:韓世東(1990—),男,碩士研究生,研究方向為電力電子與電力傳動和電機控制。張廣明(1965—),男,教授,研究方向為智能控制及其應用和新能源及其控制的研究。
*基金項目:國家自然科學基金(51277092,51307080);國家科技支持計劃(2015BAI03B03)
梅磊(1979—),男,副教授,研究方向為飛輪儲能技術,電機起動/發電技術、磁懸浮軸承技術。
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49