基于MSP430F149智能監控的蘋果采摘機器人設計
2016-03-23 06:10:24朱清智
農機化研究 2016年9期
關鍵詞:機器視覺
宣 峰,朱清智,張 毅
(河南工業職業技術學院,河南 南陽 473000)
?
基于MSP430F149智能監控的蘋果采摘機器人設計
宣峰,朱清智,張毅
(河南工業職業技術學院,河南 南陽473000)
摘要:目前,農村勞動力的匱乏,農業機器人代替工人作業已經成為一大趨勢。絕大部分采摘機器人都是以專業的工業PC機為智能控制平臺,所占空間大、功耗高且價格十分高昂,使得智能機器人成本太高,推廣的阻力很大。為此,以MSP430F149為核心處理器,結合機器視覺理論技術,設計了一套智能監控的采摘機器人控制系統,可以實時處理采集到的圖像,指導采摘機器人前進及采摘目標果實。為了實現人機交互工作,設計了LCD顯示電路,可以通過其實時了解采摘機器人的工作狀態,且極大地降低了制造成本。實驗結果表明:該采摘機器人視覺系統識別錯誤率低至3.72%,提高了采摘機器人的可靠性和采摘效率,具有很好的應用前景。
關鍵詞:采摘機器人;MSP430F149;智能監控;機器視覺;人機交互
0引言
隨著智能農業機械方面技術的日益成熟,我國農業生產模式發生了很大的變化,現代科學技術手段和生產工具在農業種植生產模式上的運用逐漸深入,促使我國實現精準化農業,發展農業經濟。智能控制和信息處理技術的快速發展,使得研究人員開始重視農業機器人的研究,使其在農業生產各個領域的應用更加普遍。在水果種植產業中,水果果實的收獲作業相對復雜和繁瑣,勞動力的消耗較大,且果實采摘質量的好壞很大程度影響農戶的經濟收入。在我國,人口老齡化和勞動力的短缺,使得采摘成本較高,且在采摘過程中工人人身會存在安全隱患,因此農業機器人的需求非常急迫。MSP430F149單片機是一款16位超低功耗的混合信號處理器,內部集成了大量模擬和數字電路,外圍電路少,可以提供極其精簡的嵌入式系統方案。為此,設計了基于MSP430F149處理器的智能機器人視覺系統,可實現水果自動化采摘作業。MSP430F149單片機核心開發板和智能監控的采摘機器人如圖1所示。
1視覺系統總體設計
機器視覺技術的功能相當于動物的眼睛,使沒有視覺的機器人能通過攝影機和傳感器做出正確的測量和判斷。該系統通過CCD相機可以獲取豐富的數據信息,MCU會快速處理。因此,在現代自動化技術高速發展的社會中,該技術已經廣泛的用于質量分級、產品質檢、工況監測和植物生長參數檢測等多個領域。機器視覺工作示意如圖2所示。

圖1 MSP430F149核心開發板和智能機器人

圖2 機器視覺工作示意圖
機器視覺結合先進的自動化控制技術和電子信息技術于一體,主要包括鹵素燈光源、光學器件(棱鏡、偏光片、鏡頭、反射器、分光器、漫射片、濾光片)、CCD相機、圖像采集系統、圖像處理軟件及智能控制系統等部分。視覺系統總體構建如圖3所示。

圖3 智控采摘機器人視覺系統總體架構
機器視覺系統將攝像機拍攝的圖片轉化為圖像信號,交給圖像處理系統,獲得物體果實的狀態信息,并依照圖像信號像素分布和色彩,處理成數字信號;MSP430F149處理器將數字信號采用各類精確運算獲知果實物體的特征及三維坐標,并通過判定結果去驅動控制各執行機構。
2目標果實的分割識別
在環境復雜的果林中,機器人想要成功采摘目標果實,最重要的一步是精準地識別目標果實,機器視覺的顏色空間模型算法和圖像處理決定了目標果實的準確分割識別。雙目攝影機拍攝果實的顏色圖像和空間圖像,圖像處理系統根據果實表皮的顏色、形態特征和距離信息確定。
顏色模型指空間顏色坐標的某個能夠看得到的光子集合,是所有顏色域的集合,如圖4所示。RGB就是空間直角坐標系顏色系統的一個單位立方體,控制系統可以統計果實顏色的深度層次進行數據信息儲存,以便圖形處理系統確定果實成熟度。

圖4 RGB顏色模型
該機器人系統利用圖形處理軟件,采用幾何推導法計算出色調、飽和度、亮度,從而推算識別出目標果實及其成熟度。則有

(1)
(2)
(3)
(4)
其中,H為顏色色調;S為顏色飽和度;I為顏色明度。根據3個值的計算及采用面積加權直方圖算法,通過判斷果皮顏色,進而根據水果各個時期的顏色對比,就可以判斷水果是否符合采摘要求。
3控制系統硬件設計
智控采摘機器人需要對采集系統快速處理,以高效敏捷地驅動機器人前行,控制機械手去完成采摘作業。針對這些因素,設計了以MSP430F149為核心控制系統硬件平臺,可完成實時采集信息、處理信息、機器人在現場的自動控制和采摘狀態的實時顯示。該控制系統硬件電路主要包括MSP430F149最小系統、伺服電機驅動、12864顯示及按鍵輸入等電子電路。
3.1 MSP430F149最小系統電路
MSP430F149單片機最小系統是用很簡單的元器件組成一個核心處理器可以正常運行的基本電路,主要包括MCU、振蕩電路和復位電路。其中,振蕩電路包括8MHz和 32kHz兩種振蕩模式,處理器可以根據外圍器件的需要選擇合適的時鐘頻率。其電路原理圖如圖5所示。
3.2 12864液晶顯示電路
12864是一個圖形點陣顯示器,共有128×64個點陣,可以完成圖形顯示,最多能顯示32個漢字,直流5V供電。此系統作為最簡單的顯示功能,主要用來指示采摘機器人當前工作狀態及電池剩余電量,是人機交互的一個窗口。其電路原理圖如圖6所示。
3.3 伺服電機驅動電路
伺服電機主要有扭矩、速度、位置3種控制模式。其中,扭矩形式是通過外部模擬量的輸入來設定電機軸對外的轉矩大小,當外部模擬量設定為大于預設值時電機正轉,反之則反轉;速度形式是通過模擬量的輸入或者脈沖的頻率來進行轉動速度的控制,進行速度模式控制時需要給上位反饋電機的位置信號以做運算用。該采摘機器人需要幾種模式的共同切換控制,來完成機器人的前進及后退、抓取等機械動作。伺服電機電路如圖7所示。

圖5 MSP430F149最小系統原理圖

圖6 12864液晶顯示原理圖

圖7 伺服電機電路圖
3.4 系統電源電路
智能采摘機器人采用5V/5A的鋰電池供電,電池5V輸入電壓經過DC-DC轉換器可以實現5V到3.3V和5V到1.8V的轉換。嵌入式系統MSP430F149處理器供電電壓是3.3V,因外圍電路對處理芯片干擾大,故 DC-DC模塊需加濾波電容減小紋波。MSP430嵌入式模塊需要長期供電,當外部斷電時需要采用電池來給其供電。系統電源電路如圖8所示。

圖8 系統電源電路
嵌入式系統電源電路設計實現的方法有很多種,而電源的很多指標是不可能同時兼顧的,往往需要在效率、噪聲性能、紋波、成本等方面進行折中考慮。處于對成本、效率的的考慮 ,整個系統電源電路采用兩個標準三端線性穩壓器進行DC-DC轉換:一路采用LM1117-33將5V降至3.3V,一路采用LM1117-18將5V降至1.8V。
4控制系統軟件設計
智控采摘機器人控制系統軟件設計主要考慮機械控制驅動的精確性和系統運行的可靠性,采用IAR Embedded Workbench為開發平臺。IAR Embedded Workbench為開發不同的MSP430目標處理器項目提供強有力的開發環境,并為每一種目標處理器提供工具選擇,為開發和管理MSP430嵌入式應用程序提供了極大便利。該系統軟件包括Main主程序和圖片處理、伺服電機驅動、傳感器采集及LED顯示等子程序。系統通過調用各個子程序,控制驅動機器人整體的正常運轉,并根據信息反饋實時修改控制指令。智控采摘機器人控制系統軟件流程圖如圖9所示。
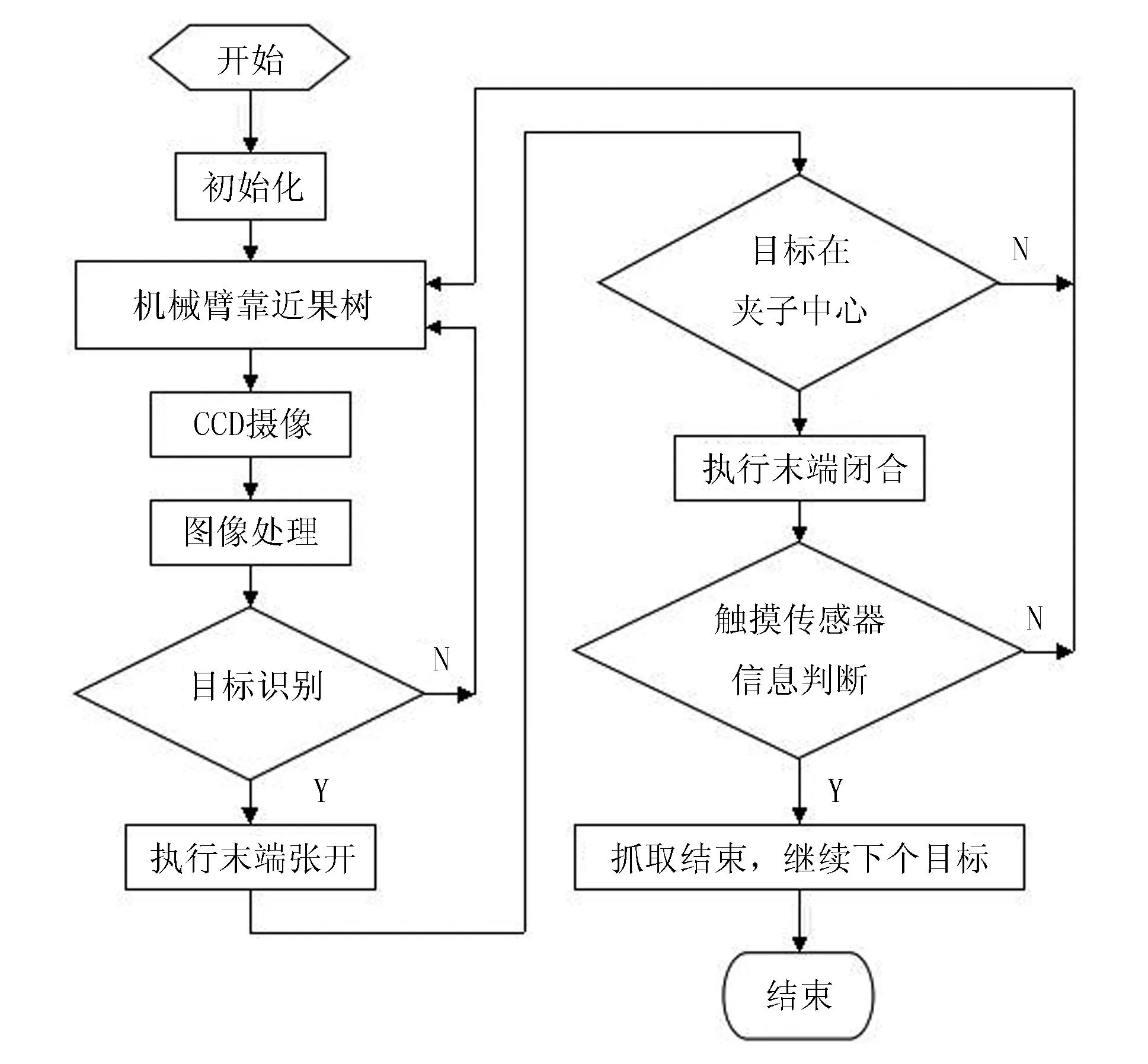
圖9 控制系統軟件流程示意圖
5實驗結果與分析
為了驗證該視覺系統的可靠性,在蘋果林對該系統進行了分割識別實驗。實驗分別在晴天和陰天進行,并以攝像圖離目標物小于250cm和大于250cm拍攝50幅圖片,然后通過圖像處理軟件進行識別。實驗識別結果如表1所示。
由表1可見:在整個識別實驗中,陰天由于光線不強烈,該機器人系統識別正確率較高;攝像機離目標物的距離小于250cm識別正確率也很高,表明機器人系統識別正確率與環境狀況和測試舉例有關。經分析可知,此機器人最低識別率為89.47%,識別正確率較高,可靠性強,符合設計要求。

表1 目標識別結果
6結論
以MSP430F149處理器為核心搭建了水果目標識別系統,采用模塊分類設計法,運用顏色模型對比方式,可以依照園林環境采用合適的方式進行識別作業,系統移植性能強,圖像信息處理速度快,識別正確率高。該智能識別系統對于農業采摘機器人快速識別目標并進行正確采摘作業具有很大幫助,同時還可以大幅度提高采摘效率,對實現果實采摘無人化具有十分重要的意義。
參考文獻:
[1]鄭崢.基于電光采樣的THz-TDS中快速探測技術研究[D].天津:天津大學,2009.
[2]汪嵩杰.基于運動控制器的數控服裝裁剪機控制系統設計[D].杭州:浙江理工大學,2010.
[3]付宗國,王麗.基于ATmega32的遙控采摘機器人設計[J].電子設計工程,2012(4):151-154.
[4]顧寶興,姬長英,王海青,等.智能移動水果采摘機器人設計與試驗[J].農業機械學報,2012(6):153-160.
[5]沈芳,張茂青,嚴震宇,等.基于DSP和VC++的PMSM上位機控制系統的設計[J].蘇州大學學報:工科版,2012(3):45-50.
[6]呂繼東,趙德安,姬偉,等.蘋果采摘機器人對振蕩果實的快速定位采摘方法[J].農業工程學報,2012(13):48-53.
[7]朱亞兵.XF-1495動平衡熱壓專機控制系統的研制[D].武漢:華中科技大學,2008.
[8]李占坤.果樹采摘機器人控制系統研究與設計[D].鎮江:江蘇大學,2010.
[9]方建軍.移動式采摘機器人研究現狀與進展[J].農業工程學報,2004(2):273-278.
[10]張業明.基于PLC的膠輥纏繞包覆生產線自動控制系統研究與開發[D].淄博:山東理工大學,2007.
[11]張玉濤.汽車角度位置傳感器總成測試臺研制[D]. 哈爾濱:哈爾濱工業大學,2013.
[12]戴琨.基于PLC的數控滾壓成型機控制系統研究[D].秦皇島:燕山大學,2012.
[13]蔣公芹.基于軌道車門的面輪廓度自動檢測裝置的設計[D].南京:南京航空航天大學,2009.
[14]張斐.一種變距計量光柵刻劃的分度定位控制系統研究[D].長春:長春理工大學,2011.
[15]宋健.基于圖像的采摘機器人模糊視覺伺服系統研究[J].機床與液壓,2010(10):65-67.
[16]李占坤,趙德安,姬偉,等.基于工業PC機的果樹采摘機器人控制系統設計[J].機械設計與制造,2010(6):142-144.
[17]孟海斌,張紅雨.嵌入式系統電源芯片選型與應用[J].單片機與嵌入式系統應用,2010(12):7-10.
[18]王麗麗,郭艷玲,王迪,等.果蔬采摘機器人研究綜述[J].林業機械與木工設備,2009(1):10-11,14.
[19]宋健,孫學巖,張鐵中,等.開放式茄子采摘機器人設計與試驗[J].農業機械學報,2009(1):143-147.
[20]楊軍艷,劉明.伺服系統在FA1141A型成卷機中的應用[J].山東紡織科技,2009(5):42-44.
[21]胡佳麗,閆寶瑞,張安震,等.S7-200 PLC在伺服電機位置控制中的應用[J].自動化儀表,2009(12):38-41.
[22]戚利勇.黃瓜采摘機器人視覺關鍵技術及系統研究[D].杭州:浙江工業大學,2011.
[23]顧寶興.智能移動式水果采摘機器人系統的研究[D].南京:南京農業大學,2012.
[24]高鵬.六自由度果蔬采摘機器人離線編程系統設計[D].杭州:浙江理工大學,2013.
[25]宋健,孫學巖,張鐵中,等.開放式茄子采摘機器人設計與試驗[J].農業機械學報,2009,40(1):143-147.
[26]番茄采摘機器人末端執行器的硬件設計[J]. 農業機械學報, 2008, 39(3): 109-112.
[27]蔣煥煜,彭永石,申川,等.基于雙目立體視覺技術的成熟番茄識別與定位[J].農業工程學報.2008,24(8):279-283.
[28]謝志勇,張鐵中.基于 RGB 彩色模型的草莓圖像色調分割算法[J].中國農業大學學報,2006,11(1): 84-86.
[29]趙鵬,趙德安.雙目立體視覺在果樹采摘機器人中的應用[J].農機化研究,2009,31(1):212-214.
Design for Apple-picking Robot Based on MSP430F149 Intelligent Monitoring
Xuan Feng, Zhu Qingzhi, Zhang Yi
(Henan Polytechnic Institute, Nanyang 473000, China)
Abstract:At present, as the lack of rural labor,it has become a major trend that agricultural robots are used to be instead of workers. The vast majority of picking robots is a professional industrial PC intelligent control platform, which has a large space, high power consumption,high price and cost, the resistance to agricultural extension. This paper takes MSP430F149 as the core processor, combined with the theory of machine vision technology, it designs a set of intelligent control system for picking robot, which can process the collected images in real time, and guide the picking robot to advance and pick the fruits. In order to realize the work of human computer interaction, the LCD display circuit is designed, and the working state of the picking robot can be understood through its use, and the manufacturing cost is greatly reduced. The experimental results show that the recognition error rate of the robot vision system is low to 3.72%, which improves the reliability and efficiency of picking robot.
Key words:picking robot; MSP430F149; intelligent monitoring; machine vision; human computer interaction
中圖分類號:S225.93;TP273
文獻標識碼:A
文章編號:1003-188X(2016)09-0234-05
作者簡介:宣峰(1981-),男,河南南陽人,講師,碩士。通訊作者:朱清智(1980-),男,河南南陽人,講師,碩士,(E-mail)xuanfeng1981@qq.com。
基金項目:河南省高校重點科研項目(15B535002);河南省高校重點科研項目(14B510011)
收稿日期:2015-08-09
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
