
多旋翼無(wú)人機(jī)的航空攝影測(cè)量技術(shù)在電力測(cè)繪中的應(yīng)用
2016-05-30 10:48:04張政竇杰陳冀渝
科技尚品 2016年7期
關(guān)鍵詞:無(wú)人機(jī)
張政 竇杰 陳冀渝

摘 要:隨著無(wú)人機(jī)技術(shù)的飛速發(fā)展,無(wú)人機(jī)在遠(yuǎn)程遙控、續(xù)航時(shí)間、飛行品質(zhì)上有了明顯的突破,從而為其在電力作業(yè)中的應(yīng)用提供了良好的發(fā)展前景。無(wú)人機(jī)技術(shù)的發(fā)展為架空輸電線路巡檢工作提供了新的平臺(tái),借助無(wú)人直升機(jī),通過(guò)遙感技術(shù)應(yīng)用,采用多傳感器集成的方法,可實(shí)現(xiàn)電力線路安全巡檢工作的高效和全自動(dòng)化開(kāi)展。本文主要以多旋翼無(wú)人機(jī)為研究對(duì)象,通過(guò)分析以多旋翼無(wú)人機(jī)為飛行平臺(tái)的低空攝影測(cè)量技術(shù)的數(shù)據(jù)獲取系統(tǒng)和處理系統(tǒng),研究其在電力測(cè)繪,特別是在電力線路巡檢中的應(yīng)用,為在電力系統(tǒng)線路巡檢、維修等方面提供一定的技術(shù)保障。
關(guān)鍵詞:電力輸電線路巡檢;無(wú)人機(jī);攝影測(cè)量;航空攝影數(shù)據(jù)處理
0 引言
隨著我國(guó)信息科學(xué)和相關(guān)應(yīng)用的快速發(fā)展,我國(guó)各行業(yè)對(duì)空間數(shù)據(jù)的需求也急劇增長(zhǎng)。但目前,對(duì)于空間數(shù)據(jù),特別是高分辨率空間數(shù)據(jù)的獲取渠道仍然局限于國(guó)外遙感衛(wèi)星影像、大飛機(jī)航拍等,造成數(shù)據(jù)重復(fù)采集,資金耗費(fèi)大,數(shù)據(jù)處理工作復(fù)雜,時(shí)效性和靈活性也遠(yuǎn)不能滿(mǎn)足實(shí)際需求。無(wú)人駕駛飛機(jī)簡(jiǎn)稱(chēng)無(wú)人機(jī)(Unmanned Aerial Vehicle,UAV),是一種有動(dòng)力、可控制、能攜帶多種任務(wù)設(shè)備、執(zhí)行多種任務(wù),并能重復(fù)使用的無(wú)人駕駛航空器[1]。無(wú)人機(jī)遙感(UAV remote sensing,UAVRS)是利用先進(jìn)的無(wú)人駕駛飛行器技術(shù)、遙感傳感器技術(shù)、遙測(cè)遙控技術(shù)、通信技術(shù)、POS定位定姿技術(shù)、GPS差分定位技術(shù)和遙感應(yīng)用技術(shù),具有自動(dòng)化、智能化、專(zhuān)業(yè)化快速獲取國(guó)土、資源、環(huán)境、事件等空間遙感信息,并進(jìn)行實(shí)時(shí)處理、建模和分析的先進(jìn)新興航空遙感技術(shù)解決方案[2]。近年來(lái),國(guó)內(nèi)外電力企業(yè)紛紛開(kāi)展無(wú)人飛行器在電力系統(tǒng)線路巡視應(yīng)用的可行性研究,無(wú)人飛行器巡檢線路具有不受地形環(huán)境限制、費(fèi)用與效率之比較高等優(yōu)勢(shì),同時(shí)無(wú)需顧慮其意外墜毀可能導(dǎo)致的機(jī)上人員傷亡等問(wèn)題,因此備受電力行業(yè)的歡迎[3-4]。無(wú)人機(jī)主要包括無(wú)人直升機(jī)、固定翼機(jī)、多旋翼飛行器、無(wú)人飛艇、無(wú)人傘翼機(jī)。廣義地看也包括臨近空間飛行器(20~100千米空域),如平流層飛艇、高空氣球、太陽(yáng)能無(wú)人機(jī)等。從某種角度來(lái)看,無(wú)人機(jī)可以在無(wú)人駕駛的條件下完成復(fù)雜空中飛行任務(wù)和各種負(fù)載任務(wù),可以被看做是“空中機(jī)器人”。在眾多類(lèi)型的無(wú)人機(jī)中,多旋翼無(wú)人機(jī)能夠更有效、更自主、更廉價(jià)地進(jìn)行高分辨率空間數(shù)據(jù)采集,大大降低數(shù)據(jù)采集的經(jīng)濟(jì)代價(jià)和時(shí)間代價(jià),填補(bǔ)了分散小面積高分辨率空間數(shù)據(jù)采集航空攝影專(zhuān)業(yè)的空白。與此同時(shí),基于攝影測(cè)量技術(shù)空間數(shù)據(jù)管理軟件的使用,實(shí)現(xiàn)了無(wú)人機(jī)攝影測(cè)量一體化的整合集成,更加適應(yīng)規(guī)模化電力測(cè)繪生產(chǎn)需要。
1 多旋翼航空攝影測(cè)量
1.1 技術(shù)簡(jiǎn)介
多旋翼低空攝影測(cè)量以多旋翼無(wú)人機(jī)為飛行平臺(tái),是為電力輸電線路測(cè)繪提供更為準(zhǔn)確、快速、直觀的測(cè)繪方法。多旋翼無(wú)人機(jī)攜帶的高清攝像頭所獲取的目標(biāo)區(qū)域航拍影像(圖像)作為輸入,同時(shí)實(shí)現(xiàn)航跡的規(guī)劃和監(jiān)控,通過(guò)計(jì)算機(jī)視覺(jué)、航空測(cè)量學(xué)以及計(jì)算機(jī)圖形學(xué)等相關(guān)算法,快速、精確地對(duì)目標(biāo)區(qū)域場(chǎng)景進(jìn)行三維建模,基于構(gòu)建好的目標(biāo)區(qū)域三維模型,進(jìn)一步完成線路交跨、通道情況等數(shù)據(jù)的測(cè)繪[5]。經(jīng)過(guò)實(shí)際項(xiàng)目檢驗(yàn),可滿(mǎn)足不同航測(cè)項(xiàng)目需求。多旋翼無(wú)人機(jī)低空攝影測(cè)量作為一項(xiàng)空間數(shù)據(jù)獲取的重要手段,具有輕小、續(xù)航時(shí)間長(zhǎng)、影像實(shí)時(shí)傳輸、高危地區(qū)探測(cè)、成本低、高分辨率、機(jī)動(dòng)靈活等優(yōu)點(diǎn),是衛(wèi)星遙感與有人機(jī)航空遙感的有力補(bǔ)充,在國(guó)外已得到廣泛應(yīng)用[6]。而隨著我國(guó)科學(xué)技術(shù)的不斷進(jìn)步,無(wú)人機(jī)低空攝影平臺(tái)的研究 在無(wú)人機(jī)總體工業(yè)設(shè)計(jì)、計(jì)算機(jī)飛行控制系統(tǒng)、組合導(dǎo)航系統(tǒng)、中繼數(shù)據(jù)鏈路系統(tǒng)、傳感器技術(shù)、圖像獲取及傳輸系統(tǒng)、計(jì)算機(jī)數(shù)據(jù)處理等諸多技術(shù)領(lǐng)域都有了長(zhǎng)足的進(jìn)步,達(dá)到了實(shí)際應(yīng)用水平。
1.2 技術(shù)關(guān)鍵點(diǎn)
攝影測(cè)量技術(shù)的主要目的是獲取地物多個(gè)方位的信息并可供用戶(hù)多角度瀏覽,實(shí)時(shí)量測(cè),三維瀏覽等獲取多方面的信息,利用小型化、高可靠性、通用性強(qiáng)的無(wú)人機(jī)航測(cè)系統(tǒng),無(wú)人機(jī)拍攝的圖像,直接構(gòu)建目標(biāo)區(qū)域的三維模型,并提供多種量測(cè)功能;并能夠滿(mǎn)足應(yīng)急、定時(shí)定點(diǎn)監(jiān)測(cè)等無(wú)人機(jī)優(yōu)勢(shì)體現(xiàn)需求。多旋翼無(wú)人機(jī)系統(tǒng),具有載重量大、續(xù)航時(shí)間長(zhǎng)、體積小、重量輕、目標(biāo)特性小,使用快捷、機(jī)動(dòng)靈活、操作使用及維修簡(jiǎn)便等特點(diǎn),自成體系獨(dú)立執(zhí)行飛行任務(wù)。需要解決以下3個(gè)關(guān)鍵技術(shù)問(wèn)題:(1)穩(wěn)定的多旋翼無(wú)人機(jī)飛行平臺(tái)及操控系統(tǒng)。(2)高精度航拍攝像系統(tǒng)。(3)專(zhuān)業(yè)數(shù)據(jù)處理軟件處理航拍數(shù)據(jù)。
1.3 多旋翼飛行平臺(tái)
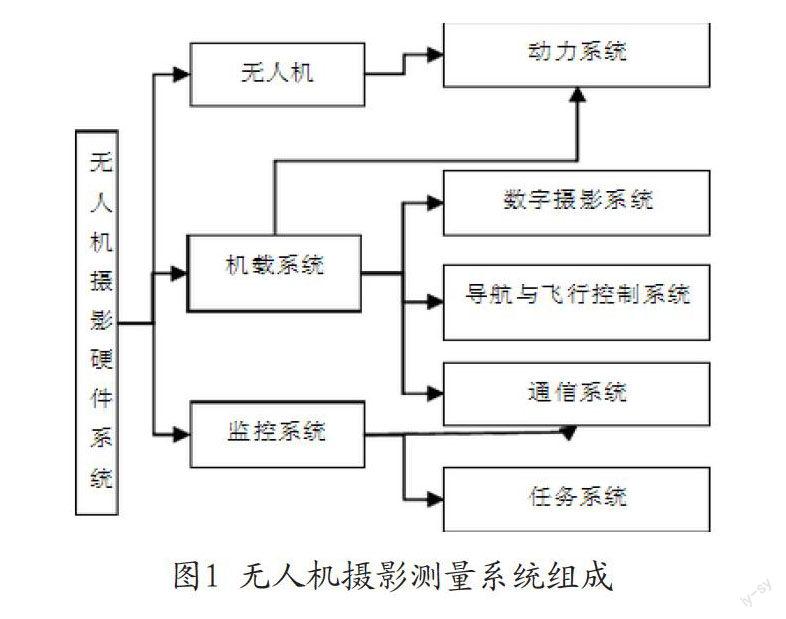
如圖1所示,無(wú)人機(jī)低空攝影測(cè)量系統(tǒng)主要由無(wú)人機(jī)飛行平臺(tái)(如圖2所示)、高分辨率數(shù)碼傳感器、定位與自動(dòng)駕駛系統(tǒng)及影像處理系統(tǒng)等4個(gè)部分組成,提供同時(shí)配合無(wú)人機(jī)的運(yùn)輸及操控的便利性還包括相應(yīng)的地面運(yùn)輸及測(cè)控設(shè)備。(1)多旋翼選用自主駕駛飛控系統(tǒng),大大提高飛控穩(wěn)定性。(2)可攜帶多種任務(wù)載荷。(3)可用于執(zhí)行資料收集、測(cè)量、檢測(cè)、偵查等多種空中任務(wù),在航空測(cè)繪領(lǐng)域能發(fā)揮其高效、機(jī)動(dòng)性強(qiáng)的特點(diǎn),能對(duì)目標(biāo)物進(jìn)行遠(yuǎn)距離監(jiān)視。
2 數(shù)據(jù)采集及處理
2.1 多旋翼無(wú)人機(jī)數(shù)據(jù)采集過(guò)程
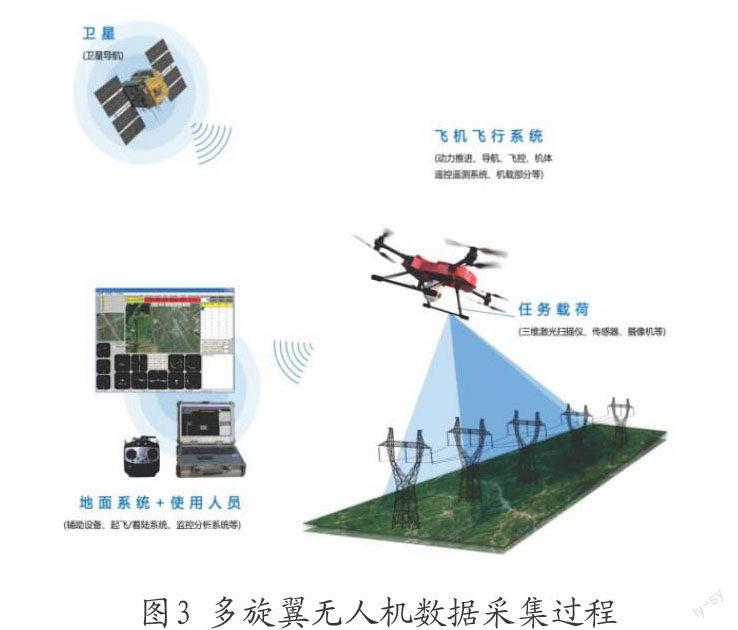
多旋翼無(wú)人機(jī)在數(shù)據(jù)采集過(guò)程中主要通過(guò)飛行控制系統(tǒng)來(lái)進(jìn)行操作,如圖3所示,無(wú)人機(jī)飛行控制系統(tǒng)主要是利用 GPS 等導(dǎo)航定位提供信號(hào),并采集加速度計(jì)、陀螺等飛行器平臺(tái)的動(dòng)態(tài)信息,通過(guò)INS/GPS 組合導(dǎo)航算法解算無(wú)人機(jī)在飛行中的俯仰、橫滾、偏航、位置、速度、高度、空速等信息,以及接收處理地面發(fā)射的測(cè)控信息,用體積小巧的嵌入式中央處理器形成以機(jī)載控制計(jì)算機(jī)為核心的電子導(dǎo)航設(shè)備,對(duì)無(wú)人機(jī)進(jìn)行數(shù)字化控制,使其具有自主智能超視距自主飛行、自動(dòng)進(jìn)行數(shù)據(jù)采集的能力。系統(tǒng)硬件平臺(tái)帶有高清照相機(jī)的小型無(wú)人機(jī),主要負(fù)責(zé)完成目標(biāo)區(qū)域航空影像的拍攝任務(wù)。
2.2 專(zhuān)業(yè)數(shù)據(jù)處理軟件處理航拍數(shù)據(jù)
在獲取航拍數(shù)據(jù)后,如圖4所示,利用專(zhuān)業(yè)的數(shù)據(jù)處理軟件對(duì)數(shù)據(jù)進(jìn)行處理,軟件平臺(tái)為PHOTOSACN和CASSANDRA的基于序列影像的場(chǎng)景快速三維建模以及測(cè)量軟件,該軟件利用無(wú)人機(jī)拍攝的圖像,直接構(gòu)建目標(biāo)區(qū)域的三維模型,并提供多種量測(cè)功能。軟件主要功能如下:
(1)無(wú)需人工干預(yù),系統(tǒng)可以根據(jù)航拍圖像自動(dòng)完成三維建模任務(wù)。
(2)與激光雷達(dá)測(cè)距方法相比具有成本低廉,運(yùn)行速度快(可以達(dá)到準(zhǔn)實(shí)時(shí))、自動(dòng)化程度高等特點(diǎn)。
(3)能夠精確獲取場(chǎng)景尺寸、高程、距離以及面積等信息。
(4)系統(tǒng)可擴(kuò)展性好,可以與現(xiàn)有任何具有圖像采集功能的無(wú)人飛行設(shè)備配合工作。
3 總結(jié)
無(wú)人機(jī)攝影測(cè)量技術(shù)不僅能夠真實(shí)地反映地物情況,而且可通過(guò)先進(jìn)的定位技術(shù),嵌入精確的地理信息、更豐富的影像信息、更高級(jí)的用戶(hù)體驗(yàn),極大地?cái)U(kuò)展遙感影像的應(yīng)用領(lǐng)域,使遙感影像的行業(yè)應(yīng)用更加深入。實(shí)現(xiàn)輸電線路地形數(shù)據(jù)的可視化,根據(jù)已知的電力資產(chǎn)信息建立資產(chǎn)管理數(shù)據(jù)庫(kù),增加三維模型的拓?fù)潢P(guān)系和詳細(xì)的資產(chǎn)信息,實(shí)現(xiàn)電力資產(chǎn)的三維可規(guī)化管理[7]。根據(jù)電塔上的監(jiān)控設(shè)備傳回的數(shù)據(jù),在三維數(shù)字化電網(wǎng)的基礎(chǔ)上進(jìn)行各種專(zhuān)業(yè)電力分析,如預(yù)測(cè)模擬溫度、風(fēng)速、冰雪覆蓋條件下弧垂發(fā)生情況,模擬樹(shù)木生長(zhǎng)情況,為線路管理決策提供有力支撐。
參考文獻(xiàn)
[1]呂厚誼.無(wú)人機(jī)發(fā)展與無(wú)人機(jī)技術(shù)[J].世界科技研究與發(fā)展,1998(6):113-116.
[2]李德仁,李明.無(wú)人機(jī)遙感系統(tǒng)的研究進(jìn)展與應(yīng)用前景[J].武漢大學(xué)學(xué)報(bào)-信息科學(xué)版,2014,39(5):504-513.
[3]于德明,武藝,陳方東,等.直升機(jī)在特高壓交流輸電線路巡視中的應(yīng)用[J].電網(wǎng)技術(shù),2010,34(2):29-32.
[4]邵允臨,曹晉恩,尚大偉.直升機(jī)巡檢華北電網(wǎng)超高壓輸電線路[J].中國(guó)電力,2003,36(7):35-38.
[5]楊寧,李平,楊旭紅.地面無(wú)線測(cè)控網(wǎng)在電力巡檢中的應(yīng)用[J].上海電力學(xué)院學(xué)報(bào),2009,25(1):4-6.
[6]張柯,李海峰,王偉.淺議直升機(jī)作業(yè)在我國(guó)特高壓電網(wǎng)中的應(yīng)用[J].高壓電技術(shù),2006,(6):45-46.
[7]穆超.基于多種遙感數(shù)據(jù)的電力線走廊特征物提取方法研究[D].武漢大學(xué),2010.
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國(guó)科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
