《線性動態系統理論與設計》課程案例化教學改革與實踐
2016-08-19 12:54:21黃景濤邱聯奎
教育教學論壇 2016年31期
黃景濤 邱聯奎


摘要:在碩士研究生的課堂教學中,案例教學起著重要的作用。本文通過總結在線性動態系統理論與設計課程教學的改革與實踐,提煉和設計了直線二級倒立擺系統教學案例,通過系統原理介紹和任務設計,將課程主要內容有機串聯,為學生學習該門課程提供了一個直觀形象的實物載體,結合案例進行課程教學,改變了該課程理論性強、數學味濃帶來的學生學習困難問題,起到了較好的教學效果。
關鍵詞:線性動態系統;教學改革;案例教學;直線二級倒立
中圖分類號:G642.0 文獻標志碼:A 文章編號:1674-9324(2016)31-0085-03
一、引言
線性動態系統理論與設計是電氣工程、控制科學與工程等學科的專業基礎課程,包括清華大學、浙江大學、斯坦福大學、麻省理工學院等國內外重點大學均開設了類似課程。該課程的研究對象是各種實際系統抽象出來的、形式上具有統一性的具有線性屬性的一類動態系統,借助線性代數和矩陣分析的方法,進行系統分析與控制器設計方法的訓練,培養學生對系統進行數學建模、分析與推理能力,使學生具備利用數學工具對控制系統進行理論描述、系統分析和控制器設計的綜合能力[1-3]。
該課程作為控制科學與工程、電氣工程等學科碩士研究生核心課程之一,以往教學過程主要注重基礎理論和基本方法的講授,作為分析工具的數學在教學過程中所占比例較大。隨著研究生教育規模的擴大,根據地方普通高校研究生的現狀,需要在講授基礎理論和基本方法的基礎上,突出相關理論、方法的工程應用背景[4]。
二、教學案例設計
根據線性動態系統理論與設計課程的特點及在學科中的基礎性,教學案例需要在教學過程中結合學生基礎知識及課程基本理論、方法進行選擇與設計。根據多年的教學實踐,本課程選擇典型的直線二級倒立擺作為教學案例。直線二級倒立擺作為典型的機電一體化抽象模型,是人形機器人等實際系統的物理模型。該系統是一個非線性自然不穩定系統,通過該系統可更直觀地展現動態系統的穩定性、能控性以及系統狀態的收斂速度等抽象概念[3]。由于該系統的典型性,已有大量文獻資料可供參考,便于在Matlab/Simulink仿真環境中分析、驗證,結合實驗室原有的物理實驗裝置,可對線性動態系統的分析、綜合進行實際實驗驗證[5]。
(一)直線二級倒立擺物理模型
直線倒立擺是在直線運動模塊上裝有擺體組件,直線運動模塊有一個自由度,小車可以沿導軌水平運動,從而保持倒立擺系統的平衡與穩定,系統組成如圖1所示。為簡化系統,在建模時忽略了空氣阻力和各種摩擦,并認為擺桿為剛體。
其中,M為小車質量,m1為擺桿1的質量,m2為擺桿2的質量,m3為質量塊的質量,l1為擺桿1中心到轉動中心的距離,l2為擺桿2中心到轉動中心的距離,θ1為擺桿1與豎直方向的夾角,θ2擺桿2與豎直方向的夾角,F為作用在系統上的外力。
三、案例化教學方式實踐
結合實例在建立系統狀態空間模型后,可基于該系統模型對系統的能控性、能觀測性等進行分析,在課程內容的運動分析、能控性、能觀測性以及穩定性分析相關的基本理論與方法時,結合該系統進行講解,使抽象的、數學化的理論方法具有明確的物理含義,便于學生理解與掌握相關原理、方法。
1.系統開環仿真。結合該案例,要求學生利用Matlab/Simulink仿真環境建立系統模型,并進行相關算例的編程計算、系統分析。系統的Matlab/Simulink模型如圖2所示。
其中“State-Space”模塊為直線兩級倒立擺的狀態方程,雙擊模塊可打開模型進行參數設定。
建立好系統仿真模型后,對系統進行開環仿真,仿真結果如圖3所示。從仿真結果可以看出,系統發散,為使系統穩定,需要對其添加控制器。
2.控制器設計與仿真。為使系統穩定,需要針對該系統設計閉環控制器,采取狀態反饋的形式進行控制器設計,控制率采用線性二次型最優控制(LQR)方法,仿真模型如圖4所示。根據LQR控制方法的原理,可計算出控制器狀態反饋矩陣的參數為K=[1 73.818 -83.941 2.0162 4.2791 -13.036],仿真結果如圖5所示。
由圖5可見,系統雖然可以穩定,但系統穩定時間過長,根據LQR的基本原理,可知要增加系統響應速度,需增加權重Q的值。
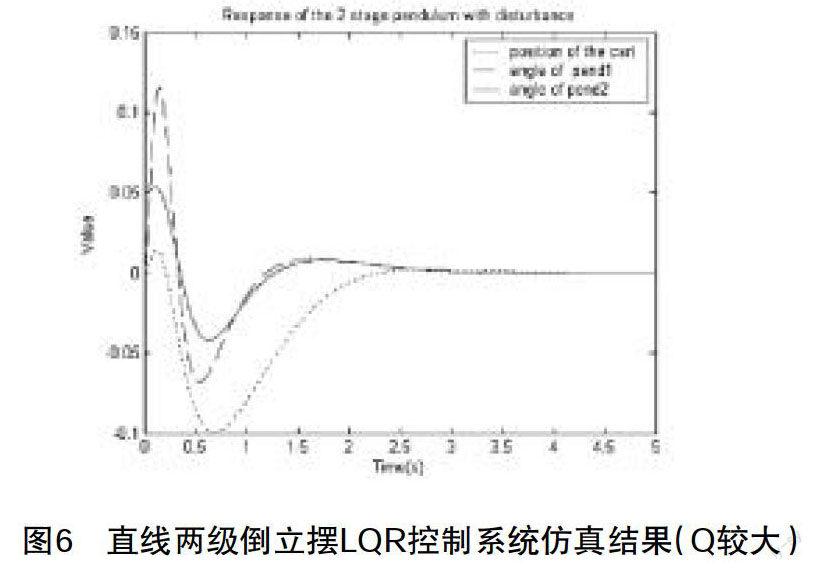
設Q11=300,Q22=500,Q33=500,對應的LQR控制器參數為K=[17.321 110.87 -197.57 18.468 2.7061 -32.142],仿真結果如圖6所示。
由圖6可以看出,系統可以很好的穩定,在給定倒立擺干擾后,系統在2.5秒內可以恢復到平衡點附近。通過對參數的重新設置,觀察仿真結果,進而加深對相應控制方法的理解和掌握。
3.實時實驗驗證。根據上述仿真結果,選取具有較好響應的控制器參數進行實時控制實驗,對比驗證控制方法在實際系統上的控制效果,由于實際系統存在干擾信號、檢測信號噪聲、機械摩擦等實際情況,一般而言,實物系統上的控制效果與仿真結果會有一定差異。
實物實驗驗證在實驗室的直線二級倒立擺平臺上進行,控制算法仍可基于Matlab/Simulink進行。實時控制系統如圖7所示。
四、結論
案例化教學方式的實施,除了教學案例的引入、課程教學組織的變化,學生的深度參與對于教學效果更為重要,在教學過程中要求學生在仿真環境中自行建立系統模型,對系統性質進行分析,在此基礎上,嘗試設計控制器,可覆蓋課程大部分內容,通過案例將各知識模塊和方法有機聯系在一起,使學生進一步明確課程內容對于實際系統的作用,一方面可提升學生學習的目的性、積極性,同時訓練了學生分析問題、解決問題的能力。
參考文獻:
[1]鄭大鐘.線性系統理論[M].第2版.北京:清華大學出版社,2002.
[2]Chi-Tsong Chen. Linear system theory and design,3rd edition. New York:Oxford University Press,1999.
[3]王曉蘭,李恒杰.“線性系統理論”課程教學案例的設計[J].電子電氣教學學報,2013,35(2):21-23.
[4]齊曉慧,王永川,董海瑞.研究生“線性系統理論”課程教學改革與實踐[J].中國電力教育,2010,(32):82-84.
[5]高榮,劉曉華.線性系統理論教學改革探討與實踐[J].中國科教創新導刊,2008,(30):85.
猜你喜歡
科技視界(2016年21期)2016-10-17 18:48:38
科技視界(2016年21期)2016-10-17 18:33:32
考試周刊(2016年77期)2016-10-09 12:16:11
大學教育(2016年9期)2016-10-09 08:13:04
成才之路(2016年25期)2016-10-08 10:03:04
成才之路(2016年25期)2016-10-08 10:00:36
成才之路(2016年25期)2016-10-08 09:51:08
科技視界(2016年20期)2016-09-29 12:59:03
科技視界(2016年20期)2016-09-29 12:10:02
科技視界(2016年20期)2016-09-29 11:38:37
