基于滑模觀測器的永磁直驅風電機組位置自檢測控制
2016-11-17 05:17:23裴玖玲孫少杰
電機與控制應用 2016年10期
關鍵詞:風速
裴玖玲, 孫少杰
(塔里木大學 機械電氣化工程學院,新疆 阿拉爾 843300)
?
基于滑模觀測器的永磁直驅風電機組位置自檢測控制
裴玖玲, 孫少杰
(塔里木大學 機械電氣化工程學院,新疆 阿拉爾 843300)
以消除位置傳感器和開發可靠的轉子位置自檢測技術為目標,提出了一種基于滑模觀測器的兆瓦級永磁直驅風力發電機組位置自檢測方案。該控制策略中,首先根據發電機定子反電勢中蘊藏轉子的位置和速度信息的原理,以估算定子電流與實際電流的理想狀態軌跡設計了滑模面及滑模觀測器,然后根據風電機組的控制目標設計了變流器的機側和網側控制算法。此外,控制對象選為三電平中點鉗位型背靠背全功率變流器,并采用三電平空間矢量調制算法,以減小輸出總諧波含量。最后,基于MATLAB/Simulink仿真平臺搭建了風電機組的仿真計算模型,并進行了仿真計算。計算結果表明,在基于滑模觀測器的轉子位置自檢測控制和變流器網側解耦控制作用下,風電機組實現了最大功率點跟蹤和電能饋送功能,驗證了所提出控制方案的有效性。
直驅永磁同步發電機; 風力發電機組; 中點鉗位型變流器; 滑模觀測器; 自檢測控制
0 引 言
在風電能量轉換系統(Wind Energy Conversion Systems, WECS)中,機組采用永磁同步發電機(Permanent Magnet Synchronous Generator, PMSG)方案,具有結構簡單、功率密度高、可靠性高、維護性好等優點,較雙饋感應發電機和電勵磁同步發電機方案有明顯優勢[1-6]。目前國際上商業化的機型有維斯塔斯3MW的V112機型,愛那康2.5MW的E70機型,金風的1.5MW機型[7-8]。
但在WECS中應用PMSG方案有兩個主要的限制: (1) 需要對轉子的位置進行檢測,以實現最大風能捕獲(Maximum Power Point Tracking,MPPT)控制。這將增加系統的成本和復雜性,并降低可靠性。(2) PMSG需要配合使用全功率變流器。這將導致變流器中功率器件更高的電壓電流應力,而雙饋方案中,一般只需要額定容量30%的變流器即可,特別是當風電機組單機容量的持續增加至10MW級。在現有功率器件容量下,變流器的兩電平拓撲結構將難以滿足設計要求[9-11]。
根據上述分析,為了緩解上述限制,提出了一種基于滑模觀測器(Sliding Mode Observer, SMO)的反電勢自檢測技術,對PMSG的位置進行檢測,從而解決對電機轉子位置檢測傳感器的依賴,提高了系統的可靠性,降低了硬件成本。此外,應用了三電平中點鉗位型(Neutral Point Clamped, NPC)背靠背全功率風電變流器來實現降低功率器件的電壓等級,同時獲取更好的輸出電壓波形質量。本文首先對風電機組進行建模分析,然后引入了基于SMO的位置自檢測控制方法,并設計了三電平NPC背靠背變流器的整體控制策略,最后對控制器進行了仿真驗證。
1 永磁直驅風力發電機組系統建模
配置三電平NPC變流器的直驅風電機組如圖1所示。主要由槳葉和機械系統構成風能輸入端,然后由PMSG輸出電能,經過NPC型背靠背變流器輸出到電網。圖1中還繪出了變流器機側和網側不同的控制功能,機側主要實現基于SMO轉子位置自檢測的MPPT算法,網側主要實現有功、無功輸出控制和直流側電壓控制。
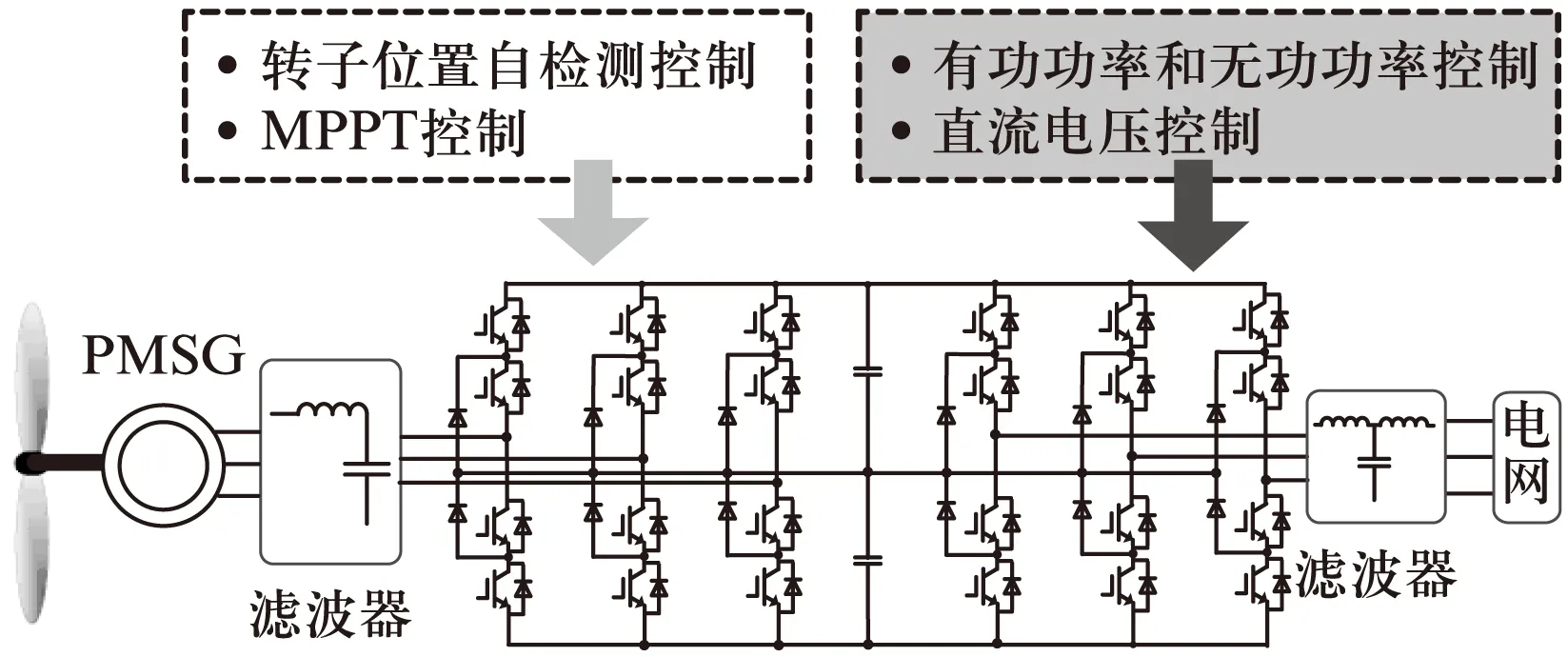
圖1 配置三電平NPC變流器的直驅風電機組
1.1 風機空氣動力學模型
風機捕獲風能轉換為機械功率的表達式為[12]
(1)
λ=ωmr/Vw
(2)
式中:Pw——風機的機械功率;
ρ——空氣密度;
r——風機轉子半徑;
Cp——功率系數;
β——葉片角度;
Vw——風速;
λ——葉尖速比(Tip Speed Ratio, TSO);
ωm——轉子機械角速度。
對于一個給定的槳距角,存在一個最優的TSOλ使得功率系數Cp最大。當風速處于額定值時,槳距角通常控制在0°,以確保風機葉片接受完全的風壓。因此,根據式(2),通過控制轉子速度,可以維持TSO在最優值,使得風機捕獲的風能最大化,這就是基于最優TSO的MPPT算法控制。
1.2 PMSG的數學模型
PMSG的數學模型可用dq坐標系下的動態電壓方程描述[13]:
(3)
(4)
式中:Rs——定子電阻;
uds、uqs、ids、iqs——dq旋轉坐標系下的電壓和電流的d、q軸分量;
Ld、Lq——d軸和q軸定子電抗;
ωe——轉子電角速度;
λr——永磁體產生的峰值相磁鏈。
PMSG的電磁轉矩表達式[13]:
Te=1.5(p/2)(λriqs+(Ld-Lq)iqsids)
(5)
式中:p——極對數。
本文研究對象為表面貼裝式永磁發電機,有Ld=Lq,故式(5)可以簡化為
Te=1.5(p/2)λriqs
(6)
2 基于SMO的轉子位置自檢測控制
先進的交流電機控制算法,例如磁場定向控制(Field Oriented Control,FOC)、直接轉矩控制(Direct Torque Control,DTC)等都需要獲取轉子位置和速度信息[14-15]。獲取位置角信息是用來進行坐標變換計算,速度反饋閉環控制中需要速度信息。通常獲取轉子位置和速度信息的方法是在轉子上安裝轉速編碼器或其他傳感器,但這種方案將在很大程度上增加系統的成本和硬件復雜度。因此,對轉子位置自檢測的方法得到了廣泛研究,而SMO方案是最有吸引力的解決方案,其被引入到了交流電機的參數辨識中,同時其對參數變化和干擾的魯棒性也進行了驗證[16-19]。應用基于SMO的轉子位置自檢測控制以后,位置傳感器將不再在WECS系統中使用。
PMSG在dq坐標系下的狀態空間方程已在式(3)和式(4)中表述,轉換到αβ坐標系下,可以寫為
(7)
(8)
式中:iαs、iβs,uαs、uβs、eαs、eβs——αβ坐標系下的發電機定子電流、定子電壓和反電動勢。
eαs和eβs又可以寫為[20]
eαs=-λrωesinθr
(9)
eβs=λrωecosθr
(10)
根據式(9)和式(10),電機反電勢中包含了轉子位置和轉速信息,即轉子位置角θr和轉子電角速度ωe。這意味著轉子的位置和速度信息可以通過定子反電勢估計得到,而這就是基于SMO的轉子位置自檢測控制的基本原理。具體過程可以描述如下: (1) 通過電壓傳感器測量到電機定子電壓,然后根據測得的電壓和PMSG參數計算出定子電流;(2) 比較計算的定子電流和實際電流傳感器測量得到的定子電流,得到兩者之間的誤差;(3) 根據計算得到的誤差調整SMO的反饋控制輸入;(4) 對反饋控制信號進行濾波估計出反電動勢,從而計算出轉子位置和速度信息。根據文獻[16]中的SMO理論,可以設計PMSG的SMO表達式為[21]
(11)
(12)
(13)
k——開關增益;
sgn()——符號函數。
定義SMO的開關函數為
(14)
(15)
其中開關增益k通常為正,而SMO的滑模面定義為
(16)
從式(16)可看出,滑模面實際上就是估算的定子電流等于實際電流的理想狀態軌跡。但是,這種理想情況只存在于開關頻率無限高的情況,實際上,有限的開關頻率使得觀測器在滑模面領域內振蕩。這通常也稱為抖振SMO。SMO的控制框圖如圖2所示。

圖2 SMO的控制框圖
當開關增益k足夠大到滿足式(17)時:
S·ST<0
(17)
這時將得到滑模面,反電動勢也通過在開關函數輸出設置一個低通濾波器得到,濾波器的具體表達式為
(18)
(19)
式中:ωcutoff——低通濾波器的截止頻率。
(20)
由于低通濾波器導致的相位角偏移可以通過式(21)進行計算和補償,Δθr即為轉子位置角補償:
Δθr=tan-1(ωe/ωcutoff)
(21)
3 WECS的控制系統
對于WECS系統,最主要的控制目標是: (1) 實現PMSG的最大功率輸出;(2) 對注入電網的有功功率和無功功率進行控制;(3) 對風電變流器直流母線電壓進行控制。本文的研究對象為PMSG結合全功率三電平NPC型背靠背變流器構成的WECS系統,發電機和電網是完全解耦的,通過對風電變流器實施控制,可以實現上述三個控制目標。控制系統的框圖如圖3所示。
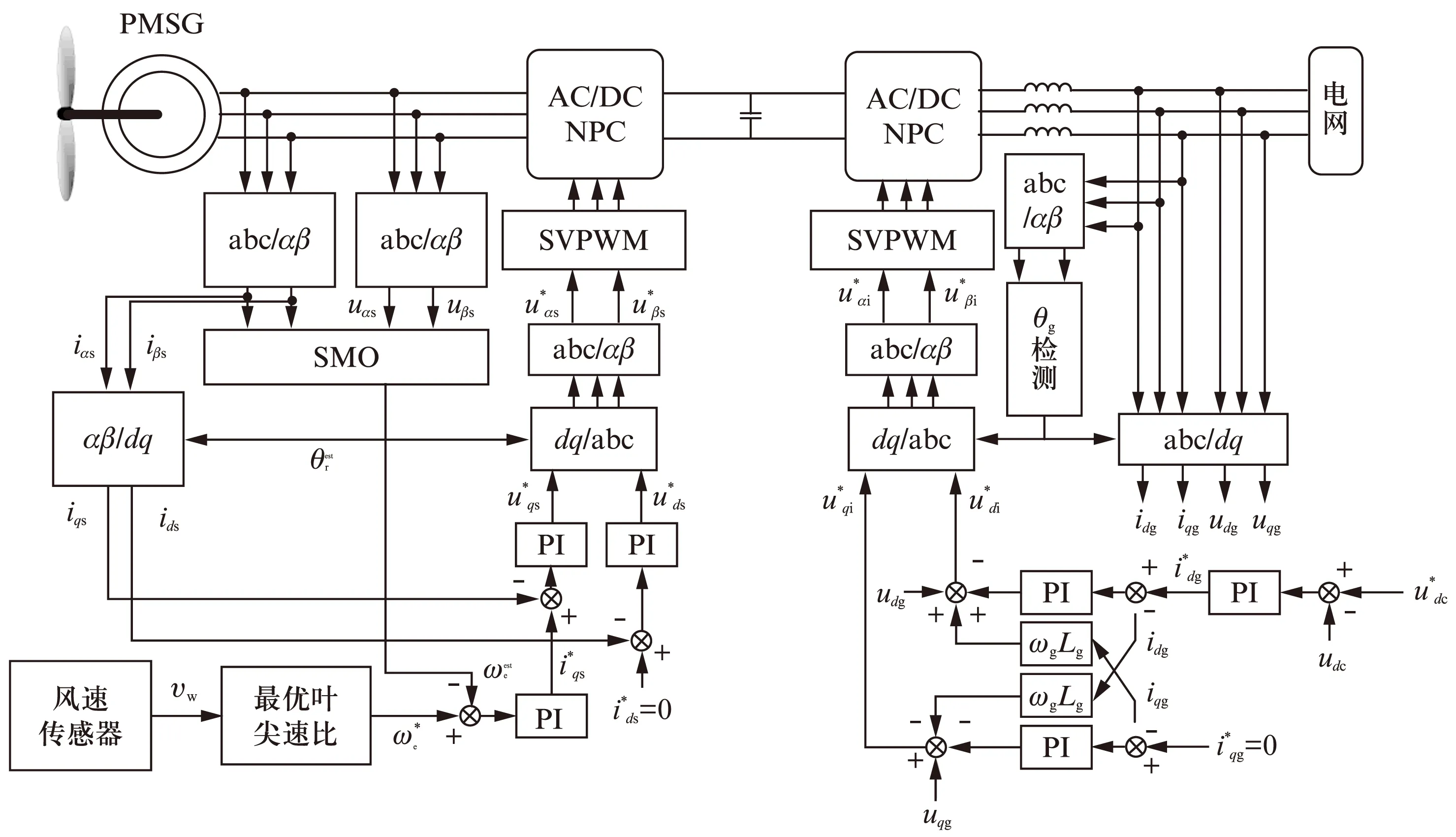
圖3 基于PMSG的WECS系統控制框圖
3.1 最大功率點跟蹤控制
直驅PMSG系統具有較為寬廣的速度運行范圍。為了對PMSG實現最大功率輸出,必須控制PMSG的轉速以匹配不同的風速。基于不同的風速范圍,PMSG被控制工作在三種不同的工況下,如圖4所示。
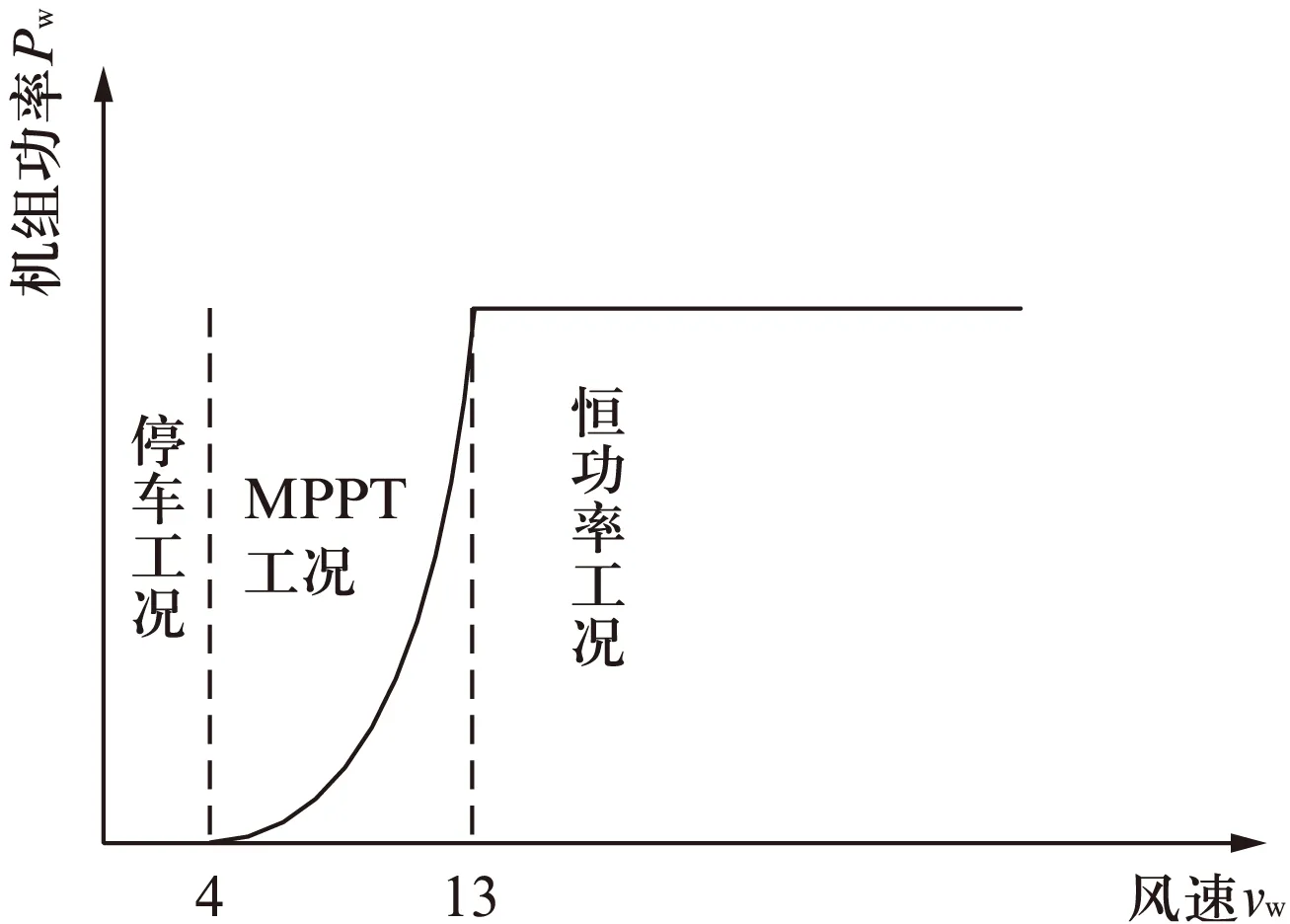
圖4 風電機組的功率與風速關系特性曲線
(1) 停車工況: 當風速低于切入風速4m/s時,由發電機產生的功率不足以補償系統內部各種損耗。因此,風機被控制在停車狀態,機械抱槳系統起動,系統無功率輸出,稱為停車工況。
(2) MPPT工況: 當風速高于切入風速4m/s時,機組開始工作,產生輸出功率。但是此時風速在一個相對較低的范圍內,不大于其額定值,因此WECS系統的輸出功率將小于額定功率。在這種模式下,基于SMO的位置自檢測控制將實現MPPT算法,以保證機組的最大風能捕獲。該模式也稱為MPPT工況。
(3) 恒功率工況: 當風速大于額定風速13m/s時,如果在該情況下應用MPPT算法,將使得機組輸出功率大于額定功率,將導致PMSG和變流器承受超過設計的電應力,此外高轉速也增加了風機的機械應力。因此,需要適當調整槳葉槳距角,使得電機維持在額定轉速,機組也持續地輸出額定功率的能量。該模式也稱為恒功率工況。
3.2 風電變流器機側控制
風電變流器機側控制目標是實現PMSG系統的最大功率獲取。機側采用的是FOC實現轉速跟蹤,其中參考轉速是通過基于最優葉尖速比MPPT算法計算得到的,然后根據SMO估計出轉子速度從而建立起速度控制閉環,同時SMO估計的轉子位置信息還用于FOC算法中的旋轉坐標變換。同時,變流器機側采用空間矢量脈寬調制(Space Vector Pulse Width Modulation, SVPWM)策略,以提高直流母線電壓利用率和較低的總輸出諧波含量。變流器采用三電平NPC型拓撲結構能夠顯著降低功率器件的電壓應力,此外,三電平拓撲結構變流器較之兩電平拓撲結構變流器的輸出電壓總諧波含量較低。
3.3 風電變流器網側控制
風電變流器網側的主要功能是實現能量傳輸,將電能從直流側傳送交流電網,控制注入電網的有功功率和無功功率,同時維持直流側電壓的穩定。事實上,輸送至電網的電能質量很大程度上依賴于變流器網側的控制方案。由于變流器網側控制的主要目標是調節有功功率和無功功率輸送至電網,故首先給出輸出功率的表達式:
(22)
(23)
式中:idg、iqg——dq坐標系下的網側電流;
udg、uqg——dq坐標系下的網側電壓。
從式(22)和式(23)可看出,網側電量是相互耦合的,將影響控制系統的動態響應速度,因此采用一種電壓矢量解耦控制。具體的矢量圖如圖5所示。

圖5 空間矢量控制的矢量圖
從圖5可以看到,電網電壓矢量和旋轉坐標系的d軸同步旋轉。因此,電網電壓矢量q軸分量為零,而電網電壓矢量的d軸分量的幅值大小等于合成矢量幅值大小。解耦之后的有功功率和無功功率的表達式可以改寫為
(24)
(25)
從式(24)和式(25)可以看出,向電網輸出的有功功率可由d軸電流分量直接控制,而并網電流的q軸分量可以用來控制無功功率。這兩者是相互解耦獨立的。在正常的運行條件下,無功功率通常控制在零,以確保變流器網側的功率因數控制在單位功率因數。
此外,基于直流母線電壓和有功功率的關系,即式(24),直流母線電壓可以通過設置一個PI調節器在d軸電流控制環上實現穩壓控制,如圖3所示。
4 仿真驗證
為了證明前述基于SMO的永磁直驅風電機組的位置自檢測控制策略的有效性,基于MATLAB/Simulink仿真平臺搭建風電機組的仿真計算模型,并開展了仿真研究。風電機組的具體參數如下: 系統額定功率2MW,風機額定轉速22.5r/min,葉片半徑34m,極對數52,電機定子電阻和電感分別為0.821mΩ和1.5731mH,變流器直流側電壓設計值1260V,開關頻率1500Hz。
仿真中設置風速的變化過程如圖6所示。風速從4m/s開始逐漸上升至9m/s,然后經過2.5s后,上升至系統的額定風速13m/s。根據風速的變化,可以分析和評估在不同工況和狀態下控制系統的性能。

圖6 仿真中風速變化曲線
PMSG的估計轉速和實際轉速曲線如圖7所示。PMSG的估計轉子位置角和實際轉子位置角曲線如圖8所示。由圖7、圖8可以看出,估計值和實際值很接近,但是也存在一些由于SMO的滑模面存在的固有抖振引起的轉速和轉子位置角的一定范圍內的偏移。
abc坐標系和dq坐標系下的發電機定子電流波形分別如圖9、圖10所示。從圖9、圖10可以看出,發電機定子電流的幅值與風速成正比。這是因為當風速增加時(≤13m/s),PMSG的功率也在增大,從而電流也會相應增加,屬于MPPT工況。
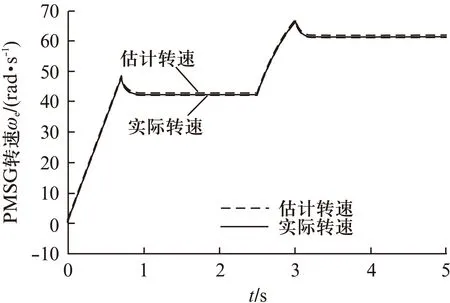
圖7 PMSG的估計轉速和實際轉速
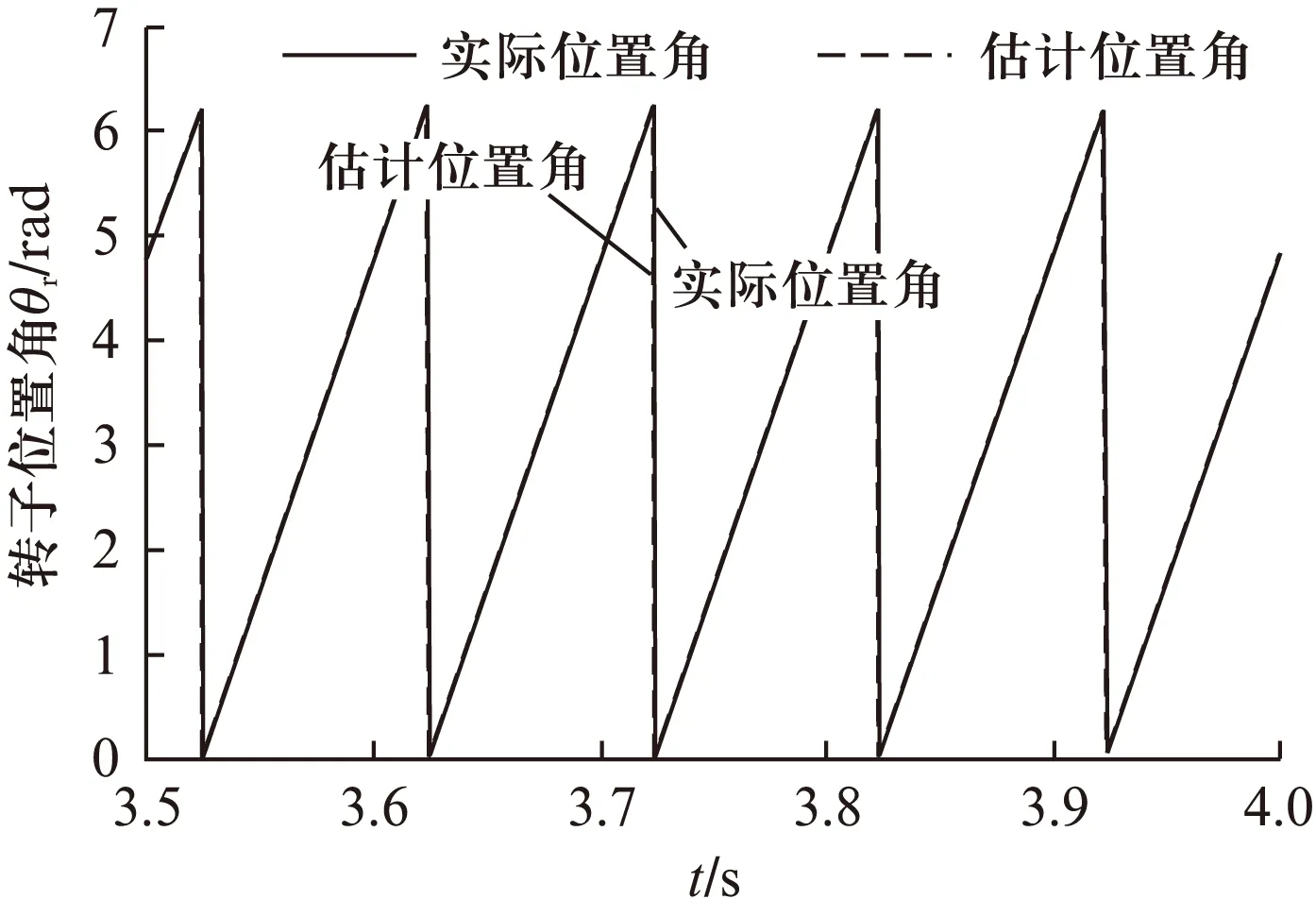
圖8 PMSG的估計轉子位置角和實際轉子位置角
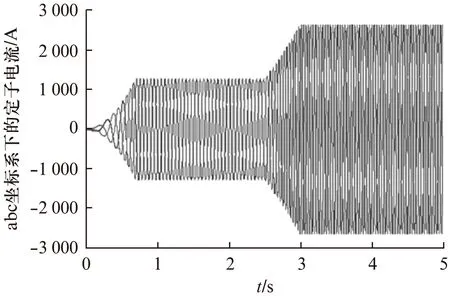
圖9 在abc坐標系下PMSG的定子電流
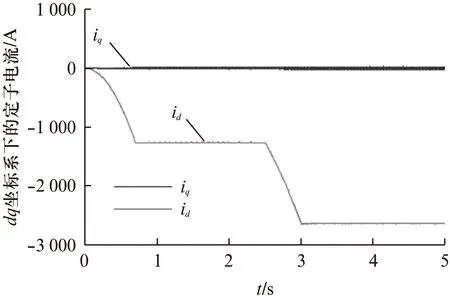
圖10 在dq坐標系下PMSG的定子電流
abc坐標系和dq坐標系下的變流器網側電流波形分別如圖11、圖12所示。從圖11、圖12可以看出,類似于發電機定子電流,隨著風速的增加,輸出到電網的電流也隨之增大。這說明在變流器網側控制規律下,輸出電流隨著風速的變化逐漸送至電網。圖13顯示了系統有功功率和無功功率的輸出曲線。從圖13可以看出,無功功率始終保持為0,即在網側控制律的作用下,變流器網側輸出單位功率因數。此外,有功功率也與風速的變化成正比,在額定工況下,變流器輸出功率接近2MW。
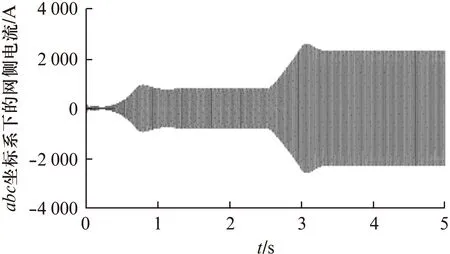
圖11 在abc坐標系下的網側電流
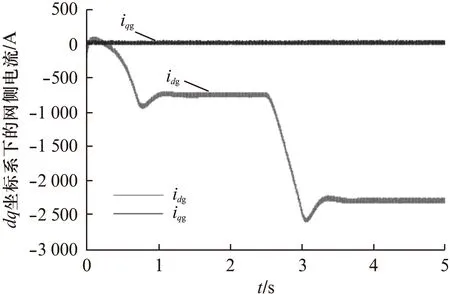
圖12 在dq坐標系下的網側電流
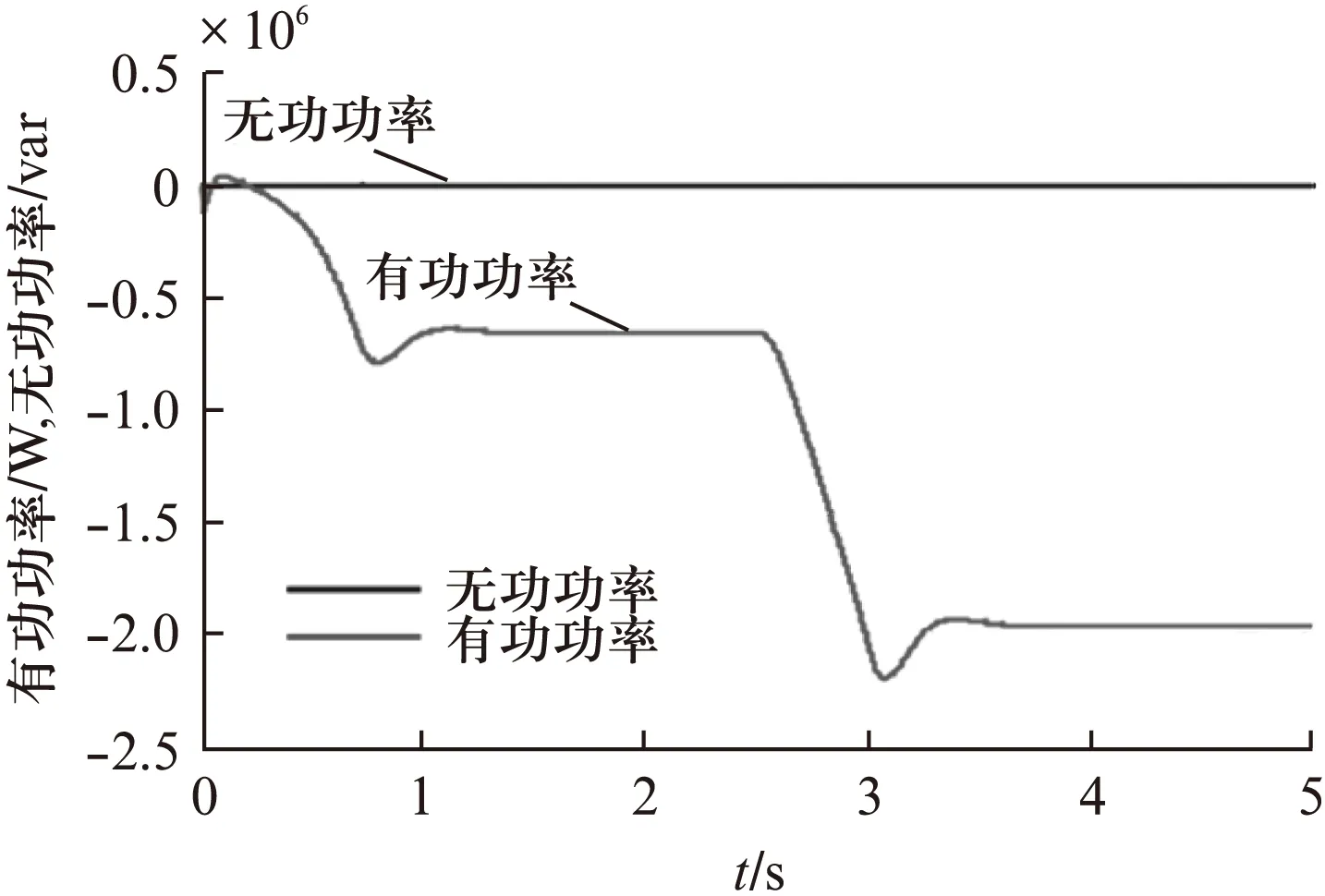
圖13 注入到電網的有功功率和無功功率
變流器機側和網側的輸出線電壓波形分別如圖14和圖15所示。三電平變流器輸出線電壓是五電平的,與傳統兩電平變流器相比,具有較小的輸出電壓諧波總含量。
5 結 語
本文主要圍繞永磁直驅風電機組的位置自檢測控制算法開展了相關研究。其主要途徑是通過設計滑模觀測器來實現發電機轉子位置和轉速估計,首先測量電機定子的輸出電壓和電流,然后通過觀測器反推出轉子位置和轉速,再利用轉速和位置信息實現三電平NPC變流器的機側控制。最后基于MATLAB/Simulink仿真平臺對額定功率為2MW的風電機組進行了仿真計算,并分析了計算結果。現總結主要結論如下:
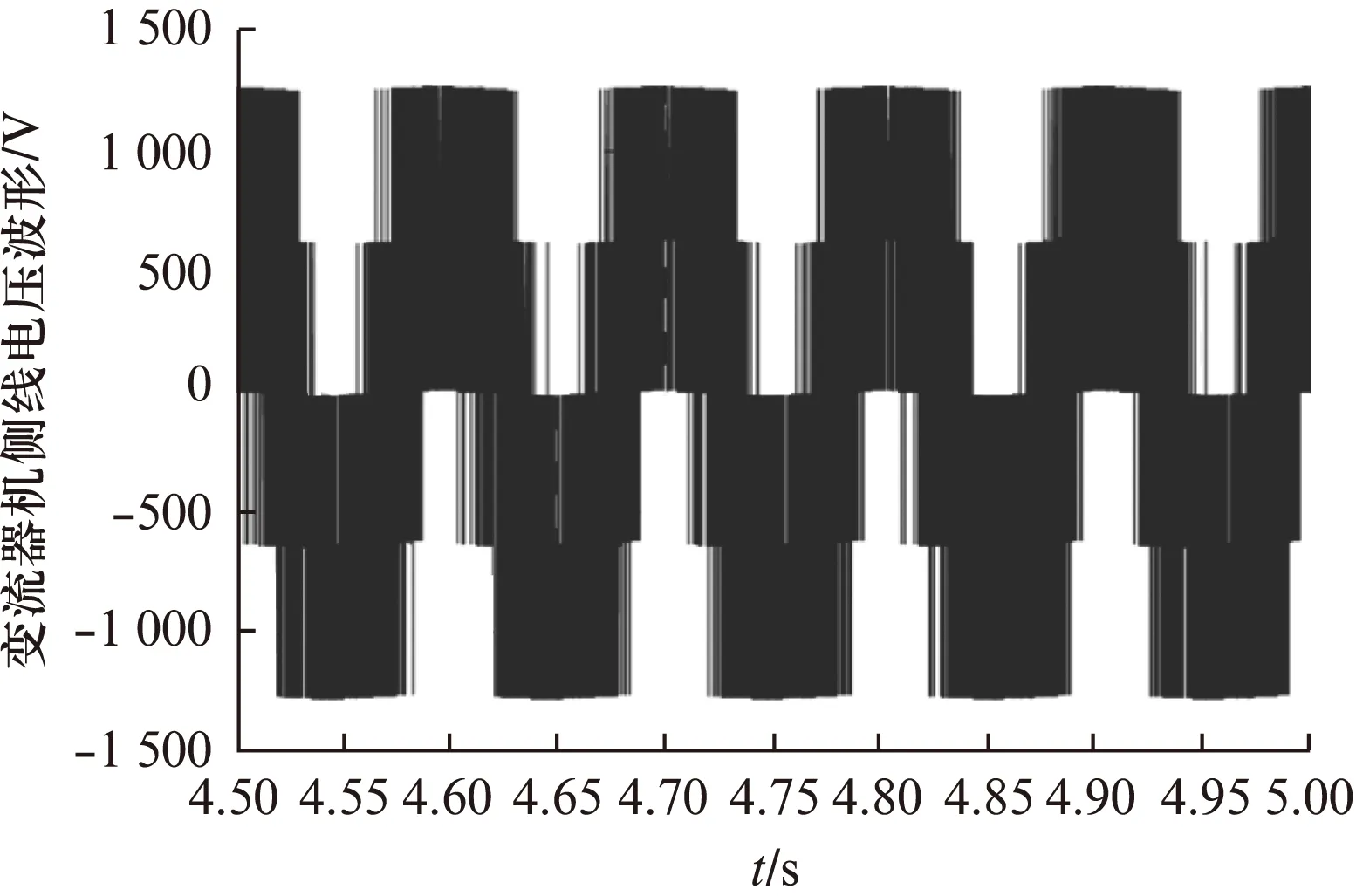
圖14 三電平NPC變流器機側輸出線電壓波形
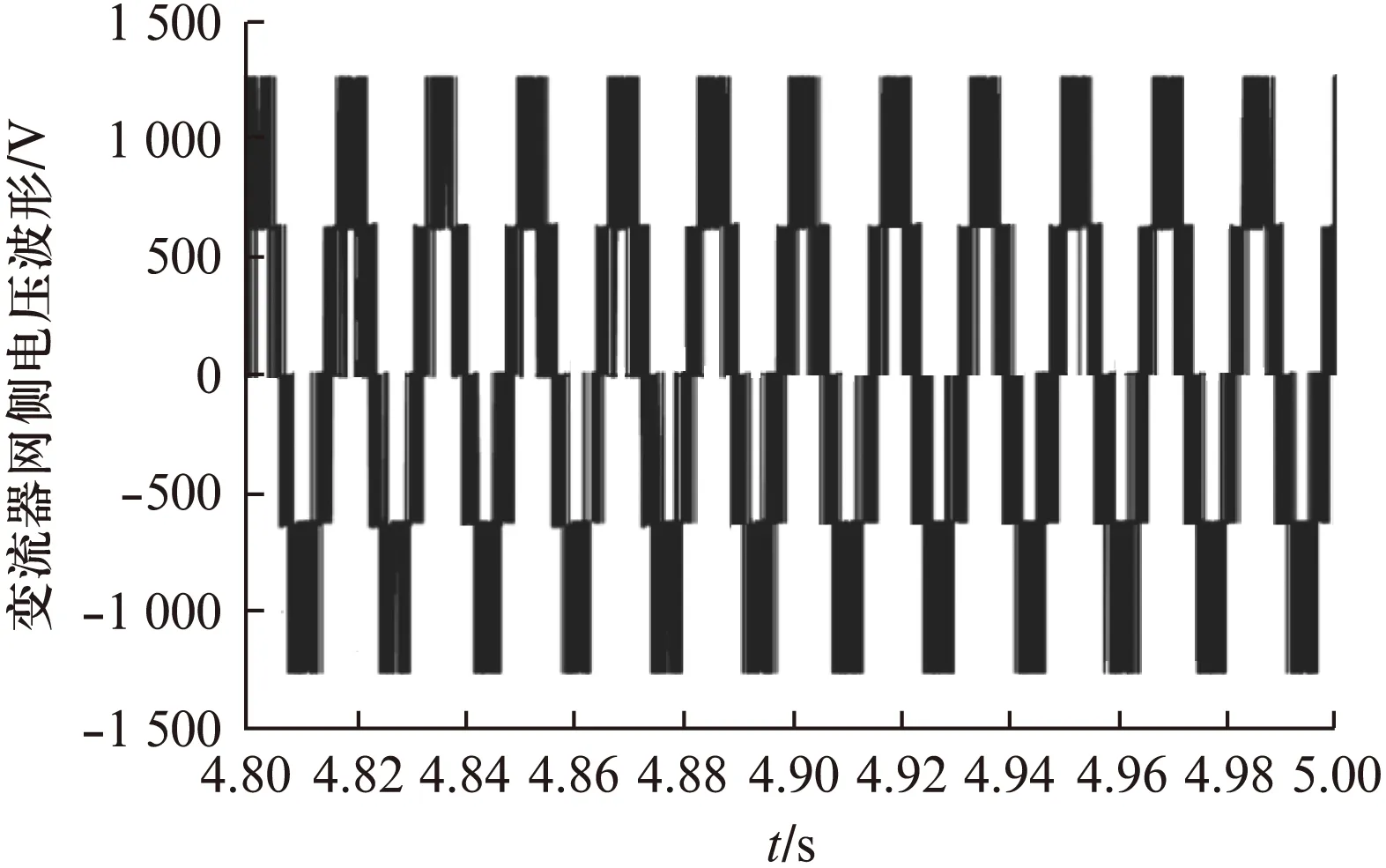
圖15 三電平NPC變流器網側輸出線電壓波形
(1) 提出的基于滑模觀測器的永磁直驅風電機組的位置自檢測控制策略能夠很好地實現機組的風電能轉換,而且不用速度或位置傳感器,提高了可靠性。
(2) 本文中的控制對象為三電平NPC型變流器,但控制策略也可以推廣到其他拓撲結構的變流器,將為風電機組的整體設計提供依據。
[1] 李海波,魯宗相,喬穎,等.大規模風電并網的電力系統運行靈活性評估[J].電網技術,2015,39(6): 1672-1678.
[2] 王志新,吳杰,徐烈,等.大型海上風電場并網VSC-HVDC變流器關鍵技術[J].中國電機工程學報,2013,33(19): 14-26.
[3] 賀軍,張俊洪.風儲微電網運行控制研究[J].電機與控制應用,2015,42(12): 50-54.
[4] 劉波,潘巧波.大型直驅風電機組快速響應控制策略[J].電機與控制應用,2015,42(11): 62-66.
[5] 程啟明,郭凱,程尹曼,等.電網電壓不平衡時DFIG網側變流器新型雙環控制策略[J].電機與控制應用,2015,42(12): 35- 42.
[6] 林鶴云,郭玉敬,孫蓓蓓,等.海上風電的若干關鍵技術綜述[J].東南大學學報,2013,41(4): 882-888.
[7] CHENG K W E, LIN J K, BAO Y J, et al. Review of the wind energy generating system[C]∥ 8th International Conference on Advances in Power System Control, Operation and Management, Hong Kong, China, 2009: 1-7.
[8] FREDE B, KE M. Future on power electronics for wind turbine systems[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2013,3(1): 139-152.
[9] MARCO L, ROBERTO C, MARTA M, et al. Overview of multi-MW wind turbines and wind parks[J]. IEEE Transactions on Industrial Electronics, 2011,58(4): 1081-1095.
[10] YUAN X B. Multilevel modular high power converters for 10MW wind turbines[C]∥ IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 2013: 1-7.
[11] MA K, BLAABJERG F. Multilevel converters for 10MW wind turbines[C]∥ in Proc EPE, Birmingham, UK, 2011: 1-10.
[12] TAPIA A, TAPIA G, OSTOLAZA J, et al. Modeling and control of a wind turbine driven doubly fed induction generator[J]. IEEE Transactions on Energy Conversions, 2003,18(2): 193-204.
[13] 肖園園,李欣然,張元勝,等.直驅永磁同步風力發電機的等效建模[J].電力系統及其自動化學報,2013,25(1): 12-28.
[14] 賈紅云,程明,花為,等.基于死區補償的磁通切換永磁電機定子磁場定向控制[J].電工技術學報,2010,25(11): 48-56.
[15] 王斌,王躍,王兆安.空間矢量調制的永磁同步電機直接轉矩控制[J].電機與控制學報,2010,14(6): 45-26.
[16] YOUNG K. D, UTKIN V I, OZGUNER U . A control engineer’s guide to sliding mode control[J]. IEEE Transactions on Control System Technology, 1999,7(3): 328-342.
[17] UTKIN V I. Sliding mode control design principles and applications to electric drives [J]. IEEE Transactions on Industrial Electronics, 1993,40(1): 23-36.[18] 滕青芳,柏建勇,朱建國,等.基于滑模模型參考自適應觀測器的無速度傳感器三相永磁同步電機模型預測轉矩控制[J].控制理論與應用,2015,32(2): 150-161.
[19] 丁文,梁得亮,羅戰強.兩級濾波滑模觀測器的永磁同步電機無位置傳感器控制[J].電機與控制學報,2012,16(11): 1-10.
[20] KIM H, SON J, LEE J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM [J]. IEEE Transactions on Industrial Electronics, 2011,58(9): 4096- 4077.
[21] KANG K, KIM J, HWANG K B, et al. Sensorless control of PMSM in high speed range with iterative sliding mode observer[C]∥ 9th Annual IEEE Applied Power Electronics Conference and Exposition, 2004:1111-1116.
Position Self-Sensing Control of Direct-Drive Parmanent Magnet Synchronous Generator Wind Turbine System Based on Sliding Mode Observer
PEIJiuling,SUNShaojie
(College of mechanical and electronic, Tarim University, Alaer 843300, China)
In order to eliminate the position sensor and to develop a reliable rotor position self-sensing technology, a position self-sensing control method based on sliding mode observer for the MW permanent magnet synchronous generator wind turbine system was proposed. In the control strategy, because the back electromotive force of the generator stator contains the position and speed information of the rotor, so design sliding surface and sliding mode observer based on the ideal state trajectory of the estimated stator currents and the actual stator currents. Then, design the converter generator side and grid side control algorithm according to the control goal of wind turbine. In addition, the three-level neutral point clamped back-to-back full-scale power converter has been chosen as the control object, and the three-level space vector modulation algorithm has been used to reduce the total harmonic content of the output voltage. Finally, a simulation model of the wind turbine based on MATLAB/Simulink has been built, and some calculations have been done. The simulation results showed that the wind turbine realized maximum power point tracking and electric feed function with the sliding mode observer based position self-sensing control and grid-side decoupling control. So, the feasibility of the proposed control scheme has been proved.
direct-drive permanent magnet synchronous generator; wind turbine; neutral point clamped converter; sliding mode observer; self-sensing control
國家級自然科學基金項目(51477027): 大規模風電柔直并網系統輸電能力評估與源網協調研究
裴玖玲(1980—),女,碩士研究生,講師,研究方向為電力電子、控制工程和新能源發電。
孫少杰(1980—),男,碩士研究生,講師,研究方向為電力電子技術、電力拖動和自動控制。
TM 301.2
A
1673-6540(2016)10- 0082- 07
2016-05-06
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31