智能切換控制器在焦爐鼓風機調速系統中的應用
2016-12-19 11:35:23羅家毅
通化師范學院學報 2016年8期
羅家毅
(安徽工業大學 工商學院,安徽 馬鞍山 243002)
?
智能切換控制器在焦爐鼓風機調速系統中的應用
羅家毅
(安徽工業大學 工商學院,安徽 馬鞍山 243002)
焦爐鼓風機調速系統是集氣管壓力控制系統的重要環節,是煉焦正常生產的重要保證.它具有非線性、時變性、強擾動等復雜特性,常規控制方法很難達到理想的控制效果.設計的智能切換控制器將基于最小二乘支持向量機的內模控制器與非線性PID控制器相結合,根據不同生產工況條件進行切換控制,進而保持初冷器前吸力的穩定.應用于焦爐鼓風機變頻調速系統中,Matlab仿真結果表明該智能切換控制器對于不同生產工況具有良好的調節效果,能夠消除不可測干擾.
智能切換控制;焦爐鼓風機;最小二乘支持向量機;非線性PID
集氣管壓力是煉焦生產的關鍵狀態指標,其大小的穩定不僅直接影響設備壽命和焦炭質量,而且與安全生產和環境問題息息相關.而初冷器前吸力的波動是導致集氣管壓力變化的關鍵因素,一般采用調節鼓風機轉速的方法來改變總管中煤氣的流量和壓力,進而保持初冷器前吸力的穩定,所以焦爐鼓風機調速系統是穩定調節集氣管壓力的主要環節.它具有非線性、時變性、強擾動等復雜特性,不僅難以準確獲得被控對象的數學模型,而且極大增加了控制器設計的難度和控制算法的復雜程度,傳統、常規、單一的控制方法很難達到理想控制效果,需要結合計算機控制技術進行先進的智能控制.
早期在集氣管壓力系統中多使用傳統PID,無法同時滿足調節快速和降低超調的要求,控制效果差[1];2000年早期,陽春華教授采用PID控制器調節多個集氣管翻板開度,采用專家控制器調節鼓風機的轉速,采用前饋控制器補償對于翻板動作或轉速變化帶來的干擾,多種控制器并用[2];北科大舒雄鷹以PID控制為基礎,結合專家系統設計了一種可以按現場生產情況進行智能切換的控制算法[3];近年,張世峰等人提出一種基于RBF神經網絡辨識的單神經元控制器與PID控制器相結合的方法[4].
以上控制方法各有優劣,但是做出了許多有益的新嘗試,在此基礎上,本文針對焦爐鼓風機變頻調速系統提出了一種智能切換控制器.該智能切換控制器可以根據現場生產的不同工況自動選擇不同控制器,在正常工況下選擇投入基于最小二乘支持向量機的內模控制器(LSSVM_IMC)在線跟蹤被控對象模型,實時調整控制器參數,可有效抑制未知干擾帶來的影響,快速恢復系統穩定;在非正常工況下切換采用非線性PID控制器,針對不同的操作工況產生的強干擾,PID控制器自動調整不同參數,以快速消除系統干擾,通過穩定初冷器前吸力進而實現集氣管壓力的穩定[5-6].
1 焦爐鼓風機調速控制系統結構
某焦化廠有1#、2#兩座焦爐,鼓風機調速系統工藝流程如圖1所示.兩座焦爐產生的荒煤氣經四根集氣管匯集到煤氣總管,總管內的煤氣經氣液分離器分離后經初冷器冷卻,再經鼓風機加壓后一路經回流管回到初冷器前的煤氣總管,一路送到下道工序進行處理,處理完后送給用戶.使用變頻器進行鼓風機調速控制主要是通過鼓風機的轉速變化來改變煤氣總管中的煤氣流量和壓力,來保證在不同干擾情況下初冷器前吸力的快速穩定,因為初冷器前吸力與焦爐集氣管壓力緊密相關,其變化將直接反應集氣管壓力的變化.
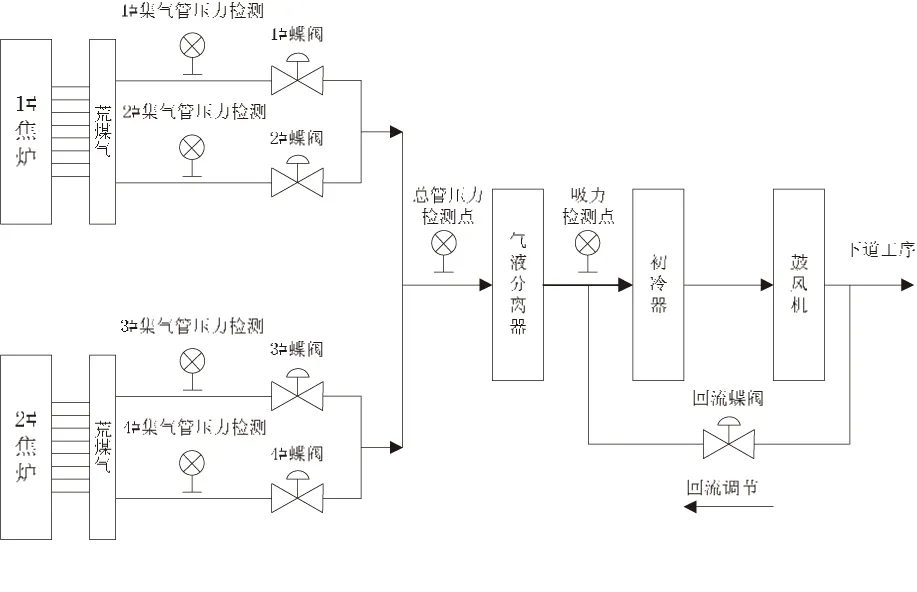
圖1 焦爐鼓風機調速系統工藝流程
一般來說,煉焦生產過程可以分為正常工況和非正常工況兩種情況,大部分生產期間屬于正常工況,集氣管壓力隨著煤氣總量的變化而上下波動,此時需要一種具有很好魯棒性、并能適應鼓風機系統復雜動態特性的智能控制策略;而當進行推焦、裝煤、換向加熱、開關氨水等一些人工操作時,系統會產生較大幅度的強烈擾動,稱為非正常工況,此時則需要快速消除誤差、恢復穩定.針對兩種工況條件,本文采用的智能切換控制器能夠在正常工況下自動選擇LSSVM_IMC,在非正常工況下切換采用非線性PID控制器,兩者通過復合切換相互協調控制,從而穩定調節輸出.現以鼓風機變頻調速系統作為研究對象,其智能切換控制器的系統結構如圖2所示.
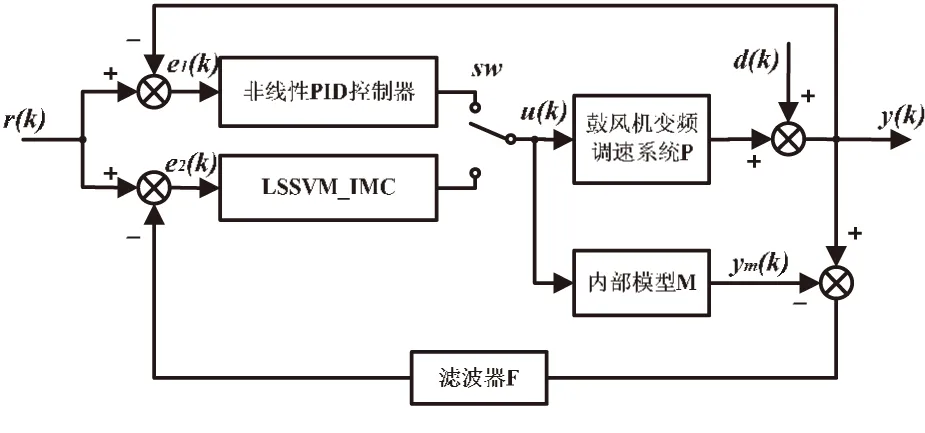
圖2 智能切換控制器結構
圖2所示控制結構包括非線性PID控制器和LSSVM_IMC、系統被控對象P、內部模型M和反饋濾波器F.其中,該智能切換控制器取初冷器前吸力為被控量y(k),鼓風機變頻器輸出頻率為控制量u(k),其他壓力檢測點的壓力變化、人工操作引起的壓力波動等其他對被控量的各種影響視為干擾d(k),初冷器前吸力的設定值r(k)大小是根據生產工況不同分段設計的,ym(k)是LSSVM_IMC內部辨識模型的輸出,sw為兩種控制器的切換開關,切換條件是根據吸力設定量與被控量的差值進行比較得到,反饋濾波器F是當內部模型與被控對象失配時,被引入用來改變系統的結構和參數從而增強內模系統的穩定性,這里選用一型濾波器用于內模控制的反饋通道中.
2 智能切換控制器設計
2.1 正常工況下LSSVM_IMC設計
實際煉焦生產的大部分情況屬于正常工況條件,該煉焦廠在正常生產時,通過采集l組變頻器控制量和初冷器前吸力大小為輸入輸出數據對,構成訓練樣本集{(u(k),y(k)),k=1,2,…,l} .利用LSSVM建立系統觀測器,把u(k)和y(k)作為觀測器的輸入量,再通過LS_SVM辨識得到的內部模型M在輸入量為u(k)時得到內部模型輸出量ym(k),將ym(k)與y(k)的差值Δym(k)作為模型修正量與吸力設定值r(k)比較.LSSVM_IMC的觀測器輸入量的向量形式為:
(1)
X1,X2,…,Xl為觀測器從k時刻到k-n+1時刻的輸入向量,而y1,y2,…,yl為系統輸出給變頻器從k時刻到k-n+1時刻的控制量,從而得到鼓風機變頻調速系統的模型訓練樣本集為:
{(X1,y1),(X2,y2),…,(Xl,yl)}?Rn*Rn
(2)
用非線性函數φ(x)把得到的輸入向量映射到一個高維特征空間,在該高維空間上建立最優化決策函數:
y=f(x)=wT·φ(x)+b
(3)
式中b為偏移量,w為權向量.在LSSVM中目標優化函數和約束條件為:
(4)
s.t yk=wT·φ(xk)+b+ξk,k=1,2,3,…,l
(5)
式中γ為調整參數,它的取值可以兼顧模型復雜程度和訓練誤差,使得所述問題中的目標函數能有較佳的泛化能力.引入Lagrange函數:
(6)
通過KKT條件可以獲得最優的a和b.
(7)
通過消除ζ,w,所述的優化問題便可以簡化為如下線性方程的求解問題:
(8)
其中,y=[y1,y2,…,yl]T,Il=[1,1,…,1]T,a=[a1,a2,…,al]T.因此利用LS_SVM建立的觀測器為:
ym(k+1)=f[X(k)]=wφ[X(k)]+b=
(9)
建立好鼓風機變頻調速系統的觀測器后,還需要確定鼓風機調速系統的逆模型,這里把被控對象看作為一個SISO系統:

(10)

(11)
內模控制器的建立就是需要確定式(11)中g(·)函數的表達形式和具體參數.首先確定內模控制器的輸入向量的形式為:

(12)
對式(10)所示系統,采用LSSVM逼近其逆模型,其計算方法與以上辨識內部模型的方法相同,得到的逆模型即為式(11)的逼近式,可表示為:

(13)

在正常工況下采用LSSVM_IMC控制方法,能夠將鼓風機變頻調速系統變成一個動態的偽線性被控對象,即實現了把被控對象的非線性變為線性這一過程,極大地減小了控制難度和算法復雜性[7-8].
2.2 非正常工況下非線性PID控制器設計
非正常工況下初冷器前吸力的擾動劇烈,采用非線性PID能夠快速消除強干擾.非線性PID控制各調節參數都可以根據偏差大小的不同作非線性變化,使用更為靈活.非線性PID控制器在工業計算機控制過程中常使用離散化后的改進公式,即:
u(k)=KP(e(k)-e(k-1))+KIe(k)+
KD(e(k)-2e(k-1)+e(k-2))
(14)
式中,u(t)表示系統輸出,e(t)為偏差信號,Kp、KI、KD分別是比例、積分、微分系數,均與e(t)呈非線性關系,其表達式為:
(15)
式(15)中,ap、bP、cP和aI、bI、CI等參數是用于現場在線調試的常數因子,w為積分時間調節因子.
3 Matlab仿真結果
設鼓風機調速系統離散化后的非線性表達式如下所示:
y(k)=a·y(k-1)/1+y(k-1)2+
b·u(k-1)y(k-1)+c·u(k-1)
(16)
式中,y(k)是正常工況下第k個采樣點初冷器前吸力的實際輸出值,y(k-1)是第k-1個采樣點的吸力輸出值,u(k-1)是第k-1個采樣點變頻器的控制量,a,b,c均為系統被控對象模型參數,這里設a=0.35,b=0.1,c=0.5.
在Matlab仿真時,取300個采樣點,采樣時間ts為1s,仿真時間300s,按照該焦化廠對初冷器前吸力大小的要求,設置參考輸入,即吸力的設定值在0~100s時間內為-1KPa,100~200s時間內為-1.4Kpa,200~300s時間內為-1.2KPa.為模擬生產現場初冷器前吸力實時波動性和由于推焦、出煤、高壓氨水噴灑等人工操作帶來的強干擾,分別在采樣時刻140s和240s時給定+0.4KPa和-0.2KPa的擾動信號.具體仿真結果如下:
圖3和4分別是僅采用單一控制器的控制效果.由圖中可以看出,圖3僅采用LSSVM_IMC,在參考輸入變化較大及干擾發生時,系統都產生了不同程度的振蕩調節,部分超調量過大.圖4僅采用非線性PID,在第一次較強擾動信號來臨時,系統發生了強烈的振蕩,持續時間長,其他部分時刻超調量較大.
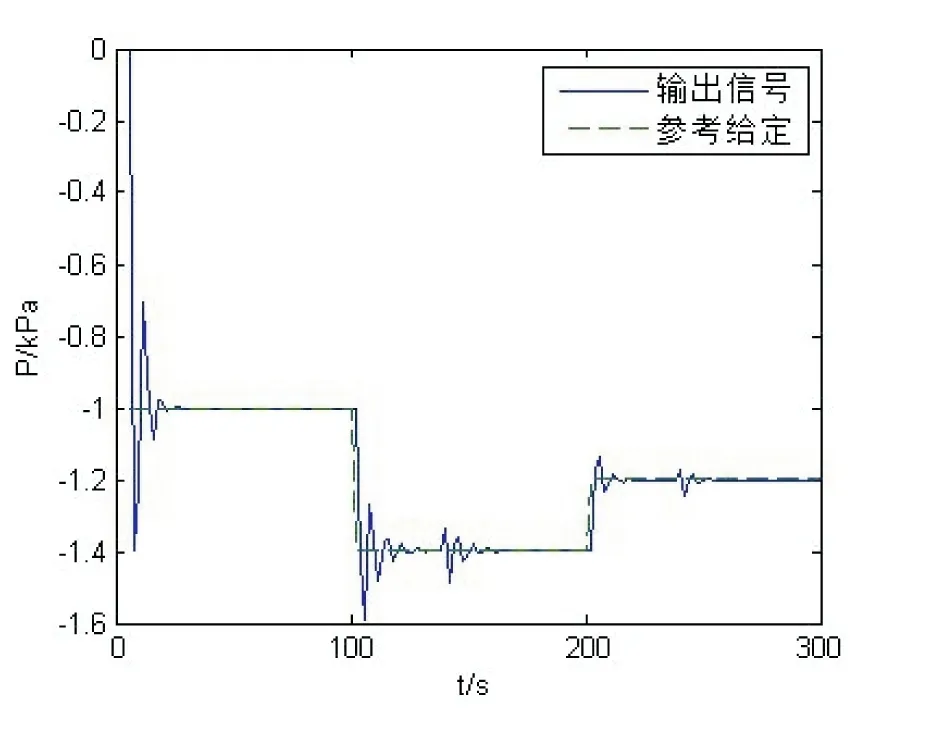
圖3 僅LSSVM_IMC控制效果

圖4 僅非線性PID控制器控制效果

圖5 智能切換控制器控制效果
圖5所示為外加兩次干擾情況下智能切換控制器的控制效果.由圖可見,在140s時刻產生+0.4KPa,以及240s時刻產生-0.2KPa的外部擾動時,系統都隨之出現了短時間的振蕩,但是超調量小、調節時間短,很快就恢復了對給定信號的跟蹤響應,說明該智能切換控制器能夠較好地消除不同程度的未知干擾,具有良好魯棒性.
綜上,LSSVM_IMC及非線性PID需要相互協調控制,其組成的智能切換控制器對系統產生的不可測干擾具有良好地抑制消除作用,能夠較好地輸出跟蹤給定值,控制快速、準確、穩定,魯棒性強.
4 結論
本文針對焦爐鼓風機調速系統,根據煉焦生產中正常和非正常兩種工況條件,分別采用基于最小二乘支持向量機的內模控制器(LSSVM_IMC)與非線性PID控制器組成智能切換控制器,穩定控制初冷器前吸力大小,進而使集氣管壓力保持在合理范圍.Matlab仿真結果表明,設計的LSSVM_IMC模型辨識度高,具有良好的動態性能和控制精度,在正常生產工況下可以消除不可測干擾的影響;非線性PID控制器簡單有效,能夠快速消除非正常工況下的強擾動,及時恢復系統穩定.兩者需要通過自動切換實現協調控制,整體控制效果良好,具有一定的應用價值和推廣作用.
[1]徐竟天.焦化爐集氣管壓力計算機監控系統開發[D].西安:西安石油大學,2005.
[2]Chunhua Yang,Min Wu,Deyao Shen,Geert Deconinck.Hybrid intelligent control of gas collectors of coke ovens[J].Control Engineering Practice,2001,9(7):725-733.
[3]舒雄鷹.雙焦爐集氣管壓力智能控制系統[J].自動化與儀表,2003,18(1):39-41.
[4]張世峰,周建芳. 焦爐集氣管壓力自適應預測解耦控制系統設計[J].重慶大學學報,2009,32(1):105-110.
[5]胡良謀,曹克強,徐浩軍.支持向量機故障診斷及控制技術[M].北京:國防工業出版社,2011.
[6]何熠.基于支持向量機的非線性系統辨識建模與控制[D].天津:天津大學,2006.
[7]張金花,張世峰,何福金.基于多模型切換的焦爐鼓風機調速系統智能控制策略研究與應用[J].冶金自動化,2010,34(3):10-13.
[8]Suykens J.A.K,Vanderwalle J.Least squares support vector machines classifiers[J].Neural Processing Letters,1999,9(3):293-300.
(責任編輯:王前)
10.13877/j.cnki.cn22-1284.2016.08.004
2016-07-04
羅家毅,男,安徽馬鞍山人,教師.
TP23
A
1008-7974(2016)04-0012-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32