多無人平臺持續(xù)作業(yè)調(diào)度問題
2018-08-16 07:16:12宋志強周獻中
系統(tǒng)管理學報 2018年5期
關(guān)鍵詞:作業(yè)
宋志強,周獻中
(1.南京大學 工程管理學院,南京 210008;2.蘇州經(jīng)貿(mào)職業(yè)技術(shù)學院 機電與信息技術(shù)學院,浙江 蘇州 215009)
2012年,美國空軍學院開始進行一項“無人系統(tǒng)協(xié)同技術(shù)”的研究工作,進行不同類型多無人平臺協(xié)同目標跟蹤的研究,將探索融合無人平臺不同類型傳感器的數(shù)據(jù),以提高地理定位移動目標的準確性,加強作戰(zhàn)優(yōu)勢。無人平臺(Unmanned Vechile,UV)可分為無人機(Unmanned Aerial Vehicle,UAV)、無人車(地面無人平臺)(Unmanned Ground Vehicle,UGV ) 和無人艇 (Unmanned SurfaceVehicle,USV)等。自1917年英國人研制出世界上第1架無人機,無人機經(jīng)歷了近百年的發(fā)展歷程。無人機在海灣戰(zhàn)爭、科索沃戰(zhàn)爭、阿富汗戰(zhàn)爭、伊拉克戰(zhàn)爭和利比亞戰(zhàn)爭中廣泛使用并表現(xiàn)優(yōu)異,世界各軍事強國都在積極研制本國的無人機[1]。2011年2月和4月,美國高智能化的作戰(zhàn)型無人機諾斯羅普·格魯門X-47B、“幽靈射線”無人戰(zhàn)斗機完成首飛;2014年,美國多次出動無人機空襲IS極端武裝。無人機除在軍用方面,在民用方面也具有其潛在的應(yīng)用,如災(zāi)難拯救、智能視頻監(jiān)控、海上搜救和空間探測等。地面無人平臺就是在地面上行駛的能執(zhí)行特定任務(wù)的機器人,是機械化、信息化、智能化高度融合的機動平臺。地面無人平臺技術(shù)除軍事應(yīng)用外,在民用方面也具有非常廣闊的應(yīng)用前景,如許多高溫、高寒、荒漠區(qū)域,需要地面無人平臺探測開發(fā);另外,工業(yè)制造、農(nóng)耕作業(yè)、科學考察、搶險救災(zāi)、排爆、救援以及交通運輸?shù)阮I(lǐng)域都需要智能化的地面無人平臺。
單無人平臺由于其視線遮擋、運動限制、能量受限等因素,常常不能實現(xiàn)對目標進行連續(xù)作業(yè),因此需要多無人平臺協(xié)作以維持對目標的持續(xù)作業(yè),從而獲得更好的效果。多無人平臺在發(fā)現(xiàn)、跟蹤目標和搜救等方面具有重要的應(yīng)用價值,如可對目標持續(xù)監(jiān)視、跟蹤,以防止目標失聯(lián)。由于燃料或電池容量問題,無人平臺的續(xù)航時間常受到限制。在沒有后勤保障的情況下,無人平臺的持續(xù)作業(yè)能力是其應(yīng)用的瓶頸,如果無人平臺具有良好的持續(xù)作業(yè)能力,那么,無人平臺的服務(wù)能力將顯著增強。配備有能夠完成無人平臺加油、電池更換或充電等操作的自動補給站的多無人平臺系統(tǒng)使無人平臺持續(xù)作業(yè)成為可能。當一個無人平臺能量不足時,其可將任務(wù)移交給其他能量充足的無人平臺繼續(xù)執(zhí)行任務(wù),而能量不足的無人平臺從附近的自動補給站尋求補給。本文考慮未來將多無人平臺應(yīng)用于需要持續(xù)作業(yè)的應(yīng)急救援場合,建立問題模型,通過多無人平臺和自動補給站的調(diào)度,實行多無人平臺系統(tǒng)的持續(xù)作業(yè)。
無人平臺中的無人機是目前主要的研究對象,多無人機協(xié)同問題研究是當今研究熱點,主要涉及協(xié)同偵察、協(xié)同搜索、協(xié)同探測與感知、協(xié)同任務(wù)規(guī)劃、協(xié)同跟蹤、協(xié)同路徑跟隨與編隊控制等問題。文獻[2]中研究多無人機協(xié)同偵察問題,文獻[3-5]中研究多無人機協(xié)同搜索問題,文獻[6-7]中研究協(xié)同多無人機探測與感知問題。對于協(xié)同跟蹤問題,目前研究最多的一類協(xié)同跟蹤為協(xié)同對峙跟蹤[8-9]。文獻[10]中介紹了空中和地面機器人協(xié)同工作以完成火災(zāi)監(jiān)測和滅火任務(wù),并描述了系統(tǒng)架構(gòu)。文獻[11]中研究在動態(tài)不確定環(huán)境下多無人機實時任務(wù)
分配問題。文獻[12]中將多無人機任務(wù)規(guī)劃問題建模為標準車輛路由問題。文獻[13]中研究了任務(wù)同步情形下的無人機資源調(diào)度問題。上述文獻均未考慮無人機的能量約束問題。文獻[14]中開發(fā)了為無人機補給的自動服務(wù)站,使多無人機持續(xù)作業(yè)成為可能。文獻[15-17]中研究了多無人機持續(xù)作業(yè)問題,但系統(tǒng)考慮僅存在一個具有多端口的服務(wù)站情形,即沒有考慮存在地理上分散的多個服務(wù)站的問題。文獻[18]中研究了具有地理上分散的自動補給站支持的多無人機持續(xù)作業(yè)問題,僅將多無人機的總飛行距離作為目標函數(shù),沒有考慮各無人機的出行成本。
文獻[18]中提出的模型目標函數(shù)僅是最小化總距離,即只考慮同構(gòu)平臺,而由于異構(gòu)無人平臺構(gòu)成的系統(tǒng)更具普遍意義。因此,本文考慮由于無人平臺型號、功能等的不同,引起的無人平臺出動成本的不同,將其也納入目標函數(shù);同時,考慮無人機的飛行距離與出行成本,更符合實際情況。
1 情景想定
鑒于已有電池更換系統(tǒng)[19]應(yīng)用于無人機,在此假想未來多無人機系統(tǒng)在執(zhí)行應(yīng)急任務(wù)時,具有地理位置分散的自動補給站作為后勤保障,無人平臺在自動補給站可完成加油或電池更換等能量補充,也可在自動補給站裝配應(yīng)急物資等,以便多無人平臺能夠持續(xù)、不間斷地完成任務(wù)。圖1為具有3個補給站、4架無人機和3個目標的示例系統(tǒng)。
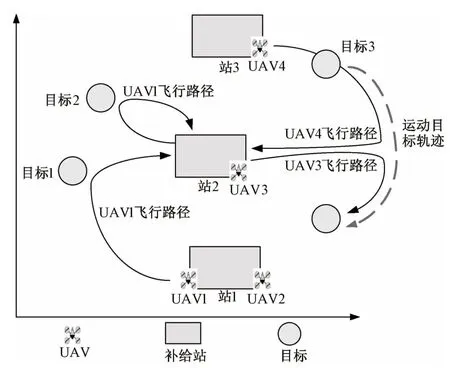
圖1 具有3個補給站、4架無人機和3個任務(wù)的示例系統(tǒng)
為了解決無人平臺能量有限的問題,本文提出多無人平臺共享地理上分散的自動補給站的思想,設(shè)計調(diào)度算法來協(xié)調(diào)任務(wù)。假定無人平臺要完成的任務(wù)的時空軌跡是確定的,至少有一個無人平臺執(zhí)行任務(wù)。如圖1所示,多無人機系統(tǒng)任務(wù)是為時空軌跡確定的3個目標提供不間斷的服務(wù),其中目標1和目標2是靜止的,均為待無人機服務(wù)的應(yīng)急需求點。3個候選自動補給站分布于任務(wù)空間,它們可被任一無人機使用。其中的一個可行方案為UAV1從自動補給站1出發(fā),先向目標2提供服務(wù);然后飛至自動補給站2補充能源和資源,之后飛至目標2提供服務(wù);最后,返回自動補給站2。無人機的另一任務(wù)是對運動目標3進行護航或跟蹤,由于運動目標3的路徑持續(xù)時間大于無人機的最大飛行時間,則首先由UAV4提供服務(wù),在UAV4出現(xiàn)能量預(yù)警時,將其任務(wù)移交給UAV3,由UAV3完成剩余的服務(wù),而UAV4 飛至自動補給站2 進行補給。在該方案中,UAV2不參與任務(wù)的執(zhí)行。整個系統(tǒng)的協(xié)同可使得任務(wù)不中斷的執(zhí)行。
Kim 等[18]提出通過無人機和服務(wù)站的合理調(diào)度,可使無人機持續(xù)跟蹤給定時空軌跡的思想。借鑒其思想,本文將具有確定性時空軌跡的任務(wù)分為多個子任務(wù)。由于油量或電池容量有限,單個無人平臺可能不能執(zhí)行整個完整的任務(wù),故有必要將一個任務(wù)分為若干個子任務(wù)。如圖2所示,根據(jù)運動目標的軌跡將任務(wù)分為若干子任務(wù),每個子任務(wù)可由一個無人平臺提供服務(wù)。由于假定目標的運動軌跡是確定的,故可獲得每個子任務(wù)的開始和結(jié)束坐標,子任務(wù)i的起始和結(jié)束坐標分別為(x is,y is)、(x ie,y ie)。子任務(wù)的數(shù)量及其位置和時間可預(yù)先確定。用Dij表示子任務(wù)i的終點或自動補給站i至子任務(wù)j的起點或自動補給站j的歐式距離。
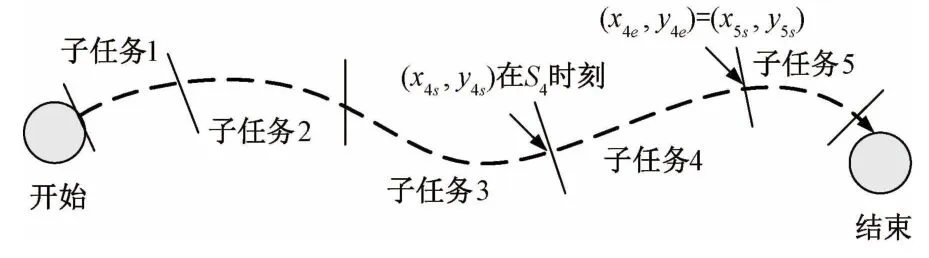
圖2 將運動目標時空軌跡分為子任務(wù)
2 符號定義
各符號含義:
i,j——任務(wù)索引,i,j∈ΩJ={1,2,…,N J}
s——自動補給站索引
k——無人平臺索引,k∈K={1,2,…,NUV}
l——無人平臺第l次出行索引,l∈L={1,2,…,N L}
W t——無人平臺單位距離行進成本
P k——無人平臺出動成本
N J——系統(tǒng)中子任務(wù)數(shù)量
NUV——系統(tǒng)中無人平臺數(shù)量
NSTA——系統(tǒng)中自動補給站數(shù)量
NL——無人平臺出行最大次數(shù)
M——大正數(shù)
Dij——子任務(wù)i的終點或自動補給站i至子任務(wù)j的起點或自動補給站j的距離。注意,由于起點和終點的變化,故Dij不一定等于D ji
Si——子任務(wù)i的開始時間
Ei——子任務(wù)i的結(jié)束時間
H i——子任務(wù)i的處理時間(Ei-Si)
T——無人平臺在自動補給站的補給時間
Qk——無人平臺k的最大續(xù)航時間
Sok——無人平臺k的初始位置
MSk——無人平臺k的最大速度
ΩJ——子任務(wù)集,ΩJ={1,2,…,N J}
ΩSS——無人平臺任務(wù)起始站集,
ΩSS={N J+1,N J+3,…,N J+2NSTA-1}
ΩSE——無人平臺任務(wù)結(jié)束站集,
ΩSE={N J+2,N J+4,…,N J+2NSTA}
ΩA——所有任務(wù)和自動補給站集,ΩA=ΩJ∪ΩSS∪ΩSE
X ijkl——二進制決策變量,若無人平臺k在第l次出行期間,在處理完子任務(wù)i或在站i完成補給后,處理子任務(wù)j或在站j補給,則為1,否則為0
Cikl——決策變量,若無人平臺k在第l次出行期間,執(zhí)行子任務(wù)i開始時間或無人平臺k在站i補給開始時間,否則為0
3 建 模
在此,除考慮無人平臺最大速度約束外,不考慮如無人平臺的其他飛行動力學約束。本文將多無人平臺的持續(xù)作業(yè)調(diào)度問題描述為混合整數(shù)線性規(guī)劃(MILP),目標函數(shù)為最小化無人平臺出行和出動總成本為:
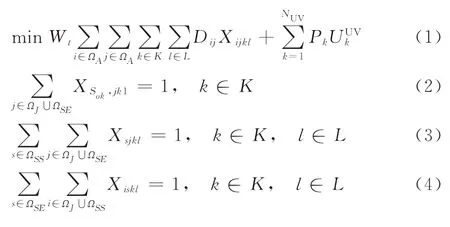
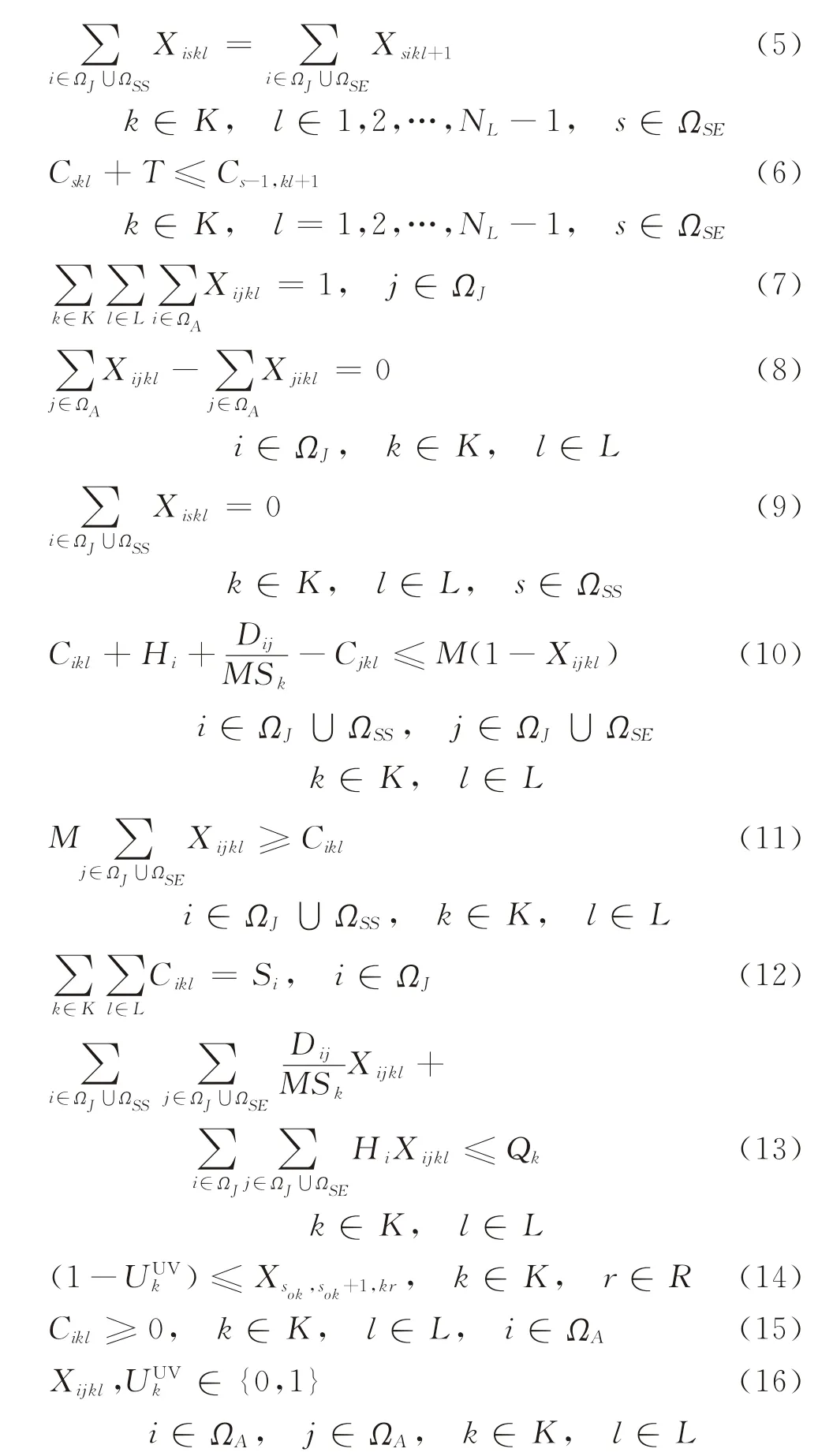
初始自動補給站約束式(2)確保每個無人平臺從其初始自動補給站開始第一次作業(yè)。自動補給站約束式(3)確保每次作業(yè)無人平臺k僅從一個自動補給站出發(fā)至子任務(wù)。式(4)確保無人平臺k每次作業(yè)必須且僅在一個結(jié)束補給站完成。式(5)確保無人平臺k第l次出行結(jié)束站和其l+1次作業(yè)起始站相同。式(6)表明,在同一自動補給站無人平臺第l次出行完成時間與其第l+1次出行開始時間的關(guān)系。子任務(wù)分配約束式(7)確保在ΩJ集中的每個子任務(wù)都能由一個無人平臺處理。式(8)確保無人平臺不能在子任務(wù)上結(jié)束工作。式(9)確保無人平臺不能在起始站(s∈ΩSS)完成作業(yè),此約束來自于每個站有兩個索引。開始時間約束式(10)給出了無人平臺k第l次出行期間子任務(wù)i或站i的補給開始時間與無人平臺下一步動作的關(guān)系。式(11)隱含信息為若子任務(wù)i未分配給第l次出行的無人平臺k,則決策變量Cikl為0。式(12)保證在ΩJ集中的每個子任務(wù)均能在預(yù)先確定的開始時間被執(zhí)行。能量約束式(13)表明,無人平臺k的包括旅途時間和子任務(wù)處理時間在內(nèi)的總出行時間不超過無人平臺k的最大續(xù)航時間。被選中無人平臺約束式(14)確保僅選中的無人平臺去執(zhí)行子任務(wù)。決策變量非負和整數(shù)約束式(15)、(16)限定的決策變量的取值范圍。
由于式(5)、(6)的約束,該數(shù)學模型要求NL>1。NL只是無人平臺出行最大次數(shù),并不限制模型能力。文獻[18]中使用決策變量Y ikl表示UAVk在第l次出行時,子任務(wù)i分配給UAVk,但該信息其實已經(jīng)隱含在決策變量Cikl中,故可刪除。本文所設(shè)計模型比文獻[18]中的模型決策變量要少,從而減少了計算復(fù)雜度。若無人平臺最大出行次數(shù)NL=1,則式(5)、(6)可刪除。
4 算例求解
仿真試驗在PC 機上運行,PC 機配置為Intel(R)Core(TM)2 Duo CPU E7200,2.52 GHz,2 GB內(nèi)存,仿真軟件采用MATLAB 2014a,利用該版本提供的Intlinprog 函數(shù)可較方便地求解MILP問題。
算例1假設(shè)有3 個任務(wù)需要無人平臺來完成,其中任務(wù)1和任務(wù)2需要無人平臺運送應(yīng)急物資至指定位置處,任務(wù)1的坐標在(100,450)處,任務(wù)2的坐標在(150,100)處,任務(wù)3為無人平臺跟隨目標3運動軌跡,任務(wù)3起始坐標為(590,590),終止坐標為(590,11)。有3個候選自動補給站(Station),Station1 坐標為(50,200),初始有UV1和UV2,Station2的坐標為(500,600),初始有UV3和UV4,Station3 的坐標為(450,300),初始有UV5。系統(tǒng)初始部署圖如圖3所示。
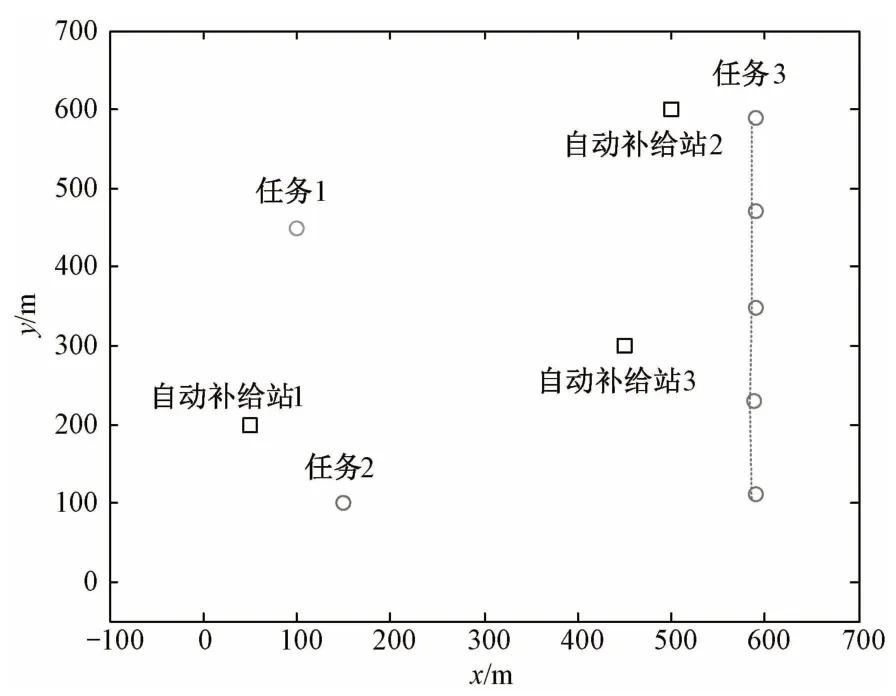
圖3 系統(tǒng)初始部署圖
將3個任務(wù)分為6個子任務(wù),假設(shè)每個子任務(wù)的處理時間均為2 min,子任務(wù)信息如表1所示,將任務(wù)3分解為子任務(wù)1、2、3、4。任務(wù)1、2即子任務(wù)5、6。
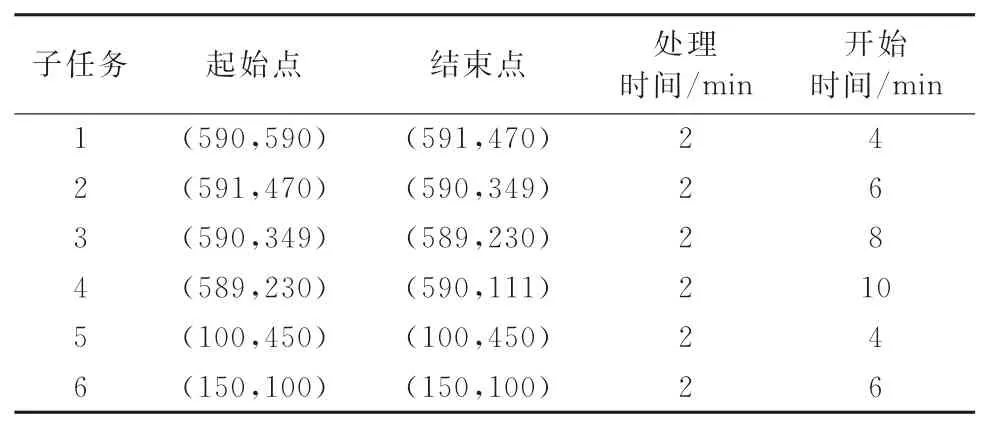
表1 算例1的3個任務(wù)分成6個子任務(wù)的信息
仿真參數(shù)表如表2所示。
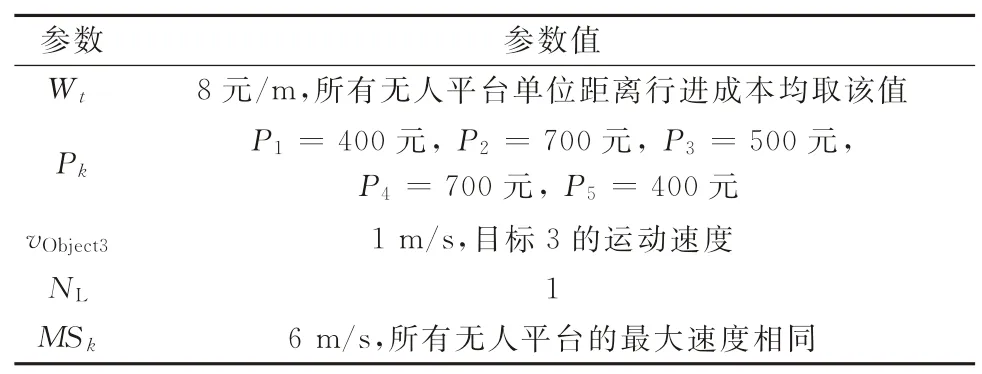
表2 仿真參數(shù)表
將上述MILP問題在Matlab 2014a中求解,當無人平臺的最大續(xù)航時間Qk=16 min時,UV1從自動補給站1出發(fā),先執(zhí)行子任務(wù)5(即任務(wù)1),接著執(zhí)行子任務(wù)6(即任務(wù)2),然后返回自動補給站1;UV3從自動補給2站出發(fā),依次執(zhí)行子任務(wù)1、2、3、4,然后至自動補給站3。整個過程總費用為13 337.5元,期間UV2、UV4、UV5 不參與任務(wù)執(zhí)行。由于Qk=16 min,UV3從自動補給2站出發(fā),依次執(zhí)行子任務(wù)1、2、3、4,返回自動補給站3,不違反式(13)的約束條件,故由UV3完成任務(wù)1。
當無人平臺的最大續(xù)航時間Qk=8 min時,受式(10)約束,UV1從自動補給站1出發(fā),執(zhí)行子任務(wù)5(即任務(wù)1),然后返回自動補給站1;UV2從自動補給站1出發(fā),執(zhí)行子任務(wù)6(即任務(wù)2),然后返回自動補給站1。受式(13)約束,UV3從自動補給2站出發(fā),執(zhí)行子任務(wù)1、2后,然后至自動補給站3補給;UV5從自動補給3 站出發(fā),執(zhí)行子任務(wù)3、4后,返回自動補給站3。由于最大續(xù)航時間的約束,由子任務(wù)1、2、3、4組成的任務(wù)1由UV3、UV5協(xié)作完成,對于任務(wù)1而言,由于多無人平臺的“接力”,彌補了單一無人平臺由于能量有限而無法完成整個任務(wù)的缺點,實現(xiàn)了多無人平臺持續(xù)不間斷地作業(yè)。整個過程總費用為¥16 453,期間UV4不參與任務(wù)執(zhí)行。
算例2假設(shè)由無人平臺進行邊境巡邏,自動補給站1 位于(300,600),自動補站2 位于(600,300)處,開始時UV1、UV2分別位于站1、站2,有4條巡邏路徑需無人機遵循,各路徑的起點、終點如圖4所示。
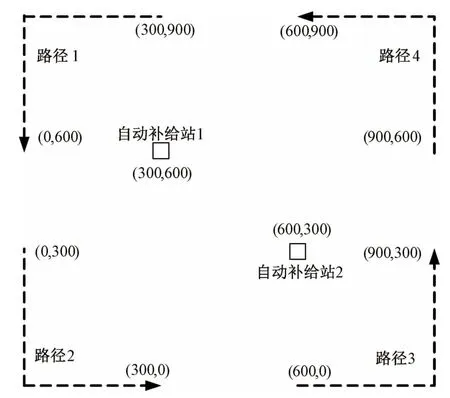
圖4 無人平臺邊境巡邏部署圖
路徑1、2、3、4需分別于6、18、6、18 min開始,無人平臺的最大速度為150 m/min,如表3所示,將整個巡邏任務(wù)分為8個子任務(wù),各無人平臺的最大續(xù)航時間Qk=15 min。
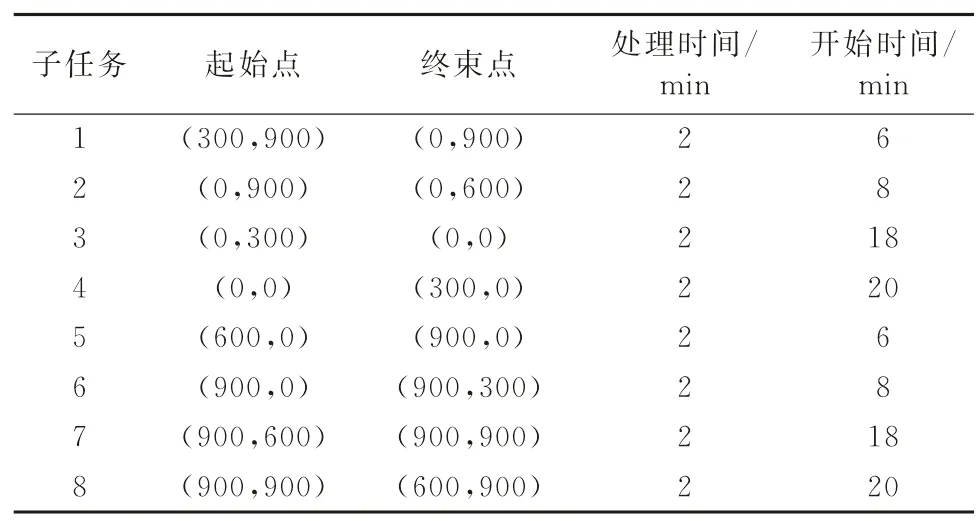
表3 算例2的8個子任務(wù)信息
W t=8 元/m,UV1 的P1=400 元,UV2 的P2=700元,用Matlab 2014a可求得最優(yōu)解:UV1從站1出發(fā),完成子任務(wù)1、2、3、4,然后進入站2補給。UV2從站2出發(fā),完成子任務(wù)5、6、7、8后進入站1補給,整個過程總費用為27 088元。
5 結(jié)語
無人平臺由于電池壽命或燃料量的限制,其應(yīng)用受到制約,單一無人平臺不能進行持續(xù)作業(yè)。具備地理上分散的自動補給站支持的多無人平臺系統(tǒng)可完成持續(xù)時間長的任務(wù)。對于確定性任務(wù)而言,無人平臺在作業(yè)時若能量即將耗盡,則可至附近自動補給站獲得補給,而后再次作業(yè)或在自動補給站待命。同時,其他無人平臺接替該無人平臺的工作,繼續(xù)任務(wù)的執(zhí)行。通過自動補給站,任務(wù)可被多個無人平臺以“接力”的形式不間斷地執(zhí)行。本文將多無人平臺任務(wù)調(diào)度問題建模為混合整數(shù)線性規(guī)劃(MILP)問題,并用Matatb 2014a求解實例。結(jié)果表明,多無人平臺持續(xù)作業(yè)調(diào)度可提高系統(tǒng)的自主性和實用性。用啟發(fā)式或智能算法來解決MILP問題[20]是今后該領(lǐng)域的努力方向。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
