基于CAN總線的電動汽車踏板、換擋系統建模與故障診斷仿真
2019-04-16 07:55:54崔淑華公彥峰
重慶理工大學學報(自然科學) 2019年3期
崔淑華,公彥峰
(東北林業大學 交通學院, 哈爾濱 150040)
電動汽車的加速踏板、制動踏板根據駕駛員的操作產生相應角度并轉變為電壓信號,電壓信號通過傳感器傳遞到整車控制器,將模擬信號轉化成數字信號,整車控制器根據自身算法將電壓信號傳遞給相應的控制器,各分控器再對接收的信號及時響應實現制動或加速,從而完成駕駛員的行駛意圖。如在緊急制動中,駕駛員迅速將制動踏板踏到底時,電子制動系統會提前感知駕駛員的制動意圖,在駕駛員未將制動踏板踏到底時即提供最大制動力[1-2]。
電動汽車的動力通過電機與固定速率比的減、差速器連接驅動汽車行駛,其擋位的切換通過手動操作機械開關,依靠電控單元信號控制電機的轉動來實現。純電動汽車傳動系統至少需要3個擋位來滿足其行駛要求,包括前進擋(D)、空擋(N)以及倒擋(R)。純電動車在低速時電機應能夠提供較大的轉矩以滿足汽車爬坡能力的要求,在電機最大功率下要實現低轉矩高轉速,以使電動汽車具有良好的加速性能[3]。因此,對于電動汽車而言,整車控制器控制策略和算法的合理性非常重要。
電動汽車在加速、制動或換擋過程中存在故障時,可通過讀取儲存器里的故障代碼信息,確定故障類型和相關部位,使故障的排除更加準確。隨著CAN總線技術在汽車控制中應用的成熟化,使得電動汽車的診斷變得更加便捷。CAN總線作為各電控單元之間信息交換的一種串行協議,由于其具有高性能、高可靠性、實時性等優點,被廣泛應用到汽車網絡上。并且CAN總線通訊頻率高、傳輸速度快,采用定時發送和接收信息的方式,可滿足整車通訊的要求[4-5]。將加速、制動和換擋時所產生的電壓信號以CAN信號的方式經過EVCAN進行各電控單元信息交互,通過外部設備對其信號進行讀取。當汽車出現故障時,汽車自診斷系統會以儀表盤上的故障指示燈閃爍的方式提示駕駛員,儲存器會把這些故障代碼儲存在相應的位置,并保持這部分持續供電,使儲存的內容不會丟失。而外部設備的使用就是對這些所儲存的數據進行調取、拆分和顯示。
1 Simulink模型與故障分析
Matlab/Simulink是汽車電子控制領域應用較多的一款軟件,它不僅提供圖形化編程環境,而且可根據模型生成、測試和配置C代碼。通過與其他軟件配合可實現在線標定與離線燒錄功能,從而滿足整車控制器電控系統的開發與應用需求[6]。
加速踏板和制動踏板開度的信號通過兩路采集。在建模過程中首先通過測量得到實際踏板開度的電壓信號值,并根據一定比例設定模型中其傳感器閾值的上下限,如圖1、圖2所示,為保證電壓信號的同步性,兩路傳感器的采集電壓不同,兩者約為2倍關系。換擋模型中的3個擋位應為互斥關系,即不能出現兩個擋位并存的情況,否則輸出擋位錯誤故障信息,擋位切換時必須踩制動踏板,在車速大于4.5 km/h時,為保證車輛的安全性,換擋器鎖止無法切換擋位。擋位邏輯信號輸出如表1所示,依據真值表里設定的值確定當前擋位,系統模型采集信號周期為10 ms。如果在操作過程中出現故障,每個故障都會通過一個計數器模塊,若該故障在一定周期內超過50次,則確定出現故障,故障部位的相關模塊輸出故障信息,其故障計數模塊模型如圖3所示。常數最大值Max_Lin取50,最小值Min_release要小于50,在模型中取25,Input_Bool為故障電信號輸入端。制動踏板、加速踏板和擋位功能模型與診斷流程算法模型如圖4、圖5所示。
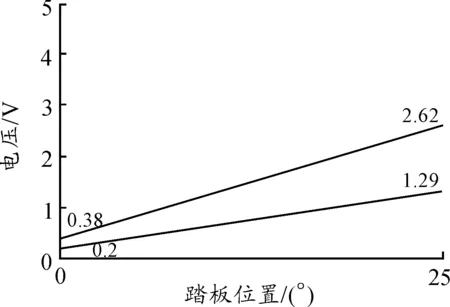
圖1 制動踏板電壓信號輸出
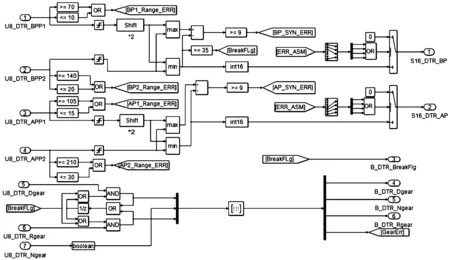
圖4 制動踏板、加速踏板、換擋的功能模型
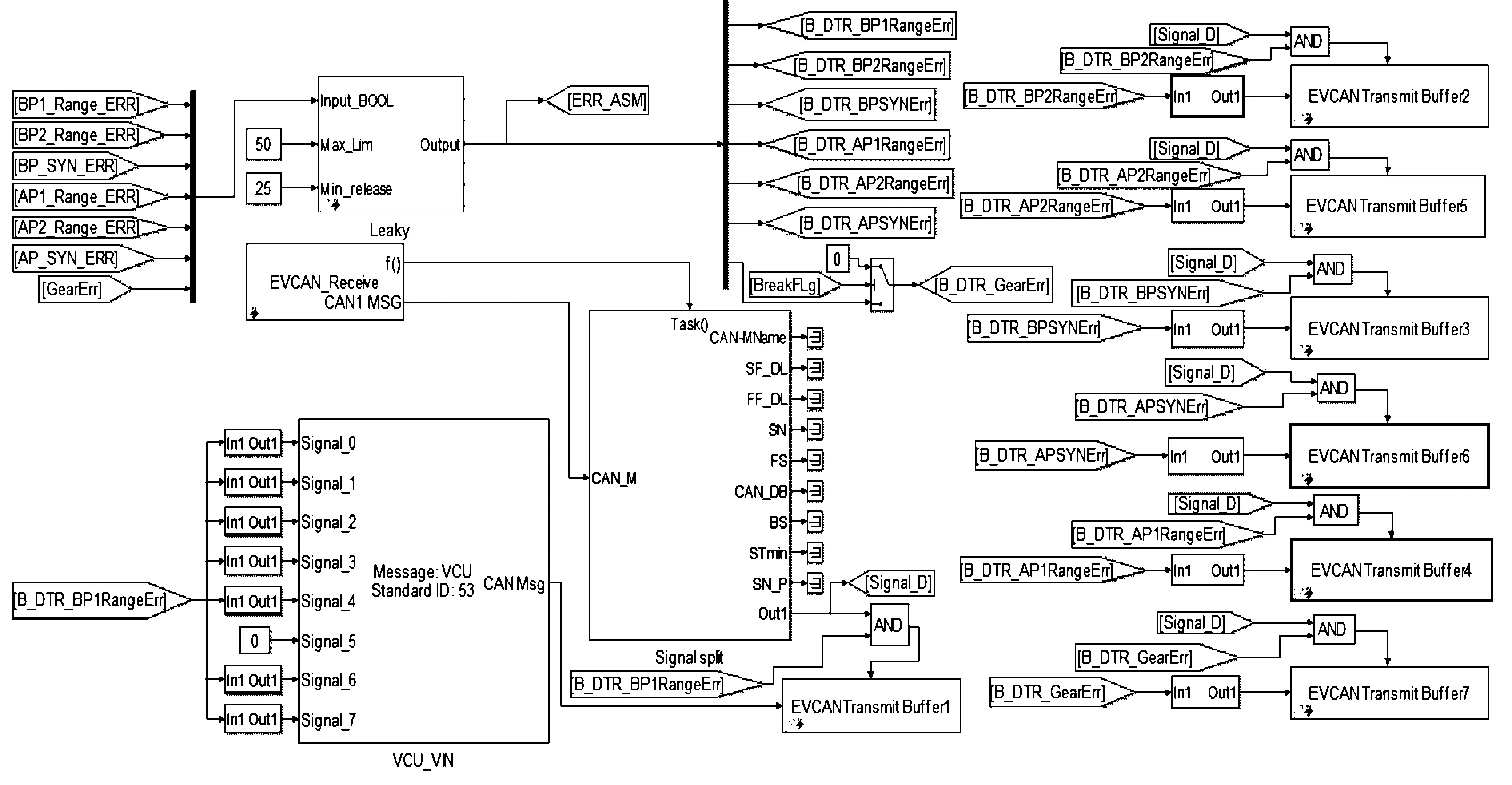
圖5 制動踏板、加速踏板、換擋的診斷流程算法模型
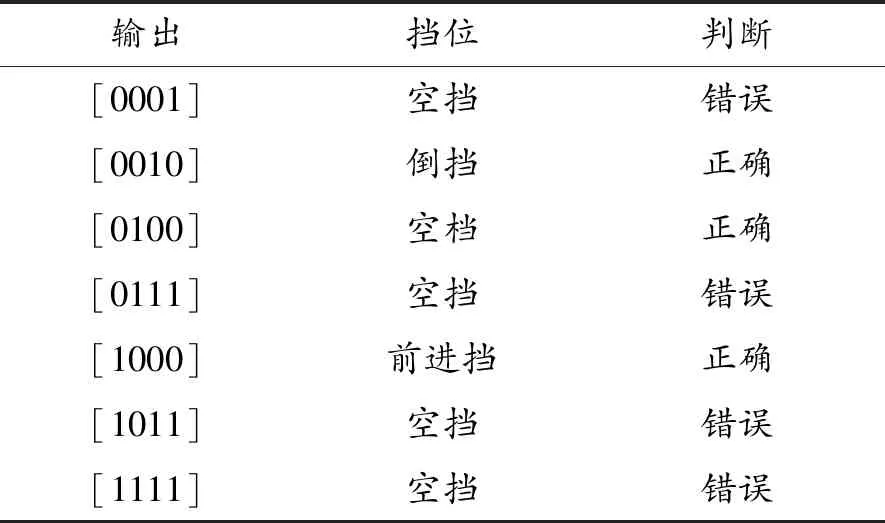
輸出擋位判斷[0001]空擋錯誤[0010]倒擋正確[0100]空檔正確[0111]空擋錯誤[1000]前進擋正確[1011]空擋錯誤[1111]空擋錯誤
加速踏板和制動踏板采集傳感器故障信號的原理基本相同。當傳感器損壞或相關電路短路、斷路時,容易發生傳感器閾值溢出故障,若傳感器機械損壞或機械部件變形,則會導致兩路電壓采集精度不足,產生傳感器同步性故障。在換擋時若傳感器損壞或換擋開關機械零部件變形,可能會造成換擋錯誤故障。當制動踏板和擋位出現故障時,若制動無信號輸出,擋位保持在空擋狀態。當加速踏板和擋位出現故障時,加速踏板無輸出信號,擋位保持在空擋狀態。由于在擋位切換過程中極易出現異常電壓信號,所以只有制動踏板信號的數字量小于35,即制動踏板的角度值小于0.14°時才會進行擋位故障信號的判斷。
2 CAN信號與故障碼格式設定
2.1 CAN信號設定
在各路CAN總線中信號的格式應滿足ISO 15765標準。本文傳輸的信號均為11位CAN標識的標準幀。在外部診斷設備請求電控單元故障數據時,若所要傳輸的數據超過6或7個字節時,發送端會根據一定的規則將數據分組,拆分成首幀和多個連續幀,此時接收端需要發送一幀流控信號,即實現將數據分多次并有一定時間間隔地傳輸給接收端[7]。CAN信號數字段結構與說明如表2、表3所示。
在外部診斷設備讀取相關電控單元故障信息及傳輸數據時,兩者需要服從相關的服務規范標準要求,即電控單元接收到并識別外部設備所傳輸的數據請求,將所需的數據按照所規定的通訊矩陣格式傳輸給外部設備,實現電控單元和數據請求設備之間的信息交換與傳輸[8]。依據ISO 14229服務標準規范,其診斷數據請求的基本服務如表4所示。
表2 數據字段結構

幀類型字節1位7~4位3~0字節2字節3字節4~8單幀0000SF_DLSIDDB1DB2-6首幀0001—FF_DLSIDDB1-5連續幀0010SNDBx1DBx2DBx3-x7流控0011FSBSSTminN/A
表3 數據字段說明
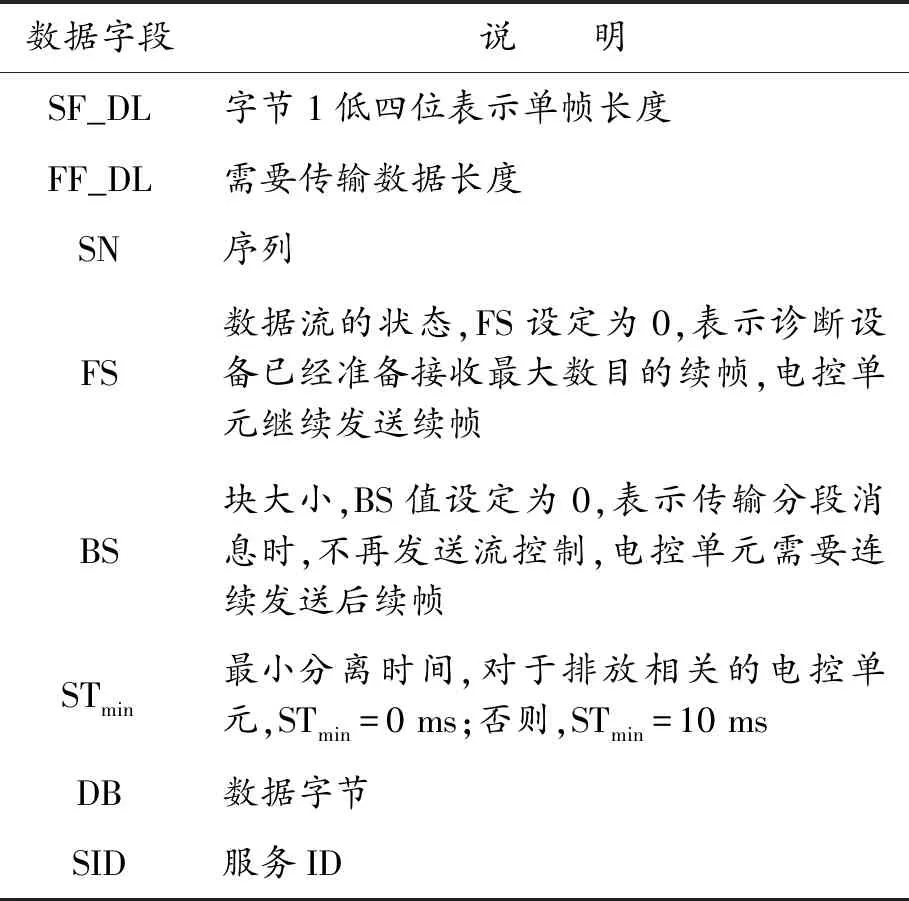
數據字段說 明SF_DL字節1低四位表示單幀長度FF_DL需要傳輸數據長度SN序列FS數據流的狀態,FS設定為0,表示診斷設備已經準備接收最大數目的續幀,電控單元繼續發送續幀 BS塊大小,BS值設定為0,表示傳輸分段消息時,不再發送流控制,電控單元需要連續發送后續幀 STmin最小分離時間,對于排放相關的電控單元,STmin=0 ms;否則,STmin=10 msDB數據字節SID服務ID
表4 診斷服務
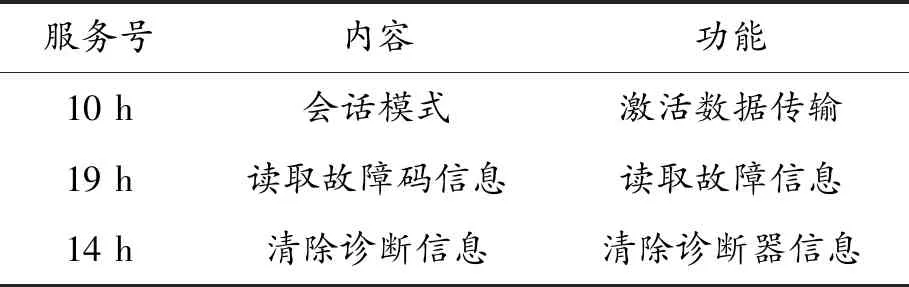
服務號內容功能10 h會話模式激活數據傳輸19 h讀取故障碼信息讀取故障信息14 h清除診斷信息清除診斷器信息
2.2 故障碼設定
汽車系統發生故障時,部分故障可以通過儀表的顯示提示駕駛員,部分故障則需要通過外部診斷儀對電控單元的本地數據進行讀取、識別其故障碼,確定故障部位的范圍以及產生故障的可能原因。通過對故障部位的具體排查和故障排除,從而確定故障具體部位和發生故障的原因。
依據ISO 15301故障碼規范,推薦的故障碼是由3位字節所組成的,故障碼前面是字母數字指示符,其分配應該由最適合該功能的區域決定。代碼的結構如圖6所示。制造商只使用ISO/SAE批準且已經實現行業一致性的部分故障碼。對于汽車制造商所定義的故障碼,由于存在基本系統的差異、實施差異或診斷策略差異,在部分故障定義中,不同的制造商對其故障碼的定義會有所不同。在制造商控制區域分配代碼,設計和規定流程算法、軟件、故障代碼時,每個汽車制造商應在整個產品線上保持一致性[9]。
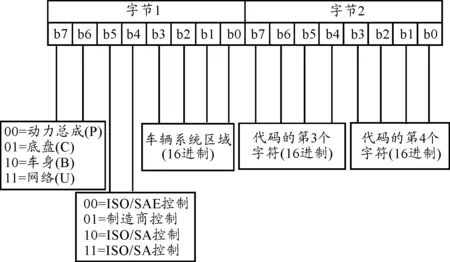
圖6 故障碼結構
診斷數據傳輸時,在故障碼的后面會有一個狀態碼,如表5所示,它表示當前故障碼產生時的一個狀態。在請求故障碼時,數據請求幀的掩碼與電控單元所支持的故障碼掩碼進行與運算,再與電控單元所存在的故障的狀態碼進行與運算,從而確定發生的故障并讀取其故障碼。依據故障碼標準,對加速踏板、制動踏板和換擋模型中可能產生的可測量部位設定故障碼,其制動踏板、加速踏板、換擋故障碼和故障說明如表6所示。
表5 狀態碼
表6 制動踏板、加速踏板、換擋故障碼和故障說明
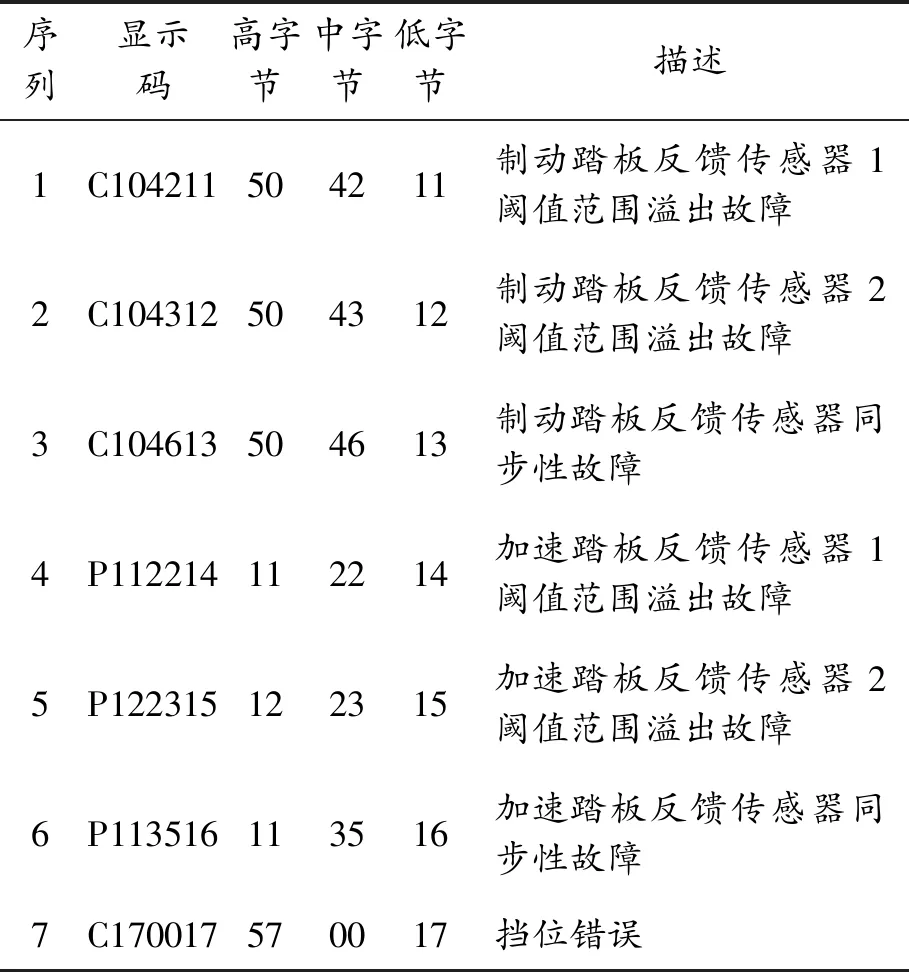
序列顯示碼高字節中字節低字節描述1C104211504211制動踏板反饋傳感器1閾值范圍溢出故障2C104312504312制動踏板反饋傳感器2閾值范圍溢出故障3C104613504613制動踏板反饋傳感器同步性故障4P112214112214加速踏板反饋傳感器1閾值范圍溢出故障5P122315122315加速踏板反饋傳感器2閾值范圍溢出故障6P113516113516加速踏板反饋傳感器同步性故障7C170017570017擋位錯誤
3 Labview上位機數據仿真
本文LabVIEW上位機主要是模擬汽車診斷儀,通過軟件的圖形化仿真實現其診斷功能,通過與汽車整車控制器的連接,將輸出的CAN信號進行拆分、顯示,可模擬實際診斷儀對電控單元的診斷功能[10-11]。
3.1 數據仿真流程
1) VCU程序燒錄與CAN信號的正確性驗證。模擬診斷儀請求VCU數據的CAN信號如表7所示。將通過VCU發送給外部設備的CAN信號數據在CANTEST軟件中顯示,并驗證發送的信息的準確性,其發送內容如表8所示。
2) CAN信號在模擬診斷儀上的仿真顯示。其數據傳輸路徑為VCU——周立功CAN卡——上位機,由于在上位機仿真時的信號源與Simulink不同,所以在上位機顯示故障信號時,需要改變VCU的相關系統的引腳輸入電壓,可使系統產生故障信息。由于改變一個引腳的電壓可能會產生多個故障,可通過去除掉無關部分的算法模型來實現。制動踏板反饋傳感器1閾值范圍溢出故障:將制動踏板反饋傳感器1的輸入引腳電壓變為0 V;制動踏板反饋傳感器2閾值范圍溢出故障:將制動踏板反饋傳感器2的輸入電壓變為0 V;制動踏板反饋傳感器同步性故障:將制動踏板反饋傳感器1或制動踏板反饋傳感器2的引腳輸入電壓為0 V;擋位錯誤:R擋、D擋和N擋中的2個引腳輸入電壓信號為低壓,使2個擋位并存產生錯誤檔位信號。最終可實現相關故障信號的數據傳輸與模擬仿真。在外部設備請求數據以及相關CAN信號傳輸時,其傳輸的故障信息內容應與表7和表8保持一致。
表7 診斷儀請求數據

幀類型數據長度CAN數據標準幀0x0803 19 02 FF 00 00 00 00
表8 CAN信號傳輸內容格式
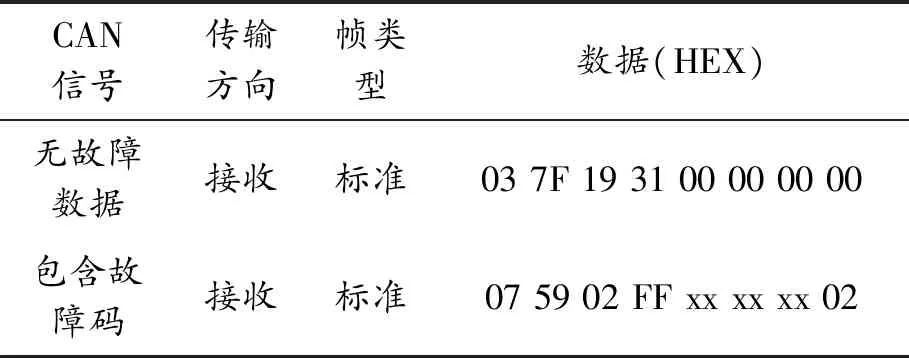
CAN信號傳輸方向幀類型數據(HEX)無故障數據接收標準03 7F 19 31 00 00 00 00包含故障碼接收標準07 59 02 FF xx xx xx 02
3.2 仿真結果
針對制動踏板的故障機理與加速踏板模型相仿,僅針對制動踏板模型和換擋模型故障數據進行仿真,其仿真結果如圖7~10所示。
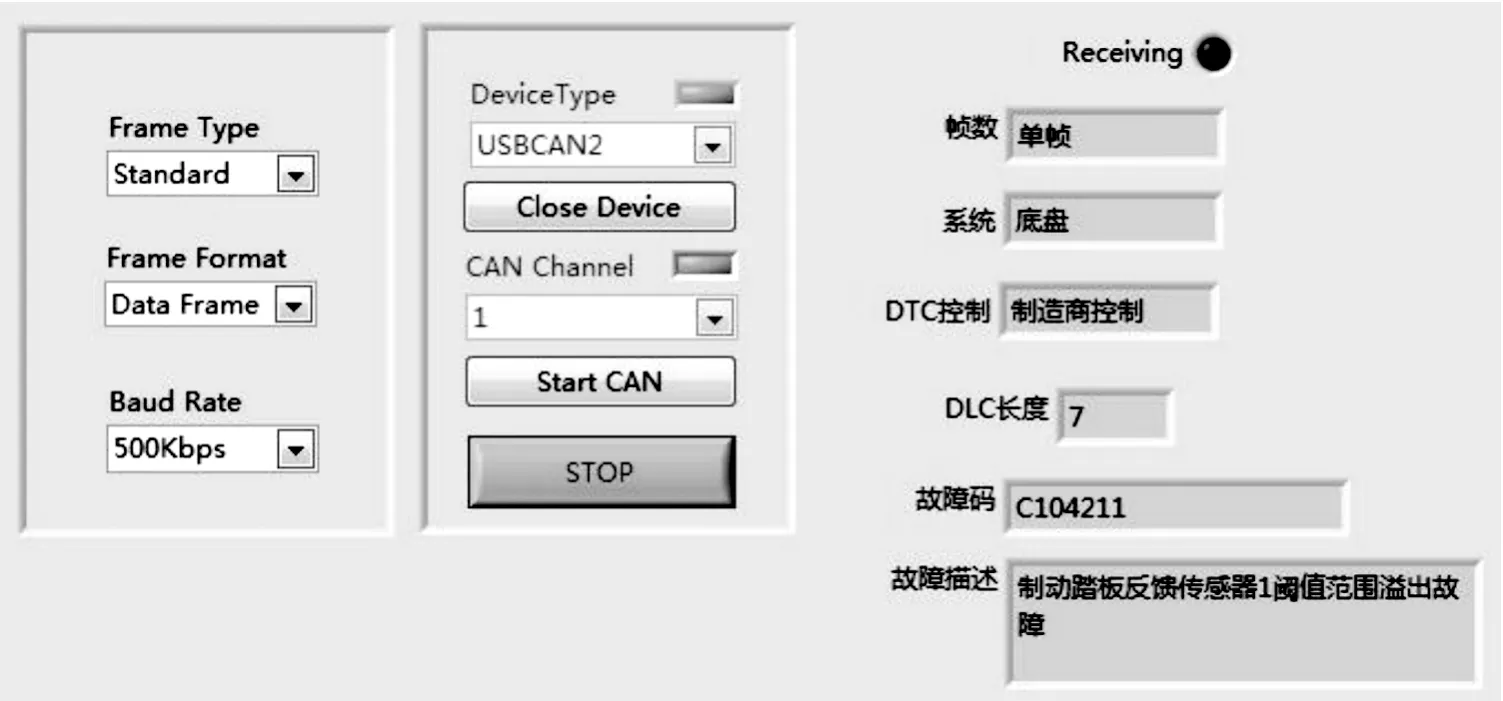
圖7 上位機故障碼仿真1

圖8 上位機故障碼仿真2
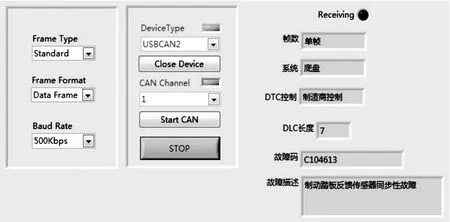
圖9 上位機故障碼仿真3
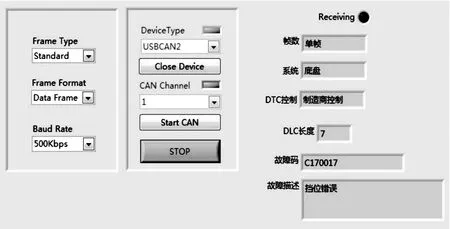
圖10 上位機故障碼仿真4
4 結束語
本文建立了電動汽車加速踏板、制動踏板和換擋系統的Simulink模型以及符合故障診斷的算法模型。CAN信號的格式和故障碼設定符合相關標準的要求,避免出現不合理的幀格式和不規范的故障碼,降低因操作失誤而造成的上位機顯示異常。仿真結果顯示上位機數據仿真過程中并未出現異常現象。
從模型的建立到上位機數據的仿真出發,模擬了外部診斷儀對汽車電控單元中故障碼的請求和讀取,實現了基于Simulink軟件的汽車模型在整車控制器應用層的仿真,對于電動汽車的診斷系統以及診斷儀的設計和研發具有一定意義。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
電子制作(2018年11期)2018-08-04 03:25:42
黃河之聲(2017年13期)2017-01-28 13:30:17
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25